Данное изобретение касается приводного узла, в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом согласно ограничительной части независимого пункта 1 формулы изобретения.
Кроме того, данное изобретение касается гибридного привода с предлагаемым изобретением приводным узлом, в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом, а также касается летательного аппарата с несущим винтом, содержащего указанный гибридный привод, соответственно, указанный приводной узел.
Из уровня техники известны приводные узлы в самых различных областях применения приводных систем или при производстве энергии. Такие приводные узлы зачастую содержат так называемые планетарные передачи или родственные, сопоставимые передачи.
Согласно определению, в случае планетарных передач речь идет о так называемых планетарных зубчатых передачах (из-за обращения планетарных зубчатых колес (сателлитов) вокруг солнечной шестерни), которые, по существу, содержат расположенную по центру солнечную шестерню, по меньшей мере одно, но большей частью несколько планетарных зубчатых колес (сателлитов), связанное с сателлитами водило планетарной передачи, а также расположенную снаружи, снабженную внутренними зубьями коронную шестерню, соответственно, расположенное снаружи, снабженное внутренними зубьями зубчатое кольцо. Преимущества применения планетарных передач заключаются в многообразных передаточных возможностях, а также в равномерной и распределенной передаче силы.
Планетарные передачи находят применение в приводных узлах в различных областях техники, как, например, в ветряных турбинах, в автомобилестроении, соответственно, в автомобилях, в судовых приводах, в авиации и т.п.
Из US 9,797,504 B2 известно, например, применение планетарной передачи для ветряной турбины. При вызываемом ветром (соответственно, приводимом в действие ветром) вращении вала основного винта ветряной турбины посредством планетарной передачи осуществляется передача, соответственно, конвертация низкого числа оборотов и высокого крутящего момента на валу несущего винта в высокое число оборотов и низкий крутящий момент генератора.
У летательных аппаратов с несущим винтом, в частности, в области вертолетостроения, приводной узел для приведения в действие несущего винта содержит зачастую выполненная в виде планетарной передачи или сходной передачи передача (редуктор) несущего винта вертолета, соответственно, главная передача. Этот вид передачи несущего винта вертолета получил преобладающее распространение, так как благодаря этому становится возможной надежная конструкция.
Такие используемые в области приводных систем планетарные передачи обладают тем недостатком, что требуемое для их установки место огромно, и к тому же это может привести к нежелательному усложнению конструкции приводного узла.
Данное изобретение ставит перед собой задачу предложить компактный и упрощенный приводной узел для самых различных областей применения, в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом.
Эта задача решается посредством приводного узла с признаками независимого пункта 1 формулы изобретения, посредством гибридного привода с признаками независимого пункта 5, соответственно, посредством летательного аппарата с несущим винтом с признаками независимого пункта 6 формулы изобретения.
Согласно изобретению, в по меньшей мере один сателлит интегрирован первый привод, в частности, электрический привод, благодаря чему внутри планетарной передачи образуется внутренний привод.
В смысле данного изобретения указанный по меньшей мере один сателлит сам выполнен как привод, соответственно, образует по существу первый привод. В качестве существенного отличия от уже известного применения планетарных передач (например, из US 9,797,504 B2) можно отметить, что, согласно данному изобретению, планетарная передача (из-за указанного по меньшей мере одного выполненного как привод сателлита) может теперь работать как приводной узел, соответственно, внутри планетарной передачи образуется внутренний привод.
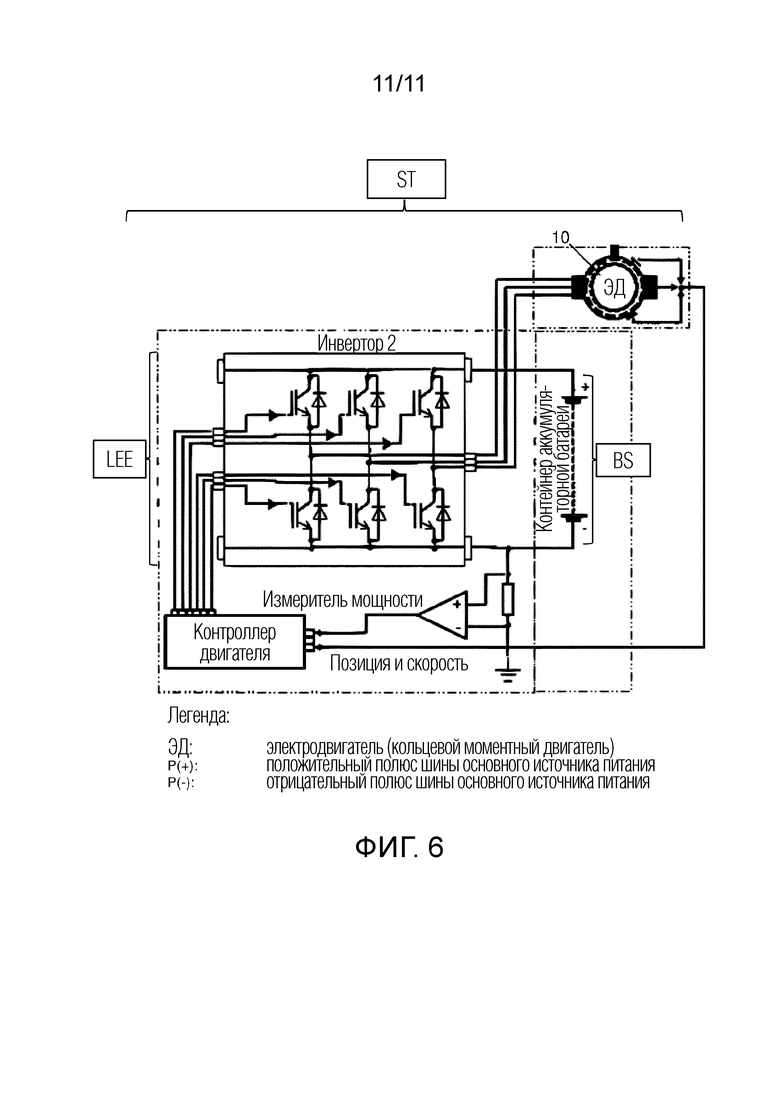
В смысле данного изобретения лишь один единственный сателлит может работать как привод, соответственно, может быть выполнен как привод, причем предпочтительно для оптимального распределения мощности все сателлиты работают как привод. Особенно предпочтительно поэтому, если предлагаемый изобретением приводной узел содержит управляющий блок, выполненный таким образом, чтобы интегрированные в сателлиты приводы синхронизировать друг с другом. Далее, эти интегрированные в сателлиты приводы могут быть выполнены с возможностью механически, электрически или гидравлически отсоединяться друг от друга с помощью подходящей муфты, чтобы предотвратить возможную блокировку передачи из-за некорректной работы одного или нескольких приводов. В смысле данного изобретения указанное управление реализовано как стандартное управление для электрических синхронных двигателей с логической схемой управления и блоком силовой электроники LEE (называемым также «инвертором»). Эта логическая схема управления (контроллер двигателя) вырабатывает соответствующие сигналы, которые управляют инвертором, который затем возбуждает соответствующие обмотки синхронного двигателя, чтобы добиться непрерывного вращения с заданной частотой и крутящим моментом. Синхронизация электрических синхронных двигателей осуществляется посредством определения позиции и скорости вращения якоря, и для каждого электрического синхронного двигателя выполняется индивидуально путем вычисления управляющих сигналов. В этом смысле подходящий вид представлен на Фиг.6.
