Изобретение относится к области оптических измерительных систем, в частности к устройствам регистрации вибрации и перемещений различных объектов.
Задача контроля вибрации и перемещения объектов имеет большое значение в различных областях науки и техники. Данная задача важна при работе высокоточного оборудования различного назначения, где необходимо контролировать среднее положение и уровень вибрации элементов на субмикронном уровне. Например, такая задача стоит в ультрапрецизионных обрабатывающих центрах, в технологическом оборудовании микроэлектроники, а также во многих других.
В настоящее время предложено большое количество различных вариантов контроля малых вибраций, как оптических, так и электронных. Основной недостаток электронных необходимость контакта с объектом и малый динамический диапазон. Это обусловило активное внедрение оптических методов.
Наиболее простым в реализации являются триангуляционные методы. Известно устройство, описанное в документе WO 2016201465 («Optical triangulation sensor for distance measurement)), МПК G01S 17/48, G01S 7/481, публ. 22.12.2016 г.), в котором изменение расстояния до объекта приводит к смещению пятна на детекторе. Основной недостаток данной схемы - низкая точность, особенно при повышении частоты вибраций.
Другим распространенным методом регистрации является автодинная интерферометрия. Известно устройство, описанное в патенте RU 2461803 («Способ бесконтактного измерения нановибраций поверхности)), МПК G01H 9/00, H01S 3/08, публ. 20.09.2012 г.), в котором свет от гелий-неонового лазера после отражения от контролируемого объекта направлялся назад в резонатор лазера. Это приводило к модуляции мощности и фазы излучения лазера, которые зависят от расстояния до отражающего объекта. Недостатком данного подхода является зависимость автодинного сигнала от величины обратной связи и неоднозначность измерений, связанная с периодической зависимостью автодинного сигнала от расстояния до контролируемого объекта.
В патенте CN 104236464 «Laser vibration displacement sensor and measuring method thereof)) (МПК G01B 11/02, публ. 24.12.2014 г.) описано устройство, объединяющее триангуляционную и автодинную методики, в котором часть света отражается назад в лазер, а часть рассеивается вбок и попадает на триангуляционный канал. В этом случае удается устранить неоднозначность измерений по расстоянию, но точность абсолютных измерений все равно остается низкой.
Наибольшее распространение получили лазерные доплеровские виброметры. Например, в патенте RU 2610905 «Лазерный измеритель скорости и/или перемещения малоразмерных объектов в местах с ограниченным доступом» (МПК G01S 17/58, публ. 17.02.2017 г.) описано устройство измерителя перемещения малоразмерных объектов с помощью лазерной доплеровской интерферометрии. В таких устройствах свет, отраженный от движущейся поверхности, сдвигается по частоте на величину, пропорциональную скорости перемещения поверхности в силу эффекта Доплера. Далее, с помощью интерферометрической схемы, производится сложение исходной волны и отраженной и, в результате, происходит модуляция интенсивности света на разностной частоте. Измерение данной частоты позволяет определить скорость перемещения объекта, что, в свою очередь, может быть пересчитано в закон движения. Недостатком данного устройства является невозможность измерения абсолютного расстояния до объекта.
Одним из методов, позволяющих измерять расстояние до объектов с высокой точностью, является низкокогерентная интерферометрия. В патенте JP 5264172 («Optical sensor using low-coherence interferometry», G01B 9/02023, публ. 14.08.2013 г.) описано устройство, выбранное за прототип, позволяющее измерять абсолютное расстояние от оптоволоконного зонда до отражающей поверхности. В данном устройстве зазор оптоволокно-поверхность последовательно оптически соединяется с опорным интерферометром, выполненным по поляризационной схеме. А прием осуществляется на ПЗС матрицу. Изменение зазора между оптоволокном и поверхностью приводит к сдвигу интерференционного сигнала на матрице, что далее фиксируется с помощью системы обработки. Основной недостаток такой схемы - низкое быстродействие, ограниченное быстродействием ПЗС матрицы, что позволяет измерять только медленные перемещения.
Задачей, на решение которой направлено предлагаемое изобретение, является разработка устройства, осуществляющего регистрацию одновременно как перемещений объекта, так и его малых вибраций относительно текущего положения в широком частотном диапазоне.
