Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения морских целей по их шумоизлучению.
Одной из актуальных практических задач гидроакустики является определение координат морской шумящей цели (далее - цели) по данным шумопеленгаторной станции (далее - ШПС). Для решения этой задачи известно большое число способов, обзор которых приведен в [1].
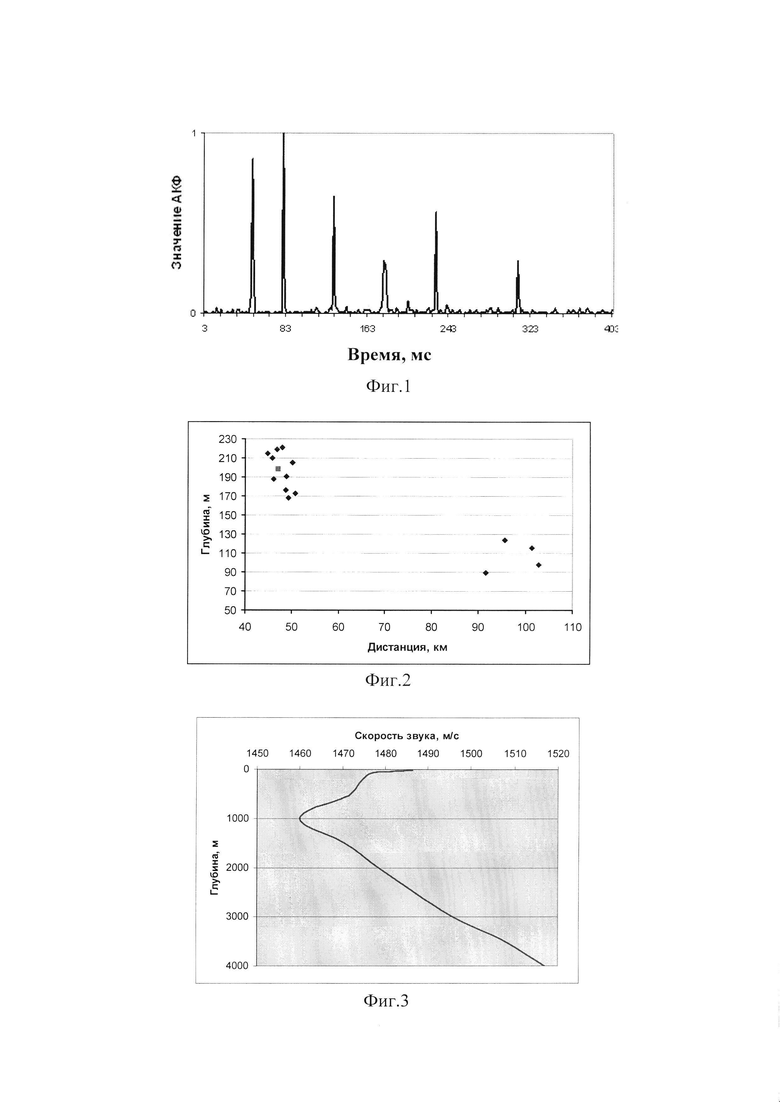
Один из способов базируется на использовании измеренной автокорреляционной функции (АКФ) широкополосного акустического сигнала (далее -сигнала) для определения координат (дистанции и глубины) его источника [1-6]. Информация о координатах источника сигнала (цели) в измеренной АКФ заключена в расположении на оси абсцисс (времени) узкополосных интерференционных максимумов (далее - ИМ), обусловленных интерференцией коррелированных сигналов источника, пришедших на вход приемной гидроакустической антенны (далее - антенны) ШПС по различным лучам. Каждой паре лучей в АКФ (при достаточном отношении сигнал/помеха (далее - ОСП) [7, 8]) соответствует один ИМ с шириной, равной обратной величине эффективной полосы частот сигнала на входе антенны, и положением на оси абсцисс, равным абсолютной величине разности времен распространения сигнала по интерферирующим лучам. На фиг. 1 в качестве иллюстрации приведена АКФ сигнала источника, пришедшего на антенну по четырем акустическим лучам.
Определение координат источника сигнала рассматриваемым способом состоит в поиске такого положения источника сигнала по дистанции и глубине, для которого расчет параметров акустических лучей с использованием программы акустических расчетов [9] показывает наличие в АКФ на выходе антенны ИМ, количество которых и расположение на оси абсцисс максимально близко количеству и расположению ИМ в измеренной АКФ.
Моделирование и экспериментальная апробация данного способа показала, что ему объективно присуща неоднозначность определения местоположения источника сигнала в ряде гидроакустических условий. При этом неоднозначность проявляется тем реже, чем компактнее область пространства по дистанции и глубине в окрестности фактических координат источника, в которой осуществляется поиск положения источника сигнала.
