Ключевые слова
Опора, водило, центральное водило, планетарное водило, вал, планетарный вал, сателлитный вал, солнечная шестерня, планетарная шестерня, солнечно-планетарная шестерня, сателлитно-планетарная шестерня, сателлитная шестерня, шестерня, цилиндрическая шестерня, коническая шестерня, наружная шестерня, внутренняя шестерня, количество зубьев, вращение, бесконечное вращение, независимое вращение, «условие независимости», планетарный механизм, «эпипланетарный» механизм, комбинированной планетарный механизм, «элеутерострофный» механизм, «элеутеростроф».
Область техники, к которой относится изобретение
Настоящее изобретение относится к чисто механическому устройству, передающему бесконечное вращение от ведущего вала на неподвижной опоре ведомому валу на бесконечно вращающемся водиле, или наоборот, независимо от вращения водила.
Решаемая техническая проблема
Во многих применениях, специализированных или нет, существует необходимость передачи бесконечного вращения от ведущего вала на неподвижной опоре к ведомому валу на вращающемся водиле, или наоборот, без влияния бесконечного вращения водила на эту передачу.
Таким примером является ветровая турбина с горизонтальной осью, горизонтальный вал пропеллера которой опирается на водило, называемое «гондолой», которое вращается вокруг вертикальной оси, и поэтому любой обычный способ передачи от горизонтальной оси к вертикальной оси на опоре, которая неподвижна относительно земли, приводит к недопустимому присутствию - в некоторой степени - угловой скорости гондолы в окончательно полученной угловой скорости последнего элемента этой силовой передачи.
Конечно, это одновременно приводит к наличию на гондоле крутящего момента, что напрямую связано с передаваемым крутящим моментом вала пропеллера; необходимо прилагать к гондоле крутящий момент, чтобы всегда ориентировать ее в оптимальном рабочем положении для совершения работы, но этот ориентирующий крутящий момент не должен иметь ничего общего с крутящим моментом, передаваемым от вала пропеллера к неподвижной опоре.
Другими примерами являются передача вращения между шасси большого экскаватора или боевого танка и их бесконечно вращающейся башней или между шасси транспортного средства и его ведущим колесом, которое установлено на, возможно, бесконечно вращающемся рулевом кронштейне.
Другим таким примером является механизм регулировки шага винта для винтового воздушного судна, вертолета, водного судна с гребным винтом или ветровой турбины, хотя существующие механизмы для этих применений имеют удовлетворительные характеристики, поскольку требуемое движение является конечным, а не бесконечным.
Однако, есть много других примеров, которые требуют независимой бесконечной вращательной передачи валу на бесконечно вращающемся водиле.
Таким образом, цель заключается в создании чисто механического механизма, который выполняет передачу бесконечного вращения от ведущего вала на неподвижной опоре к ведомому валу на бесконечно вращающемся водиле или наоборот, независимо от вращения водила, с минимально возможным количеством движущихся частей и максимально возможной степенью эффективности.
Уровень техники
Наиболее известным - и в то же время наиболее иллюстративным - способом передачи движения, в общем, с помощью чисто механических средств, к элементу на бесконечно вращающемся водиле, независимо от вращения водила, является способ регулировки шага винта в вертолете:
на опорной конструкции вертолета один конец первого стержня перемещается линейно в некотором направлении, в результате чего перемещается, также линейно, другой конец этого стержня в направлении, перпендикулярном предыдущему, причем это направление совпадает с осью вращения вращающейся втулки винта, и от этой точки, через осевые упорные подшипники, это движение передается - независимо от бесконечного вращения втулки винта относительно опорной конструкции вертолета - на одном конце второго стержня, рабочая плоскость которого жестко лежит на втулке винта, и при этом другой конец этого стержня окончательно выполняет регулировку шага винта, независимо от бесконечного вращения втулки винта относительно опорной конструкции вертолета.
Таким образом, если первый конец первого стержня аналогичного механизма, приводится в движение коленчатым валом, который бесконечно вращается на неподвижной опорной конструкции этого механизма, а второй конец второго стержня приводит в движение другой коленчатый вал, который бесконечно вращается на также бесконечно вращающемся водиле этого механизма, обеспечивается передача бесконечного вращения от приводного вала на неподвижной опорной конструкции к ведомому валу на бесконечно вращающемся водиле, независимо от вращения водила.
Однако два преобразования бесконечного вращательного движения в возвратно-поступательное линейное движение и наоборот, а также осевая тяга через осевые упорные подшипники, являются процессами, которые требуют многих движущихся частей в негибкой и довольно громоздкой компоновке, и, конечно, общая степень эффективности оказывается значительно низкой, кроме того, при этом существуют проблемные точки - обычно называемые «мертвыми точками» -мгновенной неопределенности направления движения при преобразовании возвратно-поступательного линейного движения в бесконечное вращательное движение.
Такая методика раскрыта - фактически она применяется к ветровой турбине - в патентной заявке TWI572779.
В патентных заявках ES2273609 и CN102691629 есть попытки передачи вращения от гондолы к основанию мачты через конические шестерни и два коаксиальных вертикальных вала или один, соответственно.
В патентной заявке JP3157729 предложена гондола, жестко соединенная с вращающейся мачтой.
Что касается других заявок, кроме ветровых турбин, то, возможно, нет никакого соответствующего предложения, а патентные заявки, такие как DE202005016021 и CN105848836, далеки от идеи настоящего изобретения и не решают напрямую и эффективно задачу независимой передачи с вышеуказанными требованиями.
Таким образом, видимо, в уровне техники, за исключением вышеописанного способа, не существует другого подобного предложения о достижении только с помощью чисто механических средств требуемой передачи независимо от вращения водила.
Раскрытие сущности изобретения
Чтобы напрямую решить вышеуказанные задачи, используя чисто механические средства, необходимо каким-то образом убрать воздействия, кинематические и динамические, бесконечного вращения водила на передаваемое вращение.
Итак, предложен комбинированный планетарный механизм, планетарные шестерни которого принадлежат другому планетарному механизму, который поэтому можно назвать «эксцентрическим планетарным механизмом», а этот комбинированный планетарный механизм можно назвать «эпипланетарным механизмом», в том смысле, что эта конфигурация является механизмом на механизме.
Эксцентрический планетарный механизм может представлять собой любой механический узел с тремя портами, входами или выходами, такой как классический дифференциальный механизм транспортного средства, где одним входом этого механизма является основное вращение, подлежащее передаче, но смешанное с -некоторым образом - нежелательным бесконечным вращением водила с положительным знаком, другим входом является это нежелательное бесконечное вращение водила с отрицательным знаком, тогда как его выход является отфильтрованным конечным бесконечным вращением, непосредственно относящимся только к начальному основному вращению.
Комбинированный планетарный механизм обычно имеет опору и первое водило, которое является уже существующим и вращается с нежелательным бесконечным вращением относительно опоры, первую шестерню, которая является коаксиальной с первым водилом и жестко соединена с опорой, вторую шестерню, которая является также является коаксиальной с первым водилом и свободно и бесконечно вращается, образуя либо вход, либо выход комбинированного планетарного механизма, а также имеет на первом водиле, эксцентрически и, предпочтительно, параллельно его оси, один или более эксцентрических планетарных механизмов.
Каждый эксцентрический планетарный механизм, в общем, имеет второе водило, на котором эксцентрически и, предпочтительно, параллельно его оси находится одна или более осей, вокруг которой вращается первый вал с третьей шестерней и четвертой шестерней, жестко соединенными с обоими его концами, при этом на одной стороне второго водила, коаксиально с ним, свободно и бесконечно вращается второй вал с жестко соединенными с обоими его концами пятой и шестой шестернями, взаимодействующими с первой шестерней и третьей шестерней, соответственно, при этом на другой стороне второго водила, коаксиально с ним, также свободно и бесконечно вращается третий вал с жестко соединенными с его концами седьмой шестерней и восьмой шестерней, взаимодействующими со второй шестерней и четвертой шестерней, соответственно.
В зависимости от конструкции либо второе водило, либо третий вал образуют либо выход, либо вход комбинированного планетарного механизма, инверсивно в зависимости от роли второй шестерни.
Комбинированной планетарный механизм, в целом, выполнен таким образом, что поток мощности, от его входа к его выходу, осуществляется независимо, кинематически и динамически, от вращения уже существующего водила, и с этой целью существует математическое соотношение между количеством зубьев всех задействованных шестерен, которое предлагается назвать «условием независимости».
