ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к области техники установок, предназначенных для транспортировки пассажиров или оборудования с помощью подвесных канатов, в частности механическими подъемниками, используемыми на горнолыжных курортах, такими как гондолы, кресельные подъемники и бугельные подъемники.
[0002] Более конкретно, настоящее изобретение также относится к системе для определения местоположения неисправности на электрической линии безопасности, проходящей вдоль такой канатной транспортной установки.
УРОВЕНЬ ТЕХНИКИ
[0003] В качестве хорошо известного средства, канатная транспортная установка включает в себя по меньшей мере одну так называемую электрическую линию безопасности, с которой последовательно соединено множество предохранительных электрических контактов для каната, распределенных вдоль указанной транспортной установки. Эти предохранительные контакты расположены, например, на уровне различных опор установки и приводятся в действие посредством механических детекторов неисправности, которые обнаруживают неполадку с канатом вследствие его схода с направляющей на опоре с помощью, например, разрушаемых предохранительных стержней.
[0004] Как только один из предохранительных контактов размыкается, что означает, например, сход каната с направляющей, целостность линии безопасности нарушается, и таким образом обеспечивается возможность быстрого останова транспортной установки по очевидным причинам, связанным с безопасностью.
[0005] Однако при возникновении подобной неисправности важно иметь возможность как можно более точного определения местоположения этой неисправности, с тем чтобы можно было как можно быстрее ее устранить и таким образом минимизировать время отключения сооружения. Однако транспортная установка с подвесными канатами проходит на значительное расстояние и имеет значительное количество опор, доступ к которым может быть затрудненным и требующим значительных затрат времени, особенно в горах. Таким образом, важно иметь систему, которая помогает операторам определить местоположение неисправности.
[0006] Уже имеются решения, которые помогают определять местоположение неисправности каната. Например, в документе EP0180501 описано устройство, в котором определение местоположения осуществляется путем измерения времени, необходимого для прохождения электрическим сигналом расстояния между передатчиком электрического сигнала, расположенным, например, на базовой станции или в блоке безопасности, и детектором неисправности. Однако такая система может становиться менее точной и менее надежной с течением времени, в частности, вследствие износа и повреждений устройства.
[0007] Еще одно решение, известное из документа FR 2504482, состоит в параллельном соединении каждого предохранительного контакта с резистором, сопротивление которого заранее определено и является специфическим для местоположения предохранительного контакта в пределах установки. При размыкании одного из аварийных контактов общее сопротивление линии безопасности изменяется в соответствии со значением сопротивления разомкнутого контакта. Путем измерения изменения напряжения на линии безопасности, обеспечивается возможность определения сопротивления указанного параллельного резистора и таким образом обеспечивается возможность идентификации неисправного контакта. Однако такая система тоже является неточной для протяженных установок с многочисленными предохранительными контактами. В дополнение, поскольку необходимо параллельное соединение отдельного резистора с каждым аварийным контактом, обслуживание такой системы является сложным. Кроме того, подобная система перестала бы функционировать, если бы одновременно возникли две неисправности.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0008] По этой причине, настоящее изобретение имеет целью устранение всех или части из указанных недостатков предыдущего уровня техники путем обеспечения простого и надежного решения для определения местоположения неисправности каната в транспортной установке.
[0009] С этой целью в настоящем изобретении предложена система для определения местоположения неисправности в канатной транспортной установке, содержащая блок безопасности, оконечный модуль и электрическую линию безопасности, соединяющую блок безопасности и оконечный модуль, а также содержащую множество предохранительных контактов для каната, которые представляют собой контакты нормально замкнутого типа, соединены последовательно вдоль линии безопасности и при своем размыкании сигнализируют о неисправности каната в транспортной установке. Система для определения местоположения отличается тем, что она включает в себя множество модулей для определения местоположения, которые распределены вдоль транспортной установки и каждый из которых содержит первый тестовый контакт нормально разомкнутого типа, обеспечивающий возможность короткого замыкания линии безопасности, и тем, что после обнаружения неисправности по сигналу от одного из аварийных контактов, каждый модуль для определения местоположения способен к выборочному замыканию своего первого тестового контакта таким образом, чтобы обеспечить возможность определения местоположения указанного предохранительного контакта на линии безопасности.
[0010] Согласно признаку, каждый модуль для определения местоположения также содержит второй тестовый контакт нормально замкнутого типа, включенный последовательно вдоль линии безопасности. После обнаружения неисправности в виде короткого замыкания на линии безопасности, каждый модуль для определения местоположения способен выборочно размыкать свой второй тестовый контакт таким образом, чтобы обеспечить возможность определения местоположения указанной неисправности в виде короткого замыкания на линии безопасности.
[0011] Согласно еще одному признаку, блок безопасности содержит средства обнаружения неисправности каната и неисправности в виде короткого замыкания, происходящего на линии безопасности.
[0012] Согласно еще одному признаку, блок безопасности содержит средства связи с модулями для определения местоположения с целью передачи запросов замыкания первых тестовых контактов модулей для определения местоположения таким образом, что при обнаружении неисправности каната по сигналу от одного из аварийных контактов, блок безопасности выполняет итеративную последовательность путем передачи на модули для определения местоположения запросов временного замыкания первых тестовых контактов один за другим до тех пор, пока не будет определено местоположение неисправности каната между двумя последовательно расположенными модулями для определения местоположения.
[0013] Согласно еще одному признаку, блок безопасности содержит средства связи с модулями для определения местоположения с целью передачи запросов размыкания второго тестового контакта модулей для определения местоположения, так что при обнаружении неисправности в виде короткого замыкания, происходящего на линии безопасности, блок безопасности выполняет итеративную последовательность путем передачи на модули для определения местоположения запросов на временное размыкание их вторых тестовых контактов один за другим до тех пор, пока не будет определено местоположение неисправности в виде короткого замыкания между двумя последовательно расположенными модулями для определения местоположения.
[0014] Согласно еще одному признаку, каждый модуль для определения местоположения содержит средства обнаружения неисправности каната и неисправности в виде короткого замыкания на линии безопасности. При обнаружении неисправности каната по сигналу от одного из предохранительных контактов для каната каждый модуль для определения местоположения замыкает свой первый тестовый контакт на заданное время, которое зависит от порядкового номера модуля для определения местоположения в транспортной установке. Аналогичным образом, при обнаружении неисправности в виде короткого замыкания на линии безопасности, каждый модуль для определения местоположения размыкает свой второй тестовый контакт на заданное время, которое зависит от порядкового номера модуля для определения местоположения в транспортной установке.