Технический результат достигается за счет того, что разработанное устройство так же, как и устройство-прототип, включает в себя широкополосный источник света, перестраиваемый опорный интерферометр, сенсорный интерферометр, приемник и блок обработки сигналов. Новым является то, что устройство содержит эталонный интерферометр со вторым приемником, соединенным с блоком обработки сигналов, причем на выходе опорного интерферометра установлен мультиплексор, выходы которого соединены с эталонным и сенсорным интерферометрами, а в блоке обработки сигналов вычисляется одновременно как величина изменения разности длин плеч опорного интерферометра между моментами появления максимумов низкокогерентных интерференционных сигналов, так и разность фаз интерференционных сигналов, полученных с пар опорный интерферометр сенсорный интерферометр и опорный интерферометр эталонный интерферометр.
В частном случае реализации разработанного устройства опорный интерферометр выполнен по схеме Майкельсона на дискретных элементах.
В другом частном случае реализации разработанного устройства опорный интерферометр может быть изготовлен из оптического волокна, намотанного на пьезокерамическую катушку, на которую осуществляется подача напряжения.
Предлагаемое изобретение поясняется следующими фигурами.
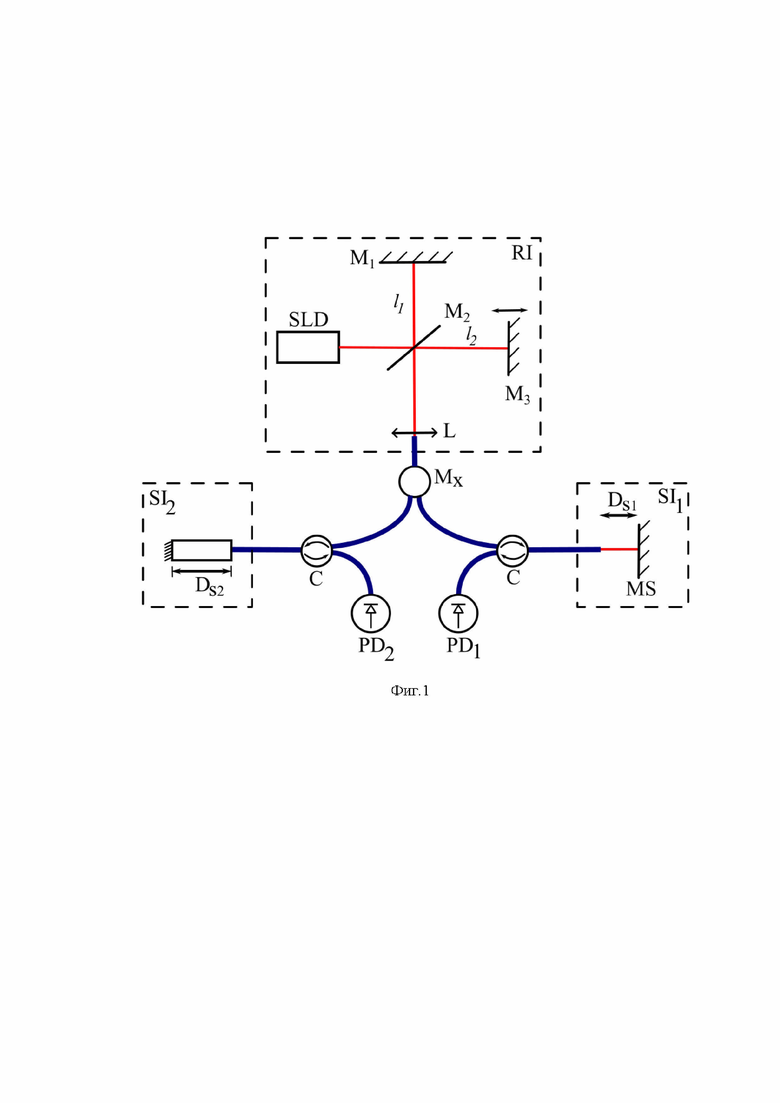
На фиг. 1 представлена схема разработанного устройства регистрации перемещений объекта и вибраций его поверхности в соответствии с п. 2 формулы изобретения.