Поскольку видно, что этот механизм представляет собой действительно новую конфигурацию, решающую несколько важных задач, вместо его длинного названия-описания «механизм передачи бесконечного вращения валу на бесконечно вращающемся водиле независимо от вращения водила», предлагается назвать его «элеутерострофным (Eleuthero-Strophic) механизмом», что означает механизм с независимым вращением, или даже «элеутерострофом (Eleuthero-Strophe)», что означает независимо вращающуюся втулку; термин «элеутерос (Eleutheros)» уже используется в английском языке, в истории, антропологии и ботанике, но не в технике, поэтому отсутствует возможность какой-либо путаницы с другим значением, похожим или нет.
Наконец, рассматривая этот вопрос в более широкой перспективе, следует отметить, что механизм передачи бесконечного вращения валу на бесконечно вращающемся водиле независимо от вращения водила, или элеутеростроф, хотя и радикально отличается (в частности, в настоящем изобретении амплитуда вовлеченного колебания равна только нулю) от предыдущих случаев WO/2007/125373, WO/2009/040588, WO/2018/020279 и PCT/GR2021/000012 (где также амплитуда вовлеченного колебания равна только нулю), подпадает под широко определенную категорию под названием: «РАСПРЕДЕЛЕННАЯ КОЛЕБАТЕЛЬНАЯ ПЕРЕДАЧА» (DOT, от англ. DISTRIBUTIVE OSCILLATING TRANSMISSION,).
Краткое описание чертежей
Ниже приведено исчерпывающее представление комбинированного планетарного механизма.
На чертежах первых шести фигур наиболее важные элементы обозначены следующим образом:
00 - опора,
10 - центральное водило,
20 - планетарное водило,
23 - планетарный реактивный вал,
45 - сателлитный вал,
67 - планетарный активный вал,
S1 - цилиндрическая наружная реактивная солнечная шестерня,
I1 - цилиндрическая внутренняя реактивная солнечная шестерня,
S2 - цилиндрическая реактивная солнечно-планетарная шестерня,
S3 - цилиндрическая реактивная сателлитно-планетарная шестерня,
В3 - коническая реактивная сателлитно-планетарная шестерня,
S4 - цилиндрическая реактивная сателлитная шестерня,
В4 - коническая реактивная сателлитная шестерня,
S5 - цилиндрическая активная сателлитная шестерня,
В5 - коническая активная сателлитная шестерня,
S6 - цилиндрическая активная сателлитно-планетарная шестерня,
В6 - коническая активная сателлитно-планетарная шестерня,
S7 - цилиндрическая активная солнечно-планетарная шестерня,
S8 - цилиндрическая наружная активная солнечная шестерня,
I8 - цилиндрическая внутренняя активная солнечная шестерня.
Примечания:
- восемь задействованных шестерен являются либо цилиндрическими, либо коническими, прямозубыми или косозубыми, и, наконец, либо наружными, либо внутренними, если тип шестерни не указан иначе, поэтому они отличаются буквой, которой является либо «S» для цилиндрической шестерни, либо «В» для конической шестерни, либо «I» для внутренней шестерни,
- в дополнение к этим обозначениям, элементу, отвечающему входу или выходу механизма, предшествует обозначение «I/O», тогда как другому элементу, который - инверсно, в зависимости от роли указанного элемента, отвечает выходу или входу механизма, предшествует обозначение «О/I». На чертежах представлены:
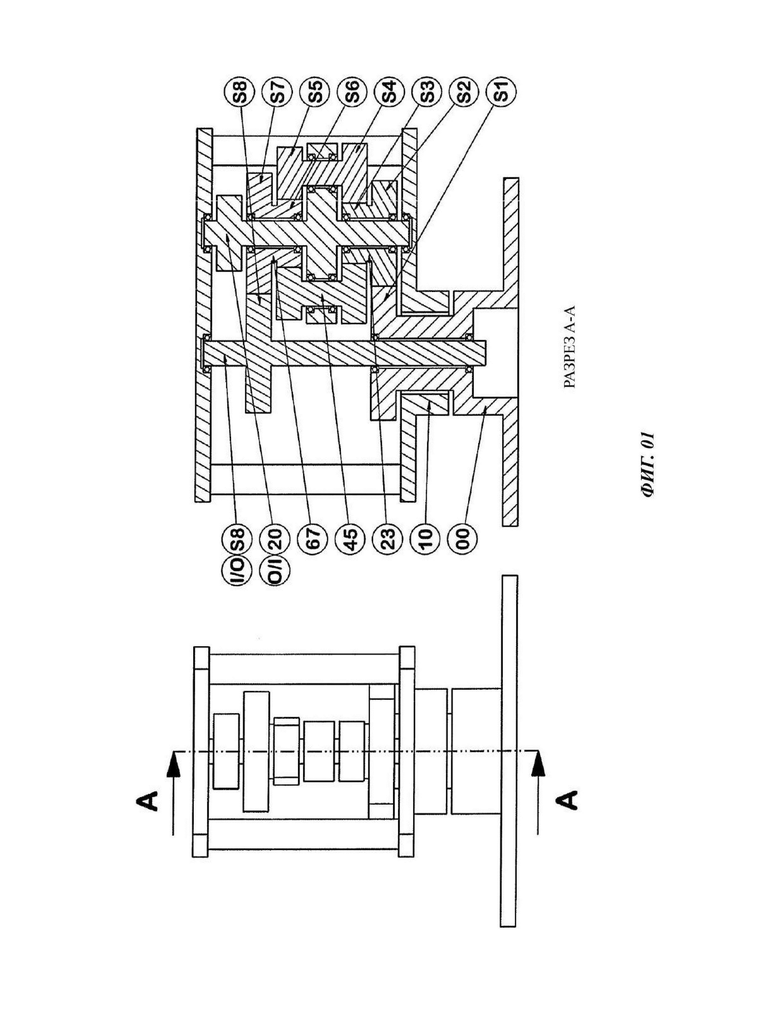
На фиг. 01: вид сбоку и меридианный разрез А-А механизма с исключительно цилиндрическими шестернями.
На фиг. 02: вид сбоку и меридианный разрез В-В механизма с цилиндрическими и коническими шестернями.
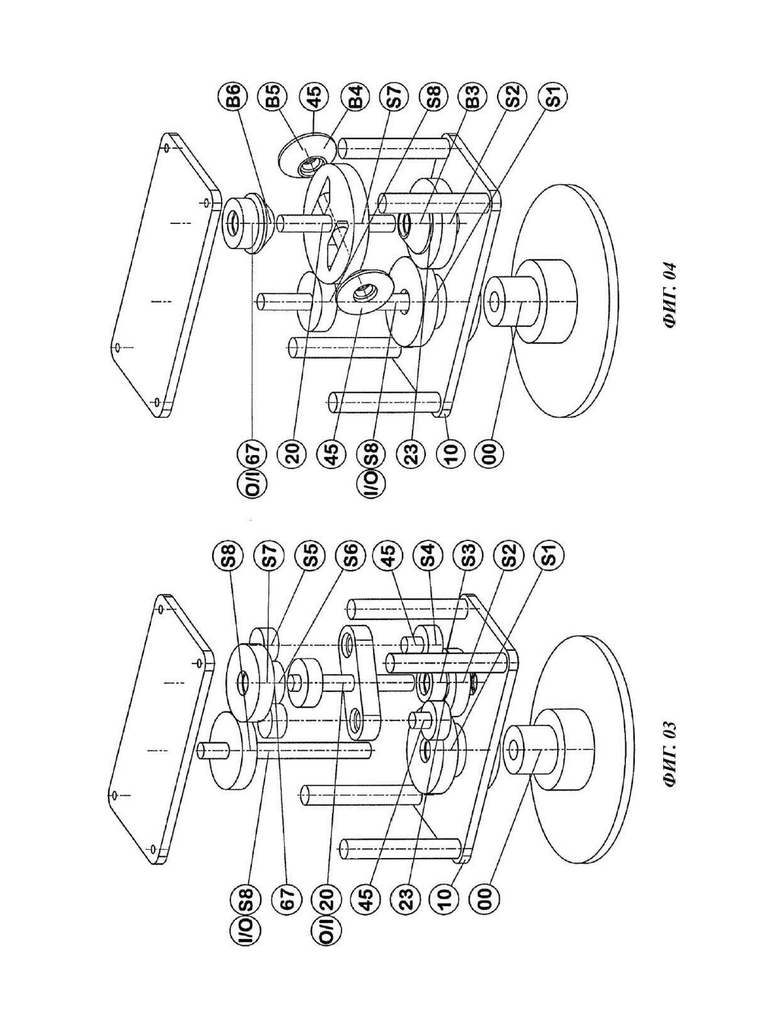
На фиг. 03: разнесенный покомпонентный вид в аксонометрии механизма с фиг. 01, где также планетарное водило повернуто под случайным углом, чтобы ясно были видны сателлитные шестерни.