[0015] Настоящее изобретение также описывает способ определения местоположения неисправности в канатной транспортной установке с помощью указанной системы для определения местоположения. При обнаружении неисправности каната по сигналу от одного из предохранительных контактов для каната блок безопасности выполняет итеративную последовательность путем передачи на модули для определения местоположения запросов временного замыкания их первых тестовых контактов один за другим с одновременным анализом сигналов, проходящих по линии безопасности, до тех пор, пока не будет определено местоположение неисправности каната между двумя последовательно расположенными модулями для определения местоположения. При обнаружении неисправности в виде короткого замыкания, происходящего на линии безопасности, блок безопасности выполняет итеративную последовательность путем передачи на модули для определения местоположения запросов на временное размыкание их вторых тестовых контактов один за другим с одновременным анализом прохождения сигналов по линии безопасности до тех пор, пока не будет определено местоположение неисправности в виде короткого замыкания между двумя последовательно расположенными модулями для определения местоположения. Согласно одному признаку, указанная итеративная последовательность является инкрементной, декрементной или дихотомической.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0016] Другие признаки и преимущества настоящего изобретения станут понятны после прочтения нижеследующего описания, приведенного со ссылкой на сопроводительные чертежи, на которых:
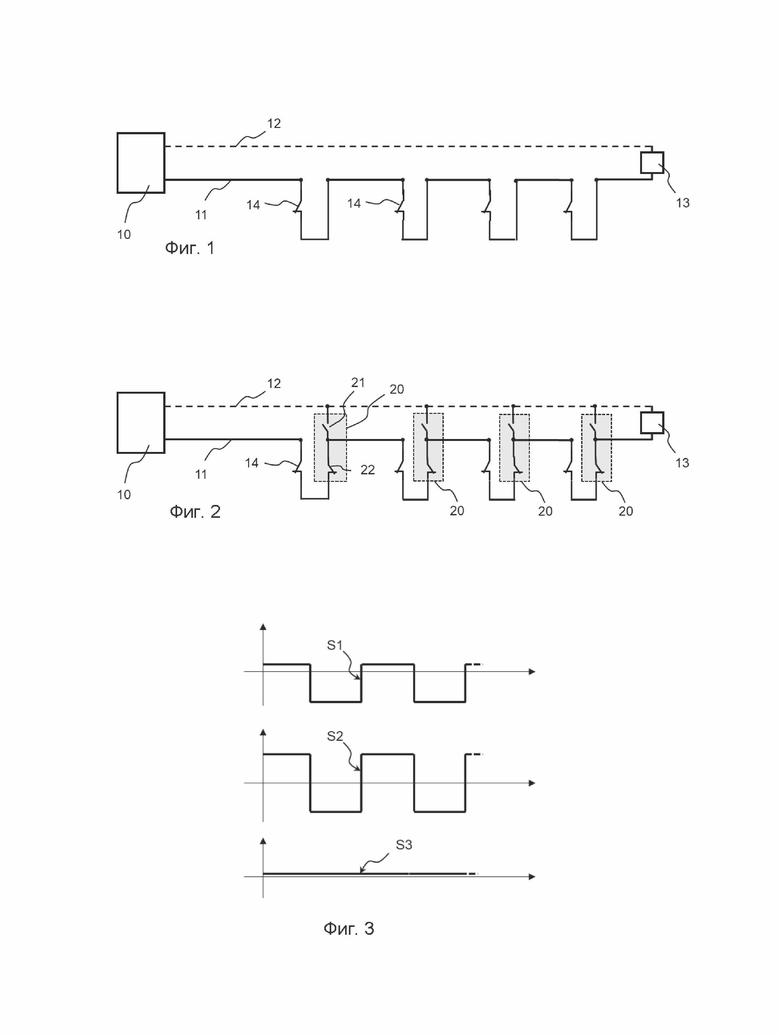
на Фиг. 1 показан упрощенный схематический вид одного варианта осуществления линии безопасности, известной из уровня техники, в транспортной установке;
на Фиг. 2 представлен упрощенный схематический вид линии безопасности согласно настоящему изобретению;
на Фиг. 3 показаны примеры диаграмм сигналов напряжения, проходящих по линии безопасности;
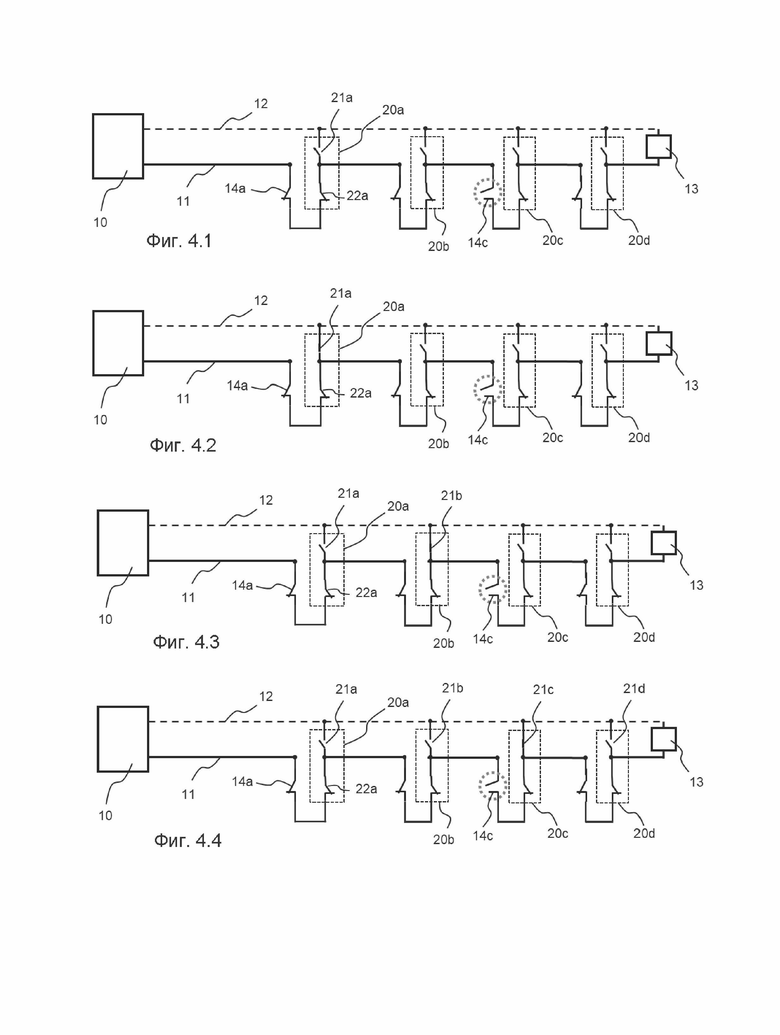
на Фиг. 4.1-4.4 представлен пример последовательности определения местоположения неисправности каната на линии безопасности; и
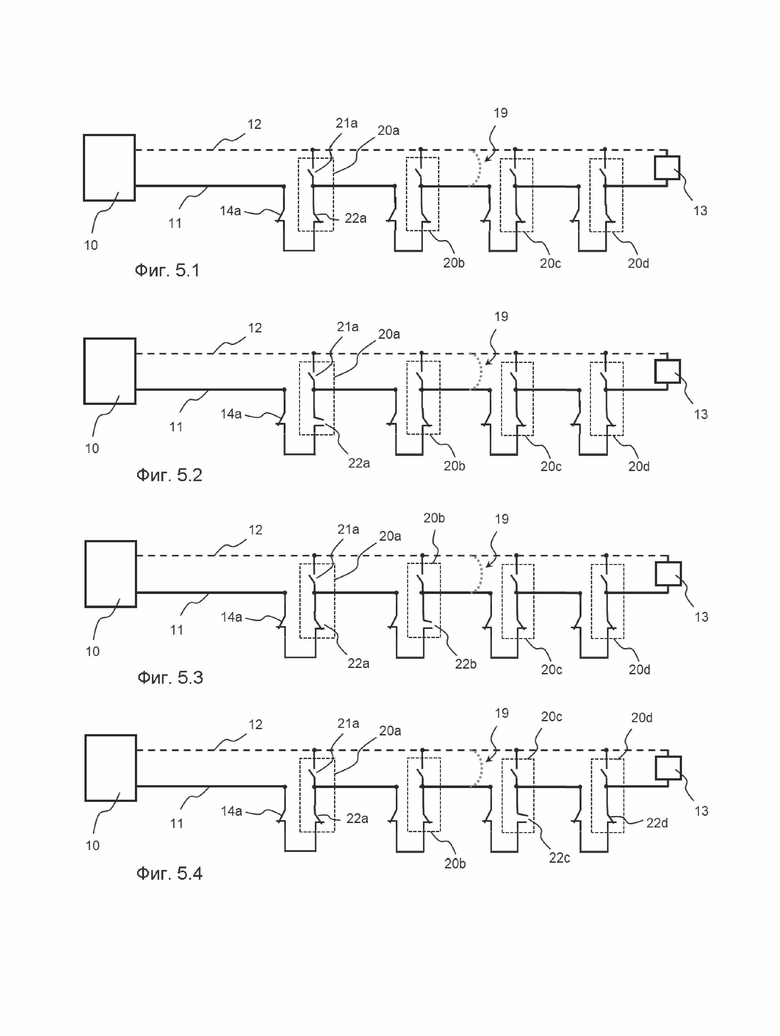
на Фиг. 5.1-5.4 представлен пример последовательности определения местоположения неисправности в виде короткого замыкания, происходящего на линии безопасности.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0017] Со ссылкой на Фиг. 1, система для определения местоположения неисправности каната в канатной транспортной установке содержит, в качестве известного средства, электрическую цепь безопасности, включенную между центральным блоком 10 безопасности на одном конце и оконечным модулем 13 на другом конце. Цепь безопасности состоит из основной линии 11 безопасности и обратной линии 12. Оконечный модуль 13 включает в себя, например, диод, катод которого соединен с землей, и блок 10 безопасности, также соединенный с землей, так что обратная линия 12 цепи безопасности фактически проходит через землю.
[0018] Блок 10 безопасности представляет собой модуль управления и мониторинга, который в целом расположен на приводной станции транспортной установки. Он включает в себя средства для передачи сигналов по линии 11 безопасности, а также средства для обнаружения размыкания линии 11 безопасности или короткого замыкания, происходящего на линии 11 безопасности, путем анализа сигналов, проходящих по линии 11 безопасности. Предпочтительно, он также включает в себя средства сигнализации и диалога между человеком и машиной, в частности для сигнализации о местоположении неисправности операторам транспортной установки.