Согласно одной предпочтительной модификации данного изобретения приводной узел может содержать также одно единственное, т.е. выполненное в виде единственной сплошной конструктивной детали, водило планетарной передачи, причем это водило планетарной передачи содержит по меньшей мере одно, предпочтительно множество приемных отверстий для сателлитов.
Другие предпочтительные варианты выполнения охарактеризованы в зависимых пунктах формулы изобретения.
Предпочтительно сателлитные колеса стационарны и установлены с возможностью вращения вокруг своих соответствующих осей сателлитных колес, причем указанные стационарные сателлитные колеса охвачены зубчатым кольцом с внутренними зубьями, вращающимся вокруг центральной оси приводного узла, и это зубчатое кольцо установлено с возможностью вращения таким образом, что вал, в частности вал несущего винта, приводится во вращение посредством поводка зубчатого кольца, закрепленного на зубчатом кольце и на валу, в частности на валу несущего винта. Благодаря этому создается родственная, сопоставимая форма планетарной передачи. Такие стационарные сателлитные колеса обладают тем преимуществом, что электропитание интегрированного в эти сателлиты привода облегчено за счет электрических питающих линий.
В принципе, однако, в рамках данного изобретения возможна также выполненная в виде эпициклической зубчатой передачи планетарная передача, в которой сателлитные колеса не являются стационарными, т.е. установлены с возможностью вращения, соответственно, обращения вокруг солнечной шестерни. Например, согласно одному такому предпочтительному варианту выполнения подвод тока к интегрированным в сателлиты приводам мог бы осуществляться через контактные кольца.
В принципе возможны любые варианты выполнения первого привода, интегрированного в указанный по меньшей мере один сателлит, причем этот первый привод, например, может быть приводом, выполненным как термодинамический первичный двигатель. Особенно предпочтительно, если первый привод выполнен как электрический регулируемый по частоте вращения и крутящему моменту двигатель, в частности, как электрический синхронный двигатель с внутренней роторной частью. В смысле данного изобретения альтернативно под электрическим регулируемым по частоте вращения и крутящему моменту двигателем может пониматься также, например, асинхронный двигатель, синхронный реактивный двигатель, двигатель с поперечным потоком или т.п.
Альтернативно в рамках данного изобретения возможен к тому же вариант электрического синхронного двигателя с внешним ротором, причем внешний ротор электрического синхронного двигателя соединен с сателлитным колесом без возможности проворачивания. Например, внешний ротор мог бы быть соединен с зубчатым венцом без возможности проворачивания так, что сателлитное колесо и внешний ротор электрического синхронного двигателя лежат в одной и той же плоскости и образуют единый блок. В этом смысле Фиг.5a-5d показывают соответствующий вид.
Предпочтительно первый привод является электрическим приводом, соответственно, электрическим двигателем, причем указанный по меньшей мере один сателлит содержит неподвижную статорную часть, вращающуюся роторную часть, в частности, внутреннюю роторную часть, и по меньшей мере одно опосредованно или непосредственно закрепленное на роторной части сателлитное колесо с внешними зубьями, и этот сателлит при помощи водила планетарной передачи удерживается внутри планетарной передачи, кинематически взаимодействуя с солнечной шестерней и/или вращающимся валом.
Особенно предпочтительно, если планетарная передача предлагаемого изобретением привода содержит по меньшей мере три сателлита, еще предпочтительнее от трех до шести сателлитов. За счет использования по меньшей мере трех сателлитов может быть гарантирована стабильная конструкция планетарной передачи. За счет использования более, чем трех сателлитов предпочтительно обеспечивается модульная конструкция, и различные ступени мощности могут быть изготовлены с низкими затратами с технологической точки зрения. Следующее преимущество состоит в том, что высокая потребляемая мощность за счет модульной конструкции может распределяться на несколько ступеней с более низкой электрической мощностью, благодаря чему за счет получающейся в результате большей поверхности физически и технологически достигается преимущество при отводе тепловых потерь от двигателя и от управления. Дополнительно распределенный на несколько ступеней электрический привод еще лучше защищен от полного отказа общего привода при выходе из строя упомянутого второго привода, выполненного как термодинамический первичный двигатель.
В принципе этот предлагаемый изобретением приводной узел может содержать лишь по меньшей мере один, предпочтительно множество первых электрических приводов, интегрированных каждый в сателлиты, и тем самым может быть выполнен как полностью электрический приводной узел. Следующий аспект данного изобретения касается, однако, гибридного привода, содержащего предлагаемый изобретением приводной узел, причем первый, в частности, электрический привод может быть механически связан со вторым приводом, выполненным как термодинамический первичный двигатель.
Следующий аспект данного изобретения касается летательного аппарата с несущим винтом, содержащего предлагаемый изобретением приводной узел или предлагаемый изобретением гибридный привод.
Предпочтительно указанный по меньшей мере один, предпочтительно указанное множество первых электрических приводов, в частности, указанный электрический синхронный двигатель с внутренней роторной частью, сконструирован так и имеет такие размеры, что несущий винт и/или рулевой винт летательного аппарата с несущим винтом, в частности, вертолета может приводиться в действие автономно без дополнительного привода, и тем самым получается летательный аппарат с несущим винтом с полностью электрическим приводным узлом. В смысле данного изобретения под автономным электрическим приводом понимается, что в зависимости от размеров может выдаваться любая механическая мощность. В отношении механической мощности автономного электрического привода предпочтительно достигается по меньшей мере 150 кВт, предпочтительнее от 200 кВт до 700 кВт, еще предпочтительнее от 300 кВт до 600 кВт, особенно предпочтительно около 600 кВт. В качестве примера с помощью электрического привода мощностью около 600 кВт при низкой частоте вращения 371 об/мин можно получить высокий крутящий момент от около 15'500 Нм или более.
Предпочтительно первый, в частности электрический, привод может быть механически связан со вторым приводом, выполненным как термодинамический первичный двигатель, в частности, за счет того, что центральная солнечная шестерня может приводиться в действие вторым приводным узлом. Предпочтительно второй приводной узел может находиться в механическом взаимодействии с выполненным как термодинамический первичный двигатель вторым приводом или же как другой электрический привод, например, с ДВС, турбинным двигателем, двигателем с принудительным зажиганием, дизельным двигателем, приводом на топливных элементах или т.п. Указанный по меньшей мере электрический привод и указанный второй привод связаны через планетарную передачу, так что электрический привод может поддерживать второй привод при приведении в действие несущего винта и/или рулевого винта и, соответственно, наоборот, и за счет этого образуется гибридный привод.
Предпочтительно вал, соответственно, приводной вал предлагаемого изобретением приводного узла представляет собой вал винта предлагаемого изобретением летательного аппарата с несущим винтом, причем этот вал винта выполнен из двух частей и содержит опорную стойку, а также наружную стойку, причем наружная стойка выполнена как полое тело, установленное с возможностью вращения вокруг центральной оси относительно опорной стойки, концентрично окружая эту опорную стойку, и причем наружная стойка взаимодействует с передачей винта вертолета, выполненной как планетарная передача, причем указанная опорная стойка в летательном аппарате с несущим винтом может быть установлена стационарно и без возможности проворачивания, так что указанная наружная стойка может быть связана без возможности проворачивания с несущим винтом и может приводиться во вращение передачей винта вертолета, выполненной как планетарная передача.