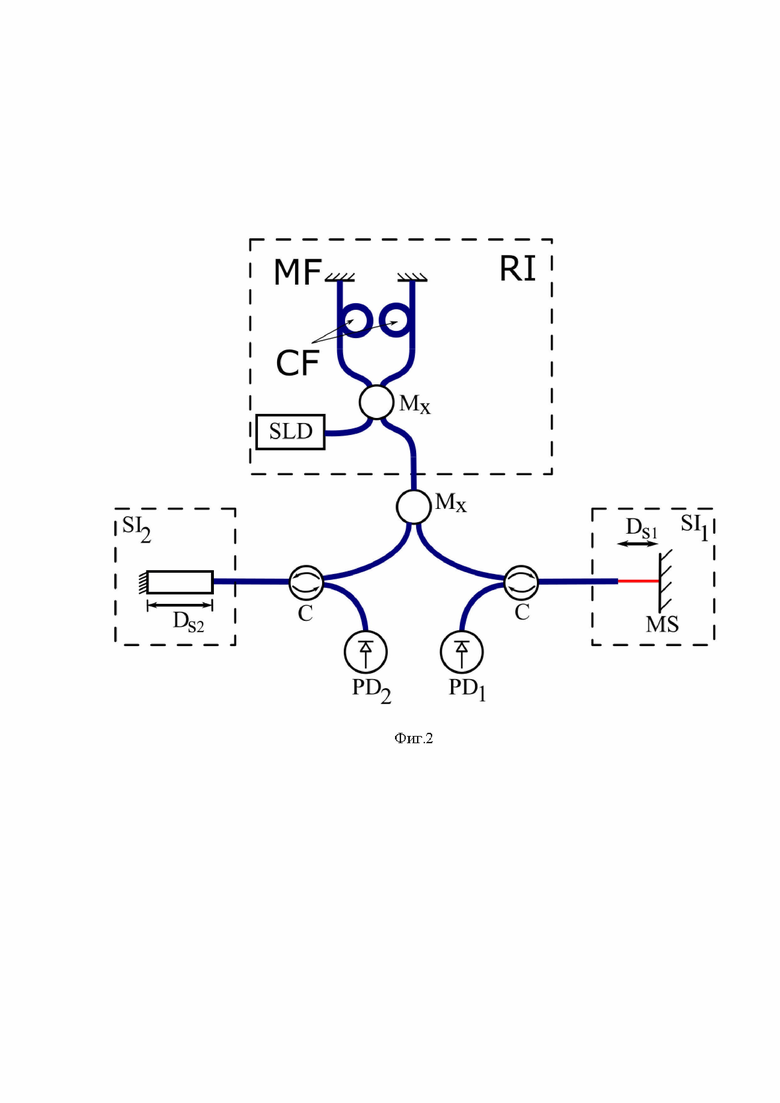
На фиг. 2 представлена схема разработанного устройства в соответствии с п. 3 формулы изобретения.
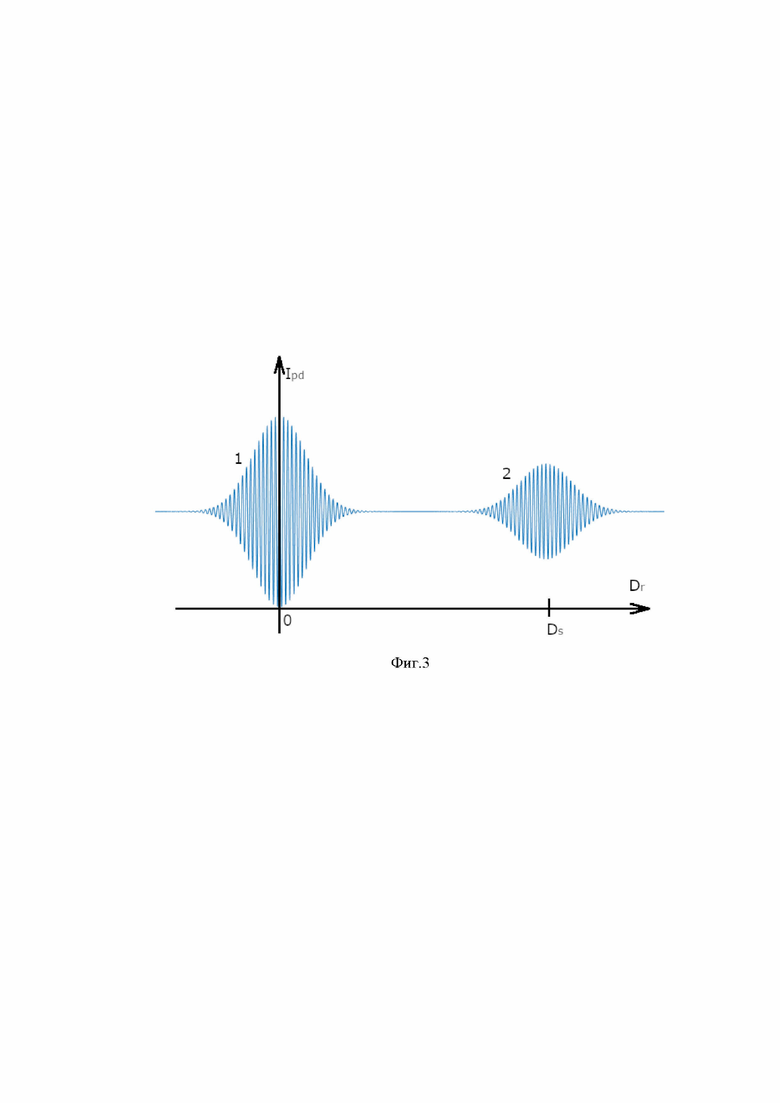
На фиг. 3 приведена форма регистрируемых сигналов, получаемых при изменении разности длин плеч опорного интерферометра.