[0019] Линия 11 безопасности включает в себя множество предохранительных контактов 14, которые отображают неисправность каната установки, такую как сход с направляющей. Они представляют собой контакты нормально замкнутого типа и соединены последовательно вдоль линии 11 безопасности. В настоящем документе контакт именуется контактом «нормально замкнутого» типа, если он находится в замкнутом положении по умолчанию в отсутствие каких-либо команд. И наоборот, контакт именуется контактом «нормально разомкнутого» типа, если он находится в разомкнутом (то есть в электрически непроводящем) положении по умолчанию в отсутствие каких-либо команд. Таким образом, во время нормальной работы, когда все предохранительные контакты 14 для каната находятся в замкнутом положении, цепь безопасности, образованная линией 11 безопасности и обратной линией 12, является проводящей. Однако, если положение одного из предохранительных контактов изменилось на разомкнутое, цепь 11 безопасности будет разорвана, что вызовет неисправность каната. В целях простоты чертежей, пример, показанный на чертежах, включает в себя лишь четыре предохранительных контакта 14, распределенных вдоль линии 11 безопасности.
[0020] Предохранительный контакт 14 непосредственно состоит, например, из разрушаемого проводящего стержня, который может быть размещен вблизи ролика на опоре, по которой проходит канат, и который при своем разрушении указывает на то, что канат покинул свое положение на ролике. Могут также использоваться механические разрушаемые стержни, которые при своем разрушении приводят в действие датчик местоположения, служащий в качестве предохранительного контакта 14. Предпочтительно, на каждой опоре установки имеется множество предохранительных контактов 14.
[0021] Со ссылкой на Фиг. 2, система для определения местоположения неисправности согласно настоящему изобретению включает в себя множество модулей 20 для определения местоположения, распределенных по транспортной установки. Каждый модуль 20 для определения местоположения включает в себя контакт 21 нормально разомкнутого типа, именуемый первым тестовым контактом, а также электронные средства управления для указанного контакта 21. Первый тестовый контакт 21 выполнен таким образом, что поступление на него запроса замыкания приводит к короткому замыканию линии 11 безопасности, например, вследствие ее соединения с землей.
[0022] Модули 20 для определения местоположения могут быть размещены, например, на каждой опоре, однако, в зависимости от географической конфигурации транспортной установки и требуемой точности определения местоположения неисправностей, может быть принято решение о том, чтобы иметь множество модулей 20 для определения местоположения в расчете на одну опору или один модуль 20 для определения местоположения в расчете на несколько опор. Тем не менее, очевидно, что чем больше модулей 20 для определения местоположения, тем выше точность определения местоположения неисправности каната или неисправности в виде короткого замыкания.
[0023] В целях упрощения чертежей, пример, показанный на различных чертежах, включает в себя четыре модуля 20 для определения местоположения, соединенных вдоль линии 11 безопасности со стороны нагрузки относительно каждого предохранительного контакта 14. В данном документе точка А будет условно именоваться расположенной со стороны нагрузки относительно точки В на линии 11 безопасности, если точка А физически расположена между блоком 10 безопасности и точкой А. Аналогичным образом, точка А будет именоваться расположенной со стороны питания относительно точки В на линии 11 безопасности, если точка А физически расположена между блоком 10 безопасности и точкой В.