На фиг. 04: разнесенный покомпонентный вид в аксонометрии механизма с фиг. 02, где также планетарное водило повернуто под случайным углом, чтобы ясно были видны сателлитные шестерни.
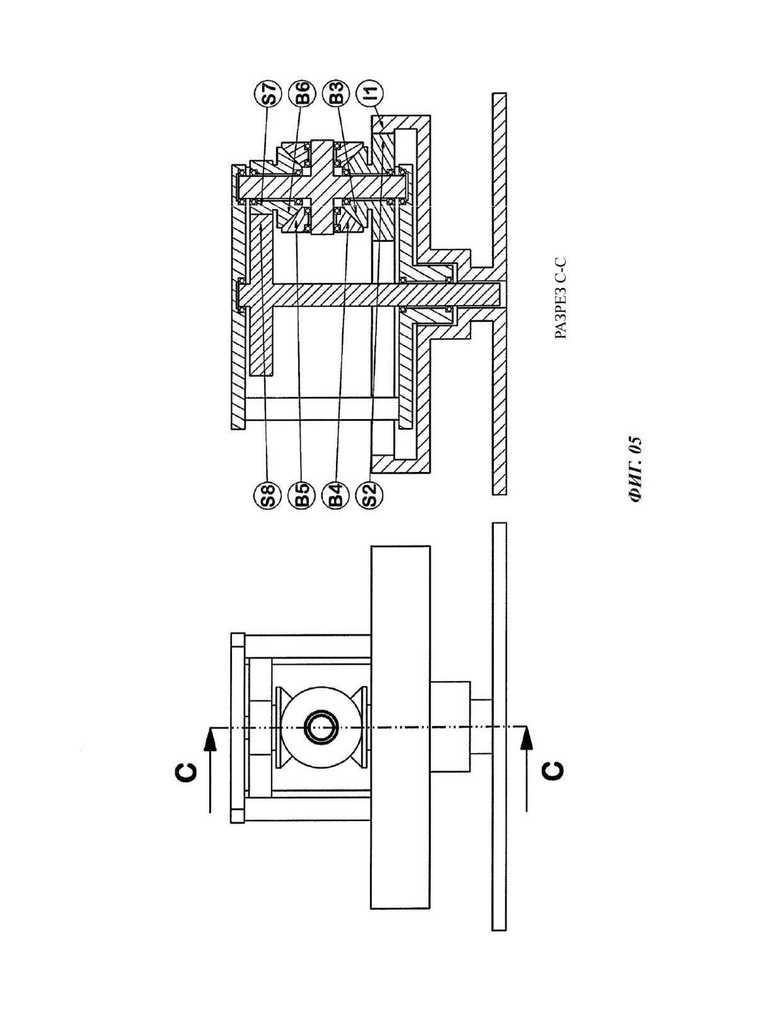
На фиг. 05: вид сбоку и меридианный разрез С-С механизма с цилиндрическими и коническими шестернями, реактивная солнечная шестерня которого является внутренней шестерней.
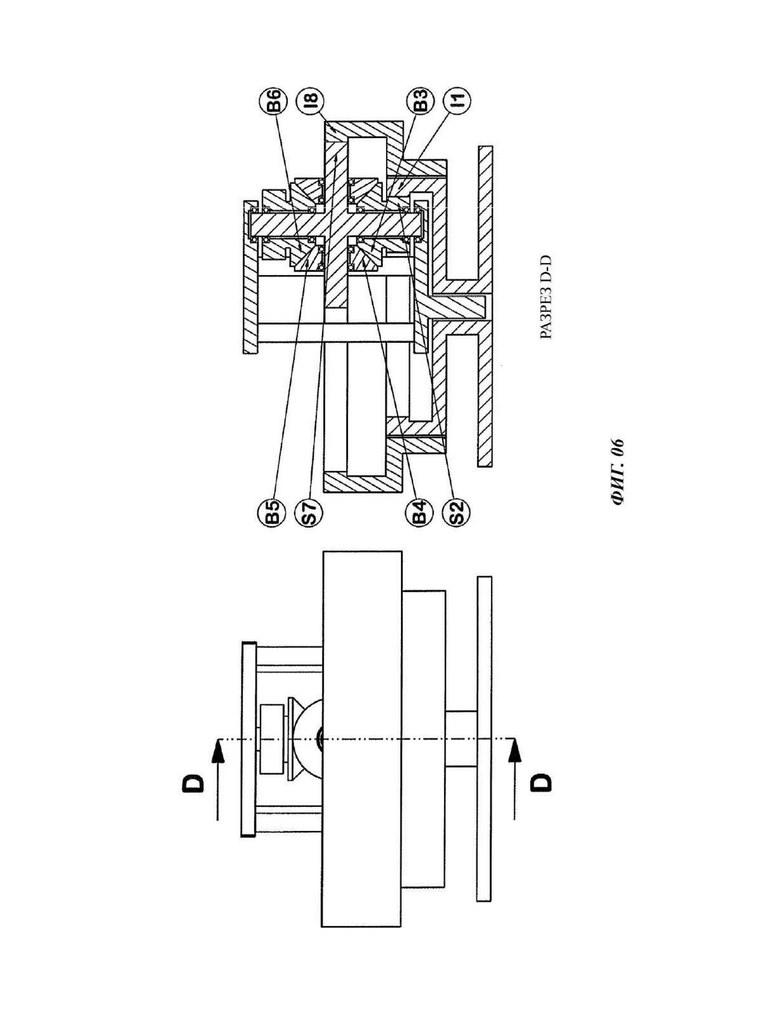
На фиг. 06: вид сбоку и меридианный разрез D-D механизма с цилиндрическими и коническими шестернями, реактивная солнечная шестерня и активная солнечная шестерня которого являются внутренними шестернями.
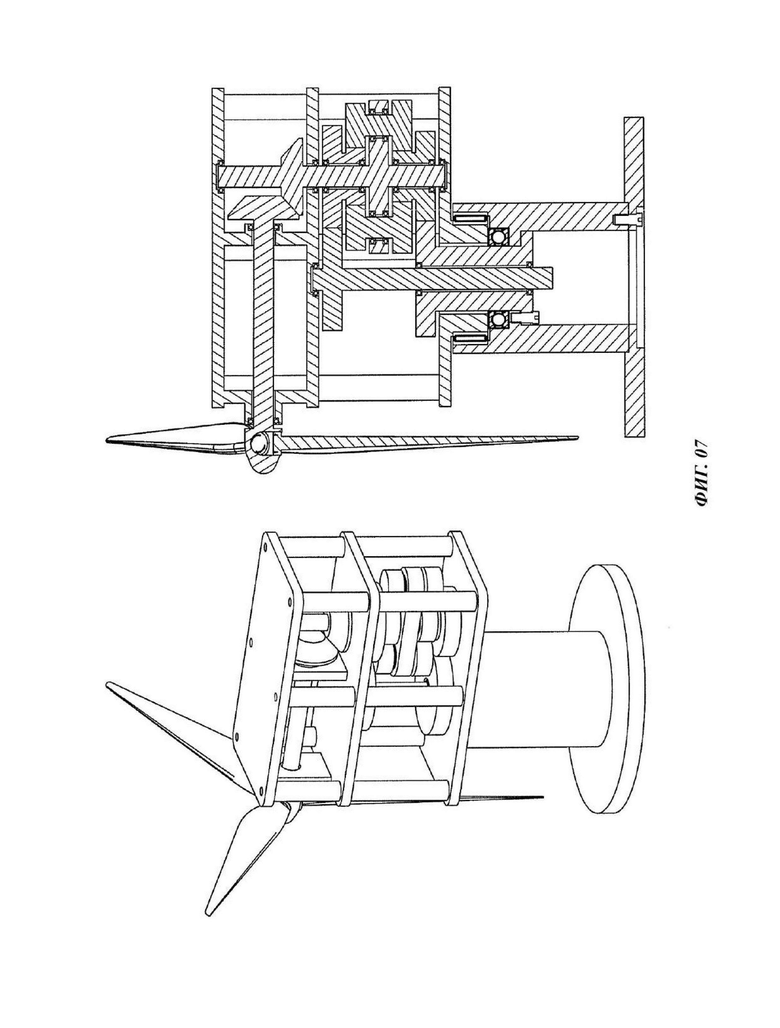
На фиг. 07: вид в аксонометрии и меридианный разрез применения механизма - с использованием цилиндрических шестерен только в основном механизме - к ветровой турбине, поясняющие конструктивные подробности этого применения.