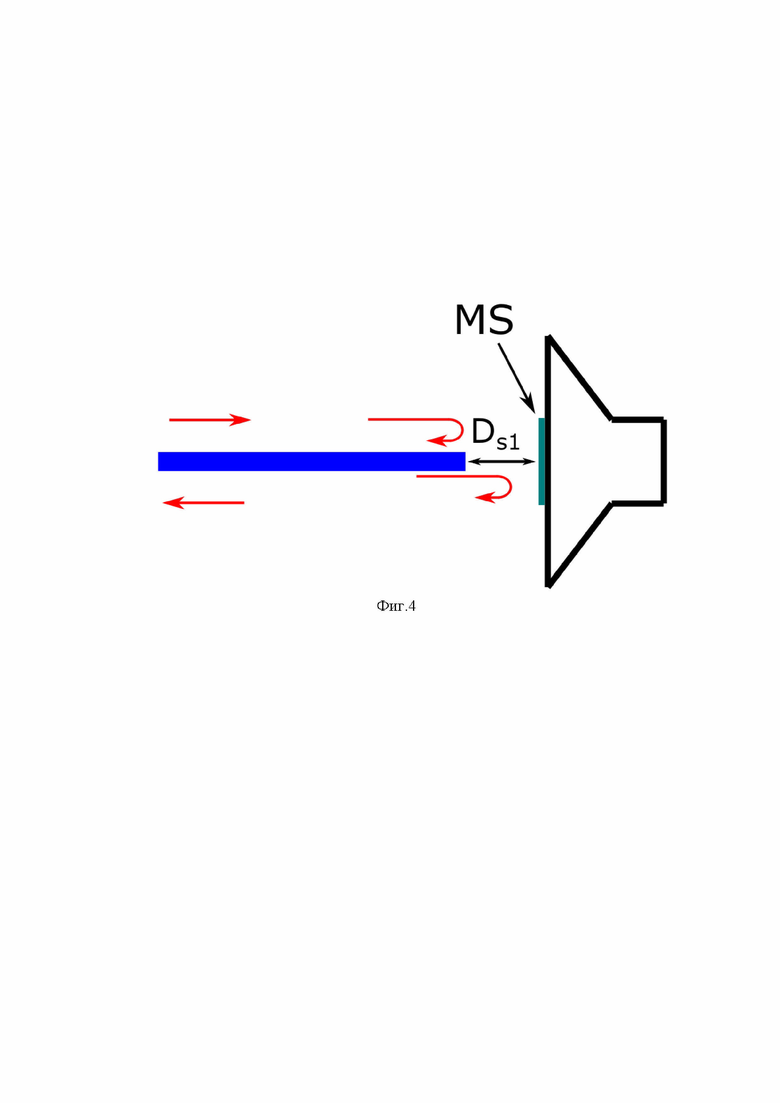
На фиг. 4 приведена схема тестового объекта.