[0024] Согласно настоящему изобретению, первые тестовые контакты 21 используются для определения местоположения неполадок, обнаруживаемых по сигналу от одного из предохранительных контактов 14 для каната. С этой целью, при обнаружении неисправности каната, то есть при размыкании одного из предохранительных контактов 14 для каната каждый модуль 20 для определения местоположения способен временно и выборочно замыкать свой первый тестовый контакт 21 таким образом, чтобы обеспечить возможность определения местоположения предохранительного контакта 14, соответствующего неисправности, согласно операции, которая будет подробно описана ниже.
[0025] В дополнение, для операторов транспортной установки важно также иметь возможность определения местоположения любых неисправностей в виде короткого замыкания, которые могут неожиданно возникать вдоль линии 11 безопасности. При возникновении неисправности в виде короткого замыкания, такой как самопроизвольное заземление из-за плохого электрического соединения на одной из опор, линия 11 безопасности больше не будет функционировать и, следовательно, предпочтительным является быстрое определение местоположения данной неисправности во избежание продолжительного отключения транспортной установки.
[0026] По этой причине каждый модуль 20 для определения местоположения может также предпочтительно включать в себя дополнительный контакт, именуемый вторым тестовым контактом 22, а также электронные средства управления для указанного второго тестового контакта 22. Второй тестовый контакт 22 представляет собой нормально замкнутый контакт, выполненный таким образом, что при поступлении на него запроса размыкания он создает разрыв в линии 11 безопасности.
[0027] Вторые тестовые контакты 22 используются для определения местоположений неисправностей в виде короткого замыкания на линии 11 безопасности согласно настоящему изобретению, при обнаружении короткого замыкания, причем каждый модуль 20 для определения местоположения способен временно и выборочно размыкать свой второй тестовый контакт 22 таким образом, чтобы обеспечить возможность определения местоположения указанной неисправности в виде короткого замыкания на линии 11 безопасности согласно настоящему изобретению, как будет подробно описано ниже.
[0028] На Фиг. 4.1-4.4 подробно показан вариант осуществления последовательности операций, выполняемых для определения местоположения неисправности каната. На этих фигурах можно видеть четыре модуля 20 для определения местоположения, а именно 20а, 20b, 20c и 20d соответственно, каждый из которых включает в себя первый тестовый контакт 21, а именно 21a, 21b, 21c и 21d соответственно.
[0029] На Фиг. 4.1 показано возникновение неисправности каната, представленной в виде размыкания предохранительного контакта 14с для каната, что приводит к размыканию линии 11 безопасности. После того, как указанное размыкание линии 11 безопасности обнаружено блоком 10 безопасности, запускается итеративная последовательность для определения местоположения неисправности каната. При этом блок 10 безопасности передает, на модули 20 для определения местоположения, запросы временного замыкания их первого тестового контакта 21 друг за другом (то есть отдельно друг от друга) и анализирует сигналы, проходящие по линии 11 безопасности после каждого замыкания до тех пор, пока не будет определено местоположение неисправности каната между двумя последовательно расположенными модулями 20 для определения местоположения.
[0030] Таким образом, блок 10 безопасности выбирает первый модуль 20а для определения местоположения (например, модуль, ближайший к блоку 10 безопасности) и передает на него запрос временного короткого замыкания (например, на 1 секунду) путем замыкания его первого тестового контакта 21а, как показано на Фиг. 4.2. В этот момент, если блоком 10 безопасности обнаружено, что линия 11 безопасности больше не разомкнута и является проводящей вследствие короткого замыкания, то это означает, что предохранительный контакт 14с для каната, который разомкнут, находится со стороны нагрузки относительно первого тестового контакта 21а (что показано на Фиг. 4.2), то есть что указанный первый модуль 20 для определения местоположения расположен между блоком 10 безопасности и предохранительным контактом 14с для каната, соответствующим неполадке.
[0031] Далее, после ожидания повторного размыкания первого тестового контакта 21а, блок 10 безопасности выбирает второй модуль 20b для определения местоположения для того, чтобы он, в свою очередь, осуществил короткое замыкание, и передает на него запрос замыкания его первого тестового контакта 21b, как показано на Фиг. 4.3. В этот момент, если блоком 10 безопасности снова обнаружено, что линия 11 безопасности больше не разомкнута и что она является проводящей вследствие короткого замыкания, то это означает, что предохранительный контакт 14с для каната все еще находится со стороны нагрузки относительно первого тестового контакта 21b (что показано на Фиг. 4.3), то есть что второй модуль 20b для определения местоположения расположен между блоком 10 безопасности и предохранительным контактом 14с для каната, соответствующим неполадке.
[0032] Далее, после ожидания повторного размыкания первого тестового контакта 21b, блок 10 безопасности выбирает третий модуль 20с для определения местоположения, чтобы он, в свою очередь, осуществил временное короткое замыкание путем замыкания своего первого тестового контакта 21b, как показано на Фиг. 4.4. В отличие от двух предыдущих случаев, блок 10 безопасности не будет обнаруживать короткое замыкание и будет продолжать рассматривать линию 11 безопасности как разомкнутую. Это означает, что предохранительный контакт 14с для каната теперь расположен со стороны питания относительно первого тестового контакта 21с, то есть предохранительный контакт 14с для каната, соответствующий неполадке, расположен между блоком 14с безопасности и третьим модулем 20с для определения местоположения. Таким образом, легко сделать вывод, что местоположение неисправности каната находится между последовательно расположенными модулями 20b и 20с для определения местоположения, что завершает последовательность определения местоположения неисправности каната.
[0033] В системе для определения местоположения, включающей в себя N модулей 20 для определения местоположения, возможны итеративные последовательности нескольких типов. В примере по Фиг. 4.1-4.4 указанная последовательность именуется инкрементной, поскольку она начинается с модуля 20а для определения местоположения с порядковым номером 1 (ближайшего к блоку 10 безопасности), и порядковый номер модуля для определения местоположения, подлежащего короткому замыканию, в этом случае итеративно возрастет до тех пор, пока не будет найдет порядковый номер i, при котором блок 10 безопасности больше не обнаруживает короткое замыкание в линии 11 безопасности, так что делается вывод о том, что местоположение неисправности находится между модулями 20 для определения местоположения с порядковыми номерами i и i-1.
