Перекрестная ссылка на родственную заявку
[0001] По этой заявке испрашивается приоритет на основании предварительной заявки США № 63/069,522, зарегистрированной 24 августа 2020 года, которая включена в данный документ по ссылке в целях изобретения.
Область техники, к которой относится изобретение
[0002] Настоящее открытие относится, в целом, к снабжению энергией имплантируемого устройства с помощью ультразвуковых волн и, более конкретно, к отслеживанию имплантируемого устройства, использующего ультразвуковые волны для эффективной доставки мощности имплантируемому устройству.
Уровень техники изобретения
[0003] Были разработаны способы для лечения различных заболеваний пациента. Эти способы могут подразумевать введение имплантируемого медицинского устройства, такого как кардиотонический или нейронный биоимплант, в тело человека. Оперирование такими имплантируемыми устройствами беспроводным образом продолжает быть технической проблемой для многих биомедицинских прикладных задач. Т.е. частично, так как традиционный подход использования радиочастот (RF) для управления беспроводными устройствами имеет множество ограничений в биомедицинском контексте и может представлять собой опасность для здоровья пациента. Например, RF-антенна, необходимая для обработки RF, может иметь большой форм-фактор и сделает имплантируемое устройство, использующее RF-антенну, слишком большим для безопасного и комфортного размещения во множестве мест в теле. Биологическая ткань также имеет тенденцию легко поглощать энергию из RF-несущих частот, что может ограничивать глубину имплантации имплантируемого устройства. Кроме того, вследствие сильной степени поглощения RF-энергии, биологическая ткань может более вероятно перегреваться и представлять собой опасность для здоровья пациента.
[0004] Одной альтернативной использованию RF является использование внешних ультразвуковых опрашивающих устройств, которые излучают ультразвуковые волны, чтобы приводить в действие и питать энергией небольшие имплантируемые устройства в пациенте. Во время использования, однако, опрашивающее устройство и целевое имплантируемое устройство часто не совмещаются вследствие движения между опрашивающим устройством и имплантируемым устройством. Например, вследствие движения тела или дыхания пациента позиция имплантируемого устройства может сдвигаться. Аналогично, вследствие движения оператора опрашивающего устройства (например, трясущиеся руки или движение тела), позиция опрашивающего устройства может сдвигаться. В том или другом случае, опрашивающее устройство может не снабжать эффективно энергией имплантируемое устройство вследствие неточного совмещения. Хотя мощность, предоставляемая опрашивающим устройством, может быть повышена, чтобы компенсировать неточное совмещение, ультразвуковая мощность может быть повышена лишь настолько, чтобы оставаться в пределах нормативных рекомендаций и предотвращать нанесение вреда телу пациента. Если имплантируемое устройство не отслеживается эффективно, имплантируемое устройство может не снабжаться мощностью эффективно, и его операции могут быть ненадежными.
[0005] Раскрытия всех публикаций, патентов и патентных заявок, на которые делается ссылка в данном документе, каждое, таким образом, содержатся по ссылке в своей полноте. До такой степени, до которой какая-либо ссылка, включенная по ссылке, конфликтует с текущим открытием, текущее открытие должно иметь преимущественную силу.
Сущность изобретения
[0006] Использование ультразвуковых волн для приведения в действие и питания имплантируемого устройства может быть полезным по сравнению с другими подходами, так как биологические ткани имеют значительно более низкие степени поглощения ультразвуковых волн по сравнению с другими типами волн, такими как RF-волны. Это свойство ультразвуковых волн может предоставлять возможность устройству быть имплантируемым на более значительных глубинах в субъекте, также как уменьшать нагрев ткани вследствие энергии, поглощаемой тканью. Например, имплантируемое устройство может включать в себя ультразвуковой преобразователь, приспособленный для приема ультразвуковых волн, излучаемых опрашивающим устройством, и преобразования механической энергии принимаемых ультразвуковых волн в электрическую энергию для питания имплантируемого устройства. Остается потребность, однако, в предоставлении возможности опрашивающему устройству эффективно отслеживать имплантируемые устройства, питаемые энергией с помощью ультразвуковых волн.
[0007] В некоторых вариантах осуществления, способ для отслеживания имплантируемого устройства, питаемого с помощью ультразвуковых волн, чтобы поддерживать питание, подаваемое к имплантируемому устройству, содержит установку состояния синхронизации с имплантируемым устройством, содержащую: излучение ультразвукового луча в первую фокусную точку и прием первого ультразвукового обратно рассеянного излучения; и установку состояния синхронизации с имплантируемым устройством в ответ на определение того, что первая сила сигнала равна или выше предварительно определенного порогового значения; оценка местоположения имплантируемого устройства; излучение ультразвукового луча во вторую фокусную точку, более близкую к оцененному местоположению по сравнению с первой фокусной точкой, и прием второго ультразвукового обратно рассеянного излучения, соответствующего излучаемому ультразвуковому лучу; определение второй силы сигнала на основе второго ультразвукового обратно рассеянного излучения; и определение того, сохранять или регулировать место, куда излучаемый ультразвуковой луч фокусируется, на основе сравнения определенной второй силы сигнала с первой силой сигнала.
[0008] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства установка состояния синхронизации содержит управление ультразвуковым лучом, чтобы последовательно фокусироваться на множестве фокусных точек в области исследования, чтобы определять первую фокусную точку, в которой первая сила сигнала удовлетворяет предварительно определенному пороговому значению. В некоторых вариантах осуществления управление ультразвуковым лучом содержит направление ультразвукового луча в первом направлении, чтобы последовательно фокусироваться на множестве фокусных точек до тех пор, пока первая сила сигнала, определяемая из первого ультразвукового обратно рассеянного излучения, определяется выше предварительно определенного порогового значения.
[0009] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, способ содержит, в ответ на определение необходимости поддерживать определенную фокусную точку ультразвукового луча во второй фокусной точке, поддерживание ультразвукового луча сфокусированным на определенной второй фокусной точке и наблюдение за силой сигнала, определяемой из ультразвукового обратно рассеянного излучения, принимаемого, в то время как ультразвуковой луч фокусируется на определенной второй фокусной точке.
[0010] В некоторых вариантах осуществления наблюдаемая сила сигнала соответствует модулированному сигналу, сформированному имплантируемым устройством для кодирования информации в ультразвуковое обратное рассеянное излучение, принимаемое в опрашивающем устройстве. В некоторых вариантах осуществления, закодированная информация уникально идентифицирует имплантируемое устройство.
[0011] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, способ содержит, в ответ на определение необходимости регулировки второй фокусной точки ультразвукового луча, итеративную оценку местоположения имплантируемого устройства на основе принимаемого ультразвукового обратно рассеянного излучения и обновление фокусной точки ультразвукового луча в направлении оцененного местоположения до тех пор, пока сила сигнала, определяемая из ультразвукового обратно рассеянного излучения, принимаемого для обновленной фокусной точки, больше не будет увеличиваться.
[0012] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, определение первой силы сигнала на основе первого ультразвукового обратно рассеянного излучения содержит извлечение, из первого ультразвукового обратно рассеянного излучения, сигнала импланта, ассоциированного с имплантируемым устройством; и определение первой силы сигнала на основе извлеченного сигнала импланта. В некоторых вариантах осуществления, извлечение сигнала импланта содержит подавление помех сигнала от обратно рассеянных ультразвуковых волн, чтобы извлекать сигнал импланта. В некоторых вариантах осуществления, способ содержит идентификацию отслеживаемого имплантируемого устройства на основе извлеченного сигнала импланта.
[0013] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, первое ультразвуковое обратно рассеянное излучение содержит первый фрагмент, который включает в себя сигнал импланта, закодированный имплантируемым устройством в первое ультразвуковое обратно рассеянное излучение, и второй фрагмент, который не включает в себя сигнал импланта. В некоторых вариантах осуществления, способ содержит определение первой силы сигнала для сигнала импланта на основе сравнения первого фрагмента и второго фрагмента первого ультразвукового обратно рассеянного излучения.
[0014] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, местоположение имплантируемого устройства рассчитывается после установки состояния синхронизации.
[0015] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, местоположение имплантируемого устройства рассчитывается на основе формирования сигнала для приема.
[0016] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, способ содержит определение фокусной точки, ассоциированной с локальной максимальной силой сигнала, содержащее, итеративно: оценка местоположения имплантируемого устройства; направление ультразвукового луча из текущей фокусной точки в испытываемую фокусную точку на основе направления оцененного местоположения имплантируемого устройства относительно текущей фокусной точки, при этом текущая фокусная точка становится предыдущей фокусной точкой; определение силы сигнала на основе ультразвукового обратно рассеянного излучения, когда ультразвуковой луч излучается в испытываемую фокусную точку; и сравнение силы сигнала, когда ультразвуковой луч излучается в испытываемую фокусную точку, с силой сигнала, когда ультразвуковой луч излучается в предыдущую фокусную точку. В некоторых вариантах осуществления способ содержит, в ответ на определение фокусной точки, ассоциированной с локальным максимумом, установку устойчивого режима с имплантируемым устройством, при этом, если сила сигнала снижается ниже второго предварительно определенного порогового значения, фокусная точка, ассоциированная с локальным максимальным сигналом, повторно определяется.
[0017] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, определение того, поддерживать ли точку, где излучаемый ультразвуковой луч фокусируется, содержит наблюдение за перемещением опрашивающего устройства; и определение регулировки в фокусную точку ультразвукового луча на основе наблюдаемого перемещения.
[0018] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, способ выполняется в опрашивающем устройстве.
[0019] В некоторых вариантах осуществления системы для отслеживания имплантируемого устройства, питаемого энергией с помощью ультразвуковых волн, система содержит: массив измерительных преобразователей, содержащий множество измерительных преобразователей; и контроллер, сконфигурированный, чтобы: устанавливать состояние синхронизации с имплантируемым устройством, содержащее: управление массивом измерительных преобразователей, чтобы излучать ультразвуковой луч в первую фокусную точку и принимать первое ультразвуковое обратно рассеянное излучение, соответствующее излучаемому ультразвуковому лучу; определять первую силу сигнала на основе первого ультразвукового обратно рассеянного излучения; и устанавливать состояние синхронизации с имплантируемым устройством в ответ на определение того, что первая сила сигнала равна или выше предварительно определенного порогового значения; оценивать местоположение имплантируемого устройства; управлять массивом измерительных преобразователей, чтобы излучать ультразвуковой луч во вторую фокусную точку ближе к оцененному местоположению по сравнению с первой фокусной точкой, и принимать второе ультразвуковое обратно рассеянное излучение, соответствующее излучаемому ультразвуковому лучу; определять вторую силу сигнала на основе второго ультразвукового обратно рассеянного излучения; и определять, сохранять или регулировать место, куда излучаемый ультразвуковой луч фокусируется, на основе сравнения определенной второй силы сигнала с первой силой сигнала.
[0020] В некоторых вариантах осуществления способа для отслеживания имплантируемого устройства, питаемого энергией с помощью ультразвуковых волн, способ содержит: излучение ультразвукового луча, чтобы последовательно фокусироваться на множестве фокусных точек; в каждой фокусной точке из множества фокусных точек: удерживание сфокусированного ультразвукового луча в фокусной точке в течение интервала времени, который позволяет имплантируемому устройству, если располагается в фокусной точке, преобразовывать энергию из ультразвуковых волн ультразвукового луча в электрическую энергию, чтобы входить во включенное состояние из выключенного состояния, прием ультразвукового обратно рассеянного излучения, соответствующего ультразвуковому лучу, сфокусированному на фокусной точке, и сравнение принятого ультразвукового обратно рассеянного излучения с предварительно определенным шаблоном, ассоциированным с имплантируемым устройством, которое должно быть обнаружено, чтобы формировать оценку, указывающую, насколько вероятно ультразвуковое обратно рассеянное излучение содержит предварительно определенный шаблон; и определение местоположения имплантируемого устройства из множества фокусных точек на основе множества оценок, сформированных для каждой фокусной точки во множестве фокусных точек.
[0021] В некоторых реализациях способа для обнаружения имплантируемого устройства, способ содержит инструктирование имплантируемому устройству входить во включенное состояние.
[0022] В некоторых вариантах осуществления способа для обнаружения имплантируемого устройства, способ дополнительно содержит установку ультразвуковой линии связи с имплантируемым устройством с помощью ультразвуковых волн, излучаемых опрашивающим устройством, сфокусированным в фокусной точке, соответствующей определенному местоположению имплантируемого устройства.
[0023] В некоторых вариантах осуществления способа для обнаружения имплантируемого устройства, множество фокусных точек соответствует регулируемому диапазону ультразвукового луча.
[0024] В некоторых вариантах осуществления способа для обнаружения имплантируемого устройства, предварительно определенный шаблон содержит одну или более прямоугольных волн.
[0025] В некоторых реализациях способа для обнаружения имплантируемого устройства, предварительно определенный шаблон уникально идентифицирует имплантируемое устройство.
[0026] В некоторых вариантах осуществления способа для обнаружения имплантируемого устройства, предварительно определенный шаблон содержит информацию, закодированную имплантируемым устройством в ультразвуковое обратно рассеянное излучение. В некоторых вариантах осуществления, имплантируемое устройство принимает ультразвуковые волны из излучаемого ультразвукового луча и кодирует информацию в ультразвуковое обратно рассеянное излучение, модулируя электрический сигнал, сформированный на основе ультразвуковых волн, принимаемых в имплантируемом устройстве.
[0027] В некоторых вариантах осуществления способа для обнаружения имплантируемого устройства, определение местоположения имплантируемого устройства содержит выбор фокусной точки из подмножества фокусных точек во множестве фокусных точек, при этом оценка, соответствующая каждой фокусной точке в подмножестве фокусных точек, выше предварительно определенного порогового значения.
[0028] В некоторых вариантах осуществления способа для обнаружения имплантируемого устройства, определение местоположения имплантируемого устройства содержит выбор фокусной точки из множества фокусных точек как являющейся наиболее вероятно местоположением имплантируемого устройства на основе множества оценок.
[0029] В некоторых вариантах осуществления способа для обнаружения имплантируемого устройства, способ содержит подтверждение местоположения имплантируемого устройства, содержащее излучение ультразвукового луча для фокусировки на выбранной фокусной точке в течение предварительно определенного периода времени; и анализ ультразвукового обратно рассеянного излучения, принимаемого, в то время как ультразвуковой луч фокусируется на выбранной фокусной точке, чтобы подтверждать, что имплантируемое устройство находится в выбранной фокусной точке. В некоторых вариантах осуществления способ содержит, в ответ на подтверждение того, что имплантируемое устройство находится в выбранной фокусной точке, сохранение ультразвукового луча в выбранной фокусной точке.
[0030] В некоторых вариантах осуществления, способ для обнаружения имплантируемого устройства выполняется в опрашивающем устройстве. В некоторых вариантах осуществления, опрашивающее устройство содержит множество измерительных преобразователей в массиве измерительных преобразователей, и при этом излучение ультразвукового луча, чтобы последовательно фокусироваться на множестве фокусных точек, содержит управление множеством измерительных преобразователей, чтобы передавать ультразвуковые волны в ультразвуковом луче для последовательной фокусировки на множестве фокусных точек. В некоторых вариантах осуществления, излучение ультразвукового луча содержит последовательное направление сфокусированного ультразвукового луча в каждую фокусную точку из множества фокусных точек в регулируемом угловом диапазоне массива измерительных преобразователей. В некоторых вариантах осуществления, излучение ультразвукового луча содержит механическое перемещение массива измерительных преобразователей, чтобы последовательно направлять сфокусированный ультразвуковой луч на каждую фокусную точку из множества фокусных точек. В некоторых вариантах осуществления, излучение ультразвукового луча содержит управление тем, когда питание подается к каждому измерительному преобразователю в массиве измерительных преобразователей, чтобы последовательно направлять сфокусированный ультразвуковой луч в каждую фокусную точку из множества фокусных точек.
[0031] В некоторых вариантах осуществления способа для обнаружения имплантируемого устройства, имплантируемое устройство содержит один или более конденсаторов для сохранения электрической энергии, преобразованной из ультразвуковых волн ультразвукового луча, чтобы входить во включенное состояние из выключенного состояния.
[0032] В некоторых вариантах осуществления вышеописанных способов, ультразвуковой луч имеет размер пятна менее 10 мм.