Благодаря такому составному (из двух частей) выполнению приводного вала, соответственно, вала винта может быть получен привод несущего винта с особенно высокой плавностью работы. Посредством такого разделения на опорную стойку и наружную стойку принимается давление от вращающейся опоры, которое затем берет на себя не вращающаяся часть, соответственно, опорнай стойка, так что получается привод с высокой плавностью работы. В дальнейшем предпочтительно было установлено, что во время приведения в действие несущего винта возникает меньший циклический изгиб, и вследствие этого наступает меньшая усталость, чем у выполненных в виде одной детали приводных валов, соответственно, валов винта. Дополнительно может быть обеспечена чрезвычайно компактная компоновка, которая, например, в полом пространстве опорной стойки, позволяет прокладывать кабели, тяги системы управления для размещения автомата перекоса, расположенного над устройством соединения лопастей винта, и других конструктивных частей со стороны приводного механизма на сторону несущего винта. Например, здесь также могут быть расположены электрические питающие линии для электропитания вращающейся системы, например, антиобледенительных устройств для лопастей винта, для ламп в лопастях винта или электрических исполнительных механизмов для электродистанционной системы управления (Fly-by-Wire).
Согласно одному альтернативному предпочтительному варианту выполнения предлагаемого изобретением летательного аппарата с несущим винтом, вал, соответственно, вал винта может быть также выполнен цельно (в виде одной детали) и благодаря этому может обладать другими преимуществами, в частности, в связи с особенно простой и компактной конструкцией.
Предпочтительно приводной вал может быть связан с приводным зубчатым колесом без возможности проворачивания, причем это приводное зубчатое колесо может быть установлено с возможностью вращения на опорной стойке при помощи по меньшей мере одной радиальной опоры, и при помощи центральной солнечной шестерни, соединенной с приводным зубчатым колесом без возможности проворачивания, обеспечивается вращение по меньшей мере одного сателлитного колеса (в частности, нижнего сателлитного колеса при двухступенчатой передаче) на обращенной к солнечной шестерне стороне соответствующего водила планетарной передачи вокруг соответствующей оси сателлитного колеса, и причем по меньшей мере одно сателлитное колесо (в частности, согласованное с нижним сателлитным колесом верхнее сателлитное колесо при двухступенчатой передаче) охвачено вращающимся вокруг центральной оси зубчатым кольцом с внутренними зубьями. Между зубчатым кольцом и наружной стойкой может быть размещен, соответственно, размещен или приформован поводок зубчатого кольца, работающий как передающее усилие устройство, так что от вращательного движения приводного зубчатого колеса может приводиться во вращение наружная стойка и несущий винт, связанный с наружной стойкой без возможности проворачивания.
Предпочтительно в предлагаемом изобретением летательном аппарате с несущим винтом предлагаемый изобретением приводной узел содержит источник электрической энергии, в частности, аккумуляторную батарею, причем первый привод в форме электрического привода предлагаемого изобретением гибридного привода в связанном без возможности проворачивания состоянии между электрическим приводом и вторым приводом, выполненным как термодинамический первичный двигатель, и во время работы второго привода указанный по меньшей мере один первый электрический привод, предпочтительно множество первых электрических приводов могут работать как генератор для дополнительной выработки энергии для аккумуляторной батареи.
Предпочтительно в предлагаемом изобретением летательном аппарате с несущим винтом, в частности, вертолете в первом электрическом приводе предусмотрен выпрямитель, в частности, в форме запирающего диода, благодаря чему в нерабочем режиме электрического привода указанная аккумуляторная батарея может заряжаться.
Предпочтительно в предлагаемом изобретением летательном аппарате с несущим винтом логическая схема управляющего блока выполнена таким образом, что она в дальнейшем позволяет автоматическую смену режима между выработкой крутящего момента для приведения в действие винта и дополнительной рекуперацией энергии для аккумуляторной батареи.
Предпочтительные примеры осуществления предмета изобретения описываются ниже в связи с прилагаемыми чертежами. На чертежах показано следующее.
Фиг.1а вид в продольном разрезе первого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с двухступенчатой планетарной передачей в качестве гибридного варианта, в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом;
Фиг.1b вид сверху первого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с установленным корпусом передачи;
Фиг.1c вид в перспективе первого предпочтительного варианта выполнения предлагаемого изобретением приводного узла без корпуса передачи;
Фиг.1d вид в перспективе первого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с корпусом передачи;
Фиг.2a вид в продольном разрезе второго предпочтительного варианта выполнения предлагаемого изобретением приводного узла с двухступенчатой планетарной передачей в качестве гибридного варианта с расположенным внутри зубчатым кольцом с внешними зубьями;
Фиг.2b вид сверху второго предпочтительного варианта выполнения предлагаемого изобретением приводного узла с установленным корпусом передачи;
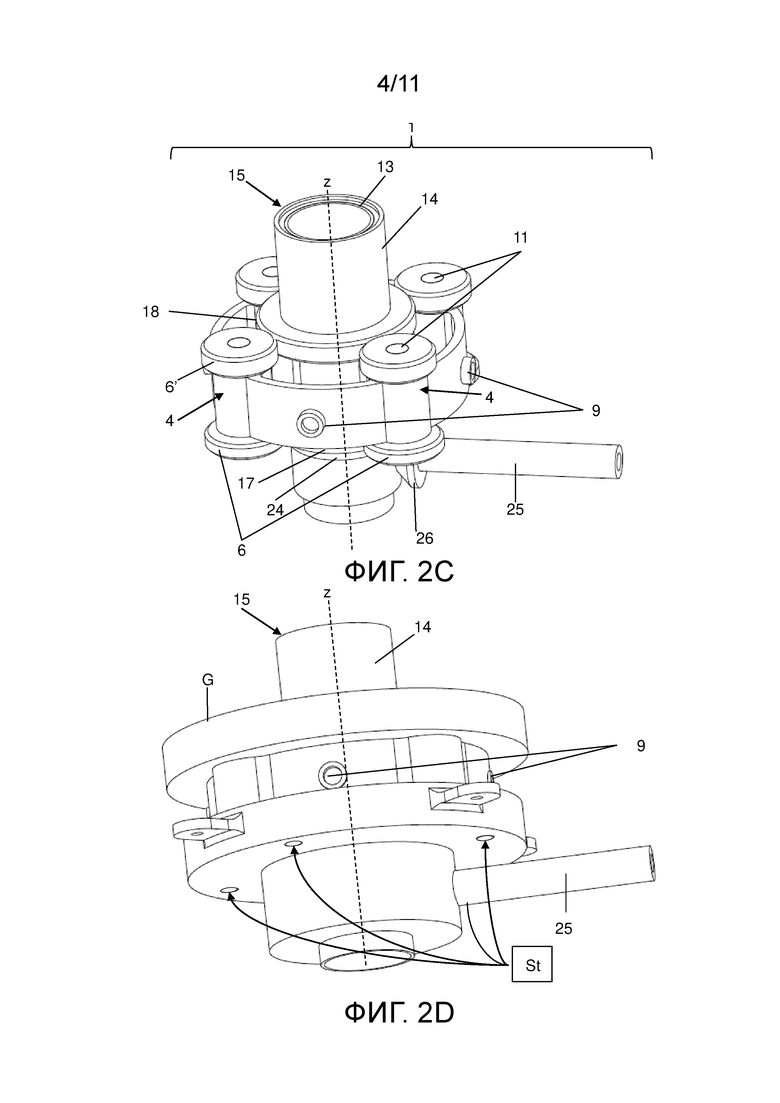
Фиг.2c вид в перспективе второго предпочтительного варианта выполнения предлагаемого изобретением приводного узла без корпуса передачи;
Фиг.2d вид в перспективе второго предпочтительного варианта выполнения предлагаемого изобретением приводного узла с корпусом передачи;
Фиг.3a вид в продольном разрезе третьего предпочтительного варианта выполнения предлагаемого изобретением приводного узла с одноступенчатой планетарной передачей в качестве варианта полностью электрического привода, в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом;
Фиг.3b вид сверху третьего предпочтительного варианта выполнения предлагаемого изобретением приводного узла с установленным корпусом передачи;
Фиг.3c вид в перспективе третьего предпочтительного варианта выполнения предлагаемого изобретением приводного узла без корпуса передачи;
Фиг.3d вид в перспективе третьего предпочтительного варианта выполнения предлагаемого изобретением приводного узла с корпусом передачи;
Фиг.4a вид в продольном разрезе четвертого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с одноступенчатой планетарной передачей в качестве варианта полностью электрического привода, а также с расположенным внутри зубчатым кольцом с внешними зубьями, в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом;
Фиг.4b вид сверху четвертого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с установленным корпусом передачи;
Фиг.4c вид в перспективе четвертого предпочтительного варианта выполнения предлагаемого изобретением приводного узла без корпуса передачи;
Фиг.4d вид в перспективе четвертого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с корпусом передачи;
Фиг.5a вид в продольном разрезе пятого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с одноступенчатой планетарной передачей в качестве варианта полностью электрического привода, а также в качестве варианта с внешним ротором;
Фиг.5b вид сверху пятого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с установленным корпусом передачи;
Фиг.5c вид в перспективе пятого предпочтительного варианта выполнения предлагаемого изобретением приводного узла без корпуса передачи;
Фиг.5d вид в перспективе пятого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с корпусом передачи;
Фиг.6 функциональная блок-схема управления приводной мощностью интегрированных в сателлиты первых приводов предпочтительных вариантов выполнения предлагаемого изобретением приводного узла.