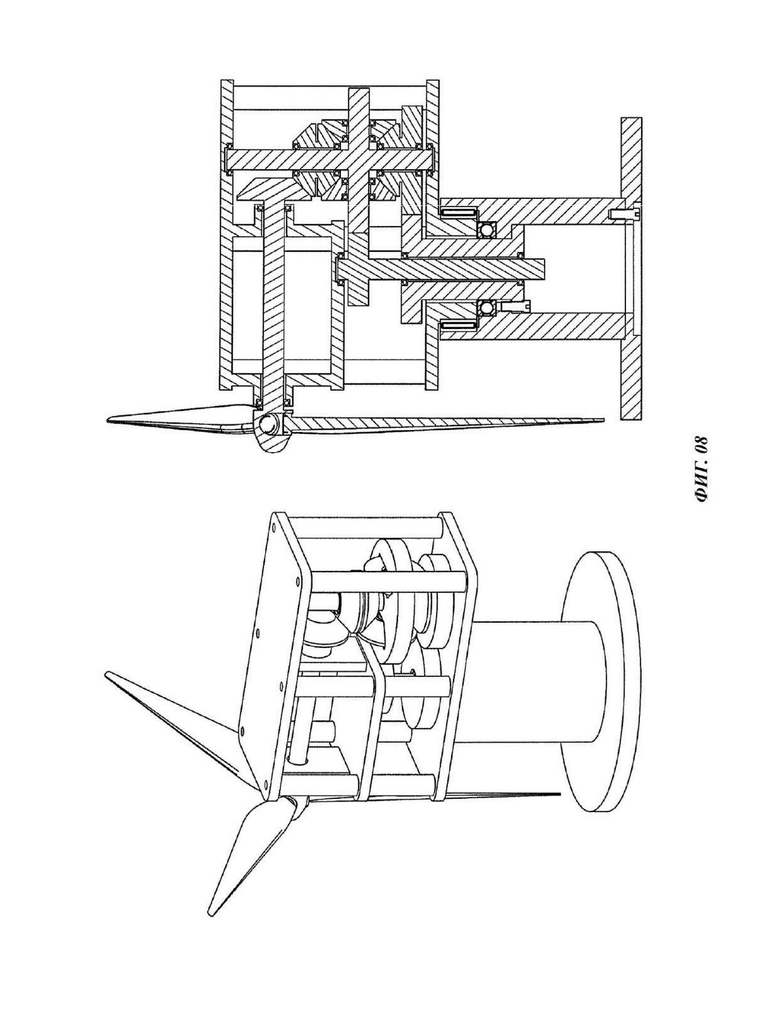
На фиг. 08: вид в аксонометрии и меридианный разрез применения механизма - с использованием цилиндрических и конических шестерен в основном механизме - к ветровой турбине, которые также поясняют конструктивные подробности этого применения.
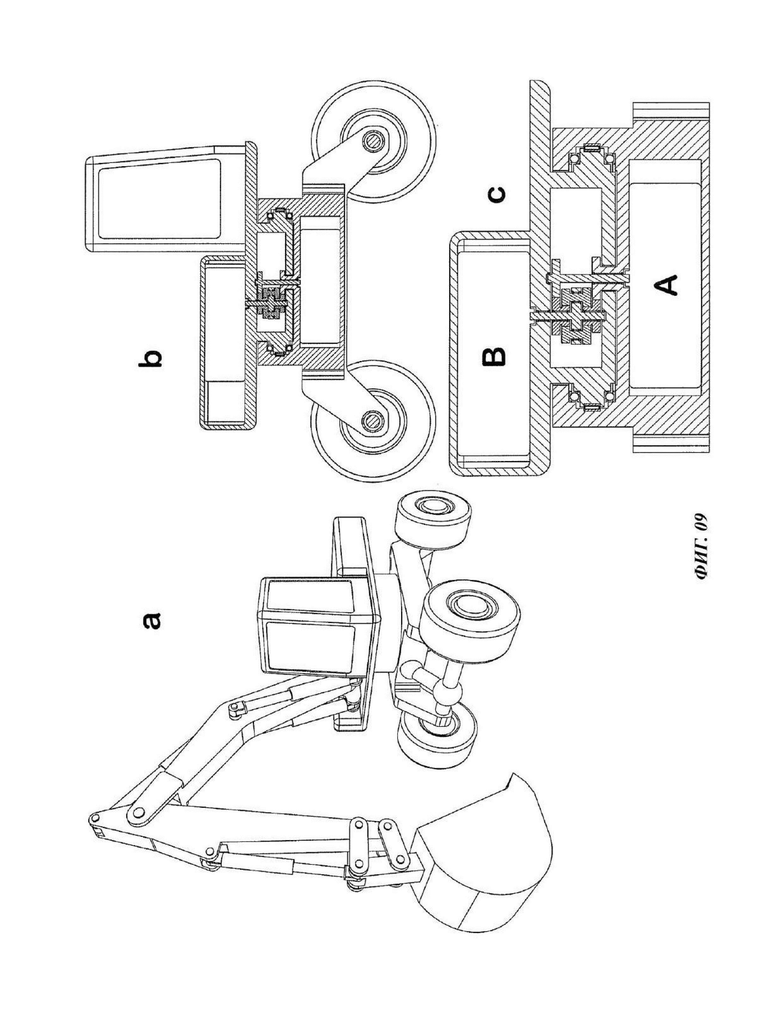
На фиг. 09: вид (а) в аксонометрии и меридианный разрез (b) экскаватора, а также увеличенный вид этого же меридианного разреза (с), который может быть также меридианным разрезом боевого танка или даже здания, такого как маяк или вращающаяся башня.
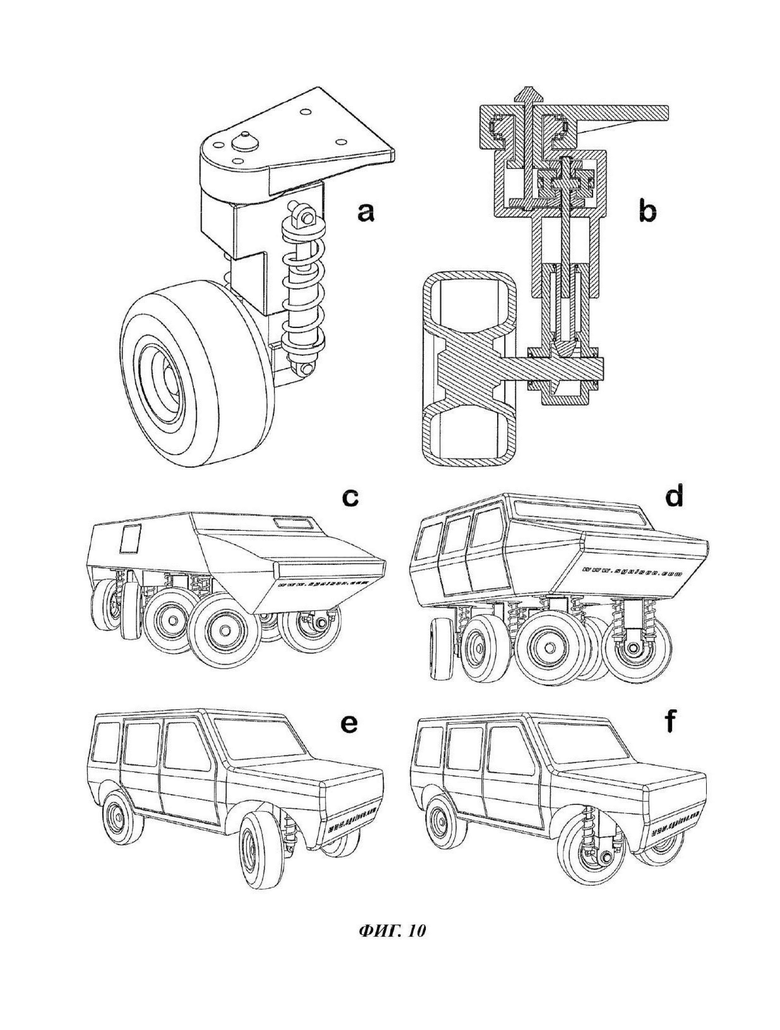
На фиг. 10: вид (а) в аксонометрии и меридианный разрез (b) узла рулевого кронштейна, а также его применение в чисто военном транспортном средстве 8X8X8 (с), специальном транспортном средстве 6X6X6 (d) для экстремального спорта и классическом легковом автомобиле 4X2X2 с обычным углом (е) поворота и экстраординарным углом поворота (f).