Этот факт проиллюстрирован примером на фиг. 2, на которой маркерами  изображены результаты определения рассматриваемым способом координат источника сигнала на 14-ти последовательных интервалах времени в условиях дальних зон акустической освещенности (ДЗАО). Маркер
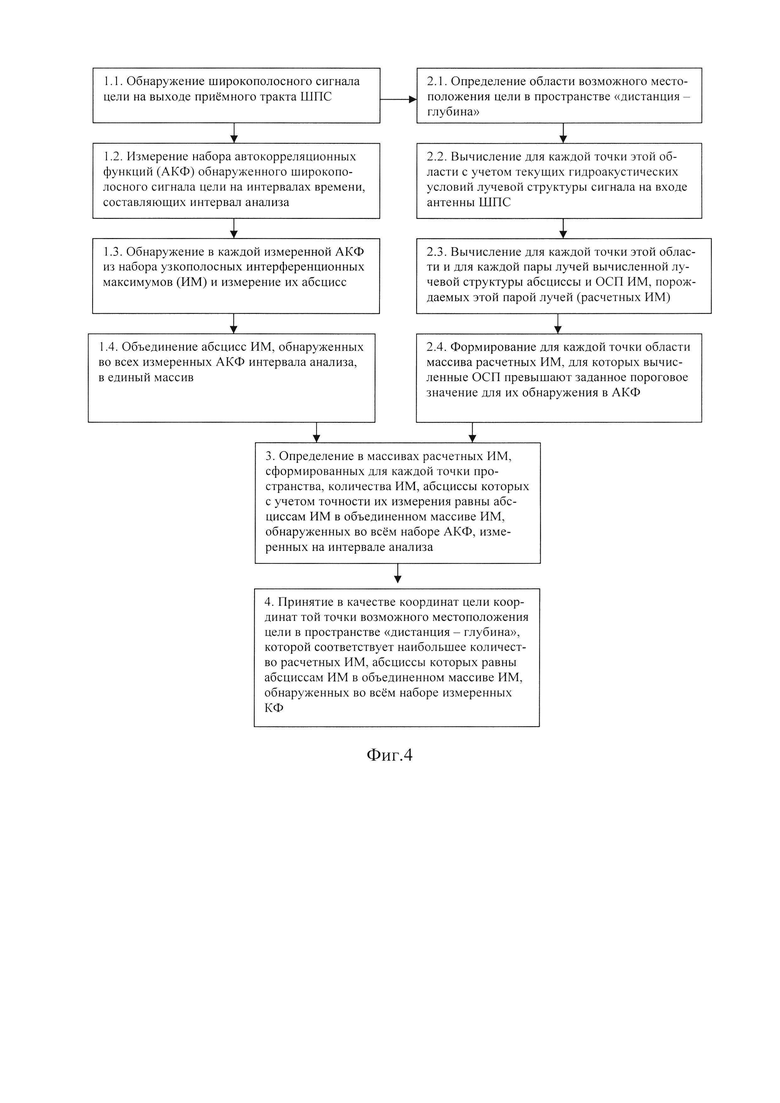
изображены результаты определения рассматриваемым способом координат источника сигнала на 14-ти последовательных интервалах времени в условиях дальних зон акустической освещенности (ДЗАО). Маркер  демонстрирует фактическое положение источника сигнала в 1-й ДЗАО на дистанции 47 м и на глубине 198 м. Соответствующее этим условиям вертикальное распределение скорости звука (ВРСЗ), используемое программой гидроакустических расчетов, изображено на фиг. 3. Ввиду отсутствия априорной информации о классе цели, поиск ее координат осуществлялся в широкой области: по дистанции в 1-й (40-55 км) и 2-й (80-110 км) ДЗАО, по глубине в интервале 5-300 м.
демонстрирует фактическое положение источника сигнала в 1-й ДЗАО на дистанции 47 м и на глубине 198 м. Соответствующее этим условиям вертикальное распределение скорости звука (ВРСЗ), используемое программой гидроакустических расчетов, изображено на фиг. 3. Ввиду отсутствия априорной информации о классе цели, поиск ее координат осуществлялся в широкой области: по дистанции в 1-й (40-55 км) и 2-й (80-110 км) ДЗАО, по глубине в интервале 5-300 м.
Из рассмотрения фиг. 2 следует:
- в 10 случаях вычисленное место источника сигнала лежит близко к его фактическому месту (отмеченному маркером  ), а в 4-х случаях оно оказалось вместо 1-й ДЗАО во 2-й ДЗАО и на значительно меньших глубинах по сравнению с фактической глубиной источника сигнала;
), а в 4-х случаях оно оказалось вместо 1-й ДЗАО во 2-й ДЗАО и на значительно меньших глубинах по сравнению с фактической глубиной источника сигнала;
- если бы местоположение источника сигнала искалось только в 1-й ДЗАО (т.е. в интервале дистанций 45-55 км), больших ошибок удалось бы избежать.