На Фиг.1а показан вид в продольном разрезе по линии A-A (см. Фиг.1b) первого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с многоступенчатой, здесь двухступенчатой, планетарной передачей PI, например, для приведения в действие не показанного здесь несущего винта летательного аппарата с несущим винтом (см. в связи с этим, в частности, Фиг.3).
Выполненный здесь как двухступенчатая планетарная передача PI, предлагаемый изобретением приводной узел 1 содержит центральную солнечную шестерню 17 и несколько сателлитов 4, прилегающих к не показанным здесь внешним зубьям солнечной шестерни 17. Указанная солнечная шестерня 17 охватывается прилегающими сателлитами 4, причем сателлиты 4 установлены внутри планетарной передачи PI концентрично солнечной шестерне 17 и центральной оси z. При этом сателлит 4 включает в себя нижнее сателлитное колесо 6, верхнее сателлитное колесо 6' и соединяющую сателлитные колеса 6; 6' без возможности проворачивания внутреннюю роторную часть 11 для образования двух ступеней здесь двухступенчатой планетарной передачи PI, а также статорную часть 12.
Показанный здесь, первый предпочтительный вариант выполнения имеет вал 15, который выполнен из двух частей, включающих в себя опорную стойку 13, а также наружную стойку 14. С помощью наружной стойки 14, соответственно, вала 15 может приводиться в действие, например, несущий винт летательного аппарата с несущим винтом или гребной винт или т.п. Предлагаемый изобретением приводной узел 1, приводящий в действие вал 15, может применяться в самых различных областях техники. Другими словами, эта передача, соответственно, планетарная передача PI предлагаемого изобретением приводного узла может также рассматриваться как передача 30 с преобразованием крутящего момента.
На уровне, соответственно, на одной и той же аксиальной позиции верхних сателлитных колес 6' расположено зубчатое кольцо 19, вращающееся вокруг центральной оси z. Это зубчатое кольцо 19 охватывает все верхние сателлитные колеса 6', может приводиться в действие за счет вращения верхних сателлитных колес 6' и, тем самым, вращаться вокруг центральной оси z. На зубчатом кольце 19 расположены не показанные здесь внутренние зубья, которые входят в зацепление с не показанными здесь внешними зубьями 5 верхних сателлитных колес 6' (если они выполнены, как показано на Фиг.1а, в двухступенчатой форме).
Механическое кинематическое взаимодействие между верхними сателлитными колесами 6' и вращающейся вокруг центральной оси z наружной стойкой 14 имеется для приведения в действие этой наружной стойки 14 указанного вала 15.
В данном, первом предпочтительном варианте выполнения это механическое взаимодействие реализуется за счет соединенного без возможности проворачивания с наружной стойкой валом 14 поводка 20 зубчатого кольца. Другими словами, поводок 20 зубчатого кольца, который расположен также на зубчатом кольце 19, работает как передающее силу устройство, при помощи которого вращение зубчатого кольца 19 может передаваться на вращаемую наружную стойку 14.
Как можно видеть на Фиг.1а, в по меньшей мере один сателлит 4 интегрирован первый электрический привод 2, здесь это, в частности, электрический синхронный двигатель 10 с внутренней роторной частью 11, для образования первого приводного узла 1, так что вал 15 может приводиться во вращение посредством первого привода 2. Работающая в качестве статора синхронного двигателя 10, здесь по существу кольцеобразная и снабженная обмотками W статорная часть 12 здесь помещена в водило 5 планетарной передачи и жестко соединена с водилом 5 планетарной передачи. Работающая как ротор синхронного двигателя 10, стержнеобразная внутренняя роторная часть 11 соединена без возможности проворачивания с верхними и нижними сателлитными колесами 6; 6'. Сателлит 4 при помощи водила 5 внутри планетарной передачи PI взаимодействует с солнечной шестерней 17 и вращающимся валом 15, и здесь удерживается стационарно.
В показанном на Фиг.1а электрическом синхронном двигателе 10 силовое воздействие синхронного двигателя 10 возникает в воздушном зазоре, соответственно, в магнитном зазоре M между статорной частью 12 (статором) и внутренней роторной частью 11 (ротором).
Как видно на Фиг.1а, с приводным зубчатым колесом 24 соединена выполненная как полый вал солнечная шестерня 17, причем эта солнечная шестерня 17 имеет не показанные здесь внешние зубья. Солнечная шестерня 17 и приводное зубчатое колесо 24 установлены на опорной стойке 13 с возможностью вращения вокруг центральной оси z. При помощи солнечной шестерни 17 через нижнее сателлитное колесо 6 может обеспечиваться вращение сателлитного колеса 6' вокруг соответствующей оси P сателлитного колеса.
Приводное зубчатое колесо 24 в свою очередь находится во взаимодействии с по меньшей мере одной приводной ветвью 25 через зубчатое колесо 26 приводной ветви. Предпочтительно здесь эта приводная ветвь 25 находится в механическом взаимодействии с не показанным здесь, еще одним выполненным как термодинамический первичный двигатель приводом TK для образования гибридного привода, соответственно, гибридного варианта, включающего в себя предлагаемый изобретением приводной узел 1.
Ниже будет рассмотрено в качестве примера применение гибридного варианта, согласно первому предпочтительному варианту выполнения приводного узла 1, для приведения в действие несущего винта летательного аппарата с несущим винтом (причем указанные со второго по пятый предпочтительные варианты выполнения точно так же пригодны для приведения в действие несущего винта летательного аппарата с несущим винтом).
При этом указанная передача 30 с преобразованием крутящего момента предлагаемого изобретением приводного узла 1 может рассматриваться здесь как выполненная в виде планетарной передачи PI главная передача, соответственно, передача вертолетного винта летательного аппарата с несущим винтом.
Вал 15, соответственно, здесь вал винта выполнен из двух частей, включающих в себя опорную стойку 13, а также наружную стойку 14.
Передача вертолетного винта имеет центральное полое пространство. В этом центральном полом пространстве установлена здесь стационарная и не имеющая возможности проворачивания опорная стойка 13. Центральная ось z образует одновременно продольное направление опорной стойки 13 и ось вращения наружной стойки 14.
Механическое кинематическое взаимодействие между здесь стационарными и установленными с возможностью вращения вокруг своей оси P сателлитными колесами 6;6' и вращающимся вокруг центральной оси z валом 15, т.е. здесь включающим в себя опорную стоку 13, а также трубчатую наружную стойку 14, охватывающую эту опорную стойку 13, реализуется, за счет того, что указанные стационарные верхние сателлитные колеса 6' охвачены вращающимся вокруг центральной оси z зубчатым кольцом 19 с внутренними зубьями, и это зубчатое кольцо 19 вращается так, что наружная стойка 14 указанного вала 15 может приводиться во вращение при помощи закрепленного на зубчатом кольце 19 и на наружной стойке 14 поводка 20 зубчатого кольца.
Как видно на Фиг.1а, в по меньшей мере один сателлит 4 интегрирован первый, электрический привод 2, здесь, в частности, электрический синхронный двигатель 10 с внутренней роторной частью 11, для образования первого приводного узла 1, так что наружная стойка 14 вала 15 может приводиться во вращение посредством первого привода 2. Работающая как статор синхронного двигателя 10 статорная часть 12 здесь помещена в водило 5 планетарной передачи и жестко соединена с водилом планетарной передачи, тогда как работающая как ротор синхронного двигателя 10 стержнеобразная внутренняя роторная часть 11 соединена без возможности проворачивания с верхними и нижними сателлитными колесами 6; 6'.
Показанный на Фиг.1а-1d, пригодный для летательного аппарата с несущим винтом соответственно, вертолета первый предпочтительный вариант выполнения предлагаемого изобретением приводного узла 1 в рамках этого применения имеет преимущества, в частности, в отношении безопасности. В чрезвычайной ситуации в виде выхода из строя одного привода такого многомоторного вертолета этот вертолет должен иметь возможность оставаться на мощности от других оставшихся двигателей на заданный промежуток времени, чтобы перевести этот вертолет в безопасный режим полета и отреагировать на выход двигателя из строя.
Предпочтительно в показанном на Фиг.1а первом предпочтительном варианте выполнения указанная приводная ветвь 25 тоже находится в механическом взаимодействии с не показанным здесь, другим приводом TK, выполненным как термодинамический первичный двигатель, для образования гибридного привода. При этом наряду со вторым приводом TK, выполненным как термодинамический первичный двигатель, первый, здесь электрический, привод 2, а также соответствующий источник электрической энергии могут совершать дополнительную механическую работу. Такие вертолеты с гибридным приводом предпочтительно предлагают дополнительное преимущество по безопасности по сравнению с двухмоторными вертолетами, имеющими снабжение только ископаемым топливом, так как, например, при выходе из строя системы снабжения ископаемым топливом они могут переключаться на дополнительное электропитание.
За счет интеграции первого привода 2, в частности, электрического синхронного двигателя, в сателлиты 4 получается исключительно компактный гибридный привод для двухмоторного вертолета (например, в смысле вертолета отличающегося типа).
Как можно видеть на Фиг.1а, опорная стойка выполнена здесь как полое тело, так что конструктивные части, такие как тяги системы управления для размещения расположенного над устройством соединения лопастей винта автомата перекоса и/или прокладки кабелей, могут располагаться проходя насквозь в направлении центральной оси z сквозь опорную стойку 13 и наружную стойку 14. Например, и здесь тоже питающие электрические линии для электропитания могут быть размещены на вращающейся системе, например, антиобледенительные устройства для лопастей винта, лампы в лопастях винта или электрические исполнительные механизмы для электродистанционной системы управления.
Начиная с этого момента и далее одинаковые ссылочные позиции на чертежах относятся к одинаковым компонентам.
На Фиг.1b показан вид сверху первого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с установленным корпусом G передачи.
На Фиг.1c показан вид в перспективе первого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 без корпуса, соответственно, с удаленным корпусом. Показанный на Фиг.1c первый предпочтительный вариант выполнения здесь в качестве примера имеет четыре сателлита 4.
На Фиг.1d показан вид в перспективе первого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с корпусом G. При этом приводной узел 1 содержит управляющий блок ST, который выполнен так, чтобы синхронизировать друг с другом интегрированные в сателлиты 4 первые приводы 2. Эта синхронизация интегрированных в сателлиты 4 первых приводов 2 точнее показана на Фиг.6.
Далее, эти интегрированные в сателлиты приводы 2 могут быть выполнены с возможностью отсоединяться друг от друга механически, электрически или гидравлически при помощи не показанной здесь, походящей муфты, чтобы предотвратить возможную блокировку передачи из-за некорректной работы одного или нескольких приводов.
Далее, согласно Фиг.1d, указанный приводной узел 1 содержит источник электрической энергии, в частности, показанную здесь аккумуляторную батарею BS, и причем первый привод 2 здесь в форме электрического привода указанного гибридного привода в связанном без возможности проворачивания состоянии между первым, здесь электрическим, приводом 2 и вторым приводом TK, выполненным как термодинамический первичный двигатель. Во время работы второго привода TK первый, здесь электрический, привод 2 может работать как генератор и обеспечивать дополнительную рекуперацию (выработку) энергии для аккумуляторной батареи BS.
Предпочтительно в первом, в частности, электрическом, приводе 2, в частности, в электрическом синхронном двигателе с внутренней роторной частью 11 предусмотрен выпрямитель, в частности, в форме запирающего диода, благодаря чему в нерабочем режиме электрического привода аккумуляторная батарея BS может заряжаться.
Кроме того, управляющий блок ST может быть снабжен, далее, логической схемой, которая делает возможной автоматическую смену режима между выработкой крутящего момента для приведения в действие несущего винта и дополнительной рекуперацией энергии для аккумуляторной батареи BS.
Показанный на Фиг.1а-1d первый предпочтительный вариант выполнения, другими словами, гибридный вариант включает в себя предлагаемый изобретением приводной узел 1. За счет выполнения планетарной передачи PI двухступенчатой предпочтительно может устанавливаться оптимальное высокое передаточное отношение, тогда как одновременно обеспечиваются преимущества гибридного привода (например, преимущества по безопасности при применении в летательном аппарате с несущим винтом).
Согласно одной предпочтительной модификации данного изобретения эта планетарная передача может быть выполнена также более, чем двухступенчатой, например, трехступенчатой и т.п.
На Фиг.2a показан вид в продольном разрезе по линии A-A (см. Фиг. 2b) второго предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с двухступенчатой планетарной передачей PI в качестве гибридного варианта с расположенным внутри зубчатым кольцом 18 с внешними зубьями.
Выполненный здесь как двухступенчатая планетарная передача PI предлагаемый изобретением приводной узел 1 содержит центральную солнечную шестерню 17 и несколько сателлитов 4, прилегающих к не показанным здесь внешним зубьям солнечной шестерни 17 и охватывающих солнечную шестерню 17, причем сателлиты 4 расположены внутри планетарной передачи PI концентрично солнечной шестерне 17 и центральной оси z.
Как показано на Фиг.2a, расположенное внутри, снабженное внешними зубьями, а также соединенное с наружной стойкой 14 без возможности проворачивания зубчатое кольцо 18 здесь охватывается верхними сателлитными колесами 6' и точно так же может приводиться в действие за счет вращения верхних сателлитных колес 6', и тем самым, может вращаться вокруг центральной оси z и приводиться во вращение вместе с наружной стойкой 14. На зубчатом кольце 18 имеются не показанные здесь внешние зубья, которые входят в зацепление с не показанными здесь внешними зубьями верхних сателлитных колес 6'.
На Фиг.2b показан вид сверху второго предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с установленным корпусом G передачи.
На Фиг.2c показан вид в перспективе второго предпочтительного варианта выполнения предлагаемого изобретением приводного узла без корпуса передачи.
На Фиг.2d показан вид в перспективе второго предпочтительного варианта выполнения предлагаемого изобретением приводного узла с корпусом G передачи.
На Фиг.3a показан вид в продольном разрезе по линии A-A (см. Фиг. 3b) третьего предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с одноступенчатой планетарной передачей PI, например, для приведения в действие показанного здесь несущего винта летательного аппарата с несущим винтом.
Как можно увидеть на Фиг.3a, в показанном здесь третьем предпочтительном варианте выполнения отказываются от солнечной шестерни (как и в показанном на Фиг.4a-4d четвертом и, соответственно, в показанном на Фиг.5a-5d пятом предпочтительных вариантах выполнения), что соответствует, тем самым, передаче, сходной с планетарной передачей PI. Этот возможный отказ от солнечной шестерни дает преимущество в снижении веса, а также в уменьшении сложности конструкции.
Применение такой одноступенчатой планетарной передачи PI обладает тем преимуществом, что в показанном здесь третьем предпочтительном варианте выполнения не требуется размещать никакого внешнего корпуса G передачи, проходящего по двум ступеням, и за счет этого интегрированный в сателлит 4 первый, здесь выполненный как электрический синхронный двигатель 10 с внутренней роторной частью 11 привод 2 может лучше охлаждаться. В частности, вплоть до определенной мощности тепловые потери могут быть достаточно малыми, чтобы исключить контур жидкостного охлаждения, и поэтому не требуется никакого жидкостного охлаждения, т.е. имеющееся воздушное охлаждение с помощью окружающего воздуха вокруг сателлитов 4 уже вызывает достаточное охлаждение. Кроме того, оказалось, что при модульной конструкции электрического привода на несколько ступеней с низкой электрической мощностью указанная мощность без необходимого жидкостного охлаждения выше, чем при единственном, электрическом приводе.
На Фиг.3b показан вид сверху третьего предпочтительного варианта выполнения предлагаемого изобретением приводного узла с установленным корпусом G передачи.
На Фиг.3c показан вид в перспективе третьего предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 без корпуса, соответственно, с удаленным корпусом. Показанный здесь третий предпочтительный вариант выполнения в качестве примера имеет шесть сателлитов 4.
На Фиг.3d показан вид в перспективе третьего предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с корпусом G передачи.
На Фиг.3a-3d, относящихся к третьему предпочтительному варианту выполнения с одноступенчатой планетарной передачей PI, показан полностью электрический вариант предлагаемого изобретением приводного узла 1, причем точно так же возможен и гибридный вариант, включающий в себя выполненный как одноступенчатая планетарная передача PI приводной узел 1. Под одноступенчатой планетарной передачей PI понимается, что сателлиты 4 включают в себя только верхнее сателлитное колесо 6' и, тем самым, имеют лишь одну ступень.
В принципе возможен к тому же еще более простой вариант выполнения предлагаемого изобретением привода, причем крутящий момент может передаваться не через зубчатое кольцо 19 с внутренними зубьями, а через зубчатое кольцо 18, снабженное внешними зубьями (см. Фиг.2a-2d, соответственно, Фиг.4a-4d).
На Фиг.4a показан вид в продольном разрезе четвертого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с одноступенчатой планетарной передачей в качестве варианта полностью электрического привода, а также с расположенным внутри зубчатым кольцом, снабженным внешними зубьями, в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом.
Как показано на Фиг.4a, здесь зубчатое кольцо 18, расположенное внутри и снабженное внешними зубьями, а также соединенное с наружной стойкой 14 без возможности проворачивания, охвачено верхними сателлитными колесами 6' и может приводиться в действие тоже за счет вращения этих верхних сателлитных колес 6' и вращаться вместе с наружной стойкой 14 вокруг центральной оси z.
На Фиг.4b показан вид сверху четвертого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с установленным корпусом G передачи.
На Фиг.4c показан вид в перспективе четвертого предпочтительного варианта выполнения предлагаемого изобретением приводного узла без корпуса передачи.
На Фиг.4d показан вид в перспективе четвертого предпочтительного варианта выполнения предлагаемого изобретением приводного узла с корпусом G передачи.
На Фиг.5a показан вид в продольном разрезе по линии A-A (см. Фиг.5b) пятого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с одноступенчатой планетарной передачей PI в качестве варианта полностью электрического привода, а также в качестве варианта с внешним ротором.
Как можно видеть на Фиг.5a, в по меньшей мере один сателлит 4 интегрирован первый, здесь электрический привод 2, здесь, в частности, электрический синхронный двигатель 10 с внешней роторной частью 16 для образования первого приводного узла 1.
Работающая как статор синхронного двигателя 10, здесь, по существу, кольцевая и снабженная обмотками W неподвижная статорная часть 12 размещена здесь в стержнеобразном элементе S и жестко соединена с этим стержнеобразным элементом S, тогда как работающая здесь как ротор синхронного двигателя 10, внешняя роторная часть 16 электрического синхронного двигателя соединена здесь без возможности проворачивания с сателлитным колесом 6. Сателлитное колесо 6 и внешняя роторная часть 16 электрического синхронного двигателя 10 лежат здесь в одной и той же плоскости, соответственно, в одной и той же аксиальной позиции и образую по существу единый блок.
Как можно видеть на Фиг.5a, здесь стационарные сателлитные колеса 6' сателлитов 4, с одной стороны, охватываются вращающимся вокруг центральной оси z зубчатым кольцом 19 с внутренними зубьями, а, с другой стороны, расположенное внутри, снабженное внешними зубьями зубчатое кольцо 18 охвачено сателлитными колесами 6', причем с помощью зубчатого кольца 19 с внутренними зубьями может приводиться во вращение не показанная здесь наружная стойка 14 (см. Фиг.5b), а с помощью расположенного внутри, снабженного внешними зубьями зубчатого кольца 18 может приводиться во вращение другой, здесь не показанный, центральный приводной вал (см. Фиг. 5b). Другими словами, согласно пятому предпочтительному варианту выполнения два вала могут приводиться во вращение с различными передаточными отношениями. Кроме того, на Фиг.5a указано, что в случае одного здесь тоже возможного выполнения гибридного варианта указанное снабженное внешними зубьями зубчатое кольцо 18 может работать как солнечная шестерня 17.
На Фиг.5b показан вид сверху пятого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с установленным корпусом G передачи, а также в кинематическом взаимодействии с наружной стойкой 14, соответственно, с центральным приводным валом 27. Как можно видеть на Фиг.5b, зубчатое кольцо 19 с внутренними зубьями может через множество соединительных элементов V находиться в кинематическом взаимодействии с наружной стойкой 14, соответственно, с валом 15. Альтернативно или дополнительно снабженное внешними зубьями зубчатое кольцо 18, соответственно, солнечная шестерня 17 через множество соединительных элементов V может находиться в кинематическом взаимодействии с центральным приводным валом 27, в частности, в качестве варианта выполнения гибридного привода.
Далее, на Фиг.5b показано, что в случае выполнения привода в негибридном варианте, соответственно, в полностью электрическом варианте в смысле другой предпочтительной модификации расположенное внутри зубчатое кольцо 18, снабженное внешними зубьями, может находиться в кинематическом взаимодействии с наружной стойкой.
На Фиг.5c показан вид в перспективе пятого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 без корпуса передачи, центрального приводного вала и наружной стойки. Как показано на Фиг.5c, водило 5 планетарной передачи через консоли 9 здесь без возможности проворачивания и стационарно соединено с работающим как опорная стойка 13 донным элементом B. Кроме того, здесь опорная стойка 13 содержит расположенный по центру, коаксиально центральной оси z трубчатый элемент R для другого вала, закрепленного на зубчатом кольце 18.
Кроме того, на Фиг.5c можно видеть, что здесь водило 5 планетарной передачи выполнено как единственная сплошная, по существу, кольцевая конструктивная деталь, в которой стационарно удерживаются сателлиты 4.
На Фиг.5d показан вид в перспективе пятого предпочтительного варианта выполнения предлагаемого изобретением приводного узла 1 с корпусом G передачи, однако, без центрального приводного вала и без наружной стойки. Как видно на Фиг.5d, здесь консоли 9 одновременно служат для закрепления корпуса G передачи.
Показанный на Фиг.5a-5d пятый предпочтительный вариант выполнения предлагаемого изобретением приводного узла 1 имеет особенно компактную конструкцию, при которой размещаемая, вращающаяся наружная стойка 14 может быть выполнена укороченной на снабженное внешними зубьями зубчатое кольцо 18 или на снабженное внутренними зубьями зубчатое кольцо 19 таким образом, что она может быть помещена по существу на той же аксиальной позиции, что и сателлиты 4. В случае применения для летательного аппарата с несущим винтом приводной узел 1 в принципе мог бы быть размещен прямо в плоскости винта.
На Фиг.6 показана функциональная блок-схема управления приводной мощностью интегрированных в сателлиты P первых приводов 2.
Как показано в качестве примера на Фиг.1d, Фиг.2d, Фиг.3d, Фиг.4d и Фиг.5d, указанный приводной узел 1 содержит управляющий блок ST, который выполнен таким образом, что можно эксплуатировать друг с другом и синхронизировать друг с другом интегрированные в сателлиты P первые приводы 2.
В смысле данного изобретения это управление реализовано как стандартное управление для электрических синхронных двигателей 10 с логической схемой управления и блоком силовой электроники LEE (здесь называется также «инвертором»). Эта логическая схема управления (здесь обозначается также как «контроллер двигателя») производит соответствующие сигналы, которые управляют инвертором, который затем возбуждает соответствующие обмотки электрического синхронного двигателя 10, чтобы обеспечить непрерывное вращение с заданной частотой и крутящим моментом. Синхронизация электрических синхронных двигателей 10 возможна за счет определения позиции и скорости вращения якоря, и для каждого электрического синхронного двигателя 10 индивидуально путем вычисления управляющих сигналов.
Перечень ссылочных позиций
1 приводной узел
2 первый привод
4 сателлит
5 водило планетарной передачи
6; 6' нижнее/верхнее сателлитное колесо
7 электрические питающие линии
9 консоли (для закрепления водила 5 планетарной передачи на корпусе G передачи)
10 электрический синхронный двигатель
11 внутренняя роторная часть (электрического синхронного двигателя)
12 статорная часть
13 опорная стойка
14 наружная стойка
15 вал
16 внешняя роторная часть (электрического синхронного двигателя)
17 солнечная шестерня
18 (расположенное внутри, снабженное внешними зубьями) зубчатое кольцо
19 (расположенное снаружи, снабженное внутренними зубьями) зубчатое кольцо
20 поводок зубчатого кольца
24 центральное приводное зубчатое колесо
25 приводная ветвь
26 зубчатое колесо приводной ветви
27 центральный приводной вал
30 редуктор с преобразованием крутящего момента
B донный элемент
BS аккумуляторная батарея
G корпус передачи
M магнитный зазор
P ось сателлитного колеса
PI планетарная передача
R трубчатый элемент
S стержнеобразный элемент
ST управляющий блок
TK второй привод, выполненный как термодинамический первичный двигатель
V соединительные элементы
W обмотки (статорной части)









Изобретение относится к летательным аппаратам. Приводной узел для приведения в действие несущего винта летательного аппарата с несущим винтом, содержит планетарную передачу, которая включает в себя несколько сателлитов. Каждый сателлит передачи имеет сателлитное колесо с зубьями, и эти сателлиты расположены внутри планетарной передачи концентрично центральной оси, так что вращаемый вал винта летательного аппарата приводится в действие при помощи сателлитов или солнечной шестерни. В по меньшей мере один сателлит интегрирован первый электропривод, благодаря чему образуется внутренний привод внутри планетарной передачи так, что вал винта приводится во вращение посредством первого привода. Повышается компактность привода. 3 н. и 10 з.п. ф-лы, 21 ил.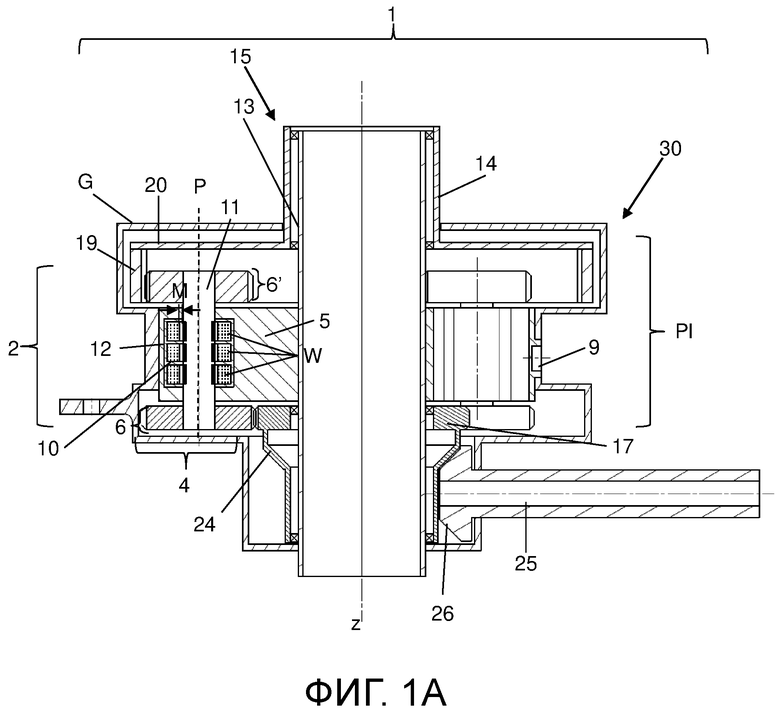
1. Приводной узел (1), в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом, содержащий:
планетарную передачу (PI), причем эта планетарная передача (PI) включает в себя несколько сателлитов (4), причем каждый сателлит (4) имеет по меньшей мере одно сателлитное колесо (6;6') с зубьями, и эти сателлиты (4) расположены внутри планетарной передачи (PI) концентрично центральной оси (z), так что вращаемый вал (15), в частности вал винта летательного аппарата с несущим винтом, выполнен с возможностью приведения в действие при помощи сателлитов (4) или солнечной шестерни (17),
отличающийся тем, что
в по меньшей мере один сателлит (4) интегрирован первый привод (2), в частности электрический привод, благодаря чему образуется внутренний привод внутри планетарной передачи (PI), так что упомянутый вал (15) выполнен с возможностью приведения во вращение посредством первого привода (2).