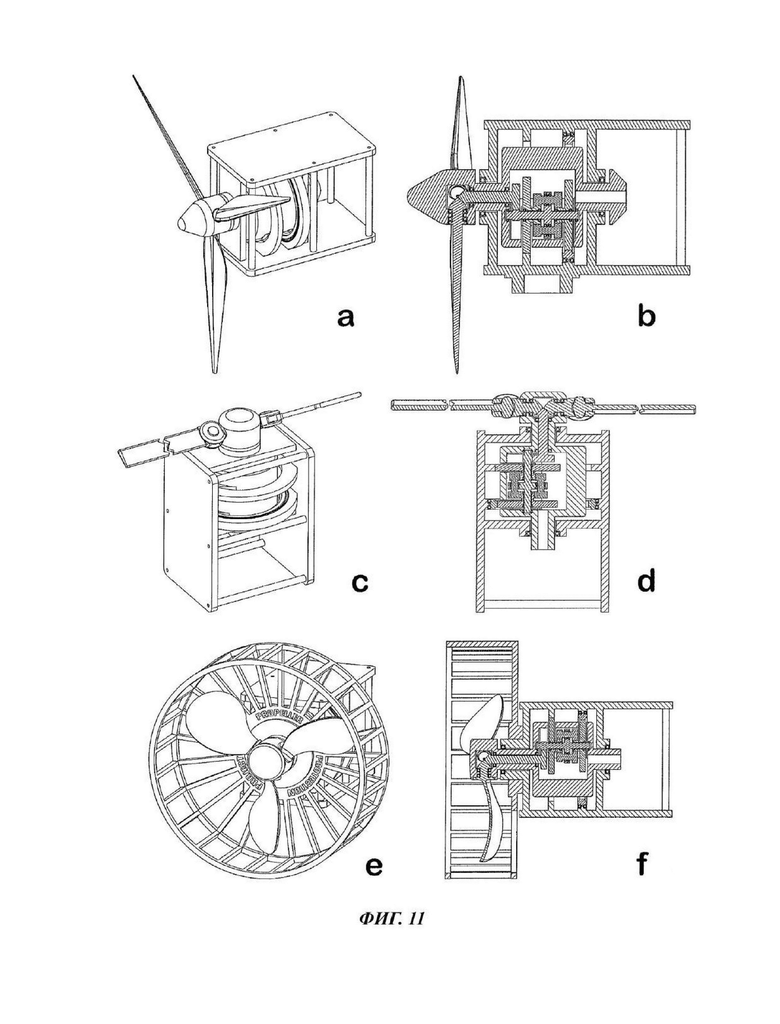
На фиг. 11: вид (а) в аксонометрии и меридианный разрез (b) начала силовой передачи для ветровой турбины или конца силовой передачи для воздушного судна, приводимого в движение воздушным винтом, вид (с) в аксонометрии и меридианный разрез (d) конца силовой передачи для вертолета, а также вид (е) в аксонометрии и меридианный разрез (f) конца силовой передачи для водного судна, приводимого в движение гребным винтом; все эти чертежи относятся к механизму регулировки шага винта.
Осуществление изобретения
Комментарии к чертежам:
- для полного понимания конструкции и работы комбинированного планетарного механизма достаточно фиг. 01 и фиг. 02; однако фиг. 03 и фиг. 04 проясняют еще больше конструктивных подробностей,
- фиг. 05 и фиг. 06 дают довольно поверхностное представление еще двух конкретных реализаций, поэтому на этих чертежах все задействованные элементы имеют обозначение, как на фиг. 02, если их обозначение не указано иначе,
- поскольку вал, несущий активную солнечную шестерню (S8), не несет никакой другой шестерни, на чертежах этот вал также обозначен S8,
- для лучшего понимания всех этих чертежей, там, где элементы жестко соединены друг с другом, они либо изображены как единый элемент, либо их штриховка одинакова по плотности и углу.
Таким образом комбинированной планетарный механизм имеет опору (00), которая условно неподвижна в пространстве или жестко соединена с подвижной или временно неподвижной конструкцией, и первое водило, называемое «центральным водилом» (10), ось которого называется «центральной осью», и которое установлено на опоре (00) и имеет возможность свободного и бесконечного вращения вокруг центральной оси.
Комбинированный планетарный механизм также имеет первую цилиндрическую шестерню, называемую «реактивной солнечной шестерней», являющуюся либо наружной шестерней (S1), либо внутренней шестерней (I1), жестко соединенную с опорой (00) коаксиально с центральной осью и имеющую количество зубьев, равное ZS1 или ZI1, соответственно, и вторую цилиндрическую шестерню, называемую «активной солнечной шестерней», являющуюся либо наружной шестерней (S8), либо внутренней шестерней (I8), установленную на опоре (00) коаксиально с центральной осью и имеющую возможность свободного и бесконечного вращения вокруг центральной оси, образующую либо вход, либо выход комбинированного планетарного механизма и имеющую количество зубьев ZS8 или ZI8, соответственно.
Центральное водило (10) имеет множество осей, каждая из которых называется «планетарной осью», предпочтительно - параллельных центральной оси и находящихся на расстоянии от центральной оси, общей для всех планетарных осей, предпочтительно, распределенных под одинаковыми углами вокруг центральной оси.
Второе водило (20), соответствующее каждой из этих планетарных осей, называется «планетарным водилом», установлено на центральном водиле (10) коаксиально со своей соответствующей планетарной осью и способно свободно и бесконечно вращаться вокруг этой планетарной оси, при этом каждое планетарное водило (20) имеет множество осей, каждая из которых называется «сателлитной осью», предпочтительно - параллельных этой планетарной оси и находящихся на расстоянии от этой планетарной оси, общей для всех этих сателлитных осей, предпочтительно распределенных под одинаковыми углами вокруг этой планетарной оси.
Первый вал (45), соответствующий каждой из этих сателлитных осей, называемый «сателлитным валом», установлен на планетарном водиле (20) коаксиально с соответствующей сателлитной осью, способен свободно и бесконечно вращаться вокруг этой сателлитной оси и имеет третью шестерню, называемую «реактивной сателлитной шестерней», коаксиально и жестко соединенную с одним концом этого сателлитного вала (45), являющуюся либо цилиндрической (S4), либо конической (В4) и имеющую количество зубьев, равное ZS4 или ZB4, соответственно, а также имеет четвертую шестерню, называемую «активной сателлитной шестерней», коаксиально и жестко соединенную с другим концом этого сателлитного вала (45), являющуюся либо цилиндрической (S5), либо конической (В5), и имеющую количество зубьев, равное ZS5 или ZB5, соответственно.
Второй вал (23), соответствующий каждой из планетарных осей, называется «планетарным реактивным валом», установлен на планетарном водиле (20) коаксиально со своей соответствующей планетарной осью, способен свободно и бесконечно вращаться вокруг этой планетарной оси и имеет пятую цилиндрическую шестерню (S2), называемую «реактивной солнечно-планетарной шестерней», коаксиально и жестко соединенную с одним концом этого планетарного реактивного вала (23), взаимодействующую с реактивной солнечной шестерней (S1 или I1) и имеющую количество зубьев, равное ZS2, а также имеет шестую шестерню, называемую «реактивной сателлитно-планетарной шестерней», коаксиально и жестко соединенную с другим концом этого планетарного реактивного вала (23), являющуюся либо цилиндрической шестерней (S3), либо конической шестерней (В3), взаимодействующую с реактивной сателлитной шестерней (S4 или В4, соответственно) и имеющую количество зубьев, равное ZS3 или ZB3, соответственно.
Каждой из планетарных осей также соответствует третий вал (67), называемый «планетарным активным валом», который установлен на планетарном водиле (20) коаксиально со своей соответствующей планетарной осью, способный свободно и бесконечно вращаться вокруг этой планетарной оси и имеющий седьмую цилиндрическую шестерню (S7), называемую «активной солнечно-планетарной шестерней», коаксиально и жестко соединенную с одним концом этого планетарного активного вала (67), взаимодействующую с активной солнечной шестерней (S8 или I8) и имеющую количество зубьев, равное ZS7, а также имеющий восьмую шестерню, называемую «активной сателлитно-планетарной шестерней», коаксиально и жестко соединенную с другим концом этого активного планетарного вала (67), являющуюся либо цилиндрической (S6), либо конической (В6), взаимодействующую с активной сателлитной шестерней (S5 или В5, соответственно) и имеющую количество зубьев, равное ZS6 или ZB6, соответственно.