[0034] В эквивалентном варианте указанная последовательность может быть декрементной, то есть начинаться с последнего модуля для определения местоположения с порядковым номером N (ближайшего к оконечному модулю 13), и порядковый номер модуля для определения местоположения, подлежащего короткому замыканию, в этом случае итеративно убывает до тех пор, пока не будет найдет порядковый номер i, при котором блок 10 безопасности обнаруживает короткое замыкание в линии 11 безопасности, так что делается вывод о том, что местоположение неисправности находится между модулями для определения местоположения с порядковыми номерами i и i+1.
[0035] Аналогичным образом, указанная последовательность может быть дихотомической, то есть начинаться с временного короткого замыкания модуля для определения местоположения с порядковым номером N/2 (или близким к N/2) для разделения линии 11 безопасности на две зоны, затем, в зависимости от результата, продолжаться модулем 20 для определения местоположения с порядковым номером либо 3N/4, либо порядковым номером N/4, и далее продолжаться аналогичным образом путем разделения на две зоны при каждой итерации до тех пор, пока не будут достигнуты два следующих подряд порядковых номера. Дихотомическая последовательность может иметь преимущество, состоящее в том, что она является более быстрой в случае большого количества N модулей для определения местоположения.
[0036] На Фиг. 5.1-5.4 показан подробно вариант осуществления операций указанной последовательности, выполняемых с целью определения местоположения неисправности в виде короткого замыкания. На этих фигурах можно видеть четыре модуля 20 для определения местоположения, обозначенных номерами 20a, 20b, 20c и 20d соответственно, каждый из которых включает в себя второй тестовый контакт 22, обозначенный номером 22a, 22b, 22c и 22d соответственно.
[0037] На Фиг. 5.1 показано возникновение неисправности в виде короткого замыкания между линией 11 безопасности и землей в месте, обозначенном номером 19. После того, как блоком 10 безопасности обнаружено короткое замыкание на линии 11 безопасности, запускается итеративная последовательность для определения местоположения неисправности в виде короткого замыкания. При этом блок 10 безопасности будет передавать, на модули 20 для определения местоположения, запросы размыкания по одному (то есть раздельно один за другим) их вторых тестовых контактов 22 и анализировать сигналы, проходящие по линии 11 безопасности после каждого размыкания, до тех пор, прока не будет определено местоположение 19 неисправности в виде короткого замыкания между двумя последовательно расположенными модулями 20 для определения местоположения.
[0038] Таким образом, блок 10 безопасности выбирает первый модуль 20а для определения местоположения (например, расположенный ближе всего к блоку 10 безопасности) и передает на него запрос на временное размыкание линии 11 безопасности (например, на 1 секунду) путем размыкания второго тестового контакта 22а, как показано на Фиг. 5.2. В этот момент, если блоком 10 безопасности обнаружено, что линия 11 безопасности больше не является короткозамкнутой и является разомкнутой, то это означает, что местоположение короткого замыкания 19 находится со стороны нагрузки относительно второго тестового контакта 22а (как показано на Фиг. 5.2), то есть что первый модуль 20а для определения местоположения расположен между блоком 10 безопасности и местоположением короткого замыкания 19.
[0039] Далее, после ожидания повторного замыкания второго тестового контакта 22а, блок 10 безопасности выбирает второй модуль 20b для определения местоположения и, в свою очередь, передает на него запрос на временное размыкание линии 11 безопасности путем размыкания его второго тестового контакта 22b, как показано на Фиг. 5.3. В этот момент, если блоком 10 безопасности снова обнаружено, что линия 11 безопасности больше не является короткозамкнутой и является разомкнутой, то это означает, что местоположение короткого замыкания 19 все еще расположено со стороны нагрузки относительно второго тестового контакта 22b (как показано на Фиг. 5.3), то есть что первый модуль 20b для определения местоположения расположен между блоком 10 безопасности и местоположением короткого замыкания 19.
[0040] Далее, после ожидания повторного размыкания второго тестового контакта 22b, блок 10 безопасности выбирает третий модуль 20с для определения местоположения, чтобы, в свою очередь, временно разомкнуть линию 11 безопасности, и передает на него запрос размыкания его второго тестового контакта 22с, как показано на Фиг. 5.4. В отличие от двух предыдущих случаев, блок 10 безопасности не будет обнаруживать размыкание линии 11 безопасности, и он будет продолжать рассматривать ее как короткозамкнутую. Это означает, что местоположение короткого замыкания 19 теперь расположено со стороны питания относительно второго тестового контакта 22с, то есть что местоположение короткого замыкания 19 расположено между блоком 10 безопасности и третьим модулем 20с для определения местоположения. Таким образом, легко сделать вывод о том, что местоположение короткого замыкания находится между последовательно расположенными модулями 20b и 20с для определения местоположения, что завершает последовательность определения местоположения неисправности в виде короткого замыкания.
[0041] Так же, как и в случае последовательностей определения местоположения неисправности каната, возможно использование последовательностей нескольких типов для определения местоположения короткого замыкания, в качестве части настоящего изобретения.
[0042] С целью повышения надежности системы, блок 10 безопасности не передает постоянный сигнал по линии 11 безопасности, и вместо этого он передает переменный сигнал, такой как периодический прямоугольный сигнал напряжения с амплитудой порядка ± 12 В и периодом порядка нескольких десятков миллисекунд (например, 55 миллисекунд, что соответствует приблизительно 18 Гц). Графики напряжения в зависимости от времени по данному варианту осуществления показаны на Фиг. 3. На данной фигуре показаны три графика S1, S2 и S3 напряжения на линии 11 безопасности, в зависимости от различных ситуаций. Первый график S1 показывает сигнал, измеренный с помощью блока 10 безопасности или с помощью модулей 20 для определения местоположения при нормальной работе во время передачи прямоугольного сигнала. На данном графике S1 положительный полупериод измеренного сигнала значительно ослаблен с помощью диода оконечного модуля 12, который проводит на землю в данном полупериоде.
[0043] Если неисправность каната привела к размыканию линии 11 безопасности, то второй график S2 по Фиг. 3 представляет сигнал, измеренный с помощью блока 10 безопасности или с помощью модуля 20 для определения местоположения, расположенного со стороны питания относительно разомкнутого предохранительного контакта 14 для каната. Даже если ток больше не протекает по линии 11 безопасности, график S2 соответствует непосредственно сигналу напряжения, передаваемому с помощью блока 10 безопасности без ослабления, при условии, что диод оконечного модуля больше не подключен.
[0044] Третий график S3 соответствует нулевому сигналу, измеренному в случае короткого замыкания на линии 11 безопасности. Третий график S3 также соответствует сигналу, который может быть измерен с помощью модуля 20 для определения местоположения, расположенного со стороны нагрузки относительно местоположения неисправности каната (то есть между разомкнутым предохранительным контактом 14 и оконечным модулем 13), поскольку данный модуль для определения местоположения фактически больше ничего не обнаруживает после того, как линия 11 безопасности разомкнута со стороны питания относительно него.