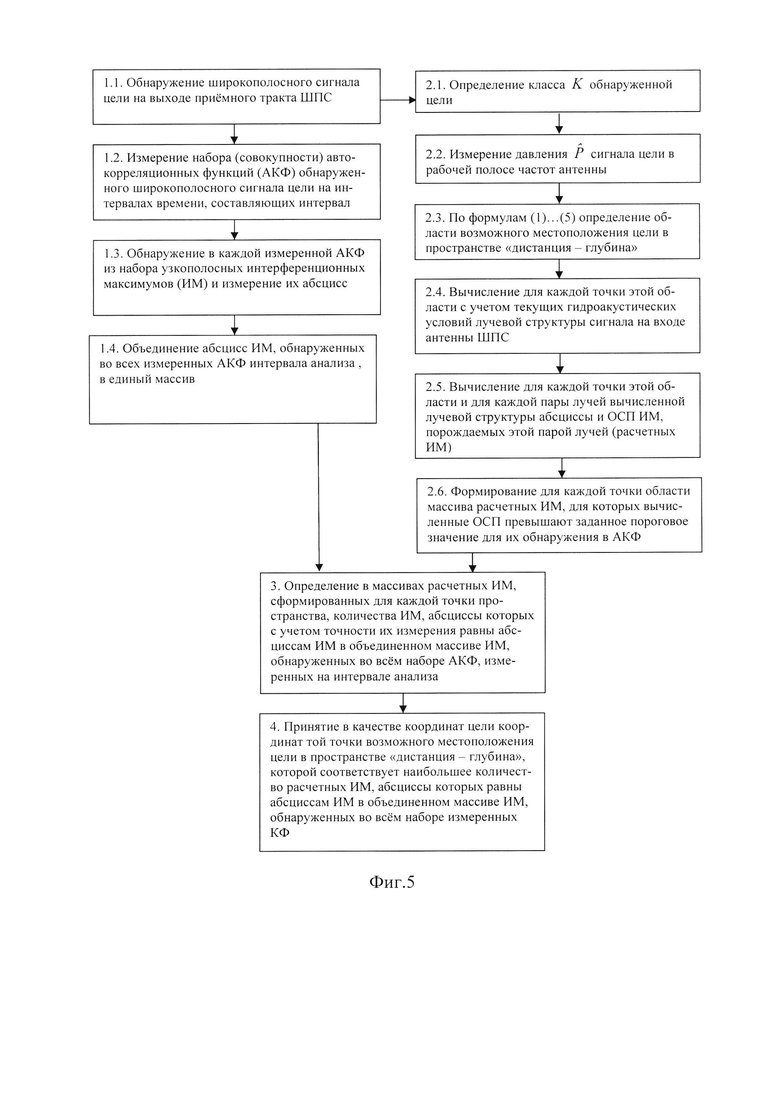
В качестве способа-прототипа выберем изобретение [10]. На фиг. 4 приведена его блок-схема. Обработка поступающей информации ведется по двум параллельным ветвям. Первая (левая) ветвь включает в себя последовательно выполняемые операции обнаружения широкополосного сигнала цели на выходе антенны (блок 1.1); измерения набора АКФ обнаруженного широкополосного сигнала цели на интервалах времени, составляющих интервал анализа (блок 1.2); обнаружения в каждой измеренной АКФ узкополосных ИМ и измерения их абсцисс (блок 1.3); объединения абсцисс ИМ, обнаруженных во всех измеренных АКФ интервала анализа, в единый массив (блок 1.4). Выполнение перечисленных операций обеспечивает формирование массива всех ИМ, измеренных на интервале анализа и готовых к сопоставлению с расчетными данными, формируемыми блоками второй ветви.
Вторая ветвь (правая) включает в себя операции определения области возможного местоположения цели в пространстве «дистанция - глубина» (блок 2.1); вычисления для каждой точки этой области с учетом текущих гидроакустических условий лучевой структуры сигнала на входе антенны ШПС, (блок 2.2); вычисления для каждой точки этой области и для каждой пары лучей вычисленной лучевой структуры значений абсциссы и отношения сигнал/помеха (ОСП) ИМ, порождаемых этой парой лучей (расчетных ИМ) (блок 2.3) и операцию формирования для каждой точки области массива расчетных ИМ, для которых вычисленные ОСП превышают заданное пороговое значение для их обнаружения в АКФ (блок 2.4). Операции второй ветви могут быть выполнены однократно для текущего состояния гидрологических условий, определяющего лучевую структуру сигналов на входе антенны. Выполнение операций второй ветви обеспечивает формирование массива расчетных данных, готовых к сопоставлению с результатами измерений, сформированными первой ветвью.
Сопоставление выполняется последовательно расположенными блоками 3 и 4, выполняющими операции определения в массивах расчетных ИМ, сформированных для каждой точки пространства, количества ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всем наборе АКФ, измеренных на интервале анализа (блок 3) и, наконец, операцию определения координат цели путем выбора координат той точки возможного местоположения цели в пространстве «дистанция - глубина», которой соответствует наибольшее количество расчетных ИМ, абсциссы которых равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всем наборе измеренных АКФ (блок 4).
Недостатком способа-прототипа является возможность появления аномально больших ошибок определения координат цели вследствие произвольного выбора области в пространстве «дистанция - глубина», в котором определяются координаты цели.