В зависимости от конструкции комбинированного планетарного механизма, в его обобщенной конфигурации либо любое из планетарных водил (20), либо любой из планетарных активных валов (67) образует либо выход, либо вход комбинированного планетарного механизма - инверсно в зависимости от роли активной солнечной шестерни (S8 или I8) - и называется «эксцентрическим валом» (20 или 67).
Таким образом, локальная угловая скорость этого эксцентрического вала (20 или 67) вокруг его собственной оси относительно центрального водила (10) должна быть независимой от угловой скорости центрального водила (10) относительно опоры (00), при этом также должна зависеть только от угловой скорости активной солнечной шестерни (S8 или I8) относительно опоры (00), и для достижения этих требований необходимо, чтобы количество зубьев всех задействованных зубчатых шестерен удовлетворяло вышеупомянутому «условию независимости».
В частности, существуют следующие реализации комбинированного планетарного механизма:
- с исключительным использованием цилиндрических шестерен, точно так же, как показано на фиг. 01 и фиг. 03, где единственное планетарное водило (20) совпадает с эксцентрическим валом (20 или 67), при этом условие независимости является следующим:
ZS1/ZS2*ZS3/ZS4*ZS5/ZS6*ZS7/ZS8=1,
- с использованием цилиндрических и конических шестерен, в общем, как показано на фиг. 02 и фиг. 04, где единственный планетарный активный вал (67) совпадает с эксцентрическим валом (20 или 67), при этом условие независимости, в общем, является следующим:
(ZS1/ZS2*ZS7/ZS8-1)*ZB3/ZB4*ZB5/ZB6=1,
а также в случае объединения двух конических сателлитных шестерен, жестко соединенных с сателлитным валом (45), в одну коническую шестерню, так, как показано на фиг. 02 и фиг. 04, где условие независимости упрощается следующим образом:
ZS1/ZS2*ZS7/ZS8=2,
- с использованием цилиндрических и конических шестерен, при этом реактивная солнечная шестерня (I1) является внутренней шестерней, а все остальные шестерни являются наружными, где единственное планетарное водило (20) совпадает с эксцентрическим валом (20 или 67), а конические сателлитные шестерни также объединены в одну коническую шестерню, как показано на фиг.05, при этом условие независимости является следующим:
ZI1/ZS2*ZS7/ZS8=1,
- с использованием цилиндрических и конических шестерен, при этом реактивная солнечная шестерня (I1) и активная солнечная шестерня (I8) являются внутренними шестернями, а все остальные шестерни являются наружными, где единственный планетарный активный вал (67) совпадает с эксцентрическим валом (20 или 67), а конические сателлитные шестерни также объединены в одну коническую шестерню, как показано на фиг. 06, при этом условие независимости является следующим:
ZI1/ZS2*ZS7/ZI8=2.
Примечание: во всех вышеперечисленных случаях условие независимости является элегантным и простым; однако следует проявлять особую внимательность, чтобы отдельные местные передаточные отношения не приводили к неопределенности углового положения какой-либо задействованной движущейся детали.
Далее будут представлены некоторые более специализированные применения комбинированного планетарного механизма:
Интересующим случаем, как уже упоминалось выше, является его применение с горизонтальной осью ветровой турбины, чтобы энергия, вырабатываемая на горизонтальном валу пропеллера, передавалась от бесконечно вращающейся гондолы, которая, фактически, является водилом (10) комбинированного планетарного механизма, на которое он опирается, к неподвижной мачте, которая, фактически, также является опорой (00) комбинированного планетарного механизма, причем эта передача полностью -кинематически и динамически - независима от бесконечного вращения гондолы (10), движения, которое требуется, чтобы плоскость вращения пропеллеров принимала наилучшую возможную ориентацию для оптимального использования располагаемой ветровой энергии.
Конкретнее, это две репрезентативные реализации:
- с исключительным использованием только цилиндрических шестерен для комбинированного планетарного механизма, как показано на фиг. 07, где также показан способ, которым горизонтальный вал пропеллера передает мощность единственному планетарному водилу (20) комбинированного планетарного механизма через конические шестерни,
- с использованием цилиндрических и конических шестерен, как показано на фиг. 08, где снова показан способ, которым горизонтальный вал пропеллера передает мощность на единственный планетарный активный вал (67) комбинированного планетарного механизма, также через конические шестерни.
Во всех вышеперечисленных случаях, если электрический генератор и, возможно, редуктор ветровой турбины расположены на основании ее мачты или рядом с ним, вал, который должен передавать мощность от активной солнечной шестерни (S8 или I8), которая расположена на вершине мачты ветровой турбины, к ее основанию или рядом с ним, может быть удлиненной пространственной опорной конструкцией с достаточной прочностью и жесткостью на кручение, поддерживаемой подшипниковыми узлами в конкретных местах вдоль продольной оси мачты, которая также может использоваться - разумеется, после ее надежной иммобилизации - в качестве лестницы для доступа к верхней части ветровой турбины для регулярного осмотра и технического обслуживания,.
Примечание: такое суммарное передаточное отношение должно быть достигнуто, чтобы вал, который должен передавать мощность от верхней части мачты ветровой турбины к ее основанию или рядом с ней, вращался с частотой, достаточно далекой от ее собственной частоты.
Также, применение комбинированного планетарного механизма, в общем показанного на фиг. 09, относится к конструкции, которая представляет собой либо здание, либо любое другое сооружение с основанием, неподвижным относительно земли, такое как маяк или вращающаяся башня (например, «ОТЕ Tower» Международной ярмарки в Салониках), либо подвижным, такое как большой экскаватор или боевой танк, конструкция которого имеет по меньшей мере два отделения с возможностью бесконечного углового движения каждого отделения относительно соседнего, при этом одно отделение конструкции, такое как грунт или шасси в этих примерах, совпадает с опорой (00) комбинированного планетарного механизма, тогда как соседнее отделение, такой как башня или турель в этих примерах, совпадает с бесконечно вращающимся центральным водилом (10) комбинированного планетарного механизма, с конечным результатом передачи бесконечного вращения от ведущего вала на одном отделении к ведомому валу на соседнем отделении, независимо от бесконечного относительного вращения между этими отделениями; разумеется, эту процедуру можно повторять от одного отделения к соседнему, столько раз, сколько требуется из-за количества отделений.
Более конкретно, для экскаватора существует возможность размещения двигателя и гидравлического оборудования в месте В, как показано на фиг. 09(c), как это происходит в настоящее время, а в месте А, как также показано на фиг. 09(c), может находиться механический дифференциал и остальная часть чисто механической силовой передачи для передачи мощности на колеса, или возможность размещения двигателя - предпочтительно оппозитного - в месте А, а гидравлического оборудования только в месте В, удерживая центр тяжести на более низком возможном уровне, что делает использование этого экскаватора более безопасным и эффективным.
Другое применение комбинированного планетарного механизма, как показано на фиг. 10, заключается в рулевом кронштейне, который несет ведущее колесо транспортного средства, причем этот рулевой кронштейн установлен на шасси транспортного средства и вращается вокруг оси, предпочтительно перпендикулярной оси вращения колеса, с целью управления транспортным средством, таким образом, передача мощности от шасси, которое совпадает с опорой (00) комбинированного планетарного механизма, к бесконечно вращающемуся ведущему колесу этого транспортного средства достигается независимо от вращения рулевого кронштейна, который совпадает с центральным водилом (10) комбинированного планетарного механизма; это вращение рулевого управления обычно является конечным, однако благодаря этой конфигурации, может быть также бесконечным, что таким образом делает автомобиль действительно голономным.
Как показано на фиг. 10(b), выход комбинированного планетарного механизма, который является планетарным водилом (20) по фиг. 01, соединен с коаксиальным шлицевым валом, образуя телескопический трансмиссионный вал переменной длины, в опорной конструкции рулевого кронштейна переменной длины, что дает таким образом еще одну степень свободы колесу, при этом с помощью аналогичных машиностроительных приемов колесо может получить все необходимые степени свободы, так что во многих применениях комбинированный планетарный механизм может заменить шарикоподшипниковое соединение с постоянной скоростью.