[0045] Блок 10 безопасности может осуществлять связь с модулями 20 для определения местоположения в системе для определения местоположения согласно стандартизованному или нестандартизованному протоколу. Физической средой для данной связи является либо проводная, либо беспроводная среда, реализуемая с помощью, например, сети WiFi или LPWAN (Low Power Wide Area Network, глобальной сети низкой мощности), или с помощью других средств. Если связь является проводной, то она осуществляется либо непосредственно с помощью проводов линии 11 безопасности путем наложения передаваемых сигналов на периодический прямоугольный сигнал, либо, предпочтительно, с использованием других проводов, потенциально доступных в многожильном электрическом кабеле, используемом для линии 11 безопасности. В новой установке предпочтительно используется проводная связь со специализированными проводами. Однако в случае обновления существующей установки и при отсутствии других доступных проводов, реализуют связь с наложением на провода линии 11 безопасности.
[0046] Данная связь обеспечивает возможность управления, с помощью блока 10 безопасности, итеративными последовательностями определения местоположения путем передачи на модули 20 для определения местоположения запросов размыкания и замыкания их тестовых контактов 21, 22. В дополнение, с целью повышения надежности данной связи, во время итеративных последовательностей, при передаче блоком 10 безопасности, на модуль 20 для определения местоположения, запроса замыкания его первого тестового контакта 21 или размывания его второго тестового контакта 22, протокол связи может включать передачу, с помощью этого модуля 20 для определения местоположения, подтверждения обратно на блок 10 безопасности посредством обратной связи для отображения того факта, что данный запрос исполнен.
[0047] Однако, если для связи непосредственно используется провод линии 11 безопасности, то очевидно, что размыкание или короткое замыкание данной линии 11 безопасности делает невозможной связь между блоком 10 безопасности и некоторыми из модулей 20 для определения местоположения. По этой причине, в данном случае предложен еще один вариант осуществления, который не зависит от данной связи.
[0048] В данном варианте осуществления различные модули 20 для определения местоположения могут сами анализировать сигналы, проходящие по линии 11 безопасности. Следовательно, они имеют средства для обнаружения неисправности каната и неисправности в виде короткого замыкания, происходящей на линии 11 безопасности, и они способны выборочно замыкать свои первые тестовые контакты 21 или размыкать свои вторые тестовые контакты 22.
[0049] Таким образом, если модулями 20 для определения местоположения обнаружено размыкание линии 11 безопасности, то указанная последовательность является следующей. Первый модуль 20 для определения местоположения, то есть модуль с порядковым номером 1, создает короткое замыкание путем замыкания своего первого тестового контакта 21 на 1 секунду и затем снова размыкает его на 1 секунду. Следовательно, модуль 20 для определения местоположения с порядковым номером 2, в свою очередь, ожидает 2 секунды, прежде чем замкнуть свой первый тестовый контакт 21 на 2 секунды, и затем снова замыкает его на 1 секунду. Следовательно, аналогичным образом, модуль 20 для определения местоположения с порядковым номером 3 ожидает 5 секунд, прежде чем замкнуть свой первый тестовый контакт 21 на 3 секунды, и затем снова размыкает его на 1 секунду. Это продолжается аналогичным образом, и каждый модуль 20 для определения местоположения с порядковым номером i ожидает в течение времени, равного ((i-1)*(i/2+1)) секундам, прежде чем замкнуть свой первый тестовый контакт 21 на период времени, равный i секундам, и затем повторно размыкает его на 1 секунду. Таким образом, путем измерения количества i секунд, в течение которого создано временное короткое замыкание, обеспечивается возможность определения того, что указанное короткое замыкание было создано модулем 20 для определения местоположения с порядковым номером i, без необходимости в связи между модулями 20 для определения местоположения и блоком 10 безопасности.
[0050] Аналогичным образом, если модулями 20 для определения местоположения обнаружена неисправность в виде короткого замыкания, то выполняется следующая последовательность. Первый модуль 20 определения местоположения с порядковым номером 1 осуществляет временное размыкание линии 11 безопасности путем размыкания своего второго испытательного контакта 22 на 1 секунду и затем его замыкания на 1 секунду. Следовательно, модуль 20 для определения местоположения с порядковым номером 2 ожидает 2 секунды, прежде чем разомкнуть свой второй тестовый контакт 22 на 2 секунды и затем замыкает его на 1 секунду. Это продолжается аналогичным образом, и каждый модуль 20 для определения местоположения с порядковым номером i ожидает в течение времени, равного ((i-1)*(i/2+1)) секундам, прежде чем разомкнуть свой второй тестовый контакт 22 на период времени, равный i секундам, и затем замыкает его на 1 секунду. Таким образом, путем измерения количества i секунд, в течение которых линия 11 безопасности временно разомкнута, обеспечивается возможность определения того, что временное размыкание было осуществлено модулем 20 для определения местоположения с порядковым номером i, без необходимости связи между указанными модулями и блоком безопасности.
[0051] Электропитание модулей 20 для определения местоположения может быть обеспечено несколькими способами: модули могут быть автономными, если они имеют внутреннюю батарею или если они получают питание, например, от солнечной панели опоры. Однако, во избежание установки локального источника питания, они также могут получать питание через доступный провод в многожильном электрическом кабеле, используемом для линии безопасности. И наконец, электропитание может поступать непосредственно от линии 11 безопасности в виде прямоугольного сигнала, который достаточен для зарядки батареи или конденсатора, но затем он может быть подвергнут прерываниям в линии 11 безопасности.
[0052] В настоящем изобретении также предложено решение для лучшего понимания проблемы самопроизвольных или неустойчивых неисправностей, которые могут возникать в канатной транспортной установке, в частности, вследствие вибрации роликов опоры или сложных погодных условий (обледенение, дождь, ветер и т.д.). Эти самопроизвольные неисправности могут также представлять собой неустойчивые размыкания линии 11 безопасности и неустойчивые короткие замыкания. Оказывается, что если имеет место лишь неустойчивая и нечеткая неисправность, то поиск истинной причины является очень долгим и утомительным.
[0053] Уже известно, что с этой целью может быть обеспечено резервирование путем установки двух параллельных линий безопасности вдоль транспортной установки, с помощью, например, набора пар стержней, которые соединены попарно, причем каждый стержень соединен с одной из указанных линий безопасности. Функционирование первого типа представляет собой работу в так называемом нормальном режиме резервирования, когда в каждый момент времени активна лишь одна из двух линий безопасности, и, если на активной линии обнаружена авария, то обеспечивается возможность легкого выполнения переключения на другую линию безопасности. Возможно также функционирование второго типа, когда две линии активны во время работы транспортной установки. В случае аварии на одной из двух линий, оператор после выполнения определенных проверок безопасности выбирает линию, остающуюся в рабочем состоянии, и перезапускает установку.