Решаемая техническая проблема - повышение эксплуатационных характеристик шумопеленгаторной станции.
Технический результат, обеспечиваемый изобретением - повышение точности определения координат морской шумящей цели.
Указанный технический результат достигается путем определения максимально компактной области возможного местоположения цели в пространстве «дистанция - глубина», в которой в дальнейшем определяются координаты источника согласно способу-прототипу. Для определения этой области используется один из известных способов определения координат источника сигнала, дающих менее точный (по сравнению с рассматриваемым способом), но однозначный результат.
В качестве такого способа выберем способ, описываемый следующей последовательностью действий [1].
1) Измеряется давление  сигнала обнаруженной цели на входе антенны в рабочей полосе частот Δƒ = ƒв - ƒн, где ƒв, ƒн - соответственно верхняя и нижняя граничные частоты рабочей полосы частот.
сигнала обнаруженной цели на входе антенны в рабочей полосе частот Δƒ = ƒв - ƒн, где ƒв, ƒн - соответственно верхняя и нижняя граничные частоты рабочей полосы частот.
2) Одним из известных способов [11-18] определяется класс K цели (например, подводная лодка, надводный корабль).
3) Определяется интервал [Hmin,Hmax] возможных глубин погружения цели класса К. Это достигается путем решения относительно Hmin и Hmax уравнения

при условии

где
gH (h) - плотность распределения вероятностей (ПРВ) глубины цели, соответствующая классу K;
PH - заданная вероятность попадания фактической глубины цели в интервал [Hmin,Hmax].
Формулы (1) и (2) означают, что границы по глубине должны быть такими, чтобы вероятность нахождения в них фактической глубины источника сигнала была равна заданной вероятности PH и при этом интервал глубин был бы минимально возможным.
4) Определяется интервал [Rmin,Rmax] возможных дистанций до цели путем решения относительно Rmm и Rmax уравнения

при условии

где
PR - заданная вероятность попадания фактической дистанции R до морской шумящей цели в интервал [Rmin,Rmax];
 - условная (в зависимости от измеренного давления
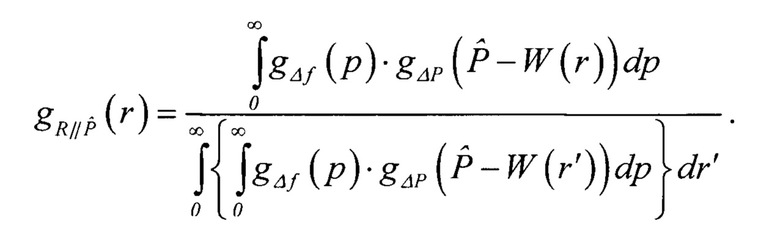
- условная (в зависимости от измеренного давления  сигнала цели в рабочей полосе частот на входе антенны) ПРВ фактической дистанции R до морской шумящей цели, вычисляемая по формуле [19]
сигнала цели в рабочей полосе частот на входе антенны) ПРВ фактической дистанции R до морской шумящей цели, вычисляемая по формуле [19]
r, r' - неслучайные аргументы ПРВ  ;
;
 - ПРВ давления шума цели класса K в рабочем диапазоне частот антенны Δƒ, приведенного к расстоянию 1 м от цели;
- ПРВ давления шума цели класса K в рабочем диапазоне частот антенны Δƒ, приведенного к расстоянию 1 м от цели;
W (г) - зависимость спада давления сигнала от дистанции в рабочем диапазоне частот антенны, вычисленная для текущих гидроакустических условий;
gΔP (x) - ПРВ ошибки ΔР измерения давления сигнала цели  .
.
Формулы (3) и (4) означают, что границы по дистанции должны быть такими, чтобы вероятность нахождения в них фактической дистанции до источника была равна заданной вероятности PR и при этом интервал дистанций
был минимально возможным.
5) В результате перебор точек возможного местоположения цели выполняется в интервале [Hmin,Hmax] по глубине и в интервале [Rmin,Rmax] по дистанции.
Блок-схема функционирования предлагаемого способа приведена на фиг. 5. Обработка поступающей информации ведется по двум параллельным ветвям. Первая (левая) ветвь включает в себя последовательно выполняемые операции обнаружения широкополосного сигнала цели на выходе антенны (блок 1.1); измерения набора АКФ обнаруженного широкополосного сигнала цели на интервалах времени, составляющих интервал анализа (блок 1.2); обнаружения в каждой измеренной АКФ узкополосных ИМ и измерения их абсцисс (блок 1.3); объединения абсцисс ИМ, обнаруженных во всех измеренных АКФ интервала анализа, в единый массив (блок 1.4). Выполнение перечисленных операций обеспечивает формирование массива всех ИМ, измеренных на интервале анализа и готовых к сопоставлению с расчетными данными, формируемыми блоками второй ветви.
Вторая ветвь (правая) начинается с определения класса обнаруженной цели (блок 2.1). Способы определения класса обнаруженной цели описаны в работах [11-18]. В блоке 2.2 осуществляется измерение давления сигнала цели в рабочем диапазоне частот приемной антенны согласно алгоритму, описанному в работе [20]. В блоке 2.3 с использованием формул (1)…(5) определяются границы областей по глубине и дистанции, в которой будет осуществляться определение координат цели. Для каждой точки этой области с учетом текущих гидроакустических условий вычисляется лучевая структура сигнала на входе антенны ШПС (блок 2.4). Далее для каждой точки этой области и для каждой пары лучей вычисленной лучевой структуры вычисляется значение абсциссы и ОСП ИМ, порождаемого этой парой лучей (расчетных ИМ) (блок 2.5). Затем для каждой точки области формируется массив расчетных ИМ, для которых вычисленные ОСП превышают заданное пороговое значение для их обнаружения в АКФ (блок 2.6). Операции второй ветви могут быть выполнены однократно для текущего состояния гидрологических условий, определяющего лучевую структуру сигналов на входе антенны. Выполнение операций второй ветви обеспечивает формирование массива расчетных данных, готовых к сопоставлению с результатами измерений, сформированными первой ветвью.
Сопоставление выполняется последовательно расположенными блоками 3 и 4, выполняющими операции определения в массивах расчетных ИМ, сформированных для каждой точки пространства, количества ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всем наборе АКФ, измеренных на интервале анализа (блок 3) и, наконец, операцию определения координат цели путем выбора координат той точки возможного местоположения цели в пространстве «дистанция - глубина», которой соответствует наибольшее количество расчетных ИМ, абсциссы которых равны абсциссам ИМ в объединенном массиве ИМ, обнаруженных во всем наборе измеренных АКФ (блок 4).
Проверим эффективность заявляемого способа для условий рассмотренного выше примера (фиг. 2 и 3).
В качестве источника сигнала в этом примере рассматривалась подводная лодка (ПЛ), находящаяся в 1-й ДЗАО на расстоянии от приемной антенны 47 км и на глубине 198 м. Давления шума ПЛ в полосе частот 2-4 кГц, приведенное к расстоянию 1 м от цели, составляет 58,5 дБ.
ШПС, антенна которой расположена на глубине 116 м, обнаруживает шумовой сигнал цели и измеряет его давление  на входе антенны в полосе частот Δƒ 2-4 кГц. Пусть это давление составило 1,6 дБ.
на входе антенны в полосе частот Δƒ 2-4 кГц. Пусть это давление составило 1,6 дБ.
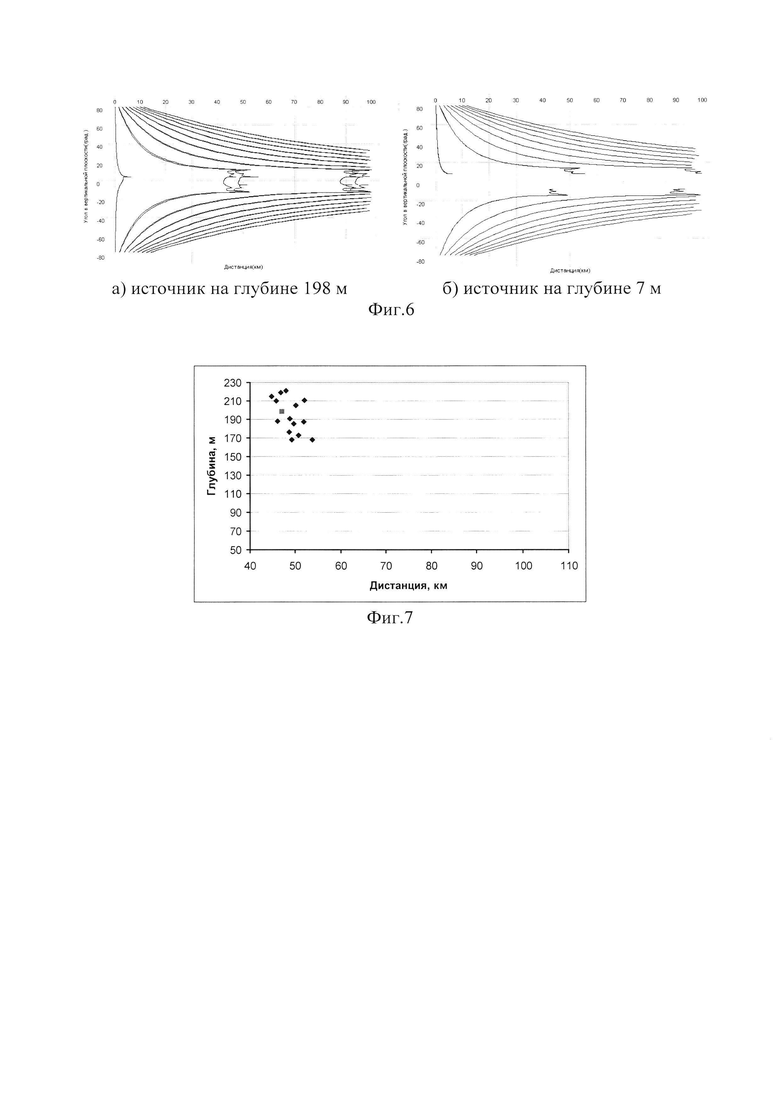
В условиях ДЗАО классификация на классы "ПЛ - надводный корабль" наиболее эффективно осуществляется по углу в вертикальной плоскости прихода на приемную антенну максимума сигнала цели: сигнал ПЛ в зависимости от ее глубины приходит на антенну в диапазоне вертикальных углов от -5° до +5°; сигнал надводного корабля приходит сверху либо снизу под углом более 5° [21]. Данный факт для рассматриваемых гидроакустических условий проиллюстрирован на фиг. 6, на которой для условий ДЗАО приведены зависимости углов прихода сигнала источника на приемную антенну. Из рассмотрения фиг. 6 следует, что на всех дистанциях, в том числе в районах ДЗАО, в непосредственной окрестности угла 0° по вертикали может приходить только сигнал глубоко погруженного объекта, т.е. ПЛ. В нашем случае измерение угла прихода на антенну максимума сигнала дает +1°, что свидетельствует о том, что обнаруженная цель - ПЛ.
ПРВ gH (h) глубины ПЛ в глубоком море описывается ограниченным нормальным законом с параметрами: минимальная глубина 50 м, максимальная глубина 300 м, математическое ожидание (МО) глубины 150 м, средне-квадратическое отклонение (СКО) глубины 70 м. Подставляя эту ПРВ в формулу (1), с учетом условия (2) при заданной вероятности PH=0,9, получим: Hmin=58 м, Hmax=280 м.
ПРВ приведенной шумности ПЛ на малошумной скорости хода аппроксимируется ограниченным нормальным законом с параметрами: минимальная шумность  максимальная шумность
максимальная шумность  МО
МО  СКО
СКО  В результате ПРВ
В результате ПРВ  давления ее шумоизлучения в полосе частот 2-4 кГц будет распределена также по ограниченному нормальному закону в интервале 78-93 дБ с МО 85 дБ и СКО 3 дБ. ПРВ gΔP (х) ошибки ΔР измерения давления
давления ее шумоизлучения в полосе частот 2-4 кГц будет распределена также по ограниченному нормальному закону в интервале 78-93 дБ с МО 85 дБ и СКО 3 дБ. ПРВ gΔP (х) ошибки ΔР измерения давления  сигнала цели на входе антенны аппроксимируется нормальным законом с нулевым МО и СКО 3 дБ. Вычислим для заданных гидроакустических условий передаточную характеристику канала распространения сигнала W (r).
сигнала цели на входе антенны аппроксимируется нормальным законом с нулевым МО и СКО 3 дБ. Вычислим для заданных гидроакустических условий передаточную характеристику канала распространения сигнала W (r).
Подставляя полученные зависимости в формулы (5) и (3), с учетом условия (4) при заданной вероятности PH=0,9, получим: Rmin=42 км, Rmax=54 км.
Выполняя перебор точек возможного местоположения цели в интервале [58; 280] м по глубине и в интервале [42; 54] км по дистанции, убедимся (фиг. 7), что при выборе области поиска координат шумящего объекта предложенным способом все 14 оценок координат источника шума расположились кучно вокруг фактического местоположения источника.
Таким образом, заявленный технический результат - повышение точности определения координат шумящей цели на основе информации, содержащейся в АКФ ее сигнала, - можно считать достигнутым.
Источники информации:
1. Машошин А.И. Синтез оптимального алгоритма пассивного определения дистанции до цели // Морская радиоэлектроника. 2012. №2 (40). С. 30-34.
2. Hassab I. С.Contact Localization and Motion Analysis in the Ocean Environment: a Perspective // IEEE Journal of Oceanic Engineering. 1983. Vol. OE-8, №3. P. 136-147.
3. Quazi A.H., Lerro D.T. Passive localization using time-delay estimates with sensor positional errors // JASA. 1985. Vol. 78, №5. P. 1664-1670.
4. Worthmann B.M., Song H.C., Dowling D.R. High frequency source localization in a shallow ocean sound channel using frequency difference matched field processing // Journal Acoust. Soc. Am. 2015. Vol. 138. P. 3549.
5. Орлов Е.Ф., Фокин B.H., Шаронов Г.А. Исследование параметров интерференционной модуляции широкополосного звука в глубоком океане // Акустический журнал. 1988. Т. 34, вып. 5. С. 902-907.
6. Лазарев В.А., Орлов Е.Ф., Фокин В.Н., Шаронов Г.А. Частотная зависимость параметров интерференционной модуляции широкополосного звука в мелком море // Акустический журнал. 1989. Том 35, вып. 4. С. 685-688.
7. Машошин А.И. Помехоустойчивость выделения максимумов в корреляционной функции широкополосного шумового сигнала морского объекта, обусловленных многолучевым распространением сигнала в водной среде // Акустический журнал. 2001. Том 47, №6. С. 823-829.
8. Машошин А.И. Исследование условий применимости корреляционной функции широкополосного многолучевого сигнала для оценки координат источника // Акустический журнал. 2017. Том 63, №3. С. 307-313.
9. Свидетельство о государственной регистрации программы для ЭВМ №2008612137 от 29 апреля 2008 г. «LUNA».
10. Патент РФ №2 690 223 с приоритетом от 28.08.2018 г. по заявке №2018131060. Способ определения координат морской шумящей цели.
11. Телятников В.И. Методы и устройства классификации гидроакустических сигналов // Зарубежная радиоэлектроника, 1979, №9, с. 19-38.
12. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы // СПб.: Наука, 2004.
13. Машошин А.И. Особенности синтеза алгоритмов классификации морских объектов по их гидроакустическому полю // Морская радиоэлектроника, 2009, №2 (28), с. 8-12.
14. Chen С.-Н., Lee J.-D., Lin М.-С.Classification of Underwater Signals Using Neural Networks // Tamkang Journal of Science and Engineering, 2000, vol. 3, No. 1, pp. 31-48.
15. Sutin A. etc. Stevens Passive Acoustic System for underwater surveillance // International Waterside Security Conference (WSS), 2010, Carrara.
16. Патент РФ №2681526 с приоритетом от 22.02.2018 г. по заявке №2018106745. Способ определения класса шумящей цели и дистанции до нее.
17. Патент РФ №2681432 с приоритетом от 12.04.2018 г. по заявке №2018113387. Способ определения класса шумящей цели и дистанции до нее.
18. Патент РФ №2685419 с приоритетом от 04.05.2018 г. по заявке №2018116820. Способ определения класса шумящей цели.
19. Кендал М., Стьюарт А. Статистические выводы и связи // М.: Наука, 1973.
20. Машошин А.И., Шафранюк Ю.В. Результаты сравнения алгоритмов измерения отношения сигнал/помеха на выходе двухканального шумопеленгатора // Труды XI Всероссийской конференции "Прикладные технологии гидроакустики и гидрофизики", Санкт-Петербург, Наука, 2012, с. 366-368.
21. Акустика океана под ред. Л.М. Бреховских // М.: Наука, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат морской шумящей цели | 2020 |
|
RU2740169C1 |
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| Способы определения координат морской шумящей цели | 2023 |
|
RU2812119C1 |
| Способы определения координат морской шумящей цели | 2022 |
|
RU2797161C1 |
| Способ определения координат морской шумящей цели | 2021 |
|
RU2782843C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
Изобретение относится к области гидроакустики, а именно к способам и устройствам обнаружения морских целей по их шумоизлучению, а точнее к способам определения координат целей с использованием интерференционных максимумов в автокорреляционной функции шума цели. Технический результат - повышение точности определения координат шумящей цели. Указанный технический результат достигается путем определения максимально компактной области возможного местоположения цели в пространстве «дистанция - глубина», в которой ищется такое положение источника сигнала по дистанции и глубине, для которого рассчитанные по лучевой программе интерференционные максимумы в АКФ широкополосного шума цели наилучшим образом совпадают с интерференционными максимумами в АКФ, измеренной на выходе антенны. 7 ил.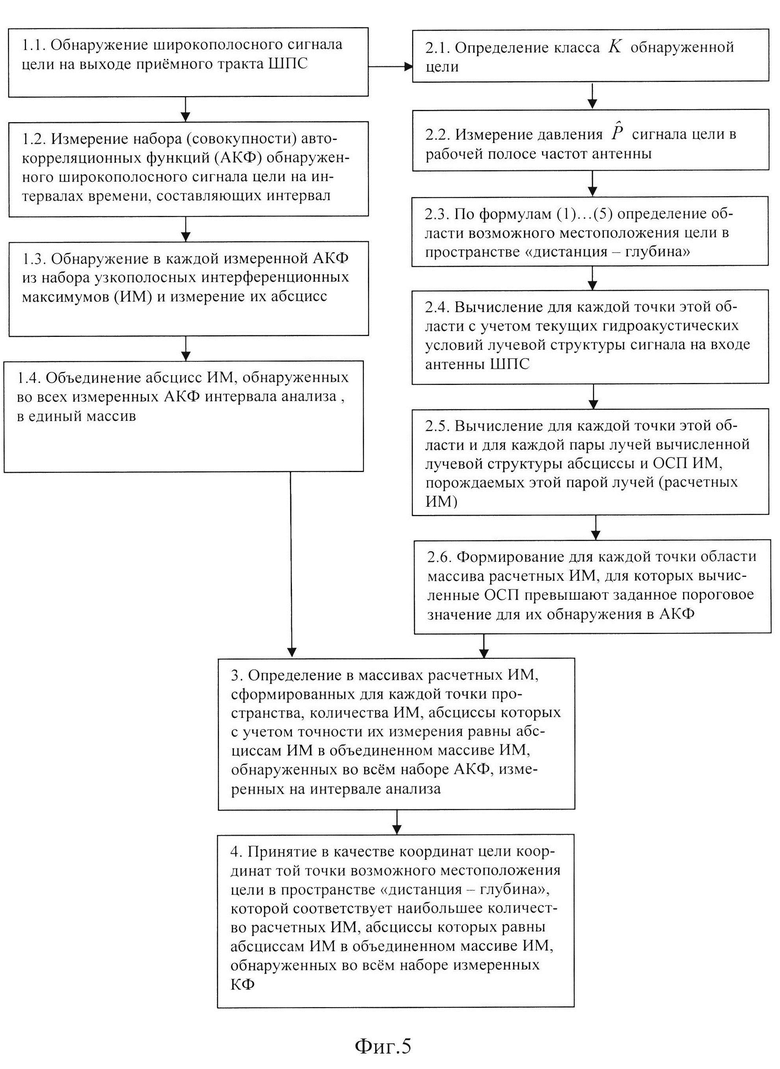
Способ определения координат морской шумящей цели, включающий обнаружение на выходе шумопеленгатора широкополосного сигнала цели, измерение на каждом из ряда последовательных интервалов времени его автокорреляционной функции (АКФ), обнаружение в каждой измеренной АКФ узкополосных интерференционных максимумов (ИМ), измерение их абсцисс, объединение в единый массив всех ИМ, обнаруженных в АКФ на ряде последовательных интервалов времени, перебор точек возможного местоположения цели в пространстве «дистанция - глубина», вычисление для каждой точки с учетом текущих гидроакустических условий лучевой структуры сигнала на входе гидроакустической антенны шумопеленгатора, вычисление для каждой возможной пары лучей вычисленной лучевой структуры абсциссы и отношения сигнал/помеха расчетного ИМ, который образуется в АКФ этой парой лучей, формирование для всех пар лучей массива расчетных ИМ, вычисленные отношения сигнал/помеха которых превышают заданное пороговое значение для их обнаружения в АКФ, определение в сформированном массиве количества ИМ, абсциссы которых с учетом точности их измерения равны абсциссам ИМ в объединенном массиве всех ИМ, обнаруженных в АКФ на ряде последовательных интервалов времени, принятие в качестве координат цели координаты той точки в пространстве «дистанция - глубина» возможного местоположения цели, которой соответствует наибольшее количество ИМ, абсциссы которых равны абсциссам ИМ, обнаруженных в объединенном массиве всех ИМ, обнаруженных в АКФ на ряде последовательных интервалов времени, отличающийся тем, что дополнительно измеряют давление  сигнала морской шумящей цели на входе антенны, определяют класс K морской шумящей цели, определяют минимальную Hmin и максимальную Hmax глубину нахождения морской шумящей цели путем решения относительно Hmjn и Hmax уравнения
сигнала морской шумящей цели на входе антенны, определяют класс K морской шумящей цели, определяют минимальную Hmin и максимальную Hmax глубину нахождения морской шумящей цели путем решения относительно Hmjn и Hmax уравнения
при условии  ,
,
где
gH (h) - плотность распределения вероятностей (ПРВ) глубины морской шумящей цели класса K,
PH - заданная вероятность попадания фактической глубины морской шумящей цели в интервал [Hmin, Hmax],
определяют минимальную Rmin и максимальную Rmax дистанции нахождения морской шумящей цели путем решения относительно Rmin и Rmax уравнения
при условии
 ,
,
где
 - условная (в зависимости от давления
- условная (в зависимости от давления  сигнала на входе приемной антенны) ПРВ дистанции R до морской шумящей цели, вычисляемая по формуле
сигнала на входе приемной антенны) ПРВ дистанции R до морской шумящей цели, вычисляемая по формуле
 ,
,
r, r' - аргументы ПРВ дистанции R;
gΔƒ(p) - ПРВ давления шума морской шумящей цели класса K в рабочем диапазоне частот приемной антенны на расстоянии 1 м от источника,
W(r) - передаточная характеристика канала распространения сигнала, вычисленная для текущих гидроакустических условий,
gΔP(x) - ПРВ ошибки ΔP измерения давления сигнала в рабочем диапазоне частот приемной антенны,
PR - заданная вероятность попадания фактической дистанции до морской шумящей цели в интервал [Rmin, Rmax],
перебор точек возможного местоположения цели в пространстве «дистанция - глубина» выполняют в интервале [Hmin, Hmax] по глубине и в интервале [Rmin, Rmax] по дистанции.
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| Способ классификации морских объектов на основе весовых коэффициентов их классификационных признаков | 2018 |
|
RU2687994C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681432C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2017 |
|
RU2680860C1 |
| Способ определения местоположения объектов гидроакустической пассивной системой в условиях многомодового распространения звука | 2017 |
|
RU2667330C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2650830C1 |
| CN 101852854 A, 06.10.2010. | |||