Наконец, еще одним применением комбинированного планетарного механизма, как показано на фиг. 11, является его использование для регулировки шага винта для винтового воздушного судна, вертолета, водного судна с гребным винтом, а также ветровой турбины, где втулка винта совпадает с бесконечно вращающимся водилом (10) комбинированного планетарного механизма, при этом опорная конструкция воздушного судна, опорная конструкция вертолета, опорная конструкция водного судна, вращающаяся гондола ветровой турбины в случае горизонтальной оси или неподвижная мачта ветровой турбины в любом другом случае совпадают с опорой (00) комбинированного планетарного механизма, при этом вращение для регулировки шага винта может быть даже бесконечным; для этого применения была использована конфигурация по фиг. 06 с двумя внутренними шестернями, поскольку она приводит к наиболее компактной и надежной общей конфигурации.
Преимущества
Базовая конфигурация настоящего изобретения включает в себя только пять движущихся частей, а именно солнечную активную шестерню, планетарный активный вал, сателлитный вал, планетарный реактивный вал и планетарное водило, с добавлением, конечно же, шестой движущейся части, которая является центральным водилом; это центральное водило, конечно, уже существует с самого начала конструкции и фактически является движущейся частью с - в некотором роде - нежелательным движением.
Работа базовой конфигурации настоящего изобретения также основана на взаимодействии только четырех пар взаимодействующих шестерен, при этом все эти шестерни могут быть, и более того - предпочтительнее, являются стандартными.
Более того, отсутствует какой-либо другой элемент, который должен быть специализированным; поэтому результатом является максимально простые и экономичные конструкция и обслуживание, в то же время, благодаря минимально возможному количеству движущихся частей, достигается максимально возможная степень эффективности, что приводит к максимально продуктивной возможной эксплуатации.
Также важно, что сама по себе конструкция настоящего изобретения позволяет достичь наиболее сбалансированного расположения диаметров шестерен, что позволяет избежать проблемной ведущей шестерни, которая является самым слабым звеном в любой силовой передаче. Более того, при рассмотрении некоторых конкретных применений настоящего изобретения, преимущества станут более очевидными и понятными:
- перемещение подавляющего большинства рабочих элементов ветровой турбины из ее вращающейся гондолы в ее неподвижную мачту, ведущее к резкому облегчению гондолы, а также к резкому сокращению затрат на строительство и техническое обслуживание,
- кроме того, в результате сочетания концепции заявки PCT/GR2021/000012 с концепцией настоящего изобретения получается конфигурация с общим передаточным отношением, настолько высоким, насколько это требуется конструкцией ветровой турбины в целом, таким образом, эта конфигурация содержит высокоэффективный повышающий редуктор, принимающий низкую скорость от вала пропеллера и обеспечивающий высокую скорость электрическому генератору, заменяющий используемый в настоящее время повышающий редуктор, и достижение всего этого осуществляется путем вставки только пяти новых движущихся частей,
- передача электроэнергии самым простым способом, без излишне сложной конфигурации с низкой производительностью и недолговечными элементами, такими как электрические токосъемные кольца,
- обеспечение чисто бесконечного вращения башни большого экскаватора или боевого танка, относительно его шасси, тогда как при существующей технологии вращение либо является конечным и со значительно более коротким угловым ходом, чем полный оборот, либо он значительно дороже в конструкции и обслуживании, если бесконечное вращение возможно, но со специальным уплотнением для вращения гидравлического трубопровода,
- максимальное снижение уровня центра тяжести экскаватора или боевого танка, что делает использование экскаватора или боевого танка более эффективным и безопасным,
- выполнение полноприводного транспортного средства со всеми ведущими колесами, действительно голономного, так как рулевые кронштейны можно вращать, для рулевого управления, абсолютно бесконечным образом,
- также выполнение транспортного средства с чрезвычайно высоким клиренсом над землей для специального использования - например, для пожаротушения на пересеченной и неровной местности, - поскольку высота каждого узла рулевого кронштейна может быть настолько большой, насколько это требуется,
- обеспечение возможности передачи огромного количества мощности через колеса, которые одновременно приводят в движение и управляют транспортным средством, даже в классическом переднеприводном автомобиле, с нормальной амплитудой угла поворота рулевого колеса, поскольку эта передача осуществляется с помощью надежных шестерен, а не требующих осторожного обращения шариков шарикоподшипникового шарнира равных угловых скоростей, что может сделать это применение настоящего изобретения новым и многообещающим предложением для приведения в движение транспортное средство любого типа, в частности, военного или даже суперкара,
- обеспечение наиболее элегантной, компактной и прочной конфигурации, даже в случае регулировки шага винта, хотя используемые в настоящее время механизмы эффективны из-за необходимости конечного рабочего хода, вращательного или линейного,
- обеспечение возможности даже бесконечного вращения для регулировки шага винта, что бы это ни подразумевало.
Таким образом, это является рядом достоинств настоящего изобретения, которые явно выделяются как преимущества над конкурентами, которых, фактически, не существует, или, в тех немногих и отдельных случаях, когда они существуют, они являются довольно скромными.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ В ЦЕНТРАХ ТЕЛ С ПАРАЛЛЕЛЬНО СМЕЩЕННЫМИ ОСЯМИ ВРАЩЕНИЯ | 1993 |
|
RU2049597C1 |
| УСТРОЙСТВО ДЕМПФИРОВАНИЯ КРУТИЛЬНОЙ ВИБРАЦИИ (ВАРИАНТЫ) | 2018 |
|
RU2693397C1 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ В ГИБРИДНОЙ ТРАНСМИССИИ | 2015 |
|
RU2669086C2 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2693443C1 |
| ТРАНСМИССИЯ С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ | 2015 |
|
RU2668772C1 |
| Привод, в частности, для несущего винта летательного аппарата с несущим винтом | 2020 |
|
RU2802265C2 |
| СПОСОБ ДЛЯ ЗАПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ В ГИБРИДНОЙ ТРАНСМИССИИ И ТРАНСПОРТНОЕ СРЕДСТВО С ТАКОЙ ГИБРИДНОЙ ТРАНСМИССИЕЙ | 2015 |
|
RU2654849C2 |
| Трансмиссия автомобиля | 1980 |
|
SU961551A3 |
| СПОСОБ УПРАВЛЕНИЯ ГИБРИДНОЙ СИЛОВОЙ ПЕРЕДАЧЕЙ, ТРАНСПОРТНОЕ СРЕДСТВО И ЭЛЕКТРОННОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОЙ СИЛОВОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2653346C2 |
| СИСТЕМА ВИНТОВ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ ДЛЯ ТУРБОМАШИНЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2551143C2 |

Группа изобретений относится к области машиностроения. Предложен комбинированный планетарный механизм с центральным водилом, двумя солнечными шестернями, эксцентрическим планетарным водилом, на котором установлен эксцентрический сателлитный вал, несущий сателлитные шестерни, и планетарные шестерни, взаимодействующие с солнечными шестернями и сателлитными шестернями. Также заявлена ветровая турбина, включающая механизм, подвижная конструкция, включающая механизм, и водное судно с гребным винтом, включающее механизм. Обеспечивается передача вращения от ведущего вала на неподвижной опоре к ведомому валу на вращающемся водиле или наоборот, независимо от вращения водила, с минимально возможным количеством движущихся частей и повышенной эффективностью. 5 н.п. ф-лы, 11 ил.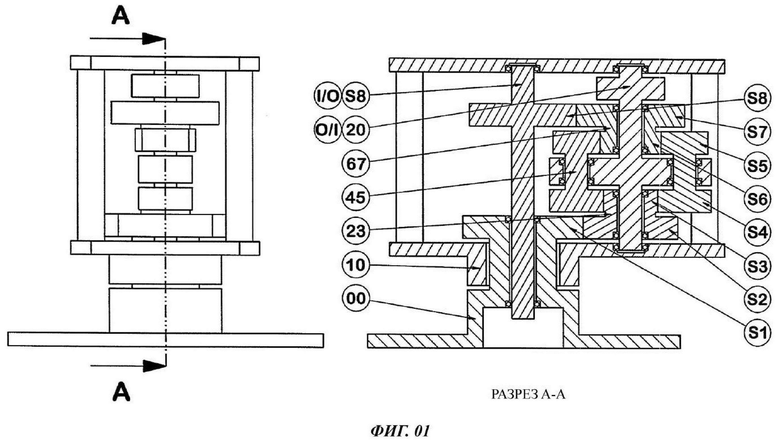
1. Комбинированный планетарный механизм, содержащий:
- опору (00),
- первое водило (10), называемое «центральным водилом», ось вращения которого называется «центральной осью», при этом центральное водило (10) установлено на опоре (00) и имеет возможность свободного и бесконечного вращения вокруг центральной оси,
- первую шестерню, называемую «реактивной солнечной шестерней», которая либо предпочтительно жестко соединена с опорой (00) коаксиально с центральной осью, либо установлена на опоре (00) и имеет возможность свободного и бесконечного вращения вокруг центральной оси, представляет собой предпочтительно цилиндрическую шестерню, а также либо наружную шестерню (S1), либо внутреннюю шестерню (I1) с количеством зубьев ZS1 или ZI1 соответственно,