[0054] Благодаря указанному резервированию и системе определения местоположения по настоящему изобретению, облегчается определение местоположения неисправности на линии безопасности, страдающей от неустойчивых неисправностей, когда она неактивна. Чтобы лучше изолировать неисправность, делается попытка сократить указанную линию путем ее сегментирования с разделением на два участка, и проводится мониторинг оставшегося участка в течение достаточно длительного периода времени для определения того, продолжает ли возникать неустойчивая неисправность при тех же условиях.
[0055] С целью сегментирования линии блок 10 безопасности передает на модуль 20 для определения местоположения, расположенный приблизительно посередине линии безопасности, запрос выполнения действия, обратного обнаруженной неполадке, иначе говоря, либо размыкания его второго тестового контакта 22, если неустойчивая неполадка представляет собой короткое замыкание, либо замыкания его первого тестового контакта 21, если неустойчивая неисправность представляет собой неисправность каната. Если неустойчивая неполадка продолжает возникать при тех же условиях, то это означает, что место неисправности расположено на находящемся со стороны питания участке линии между блоком 10 безопасности и модулем 20 для определения местоположения. Если неустойчивая неисправность больше не возникает при тех же условиях, то это означает, что место неисправности расположено на участке линии, находящемся со стороны нагрузки, между модулем 20 для определения местоположения и оконечным модулем 13. Затем повторяют дихотомическую последовательность путем повторного сегментирования идентифицированного участка линии безопасности с его разделением на два участка до тех пор, пока не будет обнаружена самопроизвольная неисправность между двумя последовательно расположенными модулями для определения местоположения.
[0056] В дополнение, на системе для определения местоположения могут быть проведены самопроверки для обеспечения ее нормального функционирования. Предпочтительно, эти самопроверки проводятся в то время, когда транспортная установка не работает, чтобы не ставить под угрозу эксплуатационную безопасность, например один раз в день перед запуском установки. Блок безопасности передает на каждый из модулей для определения местоположения запросы последовательного выполнения замыкания, с помощью микропереключателя, их первого тестового контакта 21 и затем размыкания, с помощью микропереключателя, их второго тестового контакта 22, и анализа влияния на сигналы, проходящие по линии 11 безопасности.
[0057] С целью установки и сохранения порядкового номера i в каждом модуле 20 для определения местоположения, он может, например, предварительно задаваться посредством серийного номера или микропереключателей в модуле 20 для определения местоположения. Однако предпочтительно иметь возможность установки порядкового номера i с помощью программного обеспечения во время этапа конфигурирования при подключении к компьютеру, например перед установкой на месте модуля 20 для определения местоположения.
[0058] Разумеется, настоящее изобретение описано выше в качестве примера. Понятно, что специалисты в данной области техники способны создавать различные варианты осуществления настоящего изобретения без выхода за рамки объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛЕННАЯ СИСТЕМА МОНИТОРИНГА БЕЗОПАСНОСТИ С КОНТУРОМ БЕЗОПАСНОСТИ И СПОСОБ ТЕСТИРОВАНИЯ ТАКОЙ СИСТЕМЫ | 2009 |
|
RU2503966C2 |
| ПРЕДОХРАНИТЕЛЬНАЯ ЦЕПЬ В ЛИФТОВОЙ УСТАНОВКЕ | 2010 |
|
RU2543476C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИНИЦИИРОВАНИЯ АВАРИЙНОГО ВЫЗОВА В ТРАНСПОРТНОМ СРЕДСТВЕ | 2013 |
|
RU2600415C2 |
| ЭЛЕКТРОННАЯ ПРЕДОХРАНИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЭЛЕКТРИЧЕСКОГО БЫТОВОГО ПРИБОРА С ДВЕРЦЕЙ | 2009 |
|
RU2497989C2 |
| СИСТЕМА ПРИЕМО-ПЕРЕДАЧИ, КОНТРОЛЯ И ОБРАБОТКИ ДАННЫХ | 2012 |
|
RU2473973C1 |
| СИСТЕМА АККУМУЛИРОВАНИЯ ЭНЕРГИИ+ | 2011 |
|
RU2575862C2 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ С УЛУЧШЕННОЙ ФУНКЦИЕЙ ПОВТОРНОГО ЗАМЫКАНИЯ | 2009 |
|
RU2491690C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ В РЕАЛЬНОМ ВРЕМЕНИ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ СРЕДНЕГО И ВЫСОКОГО НАПРЯЖЕНИЯ | 2014 |
|
RU2665819C2 |
| СИСТЕМА ПОЖАРНОЙ СИГНАЛИЗАЦИИ И АВТОМАТИЧЕСКОГО ПОЖАРОТУШЕНИЯ ДЛЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2584852C9 |
| СИСТЕМА И СПОСОБ УСТРАНЕНИЯ РЕЖИМА КОРОТКОГО ЗАМЫКАНИЯ НА ЗЕМЛЮ, КОТОРЫЙ МОЖЕТ ВОЗНИКНУТЬ В СИСТЕМЕ ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2395146C2 |
Система для определения местоположения неисправности в канатной транспортной установке содержит блок (10) безопасности и оконечный модуль (13), соединенные с помощью электрической линии (11) безопасности. Линия (11) безопасности содержит множество предохранительных контактов (14) для каната, представляющих собой контакты нормально замкнутого типа, соединенные последовательно. Система для определения местоположения включает в себя множество модулей (20) для определения местоположения, которые распределены вдоль транспортной установки и каждый из которых содержит первый тестовый контакт (21) нормально разомкнутого типа для короткого замыкания линии (11) безопасности. После того, как по сигналу от одного из предохранительных контактов (14) для каната обнаружена неполадка, каждый модуль (20) для определения места способен выборочно замыкать свой первый тестовый контакт (21) таким образом, чтобы обеспечить возможность определения местоположения указанного предохранительного контакта (14) на линии безопасности. Обеспечивается простота и надежность для определения местоположения неисправности каната в транспортной установке. 3 н. и 10 з.п. ф-лы, 11 ил.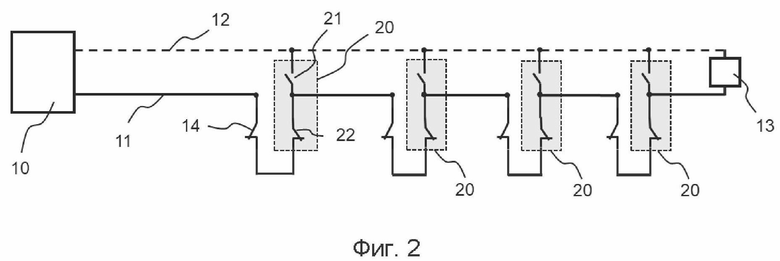
1. Система для определения местоположения неисправности в канатной транспортной установке, причем
- указанная система для определения местоположения неисправности содержит блок (10) безопасности, оконечный модуль (13) и электрическую линию (11) безопасности, соединяющую блок (10) безопасности с оконечным модулем (13),
- линия (11) безопасности содержит множество предохранительных контактов (14) для каната, которые представляют собой контакты нормально замкнутого типа, соединены последовательно вдоль линии (11) безопасности и при своем размыкании сигнализируют о неисправности каната в транспортной установке; отличающаяся тем, что:
- система для определения местоположения неисправности включает в себя множество модулей (20) для определения местоположения, которые распределены вдоль транспортной установки и каждый из которых содержит первый тестовый контакт (21) нормально разомкнутого типа для короткого замыкания линии (11) безопасности,
- после обнаружения неисправности по сигналу от одного из предохранительных контактов (14) для каната каждый модуль (20) для определения местоположения способен выборочно замыкать свой первый тестовый контакт (21) таким образом, чтобы обеспечить возможность определения местоположения указанного предохранительного контакта (14) на линии (11) безопасности.