[0033] В некоторых вариантах осуществления, опрашивающее устройство для обнаружения имплантируемого устройства, питаемого с помощью ультразвуковых волн, содержит: массив измерительных преобразователей, содержащий множество измерительных преобразователей; и контроллер, сконфигурированный, чтобы: управлять массивом измерительных преобразователей, чтобы излучать ультразвуковой луч, последовательно фокусируемый на множестве фокусных точек; в каждой фокусной точке из множества фокусных точек: удерживать сфокусированный ультразвуковой луч в фокусной точке в течение продолжительности, которая позволяет имплантируемому устройству, если располагается в фокусной точке, преобразовывать энергию из ультразвуковых волн ультразвукового луча в электрическую энергию и входить во включенное состояние из выключенного состояния, принимать ультразвуковое обратно рассеянное излучение, соответствующее излучаемому ультразвуковому лучу, и сравнивать принимаемое ультразвуковое обратно рассеянное излучение с предварительно определенным шаблоном, ассоциированным с имплантируемым устройством, которое должно быть обнаружено, чтобы формировать оценку, указывающую, насколько вероятно ультразвуковое обратно рассеянное излучение содержит предварительно определенный шаблон; и определять местоположение имплантируемого устройства из множества фокусных точек на основе множества оценок, сформированных для множества соответствующих фокусных точек.
[0034] Далее в данном документе описываются различные варианты осуществления системы для оперирования имплантируемым устройством с помощью ультразвуковых волн, согласно какому-либо из вышеупомянутых вариантов осуществления способа.
Краткое описание чертежей
[0035] Предшествующая сущность, также как последующее подробное описание вариантов осуществления является более понятным, когда читается вместе с прилагаемыми чертежами. В целях иллюстрации настоящего раскрытия, чертежи показывают примерные варианты осуществления открытия; раскрытие, однако, не ограничивается конкретными способами и раскрытыми техническими средствами. На чертежах:
[0036] Фиг. 1 иллюстрирует систему для питания энергией имплантируемого устройства с помощью ультразвуковых волн, излучаемых опрашивающим устройством, согласно некоторым вариантам осуществления;
[0037] Фиг. 2 иллюстрирует панели, показывающие фрагменты излучаемых ультразвуковых волн для питания энергией имплантируемого устройства, согласно некоторым вариантам осуществления;
[0038] Фиг. 3 иллюстрирует панели, показывающие, как опрашивающее устройство обрабатывает ультразвуковое обратно рассеянное излучение, принимаемое в опрашивающем устройстве, согласно некоторым вариантам осуществления;
[0039] Фиг. 4A иллюстрирует примерную схему, которая показывает, как опрашивающее устройство управляет местом, куда ультразвуковой (УЗ) луч фокусируется, чтобы обнаруживать и питать энергией имплантируемое устройство, согласно некоторым вариантам осуществления;
[0040] Фиг. 4B иллюстрирует примерную схему, которая показывает, как опрашивающее устройство управляет местом, куда ультразвуковой (УЗ) луч фокусируется, чтобы эффективно питать энергией имплантируемое устройство, согласно некоторым вариантам осуществления;
[0041] Фиг. 5 иллюстрирует опрашивающее устройство, сконфигурированное, чтобы питать одно или более имплантируемых устройств с помощью ультразвуковых волн, согласно некоторым вариантам осуществления;
[0042] Фиг. 6 иллюстрирует имплантируемое устройство, которое питается энергией и задействуется с помощью ультразвуковых волн, согласно некоторым вариантам осуществления;
[0043] Фиг. 7 иллюстрирует способ для обнаружения имплантируемого устройства с помощью ультразвуковых волн, согласно некоторым вариантам осуществления;
[0044] Фиг. 8 иллюстрирует схему, показывающую примерную операционную логику опрашивающего устройства, чтобы эффективно питать имплантируемое устройство с помощью ультразвуковых волн, согласно некоторым вариантам осуществления;
[0045] Фиг. 9 иллюстрирует способ для отслеживания имплантируемого устройства, питаемого с помощью ультразвуковых волн, согласно некоторым вариантам осуществления;
[0046] Фиг. 10 иллюстрирует способ для отслеживания имплантируемого устройства, питаемого с помощью ультразвуковых волн, чтобы эффективно поддерживать мощность, подаваемую к имплантируемому устройству, согласно некоторым вариантам осуществления;
[0047] Фиг. 11 иллюстрирует способ для отслеживания имплантируемого устройства, питаемого с помощью ультразвуковых волн, чтобы эффективно поддерживать мощность, подаваемую к имплантируемому устройству, согласно некоторым вариантам осуществления;
[0048] Фиг. 12 иллюстрирует примерную схему, показывающую шаблон, закодированный имплантируемым устройством в ультразвуковое обратно рассеянное излучение, принимаемое опрашивающим устройством, согласно некоторым вариантам осуществления;
[0049] Фиг. 13 иллюстрирует примерные диаграммы, которые показывают, насколько точно опрашивающее устройство оценивает местоположение имплантируемого устройства в режиме обнаружения, согласно некоторым вариантам осуществления; и
[0050] Фиг. 14 иллюстрирует схему имплантируемого устройства, сконфигурированного для взаимодействия с нервом субъекта, согласно некоторым вариантам осуществления.
Подробное описание изобретения
[0051] В данном документе описываются системы и способы для обнаружения и отслеживания устройства, имплантируемого в субъекте, с помощью ультразвуковых волн, излучаемых опрашивающим устройством. Имплантируемое устройство может включать в себя ультразвуковой преобразователь, сконфигурированный, чтобы принимать ультразвуковые волны, излучаемые опрашивающим устройством, и преобразовывать механическую энергию принимаемых ультразвуковых волн в электрическую энергию. Так как имплантируемое устройство принимает мощность, передаваемую посредством ультразвуковых волн, перенос мощности от опрашивающего устройства должен быть эффективным и надежным. В некоторых вариантах осуществления, чтобы обеспечивать эти функциональные возможности, опрашивающее устройство должно быть приспособлено для связи с имплантируемым устройством, чтобы оценивать то, эффективно ли мощность передается посредством излучаемых ультразвуковых волн имплантируемому устройству. В некоторых вариантах осуществления имплантируемое устройство может быть сконфигурировано, чтобы модулировать электрический сигнал в ультразвуковом преобразователе на имплантируемом устройстве, чтобы внедрять сигнал импланта в ультразвуковое обратно рассеянное излучение, соответствующее ультразвуковым волнам, излучаемым опрашивающим устройством. Например, внедренный сигнал может включать в себя информацию, сформированную посредством, или которая ассоциируется с имплантируемым устройством.
[0052] Посредством этого механизма опрашивающее устройство может быть сконфигурировано, чтобы получать силу сигнала для сигнала импланта, извлеченного из принятого ультразвукового обратно рассеянного излучения, и использовать полученную силу сигнала в качестве указания того, насколько эффективно ультразвуковая мощность передается имплантируемому устройству. Например, вследствие неточного совмещения между излучаемым ультразвуковым (УЗ) лучом опрашивающего устройства и имплантируемым устройством, которое может быть вызвано движением пациента или оператора опрашивающего устройства, полученная сила сигнала будет низкой или снижаться. Соответственно, опрашивающее устройство может быть сконфигурировано, чтобы управлять фокусом луча для УЗ-луча, чтобы увеличивать совмещение и, следовательно, максимизировать мощность, падающую на ультразвуковой преобразователь имплантируемого устройства. Кроме того, опрашивающее устройство может быть сконфигурировано, чтобы наблюдать за силой сигнала, определенной из ультразвукового обратно рассеянного излучения, чтобы отслеживать имплантируемое устройство, когда его позиция сдвигается, чтобы сохранять совмещение и эффективную доставку мощности имплантируемому устройству.
[0053] Фиг. 1 иллюстрирует систему 100 для питания энергией имплантируемого устройства 120 с помощью ультразвуковых волн, излучаемых опрашивающим устройством 106, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, имплантируемое устройство 120 может быть имплантировано в субъекте, такого как пациент, и опрашивающее устройство 106 может быть отдельным устройством, которое является внешним (т.е.не имплантированным) или полностью имплантированным в пациенте. Как показано в системе 100, имплантируемое устройство 120 может быть расположено в области 102 (например, области кожи субъекта) и имплантировано в субъекте.
[0054] В некоторых вариантах осуществления, опрашивающее устройство 106 может быть сконфигурировано, чтобы управлять множеством ультразвуковых преобразователей 108, чтобы излучать ультразвуковые волны, сужающиеся в ультразвуковой (УЗ) луч 110, чтобы питать имплантируемое устройство 120. Например, как будет дополнительно описано ниже относительно фиг. 5, ультразвуковые преобразователи 108 могут быть предоставлены как массив измерительных преобразователей, и опрашивающее устройство 106 может индивидуально управлять ультразвуковыми преобразователями 108, чтобы формировать УЗ-луч 110 способом, известным как формирование электронного луча. В результате этого способа, волновые фронты ультразвуковых волн, излучаемых множеством ультразвуковых преобразователей 108, будут пересекаться в фокусной точке 112, которая соответствует конкретному фрагменту УЗ-луча 110 с наивысшей интенсивностью луча. Фокусная точка 112 также соответствует наиболее узкой части диаметра луча для УЗ-луча 110. Следовательно, опрашивающее устройство 106 может передавать ультразвуковую мощность УЗ-луча 110 в ограниченную область, т.е. фокусную точку 112. Дополнительно, опрашивающее устройство 106 может быть сконфигурировано, чтобы индивидуально управлять ультразвуковыми преобразователями 108, чтобы изменять позицию фокусной точки 112. В некоторых вариантах осуществления, опрашивающее устройство 106 может формировать УЗ-луч 110, имеющий размер пятна около 1 мм или менее, около 2 мм или менее, около 3 мм или менее, около 5 мм или менее, около 7 мм или менее, или около 10 мм или менее. В некоторых вариантах осуществления, опрашивающее устройство 106 может формировать УЗ-луч 110, имеющий размер пятна, по меньшей мере, 0,5 мм, по меньшей мере, 1 мм, по меньшей мере, 2 мм, по меньшей мере, 3 мм, по меньшей мере, 5 мм или, по меньшей мере, 7 мм. В некоторых вариантах осуществления, размер пятна может быть между приблизительно 2-8 мм, 2-5 мм или 2-4 мм.
[0055] В некоторых вариантах осуществления, когда ультразвуковые преобразователи 108 являются элементами 2D-массива измерительных преобразователей, опрашивающее устройство 106 может изменять позицию фокусной точки 112 УЗ-луча 110 в плоскости, которая представлена перпендикулярными осями 114A и 114B. Другими словами, опрашивающее устройство 106 может направлять фокусную точку 112 на множество позиций в регулируемом диапазоне ультразвуковых преобразователей 108, которые могут охватывать, например, область 102. В некоторых вариантах осуществления, как будет дополнительно описано ниже, опрашивающее устройство 106 может управлять местом, куда УЗ-луч 110 фокусируется, чтобы увеличивать совмещение между УЗ-лучом 110 и имплантируемым устройством 120. Увеличенное совмещение не только предоставляет возможность более эффективной передачи ультразвуковой мощности имплантируемому устройству 120, но также увеличивает более высокую надежность устройства и безопасность, так как ультразвуковую мощность нет необходимости увеличивать сверх небезопасных уровней. Как показано, опрашивающее устройство 106 может передавать ультразвуковые волны, содержащие несущий сигнал, в форме УЗ-луча 110.
[0056] В некоторых вариантах осуществления, имплантируемое устройство 120 может беспроводным образом снабжаться питанием и задействоваться посредством ультразвуковых волн, излучаемых от опрашивающего устройства 106, как будет дополнительно описано ниже относительно фиг. 5-6. Например, имплантируемое устройство 120 может включать в себя один или более ультразвуковых преобразователей 122, сконфигурированных, чтобы принимать ультразвуковые волны УЗ-луча 110 и преобразовывать механическую энергию ультразвуковых волн в электрическую энергию, чтобы питать энергией и задействовать имплантируемое устройство 120. Например, имплантируемое устройство 120 может включать в себя один или более датчиков 124, которые могут управляться, чтобы обнаруживать или измерять физиологическое состояние пациента. Чем лучше выровнен этот УЗ-луч 110 с имплантируемым устройством 120, т.е. фокусная точка 112 находится ближе к имплантируемому устройству 120, тем больше механической энергии один или более ультразвуковых преобразователей 122 имплантируемого устройства 120 могут извлекать из ультразвуковых волн УЗ-луча 110.
[0057] В некоторых вариантах осуществления, чтобы предоставлять возможность опрашивающему устройству 106 отслеживать или обнаруживать имплантируемое устройство 120 с помощью ультразвуковых волн, имплантируемое устройство 120 может быть сконфигурировано, чтобы беспроводным образом связываться с опрашивающим устройством 106 посредством ультразвуковой связи. В частности, и как будет дополнительно описано ниже относительно фиг. 6, имплантируемое устройство 120 может быть сконфигурировано, чтобы модулировать электрический сигнал ультразвукового преобразователя 122, чтобы внедрять сигнал импланта в ультразвуковое обратно рассеянное излучение 124. В некоторых вариантах осуществления, сигнал импланта может включать в себя информацию, полученную или сформированную имплантируемым устройством 120. Например, имплантируемое устройство 120 может внедрять информацию, указывающую показатели измерений, сформированные датчиками 124. В других вариантах осуществления, сигнал импланта может включать в себя предварительно определенный шаблон, ассоциированный с имплантируемым устройством 120.
[0058] В некоторых вариантах осуществления, опрашивающее устройство 106 может быть сконфигурировано, чтобы переключаться между режимом передачи и режимом приема, чтобы излучать и принимать ультразвуковые волны, соответственно. В режиме передачи, опрашивающее устройство 106 может излучать УЗ-луч 110. В режиме приема, опрашивающее устройство 106 может быть сконфигурировано, чтобы принимать и анализировать ультразвуковое обратно рассеянное излучение 124. В некоторых вариантах осуществления, как будет дополнительно описано ниже, опрашивающее устройство 106 может извлекать сигнал импланта из принимаемого ультразвукового обратно рассеянного излучения 124, чтобы определять, регулировать ли и как позицию фокусной точки 112, чтобы увеличивать совмещение между УЗ-лучом 110 и имплантируемым устройством 120. Например, опрашивающее устройство 106 может определять и наблюдать за силой сигнала для извлеченного сигнала импланта, чтобы определять, как регулировать позицию фокусной точки 112. В некоторых вариантах осуществления, опрашивающее устройство 106 может принимать ультразвуковое обратное рассеянное излучение 124 посредством формирования луча для приема. На основе принятого ультразвукового обратно рассеянного излучения 124 опрашивающее устройство 106 может оценивать местоположение имплантируемого устройства 102 и направлять фокусную точку 112 в направлении оцененного местоположения.
[0059] В некоторых вариантах осуществления, опрашивающее устройство 106 может быть сконфигурировано, чтобы обнаруживать имплантируемое устройство 120, анализируя то, принимается ли сигнал импланта в ультразвуковом обратно рассеянном излучении 124. Например, имплантируемое устройство 120 может быть первоначально в выключенном состоянии. В некоторых вариантах осуществления, опрашивающее устройство 106 может быть сконфигурировано, чтобы проводить свой УЗ-луч 110 через множество фокусных точек в области 102, чтобы подавать достаточно ультразвуковой мощности, чтобы вынуждать имплантируемое устройство 120 переходить из выключенного состояния во включенное состояние. В некоторых вариантах осуществления, во время фазы запуска, имплантируемое устройство 120 может быть сконфигурировано, чтобы внедрять, в ультразвуковое обратно рассеянное излучение 124, сигнал импланта, идентифицирующий имплантируемое устройство 120. В некоторых вариантах осуществления, опрашивающее устройство 106 может оценивать, насколько вероятно сигнал импланта присутствует в принятом ультразвуковом обратно рассеянном излучении во множестве фокусных точек, чтобы оценивать местоположение и, следовательно, обнаруживать первоначально выключенное имплантируемое устройство.
[0060] Фиг. 2 иллюстрирует панель 210A-C, показывающую фрагменты излучаемых ультразвуковых волн для питания энергией имплантируемого устройства, согласно некоторым вариантам осуществления. Например, ультразвуковые волны, показанные в панелях 210A-C, могут излучаться опрашивающим устройством 106 на фиг. 1 (или опрашивающим устройством 502 на фиг. 5) в УЗ-луче 110.
[0061] Панель 210A показывает, что излучаемые ультразвуковые волны включают в себя последовательность команд в виде ультразвуковых волн, таких как команды 202A и 202B в виде ультразвуковых волн. В некоторых вариантах осуществления команда в виде ультразвуковой волны может быть принята и декодирована имплантируемым устройством, принимающим ультразвуковые волны, чтобы управлять операциями имплантируемого устройства. Например, команды в виде ультразвуковых волн могут включать в себя команду включения питания имплантируемого устройства из выключенного состояния во включенное состояние. Другие примерные команды в виде ультразвуковых волн могут включать в себя команду опроса имплантируемого устройства, чтобы обнаруживать физиологическое состояние субъекта и/или передавать обнаруженное состояние обратно опрашивающему устройству через излучаемое ультразвуковое обратно рассеянное излучение.