- вторую шестерню, называемую «активной солнечной шестерней», которая установлена на опоре (00) и имеет возможность свободного и бесконечного вращения вокруг центральной оси, представляет собой предпочтительно цилиндрическую шестерню, а также либо наружную шестерню (S8), либо внутреннюю шестерню (I8) с количеством зубьев ZS8 или ZI8 соответственно, и представляет собой либо вход, либо выход комбинированного планетарного механизма,
отличающийся тем, что:
- имеет по меньшей мере один простой планетарный механизм,
содержащий:
- второе водило (20), называемое «планетарным водилом», установленное на центральном водиле (10) и имеющее возможность свободного и бесконечного вращения вокруг оси, называемой «планетарной осью», предпочтительно параллельно центральной оси и на расстоянии от центральной оси, при этом планетарное водило (20) имеет по меньшей мере один первый вал (45), называемый «сателлитным валом», который установлен на планетарном водиле (20) и имеет возможность свободного и бесконечного вращения вокруг оси, называемой «сателлитной осью», которая имеет конкретное и постоянное направление между параллельным и перпендикулярным планетарной оси, предпочтительно либо точно параллельное планетарной оси и на расстоянии от планетарной оси, либо точно перпендикулярное планетарной оси, при этом предусмотрена третья шестерня, называемая «реактивной сателлитной шестерней», жестко соединенная с одним концом сателлитного вала (45) коаксиально с сателлитной осью, представляющая собой либо цилиндрическую шестерню (S4), либо коническую шестерню (В4) с количеством зубьев ZS4 или ZB4 соответственно, а также четвертая шестерня, называемая «активной сателлитной шестерней», жестко соединенная с другим концом сателлитного вала (45) коаксиально с сателлитной осью, представляющая собой либо цилиндрическую шестерню (S5), либо коническую шестерню (В5) с количеством зубьев ZS5 или ZB5 соответственно,
- второй вал (23), называемый «планетарным реактивным валом», установленный на планетарном водиле (20) и имеющий возможность свободного и бесконечного вращения вокруг планетарной оси, при этом предусмотрена пятая шестерня (S2), называемая «реактивной солнечно-планетарной шестерней», жестко соединенная с одним концом планетарного реактивного вала (23) коаксиально с планетарной осью, представляющая собой шестерню, имеющую возможность надлежащего взаимодействия с реактивной солнечной шестерней (S1 или I1) с количеством зубьев ZS2, а также шестая шестерня, называемая «реактивной сателлитно-планетарной шестерней», жестко соединенная с другим концом планетарного реактивного вала (23) коаксиально с планетарной осью, представляющая собой либо цилиндрическую шестерню (S3), либо коническую шестерню (В3) и выполненная с возможностью взаимодействия с реактивной сателлитной шестерней (S4 или В4 соответственно) с количеством зубьев ZS3 или ZB3 соответственно,
- третий вал (67), называемый «планетарным активным валом», установленный на планетарном водиле (20) и имеющий возможность свободного и бесконечного вращения вокруг планетарной оси, при этом предусмотрена седьмая шестерня, называемая «активной сателлитно-планетарной шестерней», жестко соединенная с одним концом планетарного активного вала (67) коаксиально с планетарной осью, представляющая собой либо цилиндрическую шестерню (S6), либо коническую шестерню (В6) и выполненная с возможностью взаимодействия с активной сателлитной шестерней (S5 или В5 соответственно), с количеством зубьев ZS6 или ZB6 соответственно,
при этом предусмотрено взаимодействие активной солнечной шестерни (S8 или I8) с восьмой шестерней (S7), называемой «активной солнечно-планетарной шестерней», представляющей собой шестерню, выполненную с возможностью надлежащего взаимодействия с активной солнечной шестерней (S8 или I8), с количеством зубьев ZS7, которая жестко соединена коаксиально с планетарной осью:
- либо с другим концом планетарного активного вала (67), и, следовательно, планетарное водило (20) представляет собой либо выход, либо вход комбинированного планетарного механизма, при этом отношение, применимое ко всем задействованным шестерням, равно: K*L=1,
- либо с планетарным водилом (20), и, следовательно, планетарный активный вал (67) представляет собой либо выход, либо вход комбинированного планетарного механизма, при этом отношение, применимое ко всем задействованным шестерням, равно (1 -K)*L=1,
где:
K=ZS1/ZS2*ZS7/ZS8 или K=-ZI1/ZS2*ZS7/ZS8, или K=-ZS1/ZS2*ZS7/ZI8, или K=ZI1/ZS2*ZS7/ZI8 и:
L=ZS3/ZS4*ZS5/ZS6 или L=-ZB3/ZB4*ZB5/ZB6,
так чтобы комбинированный планетарный механизм передавал бесконечное вращение от активной солнечной шестерни (S8 или I8) на опоре (00) либо планетарному водилу (20), либо планетарному активному валу (67) на центральном водиле (10), или наоборот, независимо от бесконечного вращения центрального водила (10) относительно опоры (00).
2. Ветровая турбина с горизонтальной осью, содержащая комбинированный планетарный механизмом по п. 1, в которой опора (00) выполнена совпадающей с неподвижной мачтой ветровой турбины, а центральное водило (10) выполнено совпадающим с вращающейся гондолой ветровой турбины, при этом либо планетарное водило (20), либо планетарный активный вал (67) представляет собой вход комбинированного планетарного механизма и выполнено/выполнен с возможностью соединения с валом пропеллера ветровой турбины, при этом активная солнечная шестерня (S8 или I8) представляет собой выход комбинированного планетарного механизма и выполнена с возможностью соединения с валом электрического генератора, неподвижного относительно мачты, либо непосредственно, либо через редуктор, в местоположении на продольной оси мачты, так чтобы передавать бесконечное вращение от вала пропеллера на вращающейся гондоле к валу электрогенератора на неподвижной мачте, независимо от бесконечного вращения гондолы относительно мачты,
причем, когда электрический генератор и возможно редуктор находятся на основании мачты или рядом с ним, вал, выполненный с возможностью передачи бесконечного вращения от активной солнечной шестерни (S8), расположенной на вершине мачты, к основанию мачты или рядом с ним, предпочтительно представляет собой удлиненную пространственную опорную конструкцию с достаточной прочностью и жесткостью на кручение, поддерживаемую подшипниковыми узлами в конкретных местах вдоль продольной оси мачты, а также предусмотрена возможность его использования в качестве лестницы для доступа к вершине мачты.
3. Подвижная конструкция, имеющая по меньшей мере два отделения с возможностью бесконечного вращения каждого отделения относительно соседнего, содержащая комбинированный планетарный механизм по п. 1, в которой опора (00) выполнена совпадающей с одним отделением указанной конструкции, а центральное водило (10) выполнено совпадающим с соседним отделением, так чтобы передавать бесконечное вращение от ведущего вала на одном отделении к ведомому валу на соседнем отделении независимо от бесконечного относительного вращения между ними.
4. Рулевой кронштейн транспортного средства, поддерживающий бесконечно вращающееся ведущее колесо и выполненный с возможностью вращения вокруг оси, предпочтительно перпендикулярной оси вращения ведущего колеса, чтобы изменять направление движения транспортного средства, содержащий комбинированный планетарный механизм по п. 1, в котором опора (00) выполнена совпадающей с шасси транспортного средства, а центральное водило (10) выполнено совпадающим с вращающимся рулевым кронштейном, так чтобы передавать бесконечное вращение от ведущего вала на шасси транспортного средства к ведомому валу на рулевом кронштейне, причем ведомый вал в конечном итоге приводит в движение ведущее колесо транспортного средства независимо от вращения, конечного или бесконечного, рулевого кронштейна относительно шасси транспортного средства.
5. Водное судно с гребным винтом, содержащее комбинированный планетарный механизм по п. 1, в котором опора (00) выполнена совпадающей с опорной конструкцией водного судна, при этом центральное водило (10) выполнено совпадающим с вращающейся втулкой винта, так чтобы передавать вращение, конечное или бесконечное, от ведущего вала на указанной опоре к ведомому валу на бесконечно вращающейся втулке винта, независимо от вращения втулки винта относительно указанной опоры, главным образом, для регулировки шага винта.
| WO 2016016645 A3, 19.05.2016 | |||
| DE 102017207787 A1, 15.11.2018 | |||
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |