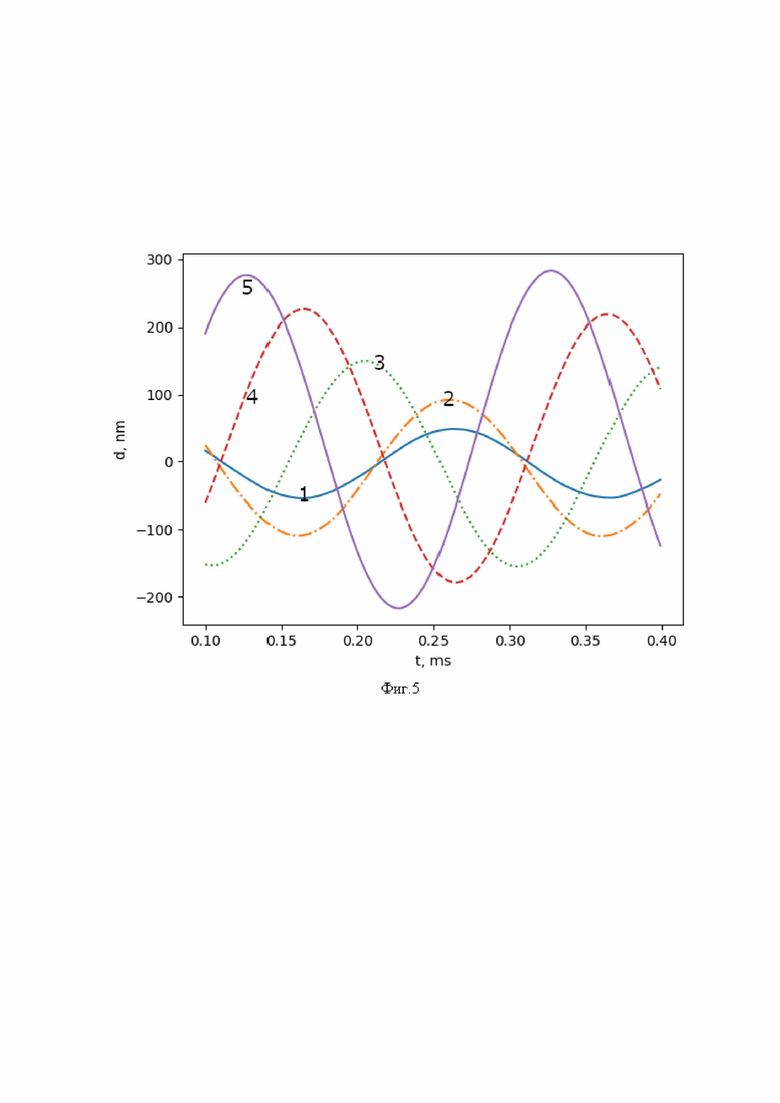
На фиг. 5 приведены результаты измерения колебаний зеркала для различной амплитуды модулирующего напряжения.
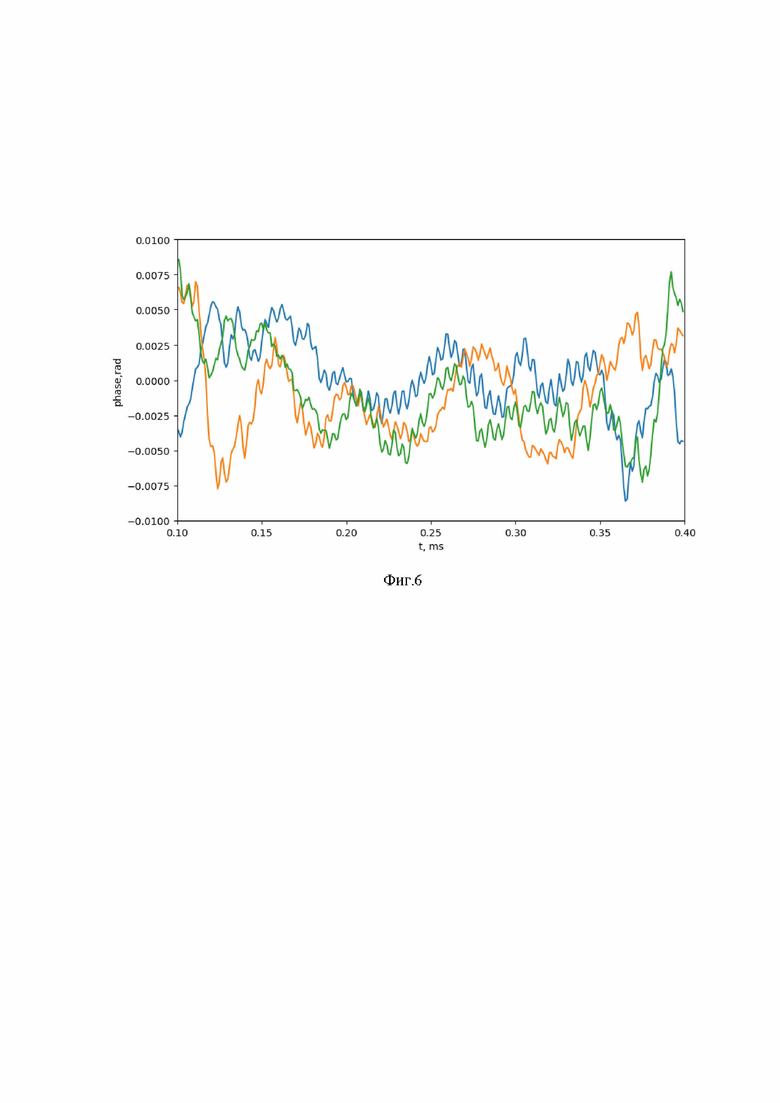
На фиг. 6 приведены собственные шумы схемы.
Указанные фигуры поясняют изобретение, но не ограничивают его.