[0062] В некоторых вариантах осуществления, каждая из команд в виде ультразвуковых волн может включать в себя предварительно определенный шаблон из одного или более импульсов ультразвуковых волн (т.е. также известны как ультразвуковые импульсы). Например, панель 210B показывает увеличенный в масштабе вид команды 202B в виде ультразвуковой волны, которая может включать в себя последовательность трех ультразвуковых импульсов (например, импульсы 204A-B). Только в целях иллюстрации, амплитуда (т.е. амплитуда давления) и ширина импульса (т.е. также называемая длительностью импульса или продолжительностью импульса) каждого импульса в команде 202B в виде ультразвуковой волны показаны как различающиеся, но этого может и не быть. В некоторых вариантах осуществления, амплитуда или ширина импульса для каждого ультразвукового импульса может быть продиктована протоколом ультразвуковой волны, реализованным опрашивающим устройством. Следовательно, амплитуды и ширина импульса для импульсов могут быть одинаковыми или различными в зависимости от протокола ультразвуковой волны. В некоторых вариантах осуществления, каждая уникальная команда в виде ультразвуковой волны может включать в себя предварительно определенный шаблон, уникально идентифицирующий команду в виде ультразвуковой волны. Предварительно определенный шаблон может содержать ряд импульсов, каждый из которых имеет особые характеристики (например, амплитуду и ширину импульса).
[0063] В некоторых вариантах осуществления, каждый из ультразвуковых импульсов может включать в себя один или более периодов несущей частоты (т.е. также известны как циклы вибрации или колебания или несущие волны). Когда используется в настоящем описании в данном документе, период несущей частоты может соответствовать одиночному колебанию ультразвуковых волн. Например, панель 210C показывает вид в увеличенном масштабе ультразвукового импульса 204A, который включает в себя пять периодов несущей частоты (например, ультразвуковые циклы 206A-B), которые содержат продолжительность 208 импульса для ультразвукового импульса 204A. В некоторых вариантах осуществления, единственный ультразвуковой импульс может включать в себя волновую картину, содержащую множество периодов несущей частоты, чтобы кодировать конкретную информацию, такую как конкретная команда в виде ультразвуковой волны. Например, волновая картина может включать в себя множество периодов несущей частоты, в которых, по меньшей мере, два периода несущей частоты имеют различные длины волн или различные амплитуды. Как обсуждалось выше, характеристики сигнала для множества периодов несущей частоты в ультразвуковом импульсе 204A могут быть продиктованы протоколом ультразвуковой волны, чтобы представлять конкретные команды в виде ультразвуковых волн. В некоторых вариантах осуществления, разрешая периодам несущей частоты ультразвукового импульса 204A быть неравномерными, больше типов команд в виде ультразвуковых волн может быть закодировано для связи с имплантируемыми устройствами.
[0064] Фиг. 3 иллюстрирует панели, показывающие, как опрашивающее устройство (например, опрашивающее устройство 106) обрабатывает ультразвуковое обратно рассеянное излучение, принимаемое в опрашивающем устройстве, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, имплантируемое устройство (например, имплантируемое устройство 120 на фиг. 1 или имплантируемое устройство 602 на фиг. 6) может быть сконфигурировано, чтобы излучать ультразвуковое обратно рассеянное излучение, как показано в панели 306, в ответ на прием ультразвуковых волн, таких как волны, описанные выше относительно панели 210A на фиг. 2. Как описано выше относительно фиг. 1, имплантируемое устройство может быть сконфигурировано, чтобы модулировать электрический сигнал одного или более своих измерительных преобразователей, чтобы кодировать данные импланта в излучаемом ультразвуковом обратном рассеянном излучении. Как будет дополнительно описано ниже относительно фиг. 6, данные импланта могут включать в себя реакцию на команду в виде ультразвуковой волны. Например, данные импланта могут включать в себя данные датчика, измеренные в имплантируемом устройстве. В другом примере, данные импланта могут включать в себя уникальный идентификатор имплантируемого устройства (например, серийный номер).
[0065] Панель 306 показывает ультразвуковое обратное рассеянное излучение, принимаемое в опрашивающем устройстве от имплантируемого устройства. В некоторых вариантах осуществления ультразвуковое обратно рассеянное излучение может соответствовать обратному рассеянному излучению ультразвуковых волн, передаваемых имплантируемому устройству, как показано в панели 210A на фиг. 2. Как показано в панели 306, ультразвуковое обратно рассеянное излучение может включать в себя обратно рассеянные фрагменты 302A-B, которые соответствуют обратно рассеянному излучению фрагментов команды рабочего режима для передаваемых ультразвуковых волн на панели 210A. В некоторых вариантах осуществления, в конце цикла передачи, опрашивающее устройство может быть сконфигурировано, чтобы управлять переключателем (например, переключателем 529 на фиг. 5), чтобы отсоединять модуль передачи и соединять модуль приема для приема ультразвукового обратно рассеянного излучения.
[0066] Панель 308 показывает вид в увеличенном масштабе обратно рассеянного излучения ультразвукового импульса 304, которое может быть проанализировано для извлечения данных, закодированных имплантируемым устройством в обратно рассеянное излучение 304. В некоторых вариантах осуществления, обратно рассеянное излучение 304 может быть проанализировано посредством обработки 310 аналогового сигнала. В некоторых вариантах осуществления, обратно рассеянное излучение 304 может быть проанализировано посредством обработки 312 цифрового сигнала.
[0067] В некоторых вариантах осуществления, обработка 310 аналогового сигнала включает в себя последовательность этапов, показанных на панелях 310A-C. Например, как показано на панели 310A, ультразвуковое обратно рассеянное излучение 304 может быть отфильтровано. В некоторых вариантах осуществления, ультразвуковые волны, передаваемые опрашивающим устройством, отражаются от имплантируемого устройства, например, поверхности ультразвукового преобразователя имплантируемого устройства. Амплитуда волн обратно рассеянного излучения, отраженных от поверхности измерительного преобразователя, может изменяться как функция изменений в зависимости от тока, возвращающегося к ультразвуковому преобразователю, и может называться "ответным обратно рассеянным излучением", поскольку это обратно рассеянное излучение кодирует информацию, сформированную в имплантируемом устройстве. Например, характеристики амплитуды для фрагментов ультразвукового обратно рассеянного излучения, показанные на панели 310A, могут зависеть от того, как имплантируемое устройство модулирует электрический сигнал ультразвукового преобразователя. Эти изменения могут предоставлять возможность опрашивающему устройству лучше совмещать УЗ-луч с имплантируемым устройством, чтобы увеличивать отдачи мощности, также как надежность ультразвуковой связи, как будет дополнительно описано ниже. Дальнейший анализ отфильтрованного обратно рассеянного излучения может включать в себя выпрямление ультразвукового обратно рассеянного излучения, как показано на панели 310B, и интегрирование выпрямленного сигнала для декодирования данных, как показано на панели 310C.
[0068] В некоторых вариантах осуществления, обработка 312 цифрового сигнала включает в себя последовательность этапов, показанных на панелях 312A-B. Аналогично панели 310A, панель 312A показывает вид в увеличенном масштабе отфильтрованного обратно рассеянного излучения 304. Как описано выше относительно фиг. 1 и будет дополнительно описано ниже относительно фиг. 6, имплантируемое устройство может модулировать свой акустический импеданс посредством шунтирования своего пьезоэлектрического ультразвукового преобразователя через управляемый цифровым образом переключатель, где высокий уровень соответствует разомкнутой конфигурации, а низкий уровень соответствует замкнутой конфигурации. Панель 312A показывает различие в амплитуде отфильтрованных сигналов обратно рассеянного излучения 304 в зависимости от того, находится ли измерительный преобразователь имплантируемого устройства в закороченной/замкнутой или разомкнутой конфигурации. В некоторых вариантах осуществления, имплантируемое устройство может управлять электродами ультразвукового преобразователя, чтобы они были в закороченной и разомкнутой конфигурациях, чтобы внедрять данные импланта в обратно рассеянное излучение. Изменение в импедансе вследствие деятельности переключателя приводит в результате к пиковой амплитуде обратно рассеянного излучения, которая на 11,5 мВ больше в разомкнутой конфигурации переключателя по сравнению с замкнутой конфигурацией переключателя - глубина модуляции равна 6,45%.
[0069] В некоторых вариантах осуществления, имплантируемое устройство может быть сконфигурировано, чтобы реализовывать линейный код для управления активностью переключателя ультразвукового преобразователя, чтобы внедрять цифровые данные. Например, линейный код может включать в себя однополярный, полярный, биполярный или манчестерский код. Опрашивающее устройство может быть сконфигурировано с возможностью декодировать линейный код, используемый имплантируемым устройством, чтобы декодировать цифровые данные. Например, панель 312B показывает модулированные значения на измерительном преобразователе и соответствующие извлеченные значения модуляции измерительного преобразователя имплантируемого устройства. Абсолютное значение и запас помехоустойчивости для извлеченных значений сигнала зависят от множества факторов, таких как расстояние до имплантируемого устройства, ориентация и размер; однако, извлеченная форма волны остается характерной для модулированного сигнала имплантируемого устройства, изменяясь по коэффициенту линейного масштабирования. Например, имплантируемое устройство может реализовывать кодирование без возврата к нулевому уровню с амплитудно-импульсной модуляцией, посредством которого 11-символьное ASCII-сообщение ("привет, мир") может быть передано опрашивающему устройству. В частности, как показано на панели 312B, опрашивающее устройство может различать между двумя состояниями измерительного преобразователя для замкнутой или разомкнутой конфигураций на основе извлеченных напряжений модуляции обратно рассеянного излучения. Эти извлеченные состояния измерительного преобразователя могут быть преобразованы в двоичные значения 0 и 1 для кодирования цифровых данных. В некоторых вариантах осуществления, обработка 312 цифрового сигнала может быть преимущественной по сравнению с подходом с обработкой 310 аналогового сигнала, поскольку протоколы линейного кодирования, реализуемые имплантируемым устройством, могут увеличивать надежность ультразвуковой связи между имплантируемым устройством и опрашивающим устройством.
[0070] В некоторых вариантах осуществления, информация, передаваемая имплантируемым устройством и внедренная в излучаемое ультразвуковое обратно рассеянное излучение, может включать в себя различные данные, которые могут быть оцифрованы. В некоторых вариантах осуществления, информация может включать в себя данные, собранные или сформированные имплантируемым устройством. Например, информация может включать в себя данные датчиков, такие как температура, давление, pH, перенапряжение, наличие или количество анализируемого вещества или электрофизиологического сигнала, такого как потенциал действия нерва.
[0071] Фиг. 4A иллюстрирует примерную схему 400A, которая показывает, как опрашивающее устройство (например, опрашивающее устройство 106 на фиг. 1) управляет местом, куда ультразвуковой (УЗ) луч фокусируется, чтобы обнаруживать и питать энергией имплантируемое устройство 402, согласно некоторым вариантам осуществления. Например, схема 400A показывает область (например, область 102), в которой имплантируемое устройство 402 имплантируется в субъекте или пациенте.
[0072] В некоторых вариантах осуществления, в режиме обнаружения, опрашивающее устройство может быть сконфигурировано, чтобы направлять УЗ-луч для фокусировки на множестве фокусных точек 404A-D в диапазоне 404. Например, опрашивающее устройство может проводить УЗ-луч в линейном направлении от фокусной точки 404A по направлению к фокусной точке 404D. В некоторых вариантах осуществления, опрашивающее устройство может удерживать УЗ-луч в каждой фокусной точке в течение интервала времени, который позволяет имплантируемому устройству 402, если располагается в пределах порогового расстояния от фокусной точки, включаться из выключенного состояния.
[0073] В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано, чтобы проводить УЗ-луч во множестве диапазонов, включающих в себя 406 и 408. Например, в каждом диапазоне, опрашивающее устройство может последовательно направлять УЗ-луч, чтобы фокусироваться на множестве фокусных точек (например, фокусных точках 406A-406D) в линейном направлении, как показано в диапазоне 406.
[0074] В некоторых вариантах осуществления, после того как имплантируемое устройство 402 принимает достаточно энергии из УЗ-луча, имплантируемое устройство 402 может быть сконфигурировано, чтобы внедрять сигнал, включающий в себя предварительно определенный шаблон, в излучаемое ультразвуковое обратно рассеянное излучение, чтобы транслировать его присутствие. Например, предварительно определенный шаблон может быть ассоциирован с имплантируемым устройством 402 и может уникально идентифицировать имплантируемое устройство, согласно некоторым вариантам осуществления.
[0075] В зависимости от расстояния между имплантируемым устройством 402 и фокусной точкой УЗ-луча, сила сигнала для внедренного сигнала, который принимается опрашивающим устройством, будет изменяться. Если расстояние является слишком большим, внедренный сигнал может не быть легко отличен от шума. В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано, чтобы изучать ультразвуковое обратно рассеянное излучение, принимаемое для каждой из фокусных точек 404A-404D, 406A-406D и 408A-408C, чтобы определять вероятность того, что предварительно определенный шаблон, ассоциированный с имплантируемым устройством 402, обнаруживается в каждом из ультразвуковых обратно рассеянных излучений. Затем опрашивающее устройство может быть сконфигурировано статистически определять вероятное местоположение имплантируемого устройства, как будет дополнительно описано ниже.
[0076] Например, опрашивающее устройство может определять, что предварительно определенный шаблон наиболее вероятно присутствует в ультразвуковых обратно рассеянных излучениях, принимаемых для фокусных точек 404B и 404C. На основе этого определения опрашивающее устройство может оценивать местоположение имплантируемого устройства 402 как близкое к фокусным точкам 404B и 404C.
[0077] Фиг. 4B иллюстрирует примерную схему 400B, которая показывает, как опрашивающее устройство (например, опрашивающее устройство 106 на фиг. 1) управляет местом, куда УЗ-луч фокусируется, чтобы эффективно отслеживать имплантируемое устройство 410, согласно некоторым вариантам осуществления. Например, схема 400B показывает область (например, область 102), в которой имплантируемое устройство 411 имплантируется в субъекте или пациенте.
[0078] В некоторых вариантах осуществления, опрашивающее устройство может осуществлять приращение позиции фокуса луча для испускаемого УЗ-луча в линейном направлении 412. Например, опрашивающее устройство может последовательно направлять УЗ-луч, чтобы фокусироваться на множестве фокусных точек 412A-C в диапазоне 412. В каждой из фокусных точек 412A-C опрашивающее устройство может принимать соответствующее ультразвуковое обратно рассеянное излучение. Как описано выше, имплантируемое устройство 410 может быть сконфигурировано, чтобы кодировать, в ультразвуковом обратно рассеянном излучении, сигнал импланта, ассоциированный с имплантируемым устройством 410. Например, сигнал импланта может быть предварительно определенным шаблоном, ассоциированным с имплантируемым устройством 110. В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано, чтобы извлекать сигнал импланта из ультразвукового обратно рассеянного излучения и определять силу сигнала для извлеченного сигнала.
[0079] В некоторых вариантах осуществления, сила сигнала представляет соотношение сигнал-шум, определенное из ультразвукового обратно рассеянного излучения. В некоторых вариантах осуществления, в каждой фокусной точке, опрашивающее устройство может быть сконфигурировано передавать множество ультразвуковых импульсов, а имплантируемое устройство может быть сконфигурировано кодировать информацию в ультразвуковом обратно рассеянном излучении согласно фрагменту таких ультразвуковых импульсов. Соответственно, опрашивающее устройство может сравнивать извлеченный сигнал с ультразвуковым обратно рассеянным излучением, которое не включает в себя извлеченный сигнал, чтобы определять силу сигнала. В некоторых вариантах осуществления, имплантируемое устройство может быть сконфигурировано, чтобы переключаться между пассивным режимом, в котором модуляция сигнала не происходит, и активным режимом, в котором модуляция происходит. В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано, чтобы сравнивать первый обратно рассеянный сигнал, соответствующий отсутствию модуляции сигнала, со вторым обратно рассеянным сигналом, соответствующим модуляции сигнала, чтобы подавлять окружающие помехи или шум. Например, опрашивающее устройство может быть сконфигурировано, чтобы вычитать первый обратно отраженный сигнал (т.е. пассивную отражающую способность, когда модуляция не происходит) из второго обратно рассеянного сигнала, так что окружающий шум может быть подавлен.