2. Приводной узел (1), в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом, по п.1, отличающийся тем, что первый привод (2) выполнен как электрический регулируемый по частоте вращения и крутящему моменту двигатель, в частности как электрический синхронный двигатель (10) с внутренней роторной частью (11).
3. Приводной узел (1), в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом, по п.1 или 2, отличающийся тем, что первый привод (2) является электрическим приводом, причем указанный по меньшей мере один сателлит (4) содержит неподвижную статорную часть (12), вращающуюся роторную часть, и указанное по меньшей мере одно закрепленное опосредованно или непосредственно на роторной части сателлитное колесо (6;6') с внешними зубьями, и этот сателлит (4) при помощи водила (5) планетарной передачи внутри планетарной передачи (PI) кинематически взаимодействует с солнечной шестерней (17) и/или с вращающимся валом (15).
4. Приводной узел (1), в частности, для приведения в действие несущего винта летательного аппарата с несущим винтом, по любому из предыдущих пунктов, отличающийся тем, что сателлитные колеса (6;6') установлены стационарно и с возможностью вращения вокруг своих осей (P) сателлитного колеса, и что эти стационарные сателлитные колеса (6;6') охвачены вращающимся вокруг центральной оси (z) зубчатым кольцом (19) с внутренними зубьями, и/или расположенное внутри, снабженное внешними зубьями зубчатое кольцо (18) охвачено нижними и/или верхними сателлитными колесами (6;6'), и это зубчатое кольцо (19) и/или снабженное внешними зубьями зубчатое кольцо (18) выполнены с возможностью вращения таким образом, что вал (15), в частности вал винта, может приводиться во вращение при помощи закрепленного на зубчатом кольце (19) и на валу (15), в частности на валу винта, поводка (20) зубчатого кольца, и/или вал (15), в частности вал винта, может приводиться во вращение при помощи снабженного внешними зубьями зубчатого кольца (18).
5. Гибридный привод, включающий в себя приводной узел (1) по любому из предыдущих пунктов, причем первый, в частности электрический, привод (2) механически связан со вторым приводом (TK), выполненным как термодинамический первичный двигатель или как другой электрический привод, и находящимся вне планетарной передачи (PI).
6. Летательный аппарат с несущим винтом, содержащий приводной узел по любому из пп.1-4 или гибридный привод по п.5.
7. Летательный аппарат с несущим винтом по п.6, отличающийся тем, что указанный по меньшей мере один, предпочтительно множество первых электрических приводов (2) сконструированы таким образом, что несущий винт и/или рулевой винт летательного аппарата с несущим винтом, в частности вертолета, могут приводиться во вращение автономно без дополнительного привода.
8. Летательный аппарат с несущим винтом с гибридным приводом (1) по п.6 или 7, отличающийся тем, что первый, в частности, электрический привод (2) может механически связываться со вторым, выполненным как термодинамический первичный двигатель приводом (TK), в частности, за счет того, что центральная солнечная шестерня (17) может приводиться в действие посредством второго приводного узла, и что этот второй приводной узел соединен со вторым приводом (TK), выполненным как термодинамический первичный двигатель, и находится в механическом взаимодействии, например, с ДВС, турбинным двигателем, двигателем с принудительным зажиганием, дизельным двигателем или приводом на топливных элементах, так что указанный по меньшей мере один первый, в частности электрический, привод (2) и указанный второй привод (TK) связаны через планетарную передачу (PI), указанный электрический привод (2) может поддерживать второй привод (TK) при приведении в действие несущего винта и/или рулевого винта и, соответственно, наоборот, и за счет этого образуется гибридный привод.
9. Летательный аппарат с несущим винтом, в частности вертолет, по любому из пп.6-8, отличающийся тем, что вал (15) представляет собой вал винта летательного аппарата с несущим винтом, причем этот вал винта выполнен из двух частей и включает в себя опорную стойку (13), а также наружную стойку (14), причем наружная стойка (14) выполнена как полое тело, установленное с возможностью вращения вокруг центральной оси (Z) относительно опорной стойки (13), концентрично окружая опорную стойку (13), и причем наружная стойка (14) выполнена с возможностью взаимодействия с выполненной как планетарная передача (PI) передачей вертолетного винта, причем опорная стойка (13) может быть установлена стационарно и без возможности проворачивания в летательном аппарате с несущим винтом, так что наружная стойка (14) может быть без возможности проворачивания связана с несущим винтом и может приводиться во вращение выполненной как планетарная передача (PI) передачей вертолетного винта.
10. Летательный аппарат с несущим винтом, в частности вертолет, по п.9, отличающийся тем, что вал, в частности вал винта, может быть связан с приводным зубчатым колесом (24) без возможности проворачивания, причем приводное зубчатое колесо (24) может быть установлено на опорной стойке (13) с возможностью вращения посредством по меньшей мере одной радиальной опоры, и при помощи соединенной с приводным зубчатым колесом (24) без возможности проворачивания, центральной солнечной шестерни (17) может обеспечиваться вращение по меньшей мере одного нижнего сателлитного колеса (6) на обращенной к приводному зубчатому колесу (24) стороне соответствующего водила (5) планетарной передачи вокруг соответствующей оси (P) сателлитного колеса, и причем по меньшей мере одно, относящееся к указанному по меньшей мере одному нижнему сателлитному колесу (6), установленное стационарно верхнее сателлитное колесо (6') охвачено вращающимся вокруг центральной оси (Z) зубчатым кольцом (19) с внутренними зубьями, и между зубчатым кольцом (19) и наружной стойкой (14) сформирован или может помещаться работающий как передающее усилие устройство поводок (20) зубчатого кольца таким образом, что от вращательного движения приводного зубчатого колеса (24) могут приводиться во вращение наружная стойка (14) и связанный с наружной стойкой (14) без возможности проворачивания несущий винт.
11. Летательный аппарат с несущим винтом, в частности, вертолет, по любому из пп.6-10, отличающийся тем, что приводной узел (1) содержит источник электрической энергии, в частности аккумуляторную батарею (BS), и причем первый привод в форме электрического привода (2) указанного гибридного привода в связанном без возможности проворачивания состоянии между первым, в частности электрическим, приводом (2) и вторым, выполненным как термодинамический первичный двигатель приводом (TK) и во время работы этого второго привода (TK) указанный первый, электрический привод (2) может работать как генератор для дополнительной рекуперации энергии для аккумуляторной батареи (BS).
12. Летательный аппарат с несущим винтом, в частности вертолет, по п.11, отличающийся тем, что в первом электрическом приводе (2) предусмотрен выпрямитель, в частности, в форме запирающего диода, благодаря чему в нерабочем режиме электрического привода (2) аккумуляторная батарея (BS) может заряжаться.
13. Летательный аппарат с несущим винтом, в частности вертолет, по п.11 или 12, отличающийся тем, что логическая схема управляющего блока (ST) обеспечивает автоматическую смену режима между выработкой крутящего момента для приведения в действие винта и дополнительной рекуперацией энергии для аккумуляторной батареи (BS).
| US 2012329593 A1, 27.12.2012 | |||
| CN 108082499 A, 29.05.2018 | |||
| CN 108773263 A, 09.11.2018 | |||
| CN 108215765 A, 29.06.2018 | |||
| ЭЛЕКТРОПРИВОДНОЕ УСТРОЙСТВО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2011 |
|
RU2547938C2 |
| ЭЛЕКТРОПРИВОД С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2478849C2 |