Схема предлагаемого изобретения приведена на фиг. 1. Как и прототип, устройство содержит широкополосный источник света SLD, опорный интерферометр RI, сенсорный интерферометр SI1, приемник PD1 и блок обработки сигналов. Известно, что в низкокогерентной схеме с двумя связанными интерферометрами, как в устройстве-прототипе, при использовании источника с гауссовым спектром, сигнал на выходе имеет вид:

где Lcoh=c/(πΔν) - длина когерентности источника,
k=2π/λ0 - волновой вектор,
λ0 - центральная длина волны источника,
I0 интенсивность света,
Dr и Ds - оптические разности хода в опорном и сенсорном интерферометрах, соответственно,
b некоторый коэффициент, который определяется параметрами системы, такими как, коэффициенты отражения зеркал и потери в элементах.
При этом максимум сигнала, соответствующий первому слагаемому в (1) (сигнал 1 на фиг. 3), находится в положении Dr=0, то есть при нулевой разности длин плеч опорного интерферометра, а второй максимум сигнала (сигнал 2 на фиг. 3), соответствующий второму слагаемому, возникает при Dr - Ds=0, то есть при равенстве задержек в опорном и сенсорном интерферометрах. Следовательно, определение величины Dr в момент наблюдения максимума второго интерференционного пика позволяет определить Ds, что позволяет измерять абсолютное расстояние от опорной поверхности до контролируемого объекта, что, в свою очередь, позволяет отслеживать перемещение объекта. Данный результат хорошо известен. Однако такой подход ограничивает максимальную скорость сбора данных частотой развертки опорного интерферометра, что не позволяет наблюдать быстропротекающие процессы, в том числе высокочастотную вибрацию объекта.
Пусть зеркало М3 в опорном интерферометре RI перемещается с постоянной скоростью V:

где Dr0 стартовая разность длин плеч.
Пусть при этом зеркало Ms сенсорного интерферометра колеблется по некоторому закону:

где Ds0 - некоторая константа, определяющая начальную (невозмущенную) толщину сенсорного интерферометра, |ΔDs(t)| < Lcoh, и |Ds0 - Dr(t)| < Lcoh. В этом случае интенсивность на фотоприемнике PDi будет иметь вид:

где I01 определяется коэффициентами отражения и потерями в элементах.
При этом первым слагаемым в (1) можно пренебречь, если Ds0, Dr0 » Lcoh. Тогда с учетом (2) и (3), выражение для интенсивности (4) примет вид:

Если скорость модуляции сенсорного интерферометра мала по сравнению со скоростью движения зеркала в опорном интерферометре, то есть

то (5) представляет собой узкополосный сигнал (сигнал 2 на фиг. 3). В этом случае мы можем разделить медленную огибающую сигнала и быстрые осцилляции интенсивности внутри него (фиг. 3). Для вычисления фазы сигнала можно использовать любой метод. Мы воспользуемся методом, основанным на преобразовании Гильберта. Если у нас есть узкополосный сигнал вида:

где A(t), ϕ(t) являются медленно изменяющимися функциями по сравнению с cos(ωt), то преобразование Гильберта изменит такой сигнал на

где Н{…} обозначает преобразование Гильберта.
Тогда можно записать:

где unwrap() обозначает операцию устранения скачков фазы на 2π, возникающих после выполнения операции arctan.
Тогда для сигнала (5) операция (9) даст:

Слагаемое Dr0 - Ds0 является постоянным фазовым сдвигом и в нашем случае не играет роли. Слагаемое Vt - это линейный тренд фазы, определяемый скоростью сканирования опорного интерферометра, а последнее слагаемое - это колебания толщины сенсорного интерферометра, которые мы хотим измерить. В случае высокостабильного узла сканирования опорного интерферометра, т.е. при V=const, линейный тренд Vt может быть просто удален за счет постобработки. Таким образом, мы будем измерять ΔDs(t), что и является целью.
Основная проблема такого подхода заключается в том, что для реальных сканирующих устройств V может быть непостоянной и иметь некоторые случайные изменения во времени, что приведет к ошибкам в измерениях.
Данная проблема устраняется в предлагаемом изобретении путем введения дополнительного эталонного интерферометра SI2 (см. фиг. 1, фиг. 2) с модификацией алгоритма обработки.
