Изобретение относится к области гидроакустических измерений и может быть использовано для измерения дистанционным акустическим способом вертикального распределения скорости звука в естественных водоемах.
Известны дистанционные акустические способы измерения вертикального распределения скорости звука в естественных водоемах. Так в способе, на основе которого выполнены устройства по патенту [1], производят излучение в море в сторону дна акустических импульсных гармонических сигналов. Вертикальная характеристика направленности (ХН) акустического источника пересекается с веером лепестков ХН акустической приемной системы. К приемной системе распространяются акустические сигналы, рассеянные от акустических рассеивателей, находящихся в объемах водной среды, ограниченных лепестками характеристик направленности (ХНХН) источника и приемника акустических колебаний. По измеренным значениям скорости звука на горизонте источника и приемника акустических колебаний, временам распространения акустических сигналов от источника до соответствующих рассеивателей и к акустической приемной системе, углам наклона лепестков ХН акустической приемной системы и известному расстоянию между расположенными на одном горизонте акустическим источником и приемной системой находят горизонты рассеивателей и значения скорости звука на них.
Причинами, препятствующими достижению технического результата, являются низкая точность, обусловленная случайным, неконтролируемым положением акустических рассеивателей в объемах водной среды, ограниченных лепестками ХНХН источника и приемной системы, а также невозможность проведения измерений на ходу носителя аппаратуры из-за сильного влияния эффекта Доплера, который имеет место при распространении акустических сигналов по наклонным траекториям лепестков веера ХН акустической приемной системы.
В способе, на основе которого выполнено устройство по патенту [2], производят излучение в море акустического импульсного сигнала с внутренней частотной модуляцией несущих колебаний. Акустический импульс, распространяясь в сторону дна, рассеивается на различных неоднородностях водной среды. Рассеянный акустический сигнал принимается акустической приемной системой, содержащей два акустических приемника, расположенных на фиксированных расстояниях от акустического источника. Они через смеситель подключены к спектроанализатору. По результатам обработки принятых сигналов на спектроанализаторе определяются углы и времена прихода этих сигналов. По их значениям и по известным значениям расстояний между излучателем и акустическими приемниками вычислительное устройство находит вертикальное распределение скорости звука в море.
Причиной, препятствующей достижению технического результата, является использование большого количества мелких относительно длины акустической волны естественных акустических рассеивателей (в море - преимущественно зоопланктона) в каждом из объемов жидкой среды, ограниченных характеристиками направленности акустического источника и приемной системы, которых требуемого количества может не быть, а также невозможность проведения измерений на ходу носителя аппаратуры из-за сильного влияния эффекта Доплера, который имеет место при распространении акустических сигналов по наклонным траекториям ХН акустической приемной системы.
Наиболее близким по совокупности признаков и технической сущности к предлагаемому изобретению является способ измерения распределения скорости звука в жидкой среде, на основе которого выполнено устройство по авторскому свидетельству [3].
Акустический сигнал излучается приемоизлучателем. Отраженные от границ акустически неоднородных слоев жидкой среды акустические сигналы принимаются приемоизлучателем и двумя акустическими приемниками. Акустический приемоизлучатель и акустические приемники располагаются на одном горизонте. По измеренным значениям времен распространения акустических сигналов от источника звука до границ акустически неоднородных слоев водной среды и от них до акустических приемников (временам прихода принятых сигналов), скорости звука на горизонте акустических источника и приемников, известным расстояниям между ними находят распределение по глубине скорости звука в жидкой среде. Для повышения точности определения ВРСЗ на ходу судна дополнительно производят корректировку значений углов прихода принятых сигналов и эффективной длины расстояний от акустического источника до приемников.
Причинами, препятствующими достижению технического результата, являются использование в качестве рассеивателей параллельных водной поверхности границ акустически неоднородных слоев жидкой среды, которых для выполнения достоверных измерений в естественных водоемах необходимого количества (~20 слоев) по глубине никогда нет, что приводит к некорректности учета влияния хода судна-носителя на показания аппаратуры посредством предлагаемой корректировки значений углов прихода принятых сигналов и эффективной длины расстояний от акустического источника до приемников.
Технический результат, который может быть получен при осуществлении изобретения, состоит в повышении точности и глубины измерения скорости звука на заданных горизонтах в естественных водоемах дистанционным акустическим способом на ходу носителя аппаратуры.
Для достижения технического результата в предлагаемом способе измерения скорости звука в воде облучают импульсным акустическим сигналом одиночный относительно сильный естественный акустический рассеиватель, находящийся в водном объеме, ограниченным характеристиками направленности акустического излучателя-приемника и двух акустических приемников, причем оси характеристик направленности первого и второго акустического приемников пересекаются на одном горизонте с осью характеристики направленности акустического излучателя-приемника, последовательно изменяют углы наклона характеристик направленности первого и второго акустического приемников, а углы прихода принятых акустических сигналов определяют по их временам прихода до излучателя-приемника и обоих приемников.
В частности, излучают монохроматический (с гармоническим заполнением) импульсный акустический сигнал малой длительности.
В частности, излучают сложный импульсный акустический сигнал с внутренней гиперболической частотной модуляцией несущих колебаний, а времена прихода принятых сигналов определяют по временному положению максимумов взаимнокорреляционных функций излучаемого и принятых сигналов.
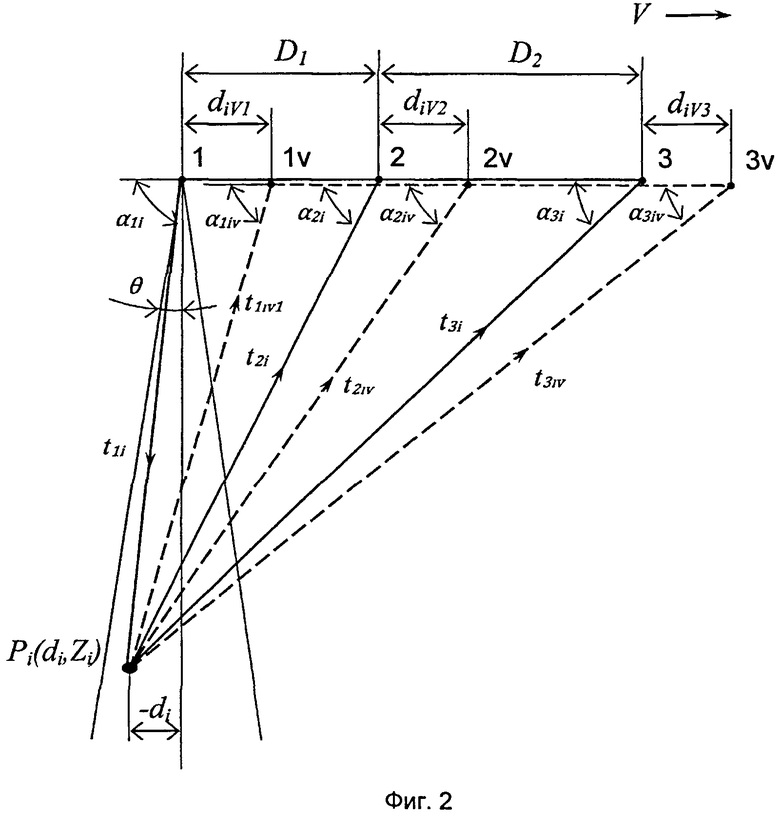
Сущность изобретения поясняется фигурами 1 и 2. На фиг.1 представлена структурная схема устройства для осуществления предлагаемого способа. На фиг.2 показана геометрия акустического зондирования водной среды.
Устройство (фиг.1) содержит: направленный акустический излучатель-приемник 1, первый 2 и второй 3 направленные акустические приемники, импульсно-модулированный генератор 4, ключ «прием-передача» 5, усилители принятых сигналов 6, четырехканальный аналого-цифровой преобразователь 7, вычислительное устройство 8 и контактный измеритель скорости звука 9. Остальные обозначения далее в тексте.
На фиг.2 при измерениях на стопе судна показаны: цифрами 1, 2 и 3 - положение акустического излучателя-приемника и приемников, сплошными линиями с направляющими стрелками - траектории распространения акустических сигналов, α1i, α2i и α3i, а также t1i, t2i и t3i - углы прихода и времена распространения от рассеивателя Pi(di,Zi) принятых сигналов, расположенного на расстоянии - di от оси ХН излучателя. При измерениях на ходу судна представлены: цифрами 1v, 2v и 3v - положение акустического излучателя-приемника 1 и приемников 2 и 3 в моменты приема ими акустических сигналов, штриховыми линиями с направляющими стрелками - траектории распространения акустических сигналов распространения от рассеивателя Pi(di,Zi) до соответствующих приемников. Обозначения α1iv, α2iv и α3iv, а также t1iv1, t2iv и t3iv - углы прихода и времена распространения от рассеивателя Pi(di,Zi) принятых сигналов. Остальные обозначения далее в тексте.
Суть предложенного способа заключается в следующем.
С выхода импульсно-модулированного генератора 4 (фиг.1) электрический сигнал через ключ «прием-передача» 5 возбуждает направленный акустический обратимый преобразователь 1, функционирующий как излучатель-приемник. Соответствующий акустический сигнал, распространяясь по вертикали в водной среде, рассеивается от относительно сильного естественного рассеивателя Pi(di,Zi), например рыбки, размеры которого l больше длины волны λ излучаемого акустического сигнала l>λ. Рассеянные акустические сигналы достигают при скорости судна V=0 излучателя-приемника 1 и установленных на одном горизонте с ним на фиксированных расстояниях D1 и D1+D2 от него акустических приемников 2 и 3, оси характеристик направленности которых имеют углы наклона αo2i и αo3i. В процессе измерения скорости звука в естественном водоеме (в море) на заданных горизонтах значения углов наклона ХНХН приемников последовательно изменяют в пределах 0<αo2<π/2 и 0<αo3<π/2. Времена прихода принятых сигналов при скорости судна V (фиг.2), то есть времена распространения их от акустического излучателя-приемника 1 до рассеивателя Pi(di,Zi) и от него к акустическим приемникам 2 и 3 в точках 2v и 3v, а также обратно к излучателю-приемнику 1 в точке 1v, соответственно равны T2iV, T3iV и T1iV:



Здесь V1i1=V·cosα1i, V1i2=V·cosα1iv, V2i=V·cosα2iv и V3i=V·cosα3iv - проекции скорости перемещения судна, на путь распространения акустического сигнала до соответствующего акустического приемника;
C - скорость звука в воде.
Электрические принятые сигналы (фиг.1) с выходов приемников 2 и 3 через усилители 6, а также с выхода излучателя-приемника 1 через ключ «прием-передача» 5 и усилители 6, поступают на четырехканальный аналого-цифровой преобразователь 7, выходы которого подключены к вычислительному устройству 8. Последнее определяет времена прихода принятых сигналов T1iV, T2iV и T3iV, вычисляет по их значениями, значению скорости звука C0 на горизонте акустических приемников, измеренному контактным измерителем скорости звука 9, значениям скорости судна V и расстояниям D1, D2 углы прихода принятых сигналов α2iv и α3iv по формулам
α2iv=2·arctg(A-1·B·P)0.5, α3iv=2·arctg(A·B·P-1)0.5,



Здесь t1iv, t2iv и t3iv - расчетное время распространения акустического сигнала от i-го рассеивателя соответственно до первой 1v, второй 2v и третьей 3v точки приема при скорости судна V, t1iv=0.5·T1iV, t2iv=T2iV-t1iv, t3iv=T3iV-t1iv; D1iV=D1-d1iV+d2iV, D2iV=D-d2iV+d3iV - эффективное расстояние соответственно от приемоизлучателя 1 в точке 1v до приемника 2 в точке 2v и от приемника 2 в точке 2v до приемника 3 в точке 3v в моменты приема ими акустических сигналов при скорости судна V;
d1iV=V·T1iV, d2iV=V·T2iV и d3iV=V·T3iV - смещение за соответствующее время прихода приемоизлучателя 1 из точки 1 в точку 1v, а также приемника 2 в точку 2v и приемника 3 в точку 3v.
В процессе измерений производится запоминание найденных значений времен tjiv(αjiv) и углов αjiv прихода принятых сигналов, для всех углов αoji наклона ХН акустических приемников (j=2 и 3). После чего вычислительным устройством 8 определяются значения скорости звука в воде на заданных горизонтах, то есть распределение скорости звука по глубине С (Z) по известным соотношениям [4]

где


t(α)=t(α1iv)+t(α2iv);


Абсолютные погрешности расчета углов прихода принятых акустических сигналов α2iv и α3iv к точкам приема 2v и 3v при скорости хода судна V равны Δα2iv=α2iv-α2i и Δα3iv=α3iv-α3i.
Абсолютные погрешности расчета времен распространения акустических сигналов от i-го рассеивателя t2iv и t3iv к точкам приема 2v и 3v при скорости хода судна V равны Δt2iv=t2iv-t2i и Δt3iv=t3iv-t3i.
Для удовлетворительного восстановления искомого распределения скорости звука в воде по глубине C(Z) при проведении измерений на ходу судна необходимо, чтобы значения Δtjiv<5·10-4 с [5]. В предлагаемом способе измерения скорости звука в воде это условие соблюдается. Так, при D1=25 м, D2=50 м, V≈5 м/с, постоянной по глубине скорости звука в море C≈1500 м/с и для наихудшего случая расположения акустического рассеивателя Pi(di,Zi) на расстоянии dim=-Zi·tgθ от оси характеристики напрвленности излучателя, имеющей, как и у акустических приемников, ширину раствора 2θ≈3°, получаем для Zi≈150 м значения абсолютных погрешностей Δt2iv≈8·10-5 с и Δt3iv≈1,9·10-4 с, при этом Δα2iv≈0,4° и Δα3iv≈0,3°.
У дистанционного устройства-прототипа с акустическим излучателем-приемником и одной акустической приемной системой из двух приемников [3] (прямоугольная схема зондирования) при тех же самых исходных данных для Zi≈150 м имеем значения абсолютных погрешностей Δt2iv≈6·10-4 с и Δt3iv≈1,5·10-3 с, то есть значительно больше, чем в предлагаемом способе. При этом дополнительно имеет место неконтролируемые изменения углов прихода до Δαjiv≈±1,5°. Эти обстоятельства исключают возможность измерения с большой точностью в естественных водоемах (в море) скорости звука на заданных горизонтах на ходу судна дистанционным устройством-прототипом.
Наиболее часто встречающиеся в естественных водоемах акустические рассеиватели - мелкие рыбы и ракообразные, которые могут быть использованы в дистанционной аппаратуре измерения скорости звука, являются слабыми отражателями акустических сигналов. В предлагаемом способе акустические приемники являются направленными, что позволяет измерять значения скорости звука в водоемах относительно простыми дистанционными устройствами на глубинах примерно до 100 м посредством излучения импульсных монохроматических (с гармонической несущей) малой длительности акустических сигналов.
Для зондирования естественных рассеивателей на значительных (более 100 м) глубинах, необходимо излучать сложный импульсный акустический сигнал, у которого τ·Δf□1, где τ - длительность, а Δf - ширина спектра сигнала. При этом значения времен прихода определяются по временному положению максимумов взаимнокорреляционных функций излучаемого и принятых сигналов. В предлагаемом способе для увеличения глубины зондирования излучают сложный акустический сигнал с внутренней гиперболической частотной модуляцией (ГЧМ) несущих колебаний, так как все остальные известные сложные акустические сигналы при наличии эффекта Доплера настолько сильно изменяют при распространении в водной среде свой спектральный состав, что не могут быть использованы для взаимнокорреляционной обработки. У сложного сигнала с ГЧМ мгновенная частота определяется соотношением [6]
f=f0/(1-k·t),
где f0 - начальная частота при f=0, k - параметр, характеризующий крутизну модулирующей функции.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ИСТОЧНИКОВ
1. Patent 3388372 USA. Cl. 340-3. Determination of ocean sound velocity profiles / De Witz G.H. Filed 22.05.67. Publ. 11.06.68.
2. А.с. 1675687 СССР. G01H 5/00. 22.08.89. Устройство для измерения вертикального распределения скорости звука в жидких средах / Бравичев А.С. Опубл. 07.09.91. Бюл. изобр. №33.
3. А.с. 1585691 СССР. G01H 5/00. 22.04.88. Устройство для измерения вертикального распределения скорости звука в жидких средах / Наговицин В.А., Сысоев А.Г, Денисов А.Н., Фороща Е.С. Опубл. 15.08.90. Бюл. изобр. №30.
4. Осташев В.Е. О возможности восстановления вертикальных профилей скорости звука в бистатической схеме акустического зонирования атмосферы и океана // Известия АН СССР. Физика атмосферы и океана. 1984. Т.20. №2. С.199-203.
5. Бухгейм А.Л., Зенкова Н.П. О дистанционном определении характеристик слоистых сред // Геология и геофизика. 1981. №7. С.81-88.
6. Зарайский В.А., Тюрин A.M. Теория гидролокации. Л.: ВМОЛУА. 1975. 604 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКОЙ СРЕДЕ | 2010 |
|
RU2456554C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2042152C1 |
| Способ измерения вертикального распределения скорости звука в воде | 2015 |
|
RU2613485C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2037847C1 |
| Способ измерения распределения скорости звука в жидких средах | 2014 |
|
RU2626579C2 |
| ФАЗОВЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2012 |
|
RU2510045C2 |
| Корреляционный способ измерения параметров тонкой структуры водной среды | 2022 |
|
RU2799974C1 |
| СПОСОБ И УСТРОЙСТВО БЫСТРОГО ВЫЧИСЛЕНИЯ ФУНКЦИИ НЕОПРЕДЕЛЕННОСТИ СИГНАЛА С УЧЕТОМ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ | 2009 |
|
RU2487367C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК ПО ГОРИЗОНТАЛЬНОМУ И ВЕРТИКАЛЬНОМУ УГЛУ | 2011 |
|
RU2492498C2 |
| Способ обнаружения звукорассеивающих слоев в морях и океанах | 2023 |
|
RU2813634C1 |
Изобретение относится к области гидроакустических измерений и может быть использовано для измерения вертикального распределения скорости звука в естественных водоемах. Сущность: производят зондирование акустическим импульсным сигналом одиночного относительно сильного естественного акустического рассеивателя, находящегося в водном объеме, ограниченным характеристиками направленности акустических излучателя-приемника и двух приемников, оси характеристик направленности которых пересекаются на одном горизонте с осью характеристики направленности акустического излучателя-приемника. Последовательно изменяют углы наклона характеристик направленности первого и второго акустического приемников, которые расположены на фиксированных расстояниях от излучателя-приемника на одном горизонте с ним. Измеряют времена прихода принятых сигналов, определяют по их значениям, значению скорости звука на горизонте акустических источника и приемников, известным расстояниям между ними значения скорости звука в водоеме на заданных горизонтах. Излучают или монохроматический импульсный акустический сигнал малой длительности, или сложный импульсный акустический сигнал с гиперболической частотной модуляцией, при использовании которой времена прихода принятых сигналов определяют по временному положению максимумов взаимнокорреляционных функций излучаемого и принятых сигналов. Технический результат - повышение точности и глубины измерения скорости звука на заданных горизонтах в естественных водоемах дистанционным акустическим способом на ходу носителя аппаратуры. 2 з.п. ф-лы, 2 ил.
1. Способ измерения скорости звука в воде, заключающийся в зондировании акустическим сигналом акустических рассеивателей, приеме рассеянных обратно от них акустических сигналов первым, вторым акустическими приемниками и установленным на одном горизонте с ними направленным акустическим излучателем-приемником, измерении времен прихода принятых сигналов, определении по их значениям, значению скорости звука на горизонте акустических источника и приемников, известным расстояниям между ними, а также углам прихода принятых сигналов скорости звука в воде на заданных горизонтах, отличающийся тем, что облучают импульсным акустическим сигналом одиночный относительно сильный естественный акустический рассеиватель, находящийся в водном объеме, ограниченным характеристиками направленности акустических излучателя-приемника, первого и второго акустического приемников, причем оси характеристик направленности приемников пересекаются на одном горизонте с осью характеристики направленности акустического излучателя-приемника, при этом последовательно изменяют углы наклона характеристик направленности первого и второго акустического приемников, а углы прихода принятых акустических сигналов определяют по их временам прихода до излучателя-приемника и обоих приемников.
2. Способ по п.1, отличающийся тем, что излучают монохроматический импульсный акустический сигнал малой длительности.
3. Способ по п.1, отличающийся тем, что излучают сложный импульсный акустический сигнал с внутренней гиперболической частотной модуляцией несущих колебаний, а времена прихода принятых сигналов определяют по временному положению максимумов взаимнокорреляционных функций излучаемого и принятых сигналов.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКИХ СРЕДАХ | 2010 |
|
RU2436050C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ЗВУКА В МОРСКОЙ ВОДЕ НА БОЛЬШИХ ГЛУБИНАХ С ПОДВОДНОГО НОСИТЕЛЯ | 2006 |
|
RU2313769C1 |
| Устройство для измерения вертикального распределения скорости звука в жидких средах | 1989 |
|
SU1675687A1 |
| US6577557 B1, 10.06.2003 | |||
| US6388948 B1, 14.05.2002 | |||
| US2008279045 A1, 13.11.2008 | |||
| US2871460 A, 27.01.1959 | |||