2. Система для определения местоположения неисправности по п. 1, отличающаяся тем, что
- каждый модуль (20) для определения местоположения также содержит второй тестовый контакт (22) нормально замкнутого типа, присоединенный последовательно вдоль линии (11) безопасности;
- после того, как обнаружена неполадка в виде короткого замыкания на линии (11) безопасности, каждый модуль (20) для определения местоположения способен выборочно размыкать свой второй тестовый контакт (22) таким образом, чтобы обеспечить возможность определения местоположения указанной неисправности в виде короткого замыкания на линии (11) безопасности.
3. Система для определения местоположения неисправности по п. 1 или 2, отличающаяся тем, что блок (10) безопасности содержит средства обнаружения неисправности каната и неисправности в виде короткого замыкания, происходящего на линии (11) безопасности.
4. Система для определения местоположения неисправности по п. 1, отличающаяся тем, что блок (10) безопасности содержит средства связи с модулями (20) для определения местоположения с целью передачи запросов замыкания первого тестового контакта (21) модулей (20) для определения местоположения.
5. Система для определения местоположения неисправности по п. 4, отличающаяся тем, что при обнаружении неисправности каната по сигналу от одного из предохранительных контактов (14) для каната блок (10) безопасности выполняет итеративную последовательность путем передачи на модули (20) для определения местоположения запросов временного замыкания первых тестовых контактов (21) один за другим до тех пор, пока не будет определено местоположение неисправности каната между двумя последовательно расположенными модулями (20) для определения местоположения.
6. Система для определения местоположения неисправности по п. 2, отличающаяся тем, что блок (10) безопасности содержит средства связи с модулями (20) для определения местоположения с целью передачи на них запросов размыкания вторых тестовых контактов (22) модулей (20) для определения местоположения.
7. Система для определения местоположения неисправности по п. 6, отличающаяся тем, что при обнаружении неисправности в виде короткого замыкания, происходящего на линии (11) безопасности, блок (10) безопасности выполняет итеративную последовательность путем передачи на модули (20) для определения местоположения запросов на временное размыкание их вторых тестовых контактов (22) один за другим до тех пор, пока не будет определено местоположение неисправности в виде короткого замыкания между двумя последовательно расположенными модулями (20) для определения местоположения.
8. Система для определения местоположения неисправности по п. 2, отличающаяся тем, что каждый модуль (20) для определения местоположения содержит средства обнаружения неисправности каната и неисправности в виде короткого замыкания, происходящего на линии (11) безопасности.
9. Система для определения местоположения неисправности по п. 8, отличающаяся тем, что при обнаружении неисправности каната по сигналу от одного из предохранительных контактов (14) для каната каждый модуль (20) для определения местоположения замыкает свой первый тестовый контакт (21) на заданное время, которое зависит от порядкового номера модуля (20) для определения местоположения в транспортной установке.
10. Система для определения местоположения неисправности по п. 8, отличающаяся тем, что при обнаружении неисправности в виде короткого замыкания на линии (11) безопасности каждый модуль (20) для определения местоположения размыкает свой второй тестовый контакт (22) на заданное время, которое зависит от порядкового номера модуля (20) для определения местоположения в транспортной установке.
11. Способ определения местоположения неисправности в канатной транспортной установке с использованием системы для определения местоположения по п. 1, отличающийся тем, что при обнаружении неисправности каната по сигналу от одного из предохранительных контактов (14) для каната блок (10) безопасности выполняет итеративную последовательность путем передачи на модули (20) для определения местоположения запросов на временное замыкание первых тестовых контактов (21) один за другим и путем анализа сигналов, проходящих по линии (11) безопасности, до тех пор, пока не будет определено местоположение неисправности каната между двумя последовательно расположенными модулями (20) для определения местоположения.
12. Способ определения местоположения неисправности в канатной транспортной установке с использованием системы для определения местоположения по п. 2, отличающийся тем, что при обнаружении неисправности в виде короткого замыкания, происходящего на линии (11) безопасности, блок (10) безопасности выполняет итеративную последовательность путем передачи на модули (20) для определения местоположения запросов на временное размыкание их вторых тестовых контактов (22) один за другим и путем анализа сигналов, проходящих по линии (11) безопасности, до тех пор, пока не будет определено местоположение неисправности в виде короткого замыкания между двумя последовательно расположенными модулями (20) для определения местоположения.
13. Способ определения местоположения неисправности по п. 10 или 11, отличающийся тем, что итеративная последовательность является инкрементной, декрементной или дихотомической.
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ШИРОКОВЕЩАТЕЛЬНЫХ СИГНАЛОВ, УСТРОЙСТВО ДЛЯ ПРИЕМА ШИРОКОВЕЩАТЕЛЬНЫХ СИГНАЛОВ, СПОСОБ ПЕРЕДАЧИ ШИРОКОВЕЩАТЕЛЬНЫХ СИГНАЛОВ И СПОСОБ ПРИЕМА ШИРОКОВЕЩАТЕЛЬНЫХ СИГНАЛОВ | 2014 |
|
RU2628013C2 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОЙ ОБРАБОТКИ ПЛОСКОПАРАЛЛЕЛЬНЫХ ДЕТАЛЕЙ | 1964 |
|
SU180501A1 |
| US 2014361785 A1, 11.12.2014 | |||
| УСТРОЙСТВО И СПОСОБ ИДЕНТИФИКАЦИИ НЕИСПРАВНОСТИ НА ЛИНИИ ПЕРЕДАЧИ НА ОСНОВЕ НАПРЯЖЕНИЯ | 2011 |
|
RU2546188C1 |