Сигнал суперлюминесцентного диода SLD поступает в опорный интерферометр RI и, проходя через мультиплексор Мх, разделяется и попадает в сенсорный интерферометр SI1 и в эталонный интерферометр SI2. Сенсорный интерферометр SI1 представляет собой интерферометр, в котором задержка между интерферирующими волнами равна DS1. Сенсорный интерферометр SI1 образован торцом оптического волокна и глухим зеркалом MS. Эталонный интерферометр SI2 изготавливается таким образом, чтобы задержка между интерферирующими волнами DS2 отличалась от DS1 на величину меньше, чем длина когерентности источника. При этом конструкция SI2 должна обеспечивать стабильность DS2 во времени, то есть флуктуации DS2 должны быть меньше, чем требуемая точность измерений. Например, DS2 можем представлять собой кварцевую пластинку нужной длины, помещенную в термостатированный корпус.
Выходя из интерферометров SI1 и SI2, сигналы, проходя через свой соответствующий циркулятор С, попадают на фотоприемники PD1 и PD2, а затем в блок обработки сигналов.
По п. 2 ф-лы (фиг. 1) опорный интерферометр RI выполнен по схеме Майкельсона на дискретных элементах и представляет собой непрозрачное зеркало M1, непрозрачное подвижное зеркало М3, полупрозрачное зеркало Мг, объектив для ввода излучения в оптическое волокно L, длины плеч опорного интерферометра h и Ь.
По п. 3 ф-лы (фиг. 2) опорный интерферометр RI выполнен из оптического волокна, намотанного на пьезокерамическую катушку, на которую осуществляется подачи напряжения. Мх - мультиплексор, CF - катушка оптоволокна, MF - волоконное зеркало.
Пусть скорость сканирования зеркала Мз опорного интерферометра RI имеет вид:

где ΔV(t) - случайные колебания скорости сканирования.
Тогда сигналы с фото приемников PD1 и PD2 будут соответственно равны:
После вычисления фазы по алгоритму (9) получим:

Возьмем разность фаз сигналов на фотоприемниках PD1 и PD2 (фотодиодах):

Слагаемое Ds10 - Ds20 - константа, и может быть получено близким к нулю за счет подстройки Ds2q. В результате результирующая фаза полностью определяется только колебаниями толщины сенсорного интерферометра SI1 и не зависит от параметров движения зеркала М3 опорного интерферометра RI.
Таким образом, предложенный алгоритм позволяет контролировать вибрацию объектов, одновременно отслеживая их толщину путем контроля положения максимума огибающей сигнала, как описано в прототипе. При этом важно, что, поскольку фаза в (16) однозначно привязана к длине волны источника как:

то данная схема позволяет проводить абсолютные измерения без дополнительной калибровки.
Для проверки работоспособности предложенного устройства была собрана установка, в которой опорный интерферометр RI был выполнен по схема Майкельсона (н.п. 2 ф-лы), а сенсорный интерферометр SI1 был образован торцом волокна и зеркалом MS, закрепленном на акустическом динамике согласно фиг. 4. Эталонный интерферометр SI2 представлял собой две кварцевых пластинки с зажатым кварцевым кольцом между ними. Такая конструкция обеспечивала высокую стабильность эталонного интерферометра SI2.
На динамик подавалось синусоидальное напряжение различной частоты и амплитуды. Для верификации системы динамик предварительно калибровался с помощью лазерной интерферометрии.
На фиг. 5 приведены результаты измерения колебаний зеркала тестового объекта, приведенного на фиг. 4, для различной амплитуды модулирующего напряжения.
При частоте модулирующего напряжения ƒs=5 kHz амплитуда модулирующего напряжения UG равна: 1) UG=1 V, 2) UG=2 V, 3) UG=3 V, 4) UG=4 V, 5) UG=5 V.
На фиг. 6 приведены собственные шумы системы для случая, когда в качестве сенсорного интерферометра SI1 выступает стабильный эталон. Видно, что собственный шум системы меньше ± 0,01 рад, что для длин волны 1310 нм, в соответствии с (17), составляет менее ± 1 нм.
Опорный интерферометр RI может быть выполнен по различным схемам. В частности может быть выполнен в полностью волоконном исполнении, что делает систему заметно более компактной и надежной по сравнению с реализацией на дискретных элементах.
Таким образом, заявленное устройство регистрации перемещений объекта и вибраций его поверхности позволяет регистрировать абсолютное расстояние и вибрацию отражающих поверхностей, а также может использоваться для детектирования сигналов с произвольных интерференционных волоконно-оптических датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕРФЕРОМЕТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ И ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ ПРОЗРАЧНЫХ ОБЪЕКТОВ | 2006 |
|
RU2313066C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ОБЪЕКТА И ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240502C1 |
| Устройство регистрации малых изменений длины интерференционных волоконно-оптических сенсоров | 2023 |
|
RU2824305C1 |
| ИНТЕРФЕРОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОЛЩИНЫ | 1998 |
|
RU2147728C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЯ ПОВЕРХНОСТИ | 2003 |
|
RU2245515C2 |
| ИНТЕРФЕРОМЕТРИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2004 |
|
RU2273823C1 |
| ИНТЕРФЕРОМЕТРИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2005 |
|
RU2307318C1 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОЙ КОГЕРЕНТНОЙ ТОМОГРАФИИ, ОПТОВОЛОКОННОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ДИАГНОСТИКИ БИОТКАНИ IN VIVO | 1998 |
|
RU2148378C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА | 2003 |
|
RU2247938C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ КАПИЛЛЯРНОГО КРОВОТОКА | 2002 |
|
RU2231286C1 |
Изобретение относится к области оптических измерительных систем, в частности к устройствам регистрации вибрации и перемещений различных объектов. Устройство включает в себя широкополосный источник света с малой длиной когерентности, опорный интерферометр, сенсорный интерферометр, эталонный интерферометр, приемники и блок обработки сигналов, в котором вычисляется одновременно как величина изменения разности длин плеч опорного интерферометра между моментами появления максимумов низкокогерентных интерференционных сигналов, так и разность фаз интерференционных сигналов, полученных с пар опорный интерферометр - сенсорный интерферометр и опорный интерферометр - эталонный интерферометр. Устройство позволяет регистрировать как абсолютные перемещения контролируемой поверхности, так и высокочастотные вибрации. 2 з.п. ф-лы, 6 ил.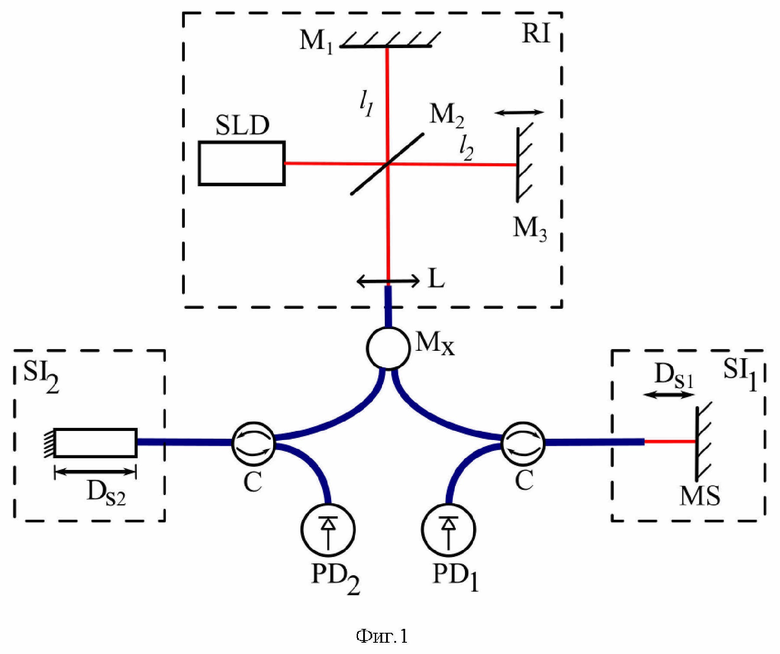
1. Устройство регистрации перемещений объекта и вибраций его поверхности, включающее в себя широкополосный источник света, опорный интерферометр, сенсорный интерферометр, приемник и блок обработки сигналов, отличающееся тем, что устройство содержит эталонный интерферометр со вторым приемником, соединенным с блоком обработки сигналов, причем на выходе опорного интерферометра установлен мультиплексор, выходы которого соединены с эталонным и сенсорным интерферометрами, а в блоке обработки сигналов вычисляется одновременно как величина изменения разности длин плеч опорного интерферометра между моментами появления максимумов низкокогерентных интерференционных сигналов, так и разность фаз интерференционных сигналов, полученных с пар опорный интерферометр – сенсорный интерферометр и опорный интерферометр – эталонный интерферометр.
2. Устройство по п.1, отличающееся тем, что опорный интерферометр выполнен по схеме Майкельсона на дискретных элементах.
3. Устройство по п.1, отличающееся тем, что опорный интерферометр выполнен из оптического волокна, намотанного на пьезокерамическую катушку, на которую осуществляется подача напряжения.
| US 2011109911 A1, 12.05.2011 | |||
| Способ определения фибриногена при рекальцификации цитратной плазмы и оценка его функциональности | 2019 |
|
RU2703541C1 |
| CN 115235602 A, 25.10.2022. | |||