[0080] В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано, чтобы определять силу сигнала для отфильтрованного обратно рассеянного сигнала посредством определения глубины модуляции или изменения амплитуды обратно рассеянного сигнала. Например, опрашивающее устройство может определять процент изменения амплитуды обратно рассеянного сигнала, чтобы определять силу сигнала.
[0081] В некоторых вариантах осуществления, после того как опрашивающее устройство определяет, что сила сигнала для фокусной точки, например, фокусной точки 412C, превышает предварительно определенное значение, опрашивающее устройство определяет, что фокусная точка находится в пределах "близкого" расстояния от имплантируемого устройства 410. Соответственно, опрашивающее устройство может входить в состояние оптимизации сигнала, в котором опрашивающее устройство прирастающим образом регулирует позицию фокуса луча, чтобы приближаться к местоположению имплантируемого устройства 410.
[0082] В некоторых вариантах осуществления, опрашивающее устройство может оценивать местоположение имплантируемого устройства 410 на основе формирования луча для приема. На основе этого местоположения опрашивающее устройство может выполнять приращение позиции фокусной точки 412C в направлении 416A в фокусной точке 414A. После этого, опрашивающее устройство может аналогично определять силу сигнала ультразвукового обратно рассеянного излучения, принятого в обновленной фокусной точке, чтобы определять, увеличивается ли сила сигнала, т.е. выше ли силы сигнала, определенной в предыдущей фокусной точке. Соответственно, опрашивающее устройство может прирастающим образом регулировать фокусную точку из фокусной точки 414A в 414E в соответствующих направлениях 416B-414E до тех пор, пока опрашивающее устройство не определит, что сила извлеченного сигнала больше не увеличивается. В этот момент, опрашивающее устройство может определять, что фокусная точка 414E близко совмещается с истинным местоположением имплантируемого устройства 410, поскольку сила извлеченного сигнала находится на локальном максимуме.
[0083] В некоторых вариантах осуществления, после того как эта фокусная точка 414E определяется, опрашивающее устройство может быть сконфигурировано, чтобы поддерживать фокус луча для УЗ-луча в фокусной точке 414E до тех пор, пока имплантируемое устройство 410 не станет смещенным от опрашивающего устройства. Например, вследствие движения оператора опрашивающего устройства и движения субъекта, в которого имплантируемое устройство 410 имплантируется, расстояние между имплантируемым устройством 410 и фокусной точкой 414E может превышать пороговое расстояние, представляющее приемлемое расстояние. В некоторых вариантах осуществления, опрашивающее устройство может определять, возникает ли такое смещение, наблюдая за силой сигнала, извлекаемого из ультразвукового обратно рассеянного излучения, в то время как УЗ-луч нацелен на фокусную точку 414E. В некоторых вариантах осуществления, опрашивающее устройство может повторно входить в режим отслеживания, чтобы регулировать фокус луча, после того как смещение было обнаружено.
[0084] Фиг. 5 иллюстрирует систему 500, включающую в себя опрашивающее устройство 502, сконфигурированное, чтобы питать энергией одно или более имплантируемых устройств 540 с помощью ультразвуковых волн, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, опрашивающее устройство 502 может быть примером опрашивающего устройства 106, которое описано относительно фиг. 1.
[0085] В некоторых вариантах осуществления, опрашивающее устройство 502 включает в себя источник 503 питания, вычислительную схему 510, схему 520 формирования сигнала и схему 504 ультразвукового преобразователя. Как показано, источник 503 питания может быть сконфигурирован, чтобы питать вычислительную схему 510 и схему 520 формирования сигнала. В некоторых вариантах осуществления, источник 503 питания может предоставлять 1,8 В, хотя любое подходящее напряжение может быть использовано. Например, источник 503 питания может включать в себя один или более аккумуляторов, чтобы подавать 1,8 В.
[0086] В некоторых вариантах осуществления, схема 520 формирования сигнала включает в себя генератор 522 подкачки заряда, сконфигурированный, чтобы питать один или более каналов 524. В некоторых вариантах осуществления, генератор 522 подкачки заряда может быть сконфигурирован, чтобы увеличивать напряжение, предоставляемое источником 503 питания. Например, генератор 522 подкачки заряда может увеличивать 1,8 В, подаваемые источником 503 питания, до 32 В. В некоторых вариантах осуществления, как будет дополнительно описано ниже, схема 520 формирования сигнала может индивидуально питать и управлять каждым ультразвуковым преобразователем 508 из массива 504 преобразователей, чтобы формировать и излучать УЗ-луч, чьи ультразвуковые волны сужаются в фокусную точку (например, фокусную точку 112 УЗ-луча 110, показанную на фиг. 1).
[0087] В некоторых вариантах осуществления, каждый канал 524 соединяется с и управляет работой соответствующего ультразвукового преобразователя 508 схемы 504 преобразователя. В некоторых вариантах осуществления, ультразвуковой преобразователь 508, соединенный с каналом 524, может быть сконфигурирован, только чтобы принимать или только передавать ультразвуковые волны, в таком случае переключатель 529 может быть необязательно опущен из канала 524. В некоторых вариантах осуществления, каждый канал 524 может включать в себя следующие электронные компоненты: регулятор 526 задержки, устройство 528 сдвига уровня и переключатель 529.
[0088] В некоторых вариантах осуществления, регулятор 526 задержки может быть сконфигурирован, чтобы регулировать формы волн и/или сигналы ультразвуковых волн, передаваемых ультразвуковым преобразователем 508. В некоторых вариантах осуществления, регулятор 526 задержки может регулировать, например, сдвиг по фазе, временную задержку, частоту импульсов, форму волны (включающую в себя амплитуду и длину волны) или их сочетание на основе команд от схемы 512 контроллера, чтобы формировать форму волны для передачи. В некоторых вариантах осуществления, данные, представляющие форму волны и частоту для каждого канала, могут быть сохранены в 'волновой таблице', сохраненной в регуляторе 526 задержки или памяти 516. Это может предоставлять возможность форме волны для передачи по каждому каналу 524 быть различной.
[0089] В некоторых вариантах осуществления, регулятор 526 задержки может быть соединен с устройством 528 сдвига уровня, которое конфигурируется, чтобы сдвигать входные импульсы от регулятора 526 задержки до более высокого напряжения, используемого ультразвуковым преобразователем 508, чтобы передавать ультразвуковые волны. В некоторых вариантах осуществления, регулятор 526 задержки и устройство 528 сдвига уровня могут быть сконфигурированы, чтобы использоваться для потоковой передачи данных в фактических передаваемых сигналах для массива 506 измерительных преобразователей. В некоторых вариантах осуществления, массив 506 измерительных преобразователей может быть линейным массивом ультразвуковых преобразователей. В других вариантах осуществления, массив 506 измерительных преобразователей может быть 2D-массивом ультразвуковых преобразователей. В некоторых вариантах осуществления, массив 506 измерительных преобразователей может включать в себя фазированный массив линейных ультразвуковых преобразователей. В других вариантах осуществления, массив 506 измерительных преобразователей может включать в себя линейный искривленный массив или криволинейный массив ультразвуковых преобразователей. В некоторых вариантах осуществления, форма волны для передачи для каждого канала 524 может быть создана непосредственно путем высокоскоростного последовательного вывода микроконтроллера или другой цифровой системы и отправлена элементу преобразователя (например, ультразвуковому преобразователю 508) через устройство 528 сдвига уровня или высоковольтной усилитель.
[0090] В некоторых вариантах осуществления, переключатель 529 канала 524 может конфигурировать соответствующий ультразвуковой преобразователь 508 для приема ультразвуковых волн, таких как ультразвуковое обратно рассеянное излучение. В некоторых вариантах осуществления, принятые ультразвуковые волны преобразуются в электрический ток посредством ультразвукового преобразователя 508 (установленного в режим приема) и передаются процессору 511 обработки данных для обработки данных, захваченных в принятых ультразвуковых волнах. Например, процессор 511 для обработки данных может быть сконфигурирован, чтобы реализовывать формирование луча для приема, чтобы предоставлять возможность опрашивающему устройству 502 рассчитывать и определять местоположение имплантируемых устройств 540. В некоторых вариантах осуществления, усилитель, аналого-цифровой преобразователь (ADC), усилитель с регулируемым коэффициентом усиления или усилитель с регулируемым коэффициентом усиления с дифференциальной регулировкой усиления, который компенсирует потерю в тканях, и/или широкополосный фильтр могут содержаться для обработки принятых ультразвуковых волн.
[0091] В некоторых вариантах осуществления, канал 524, описанный выше, не включает в себя T/Rx-переключатель 529, а вместо этого содержит независимые Tx (передача) и Rx (прием) с высоковольтной Rx (схемой приемника) в форме малошумящего усилителя с хорошим восстановлением насыщения. В некоторых вариантах осуществления, T/Rx-схема включает в себя циркулятор. В некоторых вариантах осуществления, массив 506 измерительных преобразователей включает в себя больше элементов преобразователей (например, ультразвуковой преобразователь 508) по сравнению с каналами 524 обработки, и опрашивающее устройство 502 может быть сконфигурировано, чтобы включать в себя мультиплексор, чтобы выбирать различные наборы передающих элементов для каждого импульса. Например, 64 канала передачи/приема могут быть соединены через 3:1 мультиплексор со 192 физическими элементами преобразователей - при этом только 64 элемента преобразователей активизируют заданный импульс.
[0092] В некоторых вариантах осуществления, опрашивающее устройство 502 может включать в себя датчик 530 движения, который может включать в себя один или более датчиков движения. В некоторых вариантах осуществления, датчик 530 движения может быть сконфигурирован, чтобы обнаруживать и измерять движение опрашивающего устройства 502. Например, опрашивающее устройство 502 может перемещаться вследствие движения или дрожания руки оператора опрашивающего устройства 502. В некоторых вариантах осуществления, датчик 530 движения может включать в себя одно или более из акселерометра, гироскопа или инерциального блока движения (IMU).
[0093] В некоторых вариантах осуществления, вычислительная схема 510 может быть цифровой схемой, аналоговой схемой или смешанной сигнальной интегральной схемой. Примеры вычислительной схемы 510 могут включать в себя микропроцессор, конечный автомат (FSM), программируемую пользователем вентильную матрицу (FPGA) и микроконтроллер. В некоторых вариантах осуществления, опрашивающее устройство 502 может включать в себя энергозависимую память, к которой может осуществлять доступ вычислительная схема 510.
[0094] В некоторых вариантах осуществления, вычислительная схема 510 включает в себя схему 512 контроллера, процессор 511 для обработки данных и пользовательский интерфейс 513. В некоторых вариантах осуществления, схема 512 контроллера включает в себя генератор 514 команд, модуль 517 отслеживания импланта и память 516, хранящую настройки 518 ультразвуковой волны.
[0095] В некоторых вариантах осуществления, генератор 514 команд может быть сконфигурирован, чтобы формировать инструкции для управления работой регулятора 526 задержки, чтобы передавать одну или более команд рабочего режима одному или более имплантируемым устройствам 540, чтобы задействовать одно или более имплантируемых устройств 540. Например, команда рабочего режима может инструктировать имплантируемому устройству (например, имплантируемому устройству 542) прием команды рабочего режима, чтобы выгружать некоторые данные устройства или загружать данные, закодированные в команде рабочего режима.
[0096] В некоторых вариантах осуществления, модуль 517 отслеживания импланта может быть сконфигурирован, чтобы работать во множестве режимов, чтобы отслеживать имплантируемые устройства 540. В некоторых вариантах осуществления, модуль 517 отслеживания импланта может работать в режиме обнаружения, чтобы обнаруживать первоначально выключенное имплантируемое устройство 542, как будет дополнительно описано ниже относительно фиг. 7. В некоторых вариантах осуществления, модуль 517 отслеживания импланта может работать в режиме отслеживания, чтобы отслеживать местоположение имплантируемого устройства 542, как будет дополнительно описано ниже относительно фиг. 8-11. В некоторых вариантах осуществления, модуль 517 отслеживания импланта может быть сконфигурирован, чтобы анализировать данные о перемещении, сформированные датчиком 530 движения, чтобы определять, следует ли и как регулировать фокус луча для УЗ-луча, чтобы противодействовать перемещению опрашивающего устройства 502, вызванному оператором. В обоих режимах, модуль 517 отслеживания импланта может быть сконфигурирован, чтобы управлять схемой 504 ультразвукового преобразователя, чтобы изменять фокусную точку излучаемого УЗ-луча.
[0097] В некоторых вариантах осуществления, данные устройства, принятые и обработанные процессором 511 для обработки данных, могут включать в себя информацию, внедренную имплантируемым устройством 542 в принятое ультразвуковое обратно рассеянное излучение. В этих вариантах осуществления, генератор 514 команд может быть сконфигурирован, чтобы задавать или выбирать настройки ультразвуковой волны, чтобы управлять ультразвуковыми преобразователями из массива 504 преобразователей, чтобы изменять или сохранять фокусную точку для излучаемого УЗ-луча.
[0098] В некоторых вариантах осуществления, схема 504 преобразователя включает в себя один или более ультразвуковых преобразователей 508, сконфигурированных, чтобы передавать ультразвуковые волны для питания имплантируемых устройств 540, таких как имплантируемое устройство 542. В некоторых вариантах осуществления, как показано на фиг. 5, схема 504 преобразователя включает в себя массив 506 преобразователей, имеющий множество ультразвуковых преобразователей 508. В некоторых вариантах осуществления, массив 506 преобразователей включает в себя 1 или более, 2 или более, 3 или более, 5 или более, 7 или более, 10 или более, 15 или более, 20 или более, 25 или более, 50 или более, 100 или более, 250 или более, 500 или более, 1000 или более, 2500 или более, 5000 или более или 10000 или более ультразвуковых преобразователей. В некоторых вариантах осуществления массив 206 преобразователей включает в себя 100000 или менее, 50000 или менее, 25000 или менее, 10000 или менее, 5000 или менее, 2500 или менее, 1000 или менее, 500 или менее, 200 или менее, 150 или менее, 100 или менее, 90 или менее, 80 или менее, 70 или менее, 60 или менее, 50 или менее, 40 или менее, 30 или менее, 25 или менее, 20 или менее, 15 или менее, 10 или менее, 7 или менее или 5 или менее ультразвуковых преобразователей. Массив 506 преобразователей может быть, например, интегральной схемой, содержащей 50 или более пикселов ультразвуковых преобразователей.
[0099] Как показано на фиг. 5, схема 504 преобразователя включает в себя единственный массив 506 преобразователей; схема 504 преобразователя, однако, может включать в себя 1 или более, 2 или более или 3 или более отдельных массивов преобразователей, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, схема 504 преобразователя включает в себя 10 или менее массивов преобразователей (например, 9, 8, 7, 6, 5, 4, 3, 2 или 1 массив преобразователей). В некоторых вариантах осуществления, отдельные массивы преобразователей могут быть размещены в различных точках субъекта и могут связываться с некоторыми или различными имплантируемыми устройствами 540. В некоторых вариантах осуществления, массивы преобразователей могут быть расположены на противоположных сторонах имплантируемого устройства, такого как имплантируемое устройство 542.
[00100] В некоторых вариантах осуществления, конкретное конструктивное исполнение массива 506 преобразователей опрашивающего устройства 502 зависит от желательной глубины проникновения, размера апертуры и размера отдельных ультразвуковых преобразователей 508 в массиве 506 преобразователей. Релеевское расстояние, R, массива 506 преобразователей вычисляется как:
где D является размером апертуры, а λ является длиной волны ультразвука в среде распространения (т.е. ткани). Как известно на уровне техники, релеевское расстояние является расстоянием, на котором луч, излучаемый массивом 506 преобразователей, полностью формируется. Т.е. область давления сходится в естественный фокус на релеевском расстоянии, чтобы максимизировать принимаемую мощность. Следовательно, в некоторых вариантах осуществления, имплантируемые устройства 540 могут быть приблизительно на том же расстоянии от массива 506 преобразователей, что и релеевское расстояние.
[0101] Отдельные ультразвуковые преобразователи 508 в массиве 506 преобразователей могут быть модулированы, чтобы регулировать релеевское расстояние и позицию луча ультразвуковых волн, излучаемых массивом 506 преобразователей, посредством процесса формирования луча или управления лучом. Такие методы как формирование луча с линейно ограниченным изменением минимума (LCMV) могут быть использованы для связи множества имплантируемых устройств 540 (например, имплантируемого устройства 542) с внешним ультразвуковым приемопередатчиком. См., например, Бертланд и др., Beamforming Approaches for Untethered, Ultrasonic Neural Dust Motes for Cortical Recording: a Simulation Study, IEEE EMBC (август 2014). В некоторых вариантах осуществления, управление лучом выполняется посредством регулирования мощности или фазы ультразвуковых волн, излучаемых ультразвуковыми преобразователями 508 в массиве 506 преобразователей.
[0102] В некоторых вариантах осуществления, опрашивающее устройство 502 (например, вычислительная схема 510) включает в себя одну или более инструкций для управляющих лучом ультразвуковых волн с помощью одного или более ультразвуковых преобразователей 508, инструкции для определения относительного местоположения одного или более имплантируемых устройств 540, инструкции для наблюдения за относительным перемещением одного или более имплантируемых устройств 540, инструкции для записи относительного перемещения одного или более имплантируемых устройств 540 и инструкции для восстановления методом обращения свертки обратно рассеянного излучения от множества имплантируемых устройств 540.
[0103] В некоторых вариантах осуществления, пользовательский интерфейс 513 может быть сконфигурирован, чтобы предоставлять возможность пользователю (например, врачу или пациенту) управлять операциями опрашивающего устройства 502, чтобы питать энергией или задействовать имплантируемые устройства 540 или связываться с имплантируемыми устройствами 540. В некоторых вариантах осуществления, пользовательский интерфейс 513 может включать в себя устройство ввода, которое предоставляет входные данные, такое как сенсорный экран или монитор, клавиатура, мышь или устройство распознавания речи для опрашивающего устройства 502. В некоторых вариантах осуществления, пользовательский интерфейс 513 может включать в себя устройство вывода, такое как любое подходящее устройство, которое предоставляет выходные данные, такое как сенсорный экран, монитор, принтер, дисковый накопитель или динамик.
[0104] В некоторых вариантах осуществления, опрашивающее устройство 502 может управляться с помощью отдельной компьютерной системы (не показана), такой как мобильное устройство (например, смартфон или планшет). Компьютерная система может беспроводным образом связываться с опрашивающим устройством 502, например, через сетевое соединение, радиочастотное (RF) соединение или Bluetooth. Компьютерная система может, например, включать или выключать опрашивающее устройство 502 или анализировать информацию, закодированную в ультразвуковых волнах, принимаемых опрашивающим устройством 502.
[0105] В некоторых вариантах осуществления, опрашивающее устройство 502 связывается с множеством имплантируемых устройств 540. Это может быть выполнено, например, с помощью теории системы с многоканальным входом, многоканальным выходом. Например, связь между опрашивающим устройством 502 и множеством имплантируемых устройств 540 может быть выполнена с помощью мультиплексирования с временным разделением канала, пространственного мультиплексирования или частотного мультиплексирования. Опрашивающее устройство 502 может принимать объединенное ультразвуковое обратно рассеянное излучение от множества имплантируемых устройств 540, которое может быть восстановлено методом обращения свертки, тем самым, извлекая информацию от каждого имплантируемого устройства 542. В некоторых вариантах осуществления, опрашивающее устройство 502 может быть сконфигурировано, чтобы фокусировать ультразвуковые волны, передаваемые от массива 506 преобразователей, на конкретном имплантируемом устройстве посредством управления лучом. Например, опрашивающее устройство 502 может фокусировать передаваемые ультразвуковые волны на первом имплантируемом устройстве (например, имплантируемом устройстве 542), принимает обратно рассеянное излучение от первого имплантируемого устройства, фокусирует передаваемые ультразвуковые волны на втором имплантируемом устройстве и принимает обратно рассеянное излучение от второго имплантируемого устройства. В некоторых вариантах осуществления, опрашивающее устройство 502 передает ультразвуковые волны множеству имплантируемых устройств 540 и затем принимает ультразвуковое обратно рассеянное излучение от множества ультразвуковых устройств 540.
[0106] В некоторых вариантах осуществления, опрашивающее устройство 502 или один или более ультразвуковых преобразователей 508 являются пригодными для носки. Например, опрашивающее устройство 502 или один или более ультразвуковых преобразователей 508 могут быть прикреплены к телу субъекта пластырем или клеем. В другом примере, опрашивающее устройство 502 может быть зондом, который может удерживаться пользователем (таким как медицинский работник). В некоторых вариантах осуществления, опрашивающее устройство 502 может удерживаться на теле посредством наложения шва, простого поверхностного натяжения, устройства крепления на основе одежды, такого как тканевая обертка, манжет, эластичный бандаж, или посредством подкожного крепления. В некоторых вариантах осуществления, один или более ультразвуковых преобразователей 508 или массив 506 преобразователей опрашивающего устройства 502 могут быть размещены отдельно от остальной части опрашивающего устройства 502. Например, массив 206 преобразователей может быть прикреплен к коже субъекта в первом местоположении (таком как рядом с одним или более имплантируемыми устройствами), а остальная часть опрашивающего устройства 502 может быть расположена во втором местоположении, при этом провод связывает ультразвуковой преобразователь 508 или массив 506 преобразователей с остальной частью опрашивающего устройства 502.
[0107] Фиг. 6 иллюстрирует имплантируемое устройство 604, которое питается энергией и задействуется с помощью ультразвуковых волн, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, имплантируемое устройство 604 может беспроводным образом питаться энергией и задействоваться посредством ультразвуковых волн, передаваемых от опрашивающего устройства 602, как описано выше относительно фиг. 5. В некоторых вариантах осуществления, имплантируемое устройство 604 может быть сконфигурировано, чтобы беспроводным образом связываться с опрашивающим устройством 602 посредством ультразвуковой связи. В некоторых вариантах осуществления, имплантируемое устройство 604 может быть сконфигурировано, чтобы беспроводным образом связываться с одним или более другими имплантируемыми устройствами посредством ультразвуковой связи. В некоторых вариантах осуществления, имплантируемое устройство 604 может быть имплантировано в субъекте, таком как пациент, а опрашивающее устройство 602 может быть отдельным устройством, которое является внешним (т.е. не имплантированным) или полностью имплантированным в субъекте.
[0108] В некоторых вариантах осуществления, чтобы предоставлять возможность имплантируемому устройству 604 питаться энергией и задействоваться с помощью ультразвуковых волн, имплантируемое устройство 604 может включать в себя следующие компоненты устройства: схему 606 ультразвукового преобразователя, схему 612 модуляции и демодуляции, схему 614 стимуляции, схему 616 обнаружения, схему 620 контроллера и схему 630 питания. В некоторых вариантах осуществления, один или более из этих компонентов устройства могут быть реализованы как цифровая схема, аналоговая схема или смешанная сигнальная интегральная схема в зависимости от их операций. Например, схема 620 контроллера может включать в себя микропроцессор, конечный автомат (FSM), программируемую пользователем вентильную матрицу (FPGA) и микроконтроллер.
[0109] В некоторых вариантах осуществления, схема 606 ультразвукового преобразователя включает в себя ультразвуковой преобразователь 608, соединенный с согласующей цепью 610. В некоторых вариантах осуществления, схема 606 ультразвукового преобразователя не включает в себя согласующую цепь 610. В некоторых вариантах осуществления, ультразвуковой преобразователь 608 может быть сконфигурирован, чтобы принимать ультразвуковые волны от опрашивающего устройства 602 и преобразовывать энергию из принятых ультразвуковых волн в электрический сигнал, чтобы питать один или более компонентов устройства для имплантируемого устройства 604. В некоторых вариантах осуществления, электрический сигнал может быть сформирован ультразвуковым преобразователем 608, поскольку вибрации ультразвукового преобразователя 608, вызванные принимаемыми ультразвуковыми волнами, индуцируют напряжение между электрическими клеммами ультразвукового преобразователя 608, которое вызывает протекание электрического тока.
[0110] В некоторых вариантах осуществления, как описано выше, мощность из принимаемых ультразвуковых волн может быть использована имплантируемым устройством 604 для питания своих компонентов устройства; соответственно, эти ультразвуковые волны иногда называются в данном документе питающими ультразвуковыми волнами. В некоторых вариантах осуществления, принимаемые ультразвуковые волны могут кодировать информацию, включающую в себя команды рабочего режима для задействования имплантируемого устройства; соответственно, эти ультразвуковые волны иногда называются в данном документе ультразвуковыми волнами связи. В некоторых вариантах осуществления, аналогично тому, как питающие ультразвуковые волны могут быть обработаны, ультразвуковые волны связи могут быть приняты ультразвуковым преобразователем 608, чтобы формировать электрический сигнал, имеющий электрический ток, который протекает через ультразвуковой преобразователь 608. В некоторых вариантах осуществления, сформированный электрический сигнал кодирует команды рабочего режима в электрическом токе. В некоторых вариантах осуществления, одни и те же ультразвуковые волны могут быть сконфигурированы как для питания имплантируемого устройства 604, так и для кодирования информации для передачи имплантируемому устройству 604. В некоторых вариантах осуществления, как описано ниже относительно фиг. 2, каждая команда рабочего режима может включать в себя один или более ультразвуковых импульсов, и каждый ультразвуковой импульс может включать в себя один или более периодов несущей частоты ультразвуковых волн.
[0111] В некоторых вариантах осуществления, схема 606 ультразвукового преобразователя включает в себя множество ультразвуковых преобразователей, соединенных с множеством соответствующих согласующих цепей. Включая в себя, по меньшей мере, два ультразвуковых преобразователя, имплантируемое устройство 604 может быть сконфигурировано, чтобы питаться посредством электрических сигналов, формируемых, по меньшей мере, двумя ультразвуковыми преобразователями, чтобы более эффективно и согласовано извлекать мощность, предоставляемую опрашивающим устройством 602, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, имплантируемое устройство 604 может быть сконфигурировано, чтобы собирать мощность от одного или более ультразвуковых преобразователей, выбранных из множества ультразвуковых преобразователей. Например, имплантируемое устройство 604 может выбирать ультразвуковой преобразователь, который предоставляет наивысшую мощность или наиболее согласующуюся мощность.
[0112] Например, множество факторов, таких как ориентация ультразвукового преобразователя или мешающий биологический материал между ультразвуковым преобразователем 608 и опрашивающим устройством 602 - источником ультразвуковых волн, могут значительно снижать мощность, принимаемую ультразвуковым преобразователем 608. Посредством добавления одного или более дополнительных ультразвуковых преобразователей уменьшенная мощность, принимаемая в единственном ультразвуковом преобразователе (например, ультразвуковом преобразователе 608), может менее вероятно негативно влиять на операции имплантируемого устройства 604.
[0113] В некоторых вариантах осуществления, включение в себя, по меньшей мере, двух ультразвуковых преобразователей, может предоставлять возможность имплантируемому устройству 604 быть более надежно управляемым с помощью ультразвуковых волн. Например, имплантируемое устройство 604 может быть сконфигурировано, чтобы сравнивать силу сигнала, по меньшей мере, двух ультразвуковых преобразователей и выбирать сигнал, имеющий наивысшую силу сигнала, для управления имплантируемым устройством 604. В некоторых вариантах осуществления, имплантируемое устройство 604 может использовать выбранный ультразвуковой преобразователь для приема связи (т.е. во время нисходящей линии связи) и передачи в обратно рассеянном излучении информации (т.е. во время восходящей линии связи). В некоторых вариантах осуществления, имплантируемое устройство 604 может выбирать первый ультразвуковой преобразователь, по меньшей мере, из двух ультразвуковых преобразователей для приема ультразвуковых сигналов связи для ультразвуковой связи по нисходящей линии связи и выбирать второй ультразвуковой преобразователь, по меньшей мере, из двух ультразвуковых преобразователей для кодирования информации в обратно рассеянном излучении для ультразвуковой связи по восходящей линии связи. В некоторых вариантах осуществления, имплантируемое устройство 604 может быть сконфигурировано, чтобы выполнять формирование луча, по меньшей мере, с двумя ультразвуковыми преобразователями, чтобы улучшать соотношение сигнал-шум для ультразвуковой связи по восходящей и нисходящей линии связи. В некоторых вариантах осуществления, один или более из этих ультразвуковых преобразователей может быть микромеханическим ультразвуковым преобразователем, таким как емкостной микромеханический ультразвуковой преобразователь (CMUT) или пьезоэлектрический микромеханический ультразвуковой преобразователь (PMUT), или может быть объемным пьезоэлектрическим преобразователем. Дополнительно реализации ультразвукового преобразователя 608 описываются ниже относительно фиг. 14.
[0114] В некоторых вариантах осуществления, согласующая цепь 610 может быть электрической схемой, сконфигурированной, чтобы выбирать согласование импеданса между электрическим импедансом ультразвукового преобразователя 608 и электрическим импедансом имплантируемого устройства 604 (например, схемы 630 питания), чтобы снижать отражение сигнала. В некоторых вариантах осуществления, согласующая цепь 610 может быть реализована в различных конфигурациях одного или более элементов цепи, таких как дроссели, конденсаторы, резисторы, диоды, транзисторы или любое их сочетание. Например, согласующая цепь 610 может быть реализована как множество конденсаторов, соединенных параллельно и соединенных с множеством соответствующих переключателей. Посредством управления тем, какой из переключателей является разомкнутым или замкнутым, согласующая цепь 610 может управлять тем, сколько конденсаторов заряжаются, чтобы выбирать импеданс. В некоторых вариантах осуществления, согласующая цепь 610 может быть сконфигурирована, чтобы предоставлять возможность электрическому сигналу, сформированному ультразвуковым преобразователем 608, обходить множество конденсаторов через отдельный провод, управляемый посредством переключателя.
[0115] В некоторых вариантах осуществления, чтобы предоставлять возможность имплантируемому устройству 604 питаться энергией с помощью ультразвуковых волн, схема 630 питания может включать в себя схему 632 восстановления мощности, электрически соединенную со схемой 638 регулирования. В некоторых вариантах осуществления, схема 632 восстановления мощности может быть сконфигурирована, чтобы принимать и обрабатывать электрический сигнал, сформированный схемой 606 ультразвукового преобразователя. В некоторых вариантах осуществления, схема 632 восстановления мощности может включать в себя выпрямляющую схему (например, активный выпрямитель), чтобы преобразовывать электрический сигнал в AC-форме в DC-форму, когда преобразованный электрический сигнал может быть ассоциирован с первым напряжением (т.е. питающим напряжением принимаемых ультразвуковых волн).
[0116] В некоторых вариантах осуществления, вследствие опасностей для здоровья в распространяющихся высокомощных волнах через биологическую ткань субъекта, нормативные акты могут ограничивать величину мощности (например, 720 мВт/см2), предоставляемую ультразвуковыми волнами, передаваемыми опрашивающим устройством 602. Следовательно, первое напряжение, полученное из принимаемых ультразвуковых волн, может не быть достаточно высоким, чтобы задействовать электронные компоненты имплантируемого устройства 104. Например, транзисторы, используемые в технологии комплементарного металл-оксидного полупроводника (CMOS), могут требовать минимум примерно 2 В для работы транзисторов.
[0117] В некоторых вариантах осуществления, чтобы предоставлять более высокое первое напряжение для работы электронных компонентов имплантируемого устройства 604, питающие ультразвуковые волны могут передаваться как сигнал с широтно-импульсной модуляцией (PWM). В некоторых вариантах осуществления, посредством передачи питающих ультразвуковых волн в качестве PWM-сигнала, опрашивающее устройство 602 может быть сконфигурировано предоставлять короткие импульсы высокой интенсивности, так что средняя интенсивность остается в пределах регулирования, и предоставлять более высокую мгновенную мощность, чтобы формировать более высокое первое напряжение. В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано регулировать мгновенную интенсивность и/или ширину импульса (например, настройки ультразвуковой волны) PWM-сигнала, чтобы регулировать мощность, предоставляемую посредством питающих ультразвуковых волн.
[0118] В некоторых вариантах осуществления, чтобы предоставлять возможность питания имплантируемого устройства 604 посредством этих ультразвуковых волн, схема 634 конвейера мощности может включать в себя генератор подкачки заряда, сконфигурированный, чтобы преобразовывать первое напряжение во второе напряжение, большее по сравнению с первым напряжением. В некоторых вариантах осуществления, генератор подкачки заряда может включать в себя множество соединенных конденсаторов, управляемых посредством одного или более переключателей, чтобы формировать второе напряжение. В некоторых вариантах осуществления, генератор подкачки заряда может достигать коэффициентов передачи преобразователя, равных, по меньшей мере, 1х, 2х, 3х или 4х. В некоторых вариантах осуществления, величина второго напряжения может регулироваться на основе частоты переключения одного или более переключателей.
[0119] Как обсуждалось выше, мощность, предоставляемая посредством принимаемых ультразвуковых волн, может быть несогласующейся вследствие массы факторов, включающих в себя, например, глубину имплантации имплантируемого устройства 604 или мешающий биологический материал между ультразвуковым преобразователем 608 и источником ультразвуковой волны, например, опрашивающим устройством 602. Соответственно, в некоторых вариантах осуществления, чтобы предоставлять более согласующуюся мощность имплантируемому устройству 604, схема 632 восстановления мощности может включать в себя устройство 636 сохранения энергии, соединенное со схемой 634 конвейера мощности. В некоторых вариантах осуществления, устройство сохранения энергии включает в себя аккумулятор или накопительный конденсатор. В некоторых вариантах осуществления, чтобы сохранять небольшой форм-фактор имплантируемого устройства 604, устройство сохранения энергии может быть сконфигурировано как накопительный конденсатор.
[0120] В некоторых вариантах осуществления, накопительный конденсатор может иметь емкость, которая равна, по меньшей мере, 0,1 мкФ, по меньшей мере, 0,25 мкФ, по меньшей мере, 0,5 мкФ, по меньшей мере, 1 мкФ, по меньшей мере, 2 мкФ, по меньшей мере, 4 мкФ или, по меньшей мере, 8 мкФ. В некоторых вариантах осуществления, накопительный конденсатор может иметь емкость, которая меньше 10 мкФ, меньше 8 мкФ, меньше 4 мкФ, меньше 2 мкФ, меньше 1 мкФ, меньше 0,5 мкФ или меньше 0,25 мкФ. Например, накопительный конденсатор может иметь емкость в диапазоне 0,1-10 мкФ, таком как диапазон 0,5-2 мкФ. В некоторых вариантах осуществления, накопительный конденсатор может иметь емкость, которая равна примерно 1 мкФ.
[0121] В некоторых вариантах осуществления, устройство 636 сохранения энергии может быть сконфигурировано, чтобы работать, по меньшей мере, в двух режимах питания, чтобы предоставлять возможность имплантируемому устройству 604 более эффективно использовать мощность принимаемых ультразвуковых волн и предоставлять более согласующуюся мощность. В некоторых вариантах осуществления, режимы питания включают в себя режим заряда, в котором доля мощности принимаемых ультразвуковых волн может быть передана фрагменту 636 сохранения энергии, приспособленному для сохранения энергии. В некоторых вариантах осуществления, схема 634 конвейера мощности может быть сконфигурирована, чтобы заряжать устройство 636 сохранения энергии на основе сформированного первого напряжения. В некоторых вариантах осуществления, режимы питания включают в себя режим разряда, в котором доля энергии, сохраненной в устройстве 636 сохранения энергии, разряжается, чтобы передавать мощность от устройства 636 сохранения энергии, чтобы предоставлять дополнительную мощность другим компонентам устройства (например, схеме 614 стимуляции, схеме 616 обнаружения или схеме 620 контроллера, и т.д.) имплантируемого устройства 604. В некоторых вариантах осуществления, поток мощности к и от устройства 636 сохранения энергии может быть направлен через схему 634 конвейера мощности.
[0122] В некоторых вариантах осуществления, схема 638 регулирования может быть сконфигурирована, чтобы регулировать выходное напряжение (например, второе напряжение), формируемое схемой 634 конвейера мощности, чтобы предоставлять отрегулированные напряжения одной или более нагрузкам схемы имплантируемого устройства 604. В некоторых вариантах осуществления, когда схема 634 конвейера мощности включает в себя генератор подкачки заряда, схема 638 регулирования может быть сконфигурирована, чтобы удалять или уменьшать потенциальные пульсации напряжения, вызванные срабатывающими переключателями генератора подкачки заряда. В некоторых вариантах осуществления, схема 638 регулирования включает в себя регулятор DC-напряжения (например, регулятор с малым падением напряжения (LDO), чтобы регулировать напряжение, подаваемое к нагрузкам цифровой схемы имплантируемого устройства 604. В некоторых вариантах осуществления, схема 638 регулирования включает в себя регулятор DC-напряжения (например, регулятор с малым падением напряжения (LDO), чтобы регулировать напряжение, подаваемое к нагрузкам цифровой схемы имплантируемого устройства 604. В некоторых вариантах осуществления, схема 638 регулирования включает в себя регулятор AC-напряжения (например, регулятор с малым падением напряжения (LDO), чтобы регулировать напряжение, подаваемое к нагрузкам аналоговой схемы имплантируемого устройства 604.
[0123] В некоторых вариантах осуществления, схема 612 модуляции и демодуляции может включать в себя схему демодуляции, сконфигурированную, чтобы демодулировать электрический сигнал, сформированной схемой 606 ультразвукового преобразователя, чтобы извлекать информацию, закодированную в принятых ультразвуковых волнах. В некоторых вариантах осуществления, схема демодуляции может передавать извлеченную информацию, включающую в себя инструкцию для схемы 620 контроллера, сконфигурированную, чтобы управлять тем, как имплантируемое устройство 604 работает, на основе инструкции.
[0124] В некоторых вариантах осуществления, чтобы предоставлять возможность имплантируемому устройству 604 беспроводным образом обмениваться информацией с опрашивающим устройством 602, схема 612 модуляции и демодуляции может включать в себя схему модуляции, сконфигурированную, чтобы кодировать информацию с помощью ультразвукового обратно рассеянного излучения. Эта информация формируется имплантируемым устройством 604 и, для легкости объяснения, иногда называется информацией устройства в последующих описаниях.
[0125] В общем, когда имплантируемое устройство 604 внедрено в субъекте, ультразвуковые волны (включающие в себя несущие волны), излучаемые ультразвуковым приемопередатчиком опрашивающего устройства 602, будут проходить через биологическую ткань, прежде чем принимаются схемой 606 ультразвукового преобразователя имплантируемого устройства 604. Как описано выше, несущие волны вызывают механические вибрации на ультразвуковом преобразователе 608 (например, объемном пьезоэлектрическом преобразователе), чтобы формировать напряжение на концах ультразвукового преобразователя 608, которое затем обеспечивает протекание электрического тока к остальной части имплантируемого устройства 604. В некоторых вариантах осуществления, электрический ток, протекающий через ультразвуковой преобразователь 608, вынуждает схему 606 ультразвукового преобразователя излучать обратно рассеянные ультразвуковые волны, соответствующие принимаемым ультразвуковым волнам.
[0126] В некоторых вариантах осуществления, схема 612 модуляции может быть сконфигурирована, чтобы модулировать электрический ток, протекающий через ультразвуковой преобразователь 608, чтобы кодировать информацию устройства, который вынуждает результирующие ультразвуковые обратно рассеянные волны также кодировать информацию устройства. Соответственно, ультразвуковое обратно рассеянное излучение, испускаемое от имплантируемого устройства 604, может кодировать информацию устройства, связанную с имплантируемым устройством 604. В некоторых вариантах осуществления, схема модуляции может включать в себя один или более переключателей, таких как двухпозиционный переключатель или полевой транзистор (FET). Примерный FET, который может быть использован с некоторыми вариантами осуществления имплантируемого устройства 604, включает в себя полевой транзистор со структурой металл-оксид-полупроводник (MOSFET). В некоторых вариантах осуществления, схема модуляции может быть сконфигурирована, чтобы изменять импеданс электрического тока, протекающего через ультразвуковой преобразователь 608, и изменение в протекающем электрическом токе кодирует информацию.
[0127] Как описано выше, ультразвуковая мощность, предоставляемая опрашивающим устройством 602, может увеличиваться лишь настолько и должна быть ниже пороговых значений, считающихся безопасными регулирующими органами. Однако, вследствие неточного совмещения между ультразвуковым преобразователем 608 и УЗ-лучом, излучаемым опрашивающим устройством 602, мощность, подаваемая опрашивающим устройством 602, может не приниматься эффективно и ультразвуковым преобразователем 608. В некоторых вариантах осуществления, имплантируемое устройство 604 может использовать ультразвуковую связь посредством внедрения сигналов импланта или информации в ультразвуковое обратно рассеянное излучение, чтобы предоставлять возможность опрашивающему устройству 602 лучше отслеживать имплантируемое устройство 604. Например, как описано выше относительно фиг. 5, ультразвуковое обратно рассеянное излучение может быть принято опрашивающим устройством 602 и расшифровано для извлечения информации устройства, закодированной в ультразвуковом обратно рассеянном излучении. Затем, опрашивающее устройство 602 может сравнивать извлеченную информацию с предварительно определенным шаблоном, ассоциированным с имплантируемым устройством 604, и/или определять силу сигнала из извлеченной информации, чтобы изменять фокус луча для испускаемого УЗ-луча, чтобы увеличивать совмещение с ультразвуковым преобразователем 608 имплантируемого устройства 604, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, ультразвуковое обратно рассеянное излучение может быть принято опрашивающим устройством, которое может быть таким же или отличным от опрашивающего устройств 602, которое передало ультразвуковые волны, принятые ультразвуковым преобразователем 608.
[0128] В некоторых вариантах осуществления, схема 616 обнаружения может быть сконфигурирована, чтобы взаимодействовать с одним или более датчиками 640A-C, чтобы измерять или обнаруживать одно или более физиологических состояний субъекта. В некоторых вариантах осуществления, схема 616 обнаружения может включать в себя задающее устройство, сконфигурированное, чтобы предоставлять ток одному или более датчикам 640A-C и принимать сформированные сигналы от одного или более датчиков 640A-C. В некоторых вариантах осуществления, принятый сигнал может включать в себя информацию, представляющую обнаруженное физиологическое состояние или представляющее измеренное физиологическое состояние. В некоторых вариантах осуществления, схема 616 обнаружения может быть сконфигурирована, чтобы передавать информацию схеме 620 контроллера.
[0129] В некоторых вариантах осуществления, один или более датчиков 640A-C могут быть расположены внутри имплантируемого устройства 604 или присоединены к внешней стороне имплантируемого устройства 604. В некоторых вариантах осуществления, имплантируемое устройство 604 включает в себя, по меньшей мере, два датчика 640A-C. В некоторых вариантах осуществления, одно или более физиологических состояний могут включать в себя температуру, pH, давление, сердечный ритм, перенапряжение, давление кислорода, наличие анализируемого вещества или количество анализируемого вещества. Например, анализируемое вещество может быть кислородом или глюкозой.
[0130] В некоторых вариантах осуществления, датчики 640A-C могут включать в себя оптический датчик. В некоторых вариантах осуществления, оптический датчик содержит источник света и оптический детектор. В некоторых вариантах осуществления, оптический датчик обнаруживает кровяное давление или пульс. В некоторых вариантах осуществления, оптический датчик содержит матрицу, содержащую флуорофор или люминесцентный зонд, и при этом интенсивность флуоресценции или время жизни флуоресценции флуорофора зависит от количества анализируемого вещества. В некоторых вариантах осуществления, оптический датчик конфигурируется, чтобы выполнять спектроскопию в ближней инфракрасной области. В некоторых вариантах осуществления, оптический датчик обнаруживает глюкозу.
[0131] В некоторых вариантах осуществления, датчики 640A-C могут включать в себя потенциометрический химический датчик или амперометрический химический датчик. В некоторых вариантах осуществления, датчик обнаруживает кислород, pH или глюкозу. В некоторых вариантах осуществления, датчики 640A-C могут включать в себя температурный датчик. В некоторых вариантах осуществления, температурный датчик является термистором, термопарой или пропорциональной абсолютной температуре (PTAT) схемой. В некоторых вариантах осуществления, датчики 640A-C могут включать в себя датчик давления. В некоторых вариантах осуществления, датчик давления является датчиком с микроэлектромеханической системой (MEMS). В некоторых вариантах осуществления, схема 616 обнаружения конфигурируется, чтобы измерять кровяное давление или пульс. В некоторых вариантах осуществления, датчики 640A-C могут включать в себя тензометрический датчик.
[0132] В некоторых вариантах осуществления, схема 616 обнаружения может быть сконфигурирована, чтобы взаимодействовать, например, с датчиком 640C, чтобы обнаруживать электрофизиологический сигнал от нерва или целевого подмножества нервных волокон в нерве, как будет дополнительно объяснено ниже относительно фиг. 14. В некоторых вариантах осуществления, датчик 6140C может включать в себя электродные площадки, которые могут быть такими же или отличными от электродных площадок 642, задействуемых схемой 614 стимуляции. В некоторых вариантах осуществления, схема 616 обнаружения может быть сконфигурирована, чтобы записывать нейронную активность нерва или целевого подмножества нервных волокон на основе обнаруженного электрофизиологического сигнала.
[0133] В некоторых вариантах осуществления, один или более методов, таких как вычислительное моделирование (например, модели конечных элементов), обратная оценка источника, многополюсная (например, трехполюсная) нейронная запись, запись с выборочной скоростью или формирование луча, могут быть реализованы схемой 116 обнаружения (отдельно или совместно со схемой 120 контроллера), чтобы выборочно нацеливаться на подмножество нервных волокон. См., например, Тейлор и др., Multiple-electrode nerve cuffs for low-velocity and velocity selective neural recording, Medical & Biological Engineering & Computing, том 42, сс. 634- 643 (2004); и Уодлингер и др., Localization and Recovery of Peripheral Neural Sources with Beamforming Algorithms, IEEE Transactions on Neural Systems and Rehabilitation Engineering, том 17, № 5, сс. 461-468 (2009).
[0134] В некоторых вариантах осуществления, схема 616 обнаружения может быть сконфигурирована, чтобы задействовать множество электродов датчика 640C для целевого обнаружения электрофизиологического сигнала. Например, датчик 640C может быть изогнутым элементом, который протягивается от имплантируемого устройства 604, как дополнительно описывается ниже относительно фиг. 14. В некоторых вариантах осуществления, схема 616 обнаружения может анализировать электрофизиологический сигнал, обнаруживаемый посредством всех или подмножества электродных площадок, чтобы определять подмножество нервных волокон в нерве, которые передают электрофизиологический сигнал. Некоторые нервы могут передавать суммарный электрофизиологический сигнал (или сложные потенциалы действия), который является суммой электрофизиологических сигналов (или потенциалов действия), одновременно передаваемых двумя или более различными подмножествами нервных волокон. На основе электрофизиологического сигнала, обнаруживаемого посредством множества электродных площадок, схема 616 обнаружения может быть приспособлена определять, какое подмножество нервных волокон как электрофизиологический сигнал передает. В некоторых вариантах осуществления, данные, принимаемые от опрашивающего устройства 602 (такие как данные о температуре или данные, относящиеся к концентрации анализируемого вещества или другому физиологическому состоянию), дополнительно используются для определения того, какое подмножество нервных волокон передает электрофизиологический сигнал.
[0135] Например, в некоторых вариантах осуществления, схема 616 обнаружения может быть сконфигурирована, чтобы выборочно обнаруживать электрофизиологический сигнал от целевого подмножества нервных волокон с помощью записи с выборочной скоростью, которая может сочетаться с многополярной (например, трехполярной) записью (которая может включать в себя любое число трехполюсников с множеством электродов на одном или более изогнутых элементах).
[0136] Формирование луча может дополнительно или альтернативно быть использовано для обнаружения электрофизиологических сигналов от целевого подмножества нервных волокон. Фрагмент или все электродные площадки одного или более изогнутых элементов могут обнаруживать электрофизиологический сигнал от нерва, и схема 616 обнаружения может определять местоположение в поперечном сечении передаваемого сигнала в нерве на основе различий в электрофизиологическом сигнале, обнаруживаемом частью или всеми электродными площадками одного или более изогнутых элементов.
[0137] В некоторых вариантах осуществления, стимуляция одного или более нервов в местоположении, отдельном от местоположения имплантируемого устройства 604, может приводить в результате к модуляции электрофизиологического сигнала в местоположении имплантируемого устройства 604. Модуляция электрофизиологического сигнала, обнаруживаемого в различных подмножествах нервных волокон в нерве в электрическом соединении с электродными площадками (например, электродными площадками 642) имплантируемого устройства 604, может быть результатом стимуляции в различных отдаленных нервах. Например, стимуляция селезеночного нерва может приводить в результате к модуляции электрофизиологического сигнала, обнаруживаемого от первого подмножества нервных волокон в черепном нерве, а стимуляция почечного нерва может приводить в результате к модуляции электрофизиологического сигнала, обнаруживаемого от второго подмножества нервных волокон в черепном нерве. Следовательно, имплантируемое устройство, размещенное на черепном нерве, может обнаруживать электрофизиологический сигнал от первого подмножества нервных волокон, чтобы наблюдать за стимуляцией селезеночного нерва, и второго подмножества нервных волокон, чтобы наблюдать за стимуляцией почечного нерва.
[0138] В некоторых вариантах осуществления, схема 614 стимуляции может быть сконфигурирована, чтобы излучать нацеленный электрический импульс на подмножество нервных волокон в нерве, выборочно активизируя одну или более электродных площадок 642, соединенных с подмножеством нервных волокон. В некоторых вариантах осуществления, имплантируемое устройство 604 может включать в себя один или более изогнутых элементов, которые электрически соединяют схему 614 стимуляции с электродными площадками 642, как будет дополнительно описано ниже относительно фиг. 14.
[0139] В некоторых вариантах осуществления, схема 614 стимуляции может управляться схемой 620 контроллера, чтобы задействовать электродные площадки 642 или выборочно активизировать электродные площадки 642. Выборочная активизация может включать в себя, например, активизацию части электродных площадок во множестве электродных площадок 642 одного или более изогнутых элементов и/или дифференциальную активизацию всех или части электродных площадок во множестве электродных площадок 642 одного или более изогнутых элементов. Множество электродов может, следовательно, быть задействовано для управления электрическим импульсом, излучаемым множеством электродных площадок 642 на целевое подмножество нервных волокон. Такие методы как интерференция электрического поля или многополярная стимуляция (например, трехполюсная стимуляция) могут быть использованы для нацеливания электрического импульса на подмножество нервных волокон в нерве, согласно некоторым вариантам осуществления. См., например, Гроссман и др., Noninvasive Deep Brain Stimulation via Temporally Interfering Electrical Fields, Cell, том 169, сс. 1029-1041 (2017). Электродные площадки 142 в одном или более изогнутых элементах могут быть выборочно активизированы схемой 120 контроллера, чтобы нацеливать излучаемый электрический импульс на подмножество нервных волокон.
[0140] Подмножество нервных волокон, на которые нацелен испускаемый электрический импульс, может быть таким же или отличаться от подмножества нервных волокон, от которых электрофизиологический сигнал обнаруживается посредством схемы 616 обнаружения. Один или более изогнутых элементов, сконфигурированных, чтобы испускать нацепленный электрический импульс, могут быть такими же или отличаться от одного или более изогнутых элементов на имплантируемом устройстве 604, сконфигурированных, чтобы обнаруживать электрофизиологический сигнал. Испускаемый нацеленный электрический импульс может стимулировать нерв в позиции имплантируемого устройства 604. Подмножество нервных волокон, на которые нацелен электрический импульс, может быть тем же или отличным от подмножества нервных волокон, для которых электрофизиологический сигнал выборочно обнаруживается.
[0141] Подмножество нервных волокон, на которые нацелен электрический импульс, испускаемый имплантируемым устройством 604, может быть, например, одним или более (например, 2, 3, 4 или более) пучками, или частью из одного или более (например, 2, 3, 4 или более) пучков в нерве. В некоторых вариантах осуществления, подмножество нервных волокон содержит или состоит из афферентных нервных волокон в нерве, или подмножества афферентных нервных волокон в нерве. В некоторых вариантах осуществления, подмножество нервных волокон содержит или состоит из эфферентных нервных волокон в нерве, или подмножества эфферентных нервных волокон в нерве. В некоторых вариантах осуществления, подмножество нервных волокон содержит или состоит из эфферентных нервных волокон в двух или более пучках в нерве или афферентных нервных волокон в двух или более пучках в нерве.
[0142] Целевая стимуляция подмножества нервных волокон посредством испускания нацеленного электрического импульса на подмножество нервных волокон может приводить в результате к стимуляции нерва в местоположении, отдаленном от позиции нерва. Отдаленный нерв, стимулируемый посредством имплантируемого устройства 604, зависит от подмножества нервов в позиции имплантируемого устройства 604, на которое нацелен электрический импульс, испускаемый устройством. В некоторых вариантах осуществления, имплантируемое устройство 604 позиционируется в первом локусе нерва и конфигурируется, чтобы стимулировать второй локус нерва, испуская нацеленный электрический импульс на подмножество нервных волокон в первом локусе нерва, который ассоциируется со вторым локусом нерва. В некоторых вариантах осуществления, первый локус нерва и второй локус нерва отделяются одной или более точками нервной ветви или одним или более синапсами. В некоторых вариантах осуществления, второй локус нерва является ближним к мозгу относительно первого локуса нерва, а в некотором варианте осуществления второй локус нерва является отдаленным от мозга относительно первого локуса нерва. В некоторых вариантах осуществления, целевое подмножество нервных волокон содержит или состоит из афферентных нервных волокон. В некоторых вариантах осуществления, целевое подмножество нервных волокон содержит или состоит из эфферентных нервных волокон.
[0143] В некоторых вариантах осуществления, схема 620 контроллера включает в себя командный процессор 622, детектор 626 режима и память 650. В некоторых вариантах осуществления, память 650 включает в себя память долговременного хранения, такую как регистровая память, кэш процессора, оперативное запоминающее устройство (RAM). В некоторых вариантах осуществления, схема 620 контроллера может быть цифровой схемой, аналоговой схемой или смешанной сигнальной интегральной схемой. Примеры схемы 120 контроллера могут включать в себя микропроцессор, конечный автомат (FSM), программируемую пользователем вентильную матрицу (FPGA) и микроконтроллер.
[0144] В некоторых вариантах осуществления, детектор 626 режима может быть сконфигурирован, чтобы определять команду рабочего режима из ультразвуковых волн, принимаемых ультразвуковым преобразователем 608. В некоторых вариантах осуществления, детектор 626 режима может определять команду рабочего режима при определении соответствия шаблону из множества предварительно определенных шаблонов 656, сохраненных в памяти 650. Например, шаблон может быть последовательностью из одного или более импульсов, имеющих характерные свойства ультразвуковой волны, такие как продолжительность ультразвукового импульса. В этом примере, детектор 626 режима может сопоставлять фрагмент команды рабочего режима с одним или более предварительно определенными шаблонами 656, чтобы определять совпадающий шаблон. В другом примере, шаблон может соответствовать свойству ультразвука, такому как продолжительность импульса, амплитуда или изменение фазы или частоты. В этом примере, детектор 626 режима может анализировать свойство ультразвука (например, продолжительность импульса) для фрагмента, чтобы определять соответствие шаблону. В некоторых вариантах осуществления, фрагмент команды рабочего режима может быть одиночным импульсом, который указывает начало команды рабочего режима. В других вариантах осуществления, фрагмент может быть последовательностью ультразвуковых импульсов.
[0145] В некоторых вариантах осуществления, детектор 626 режима может принимать ультразвуковые волны в качестве электрического сигнала, который был сформирован (например, демодулирован) посредством схемы 612 модуляции и демодуляции на основе ультразвуковых волн, принимаемых в схеме 606 ультразвукового преобразователя. В некоторых вариантах осуществления, детектор 626 режима может включать в себя одну или более схем обнаружения, сконфигурированных, чтобы обнаруживать одно или более свойств ультразвуковой волны из электрического сигнала. В некоторых вариантах осуществления, одна из этих схем обнаружения может включать в себя схему перехода через ноль, сконфигурированную, чтобы определять продолжительность импульса для каждого ультразвукового импульса в команде рабочего режима. Например, схема перехода через ноль может быть сконфигурирована, чтобы подсчитывать и сохранять число случаев, когда первый фрагмент электрического сигнала пересекает предварительно определенный уровень напряжения в предварительно определенном числе тактовых циклов, чтобы определять продолжительность импульса. В некоторых вариантах осуществления, предварительно определенный уровень напряжения является напряжением, близким к 0 В (например, менее 10 мВ, менее 50 мВ, менее 100 мВ или менее 200 мВ).
[0146] В некоторых вариантах осуществления, командный процессор 622 может быть сконфигурирован, чтобы устанавливать рабочий режим имплантируемого устройства 604 в один рабочий режим из множества предварительно определенных рабочих режимов 652 на основе команды рабочего режима, определенной посредством детектора 626 режима. В некоторых вариантах осуществления, командный процессор 622 может сохранять принятую команду рабочего режима и ассоциированные инструкции в памяти 650, такой как регистр инструкций. В некоторых вариантах осуществления, командный процессор 622 может быть сконфигурирован, чтобы управлять имплантируемым устройством 604 для входа в рабочее состояние, соответствующее рабочему режиму на основе сохраненной команды рабочего режима. Например, командный процессор 622 может быть реализован как FSM или программа в микроконтроллере, которая управляет рабочими состояниями имплантируемого устройства 604 на основе текущего рабочего состояния и одного или более обнаруженных входных данных, таких как одна или более принятых команд рабочего режима, одно или более значений датчика или их сочетание.
[0147] В некоторых вариантах осуществления, командный процессор 622 может быть сконфигурирован, чтобы извлекать информацию из фрагмента команды рабочего режима, чтобы конфигурировать различные параметры или выбирать рабочий режим. Информация, закодированная в ультразвуковых волнах, излучаемых опрашивающим устройством и принимаемых имплантируемым устройством с замкнутым контуром, может включать в себя, например, инструкции для начала или прекращения нейромодуляции, одну или более инструкций калибровки, одно или более обновлений в операционном программном обеспечении и/или один или более шаблонов (таких как шаблонные электрофизиологические сигналы, один или более шаблонных электрофизиологических сигналов и/или один или более шаблонных сигналов стимуляции). В некоторых вариантах осуществления, командный процессор 622 может быть сконфигурирован, чтобы обрабатывать и сохранять принятые инструкции в памяти 650. В некоторых вариантах осуществления, командный процессор 622 может входить в рабочий режим из множества рабочих режимов на основе одной или более принятых команд рабочего режима. В некоторых вариантах осуществления, множество рабочих режимов может включать в себя, например, режим стимуляции нерва, режим записи нейронной активности или режим определения одного или более физиологических состояний. Например, если команда рабочего режима указывает, что имплантируемое устройство 604 должно входить в режим нейронной стимуляции, схема 620 контроллера может быть сконфигурирована, чтобы управлять схемой 614 стимуляции, чтобы стимулировать конкретные нервные волокна или фрагменты нерва.
[0148] В некоторых вариантах осуществления, когда командный процессор 622 управляет имплантируемым устройством 104, чтобы входить в режим записи нейронной активности или режим определения одного или более физиологических состояний, командный процессор 622 может управлять схемой 616 обнаружения, чтобы извлекать информацию устройства (например, нейронную запись или обнаруженное/измеренное физиологическое состояние). В некоторых вариантах осуществления, командный процессор 622 может быть сконфигурирован, чтобы извлекать команду 654, ассоциированную с текущим рабочим режимом 652, чтобы управлять операциями имплантируемого устройства 604. Например, в режиме записи нейронной активности, командный процессор 622 может принимать команду 654, соответствующую режиму записи нейронной активности, и выдавать команду 654 для управления схемой 616 обнаружения, чтобы дискретизировать нейронную активность (например, пример информации устройства) нерва. В некоторых вариантах осуществления, после извлечения информации устройства, командный процессор 622 может быть сконфигурирован, чтобы управлять схемой 612 модуляции и демодуляции на основе команды 654, чтобы кодировать информацию устройства в ультразвуковом обратно рассеянном излучении, как описано выше.
[0149] Фиг. 7 иллюстрирует способ 700 для обнаружения имплантируемого устройства с помощью ультразвуковых волн, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, имплантируемое устройство может быть примером имплантируемого устройства 120, как описано выше относительно фиг. 1. В некоторых вариантах осуществления, один или более этапов способа 700 могут быть выполнены опрашивающим устройством, таким как опрашивающее устройство 106 или 502, которое описано выше относительно фиг. 1 и 5, соответственно. Например, один или более этапов способа 700 могут быть выполнены модулем 517 отслеживания импланта. Для легкости объяснения, различные этапы ниже для способа 700 могут ссылаться на компоненты опрашивающего устройства 502. В некоторых вариантах осуществления, способ 700 может быть выполнен посредством системы, включающей в себя опрашивающее устройство на связи с одним или более вычислительными устройствами. Например, некоторые из интенсивных в вычислительном отношении этапов могут быть выгружены из опрашивающего устройства в одно или более вычислительных устройств, чтобы увеличивать скорость вычислений и эффективность.
[0150] На этапе 702, опрашивающее устройство излучает ультразвуковой (УЗ) пучок (луч), чтобы последовательно фокусироваться на множестве фокусных точек. Например, модуль отслеживания импланта (например, модуль 517 отслеживания импланта) опрашивающего устройства может управлять тем, как УЗ-луч излучается, через генератор команд (например, генератор 514 команд). В некоторых вариантах осуществления, опрашивающее устройство включает в себя массив преобразователей, включающий в себя множество преобразователей, которые могут управляться опрашивающим устройством через электронное формирование луча, чтобы фокусировать УЗ-луч в конкретной фокусной точке. Например, генератор команд может формировать инструкции для управления массивом преобразователей, как описано выше относительно фиг. 5. В некоторых вариантах осуществления, множество фокусных точек представляют регулируемый диапазон для УЗ-луча. В некоторых вариантах осуществления, регулируемый диапазон может включать в себя линейный диапазон. В других вариантах осуществления, в которых массив преобразователей может включать в себя 2D-массив преобразователей, регулируемый диапазон может включать в себя 2D-область.
[0151] На этапе 704, в каждой фокусной точке из множества фокусных точек, опрашивающее устройство определяет, насколько вероятно имплантируемое устройство располагается в фокусной точке. В некоторых вариантах осуществления, опрашивающее устройство может выполнять этапы 704A-C в каждой фокусной точке из множества фокусных точек.
[0152] На этапе 704A, опрашивающее устройство удерживает сфокусированный УЗ-луч в фокусной точке в течение интервала времени, который позволяет имплантируемому устройству, если располагается в фокусной точке, преобразовывать энергию из ультразвуковых волн УЗ-луча в электрическую энергию, чтобы входить во включенное состояние из выключенного состояния. В некоторых вариантах осуществления, продолжительность может быть предварительно определенным периодом времени, который предварительно определяется на основе различных факторов, включающих в себя одно или более из силы УЗ-луча, требования по мощности для имплантируемого устройства, емкости для сохранения энергии имплантируемого устройства или среднего или оцененного максимального расстояния между опрашивающим устройством и имплантируемым устройством.
[0153] На этапе 704B опрашивающее устройство принимает обратно рассеянные ультразвуковые волны, соответствующие УЗ-лучу, сфокусированному на фокусной точке. В некоторых вариантах осуществления, опрашивающее устройство может задействовать переключатель для переключения между передачей УЗ-луча и приемом ультразвукового обратно рассеянного излучения. В некоторых вариантах осуществления, имплантируемое устройство, принимающее ультразвуковые волны УЗ-луча, может быть сконфигурировано, чтобы кодировать информацию в ультразвуковом обратно рассеянном излучении, испускаемом имплантируемым устройством. Например, имплантируемое устройство может модулировать электрический сигнал, цифровым образом управляя переключателем, чтобы шунтировать ультразвуковой преобразователь для кодирования информации. В некоторых вариантах осуществления, информация может включать в себя предварительно определенный шаблон, который идентифицирует имплантируемое устройство. В некоторых вариантах осуществления, предварительно определенный шаблон может быть прямоугольным колебанием, посредством которого имплантируемое устройство периодически закорачивает пьезоклеммы одного или более своих преобразователей на предварительно определенный период времени. В некоторых вариантах осуществления, предварительно определенный шаблон может быть последовательностью цифровых данных, декодированных опрашивающим устройством, как описано выше относительно обработки 312 цифровых данных на фиг. 3.
[0154] На этапе 704C, опрашивающее устройство сравнивает принятые обратно рассеянные ультразвуковые волны с предварительно определенным шаблоном, ассоциированным с имплантируемым устройством, которое должно быть обнаружено, чтобы формировать оценку, указывающую, насколько вероятно обратно рассеянные ультразвуковые волны содержат предварительно определенный шаблон. Например, модуль отслеживания импланта может хранить предварительно определенный шаблон в памяти и сравнивать предварительно определенный шаблон с обратно рассеянными ультразвуковыми волнами. В некоторых вариантах осуществления, модуль отслеживания импланта может хранить последовательность цифровых данных, соответствующих предварительно определенному шаблону, и декодировать обратно рассеянные ультразвуковые волны, чтобы определять, присутствует ли предварительно определенный шаблон в обратно рассеянных ультразвуковых волнах. В некоторых вариантах осуществления, оценка может указывать, обнаруживается или нет предварительно определенный шаблон имплантируемого устройства из ультразвукового обратно рассеянного излучения. В некоторых вариантах осуществления, опрашивающее устройство может связываться (например, посредством проводного соединения или беспроводного соединения) с одним или более вычислительными устройствами, чтобы формировать оценку.
[0155] На этапе 706, опрашивающее устройство определяет местоположение имплантируемого устройства из множества фокусных точек на основе множества оценок, сформированных для множества соответствующих фокусных точек. В некоторых вариантах осуществления, модуль отслеживания импланта опрашивающего устройства может оценивать местоположение имплантируемого устройства на основе того, какие фокусные точки из множества фокусных точек имеют оценки, которые являются, по меньшей мере, предварительно определенным пороговым значением или уровнем достоверности. Например, опрашивающее устройство может определять местоположение, вычисляя один или более показателей центральной тенденции, таких как медиана, наиболее вероятное значение или среднее значение для фокусных точек, чьи оценки находятся на или выше предварительно определенного порогового значения (например, 80%, 90%, 95% и т.д.). В некоторых вариантах осуществления, модуль отслеживания импланта может быть сконфигурирован, чтобы вычислять спектральный центроид (т.е. центр массы) для оценок по множеству фокусных точек. Другими словами, модуль отслеживания импланта может вычислять взвешенное среднее значение оценок по множеству фокусных точек, чтобы идентифицировать "среднее" значение фокусной точки, представляющее "центр массы" для множества фокусных точек относительно множества соответствующих оценок. В некоторых вариантах осуществления, опрашивающее устройство может выбирать фокусную точку из множества фокусных точек как соответствующую местоположению имплантируемого устройства.
[0156] В некоторых вариантах осуществления, после того как опрашивающее устройство определяет оцененное (расчетное) местоположение имплантируемого устройства, опрашивающее устройство может быть сконфигурировано направлять УЗ-луч на фокусную точку, ближайшую к оцененному местоположению, чтобы подтверждать, что имплантируемое устройство находится в этой фокусной точке. Например, опрашивающее устройство может фокусировать УЗ-луч на фокусной точке, выбранной из множества фокусных точек, в определении расчетного местоположения на этапе 706. В некоторых вариантах осуществления, опрашивающее устройство может анализировать ультразвуковое обратно рассеянное излучение, принимаемое, в то время как УЗ-луч фокусируется на выбранной фокусной точке, чтобы подтверждать, что имплантируемое устройство располагается в выбранной фокусной точке. Например, опрашивающее устройство может сравнивать силу сигнала, извлеченного из ультразвукового обратно рассеянного излучения, с предварительно определенным пороговым значением. В некоторых вариантах осуществления, опрашивающее устройство может сохранять УЗ-луч в выбранной фокусной точке в ответ на подтверждение того, что имплантируемое устройство находится в выбранной фокусной точке. Иначе, опрашивающее устройство может управлять УЗ-лучом, чтобы перефокусироваться на одной или более фокусных точках из второго множества фокусных точек в ответ на подтверждение того, что имплантируемое устройство не находится в выбранной фокусной точке, согласно некоторым вариантам осуществления. Например, одна или более фокусных точек могут быть выбраны из множества фокусных точек этапа 702.
[0157] В некоторых вариантах осуществления, после того как опрашивающее устройство обнаруживает имплантируемое устройство и определяет местоположение имплантируемого устройства, опрашивающее устройство может входить в режим отслеживания, в котором опрашивающее устройство определяет и поддерживает совмещение между УЗ-лучом и имплантируемым устройством, как будет дополнительно описано ниже относительно фиг. 8-11.
[0158] Фиг. 8 иллюстрирует схему 800, показывающую пример операционной логики опрашивающего устройства (например, опрашивающего устройства 106 на фиг. 1 или опрашивающего устройства 502 на фиг. 5), чтобы эффективно отслеживать и питать имплантируемое устройство с помощью ультразвуковых волн, согласно некоторым вариантам осуществления. Как обсуждалось выше, схема контроллера (например, схема 512 контроллера) опрашивающего устройства может быть сконфигурирована, чтобы реализовывать конечный автомат (FSM) для управления операциями опрашивающего устройства. Например, модуль отслеживания импланта (например, модуль 517 отслеживания импланта) опрашивающего устройства может реализовывать FSM. Например, схема 800 показывает конечный автомат Мура. Как показано в схеме 800, FSM может включать в себя множество рабочих состояний 802-806 для отслеживания имплантируемого устройства. В то время как FSM показан как являющийся автоматом Мура, опрашивающее устройство может быть сконфигурировано, чтобы управлять своей операционной логикой согласно другим типам FSM. Например, вместо автомата Мура, FSM может быть реализован как конечный автомат Мили, конечный автомат Харела или конечный автомат на унифицированном языке моделирования (UML).
[0159] В рабочем состоянии 802, опрашивающее устройство может быть сконфигурировано устанавливать состояние синхронизации с имплантируемым устройством. В некоторых вариантах осуществления, опрашивающее устройство управляет своим УЗ-лучом, чтобы фокусироваться на множестве фокусных точек, чтобы определять фокусную точку, в которой сила сигнала, определенная из принятого ультразвукового обратно рассеянного излучения, выше предварительно определенного порогового значения синхронизации. Как показано, если определенная сила сигнала ниже предварительно определенного порогового значения, опрашивающее устройство остается в рабочем состоянии 802. После того как сила сигнала удовлетворяет или превышает предварительно определенное пороговое значение, опрашивающее устройство входит в рабочее состояние 804.
[0160] В рабочем состоянии 804, опрашивающее устройство может быть сконфигурировано, чтобы отслеживать местоположение имплантируемого устройства. В некоторых вариантах осуществления, опрашивающее устройство регулирует то, куда УЗ-луч фокусируется, чтобы максимизировать силу сигнала для сигнала, извлеченного из принятого ультразвукового обратно рассеянного излучения. В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано, чтобы оставаться в рабочем состоянии 804 и регулировать позицию фокусной точки, пока сила соответствующего сигнала больше не будет увеличиваться, т.е. локальный максимум был найден. После того как сила сигнала была максимизирована, опрашивающее устройство входит в рабочее состояние 806.
[0161] В рабочем состоянии 806, опрашивающее устройство поддерживает УЗ-луч фокусирующимся на фокусной точке, которая получилась в результате максимальной силы сигнала в рабочем состоянии 804. В некоторых вариантах осуществления, эта максимальная сила сигнала может представлять пороговое значение установившегося состояния. Чтобы обеспечивать согласованное питание и надежную ультразвуковую связь между опрашивающим устройством и имплантируемым устройством, опрашивающее устройство конфигурируется, чтобы наблюдать за силой сигнала для сигнала, принятого в ультразвуковом обратно рассеянном излучении. Если наблюдаемая сила сигнала определяется как находящаяся в предварительно определенном диапазоне порогового значения установившегося состояния, тогда опрашивающее устройство сохраняет фокус УЗ-луча. Иначе, если наблюдаемая сила сигнала выпадает за пределы диапазона порогового значения установившегося состояния, опрашивающее устройство повторно входит в рабочее состояние 804, чтобы отслеживать местоположение имплантируемого устройства.
[0162] Фиг. 9 иллюстрирует способ 900 для отслеживания имплантируемого устройства, питаемого с помощью ультразвуковых волн, чтобы поддерживать мощность, подаваемую к имплантируемому устройству, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, имплантируемое устройство может быть примером имплантируемого устройства 120, как описано выше относительно фиг. 1. В некоторых вариантах осуществления, один или более этапов способа 900 могут быть выполнены опрашивающим устройством, таким как опрашивающее устройство 106 или 502, которое описано выше относительно фиг. 1 и 5, соответственно. Например, один или более этапов способа 900 могут быть выполнены модулем 517 отслеживания импланта имплантируемого устройства 502, который описан выше относительно фиг. 5. В некоторых вариантах осуществления, способ 900 может быть выполнен посредством отслеживающей системы, включающей в себя опрашивающее устройство на связи с одним или более вычислительными устройствами. Например, некоторые из интенсивных в вычислительном отношении этапов могут быть выгружены из опрашивающего устройства в одно или более вычислительных устройств, чтобы увеличивать скорость вычислений и эффективность. Для легкости объяснения, различные этапы ниже для способа 900 могут ссылаться на компоненты опрашивающего устройства 502.
[0163] На этапе 902, опрашивающее устройство устанавливает состояние синхронизации с имплантируемым устройством. В некоторых вариантах осуществления, этап 902 включает в себя этапы 904-908.
[0164] На этапе 904, опрашивающее устройство излучает ультразвуковой (УЗ) луч в первую фокусную точку и принимает первое ультразвуковое обратно рассеянное излучение, соответствующее излучаемому УЗ-лучу. Как описано выше, когда ультразвуковые волны УЗ-луча контактируют с имплантируемым устройством, ультразвуковые волны рассеиваются, и часть их энергии излучается во всех пространственных направлениях, включающих в себя обратно в направлении опрашивающего устройства. В некоторых вариантах осуществления, имплантируемое устройство может быть сконфигурировано, чтобы модулировать электрический сигнал для кодирования информации в ультразвуковом обратно рассеянном излучении.
[0165] На этапе 906, опрашивающее устройство определяет первую силу сигнала на основе первого ультразвукового обратно рассеянного излучения. В некоторых вариантах осуществления, модуль отслеживания импланта опрашивающего устройства может быть сконфигурирован, чтобы извлекать сигнал импланта из ультразвукового обратно рассеянного излучения и определять его силу сигнала. Как описано выше относительно фиг. 3, сигнал импланта может соответствовать модуляции сигнала, выполненной имплантируемым устройством для кодирования данных импланта.
[0166] В некоторых вариантах осуществления, модуль отслеживания импланта может подавлять помехи сигнала или окружающий шум от принимаемых обратно рассеянных ультразвуковых волн, чтобы извлекать сигнал импланта. В некоторых вариантах осуществления, модуль отслеживания импланта может выполнять подавление помех посредством сравнения первого фрагмента ультразвукового обратно рассеянного излучения, который включает в себя сигнал импланта, со вторым фрагментом ультразвуковым обратно рассеянным излучением, который не включает в себя сигнал импланта, чтобы извлекать сигнал импланта. Например, сигнал импланта может вычитать второй фрагмент (соответствующий пассивному обратно рассеянному излучению без модуляции импланта) из первого фрагмента (соответствующего активному обратно рассеянному излучению с модуляцией импланта), чтобы подавлять окружающий шум или помехи.
[0167] В некоторых вариантах осуществления, модуль отслеживания импланта может быть сконфигурирован, чтобы определять силу сигнала из сигнала импланта, извлеченного из ультразвукового обратно рассеянного излучения. В некоторых вариантах осуществления, модуль отслеживания импланта может определять силу сигнала, определяя глубину модуляции или изменение амплитуды извлеченного сигнала. Например, модуль отслеживания импланта может определять изменение амплитуды как процент изменения амплитуды.
[0168] На этапе 908, опрашивающее устройство устанавливает состояние синхронизации с имплантируемым устройством в ответ на определение того, что первая сила сигнала удовлетворяет предварительно определенному пороговому значению. Например, предварительно определенное пороговое значение может быть минимальным пороговым значением амплитуды.
[0169] На этапе 910, после того как состояние синхронизации устанавливается, опрашивающее устройство отслеживает имплантируемое устройство посредством регулировки того, куда УЗ-луч фокусируется. Другими словами, опрашивающее устройство отслеживает местоположение имплантируемого устройства, так что фокусная точка УЗ-луча находится в совмещении с местоположением имплантируемого устройства. В некоторых вариантах осуществления, отслеживание имплантируемого устройства является критичным, чтобы поддерживать достаточную мощность, предоставляемую УЗ-лучом имплантируемому устройству, и добиваться надежной двухсторонней ультразвуковой связи между опрашивающим устройством и имплантируемым устройством. Посредством отслеживания имплантируемого устройства опрашивающее устройство может быть сконфигурировано работать согласно нормативным рекомендациям для максимальной допустимой мощности, направленной на устройства внутри тела. В некоторых вариантах осуществления, этап 910 включает в себя этапы 912-918.
[0170] На этапе 912, опрашивающее устройство рассчитывает местоположение имплантируемого устройства. В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано оценивать местоположение на основе первого ультразвукового обратно рассеянного излучения. В некоторых вариантах осуществления, опрашивающее устройство определяет направление, в котором необходимо регулировать позицию первой фокусной точки, на основе формирования луча для приема. В некоторых вариантах осуществления, опрашивающее устройство может определять расчетное местоположение на основе одного или более предварительно определенных фрагментов первого ультразвукового обратно рассеянного излучения. В некоторых вариантах осуществления, опрашивающее устройство может определять расчетное местоположение на основе одного или более ультразвуковых обратно рассеянных излучений, принимаемых после первого ультразвукового обратно рассеянного излучения.
[0171] На этапе 914, опрашивающее устройство излучает УЗ-луч во вторую фокусную точку ближе к оцененному местоположению по сравнению с первой фокусной точкой и принимает второе ультразвуковое обратно рассеянное излучение, соответствующее излученному УЗ-лучу.
[0172] На этапе 916, опрашивающее устройство определяет вторую силу сигнала на основе второго ультразвукового обратно рассеянного излучения, принятого на этапе 914. Например, аналогично тому, как первая сила сигнала может быть определена из первого ультразвукового обратно рассеянного излучения на этапе 906, модуль отслеживания импланта опрашивающего устройства может извлекать второй сигнал импланта из второго ультразвукового обратно рассеянного излучения и определять вторую силу сигнала из второго извлеченного сигнала импланта.
[0173] На этапе 918, опрашивающее устройство определяет, сохранять или регулировать место, куда излучаемый УЗ-луч фокусируется, на основе сравнения второй силы сигнала с ранее определенной силой сигнала, чтобы отслеживать имплантируемое устройство. В некоторых вариантах осуществления, опрашивающее устройство может сравнивать вторую силу сигнала с ранее определенной первой силой сигнала, чтобы определять, сохранять или регулировать фокус УЗ-луча. Например, если вторая сила сигнала больше первой силы сигнала, опрашивающее устройство может регулировать фокусную точку в направлении второй фокусной точки. В другом примере, если вторая сила сигнала меньше ранее определенной силы сигнала, тогда опрашивающее устройство может сохранять фокус в первой фокусной точке, чтобы поддерживать приемлемый уровень синхронизации или совмещения между УЗ-лучом и имплантируемым устройством.
[0174] Фиг. 10 иллюстрирует способ 1000 для отслеживания имплантируемого устройства, питаемого с помощью ультразвуковых волн, чтобы эффективно поддерживать мощность, подаваемую к имплантируемому устройству, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, способ 1000 иллюстрирует дополнительные детали, которые распространяются на этап 910, который описан выше относительно фиг. 9. В некоторых вариантах осуществления, один или более этапов способа 1000 могут быть выполнены модулем отслеживания импланта (например, модулем 517 отслеживания импланта) опрашивающего устройства 502, которое описано выше относительно фиг. 5.
[0175] На этапе 1002, опрашивающее устройство установило состояние синхронизации с имплантируемым устройством, как описано выше относительно этапа 902 на фиг. 9. В частности, этап 1002 включает в себя этап 1004, на котором опрашивающее устройство определяет, что текущая сила сигнала, определенная из текущего ультразвукового обратно рассеянного излучения, удовлетворяет предварительно определенному пороговому значению. Как описано выше относительно фиг. 9, модуль отслеживания импланта опрашивающего устройства может быть сконфигурирован, чтобы определять силу сигнала из принятого ультразвукового обратно рассеянного излучения посредством извлечения сигнала импланта из ультразвукового обратно рассеянного излучения и определения силы сигнала для извлеченного сигнала импланта.
[0176] На этапе 1010, опрашивающее устройство отслеживает имплантируемое устройство посредством регулировки места, куда УЗ-луч фокусируется. В некоторых вариантах осуществления, этап 1010 включает в себя этапы 1012-1020.
[0177] На этапе 1012, опрашивающее устройство оценивает местоположение имплантируемого устройства на основе текущего ультразвукового обратно рассеянного излучения, соответствующего УЗ-лучу, фокусируемому на текущей фокусной точке. Например, модуль отслеживания импланта опрашивающего устройства может оценивать местоположение с помощью формирования луча для приема. В некоторых вариантах осуществления, оцененное местоположение может быть представлено расчетным углом для регулировки места, куда УЗ-луч фокусируется. В некоторых вариантах осуществления, оцененное местоположение может быть представлено расчетным углом УЗ-луча относительно массива преобразователей опрашивающего устройства. В некоторых вариантах осуществления, модуль отслеживания импланта может определять расчетный угол, который представляет оценку местоположения на основе использования формирования луча для приема. Например, направляя УЗ-луч и его соответствующую фокусную точку в направлении, указанной расчетным углом, расстояние между истинным местоположением имплантируемого устройства и фокусной точкой УЗ-луча может быть уменьшено.
[0178] На этапе 1014, опрашивающее устройство выполняет приращение позиции текущей фокусной точки по направлению к оцененному местоположению, в результате чего, текущая фокусная точка становится предыдущей фокусной точкой, а приращенная позиция становится текущей фокусной точкой. В некоторых вариантах осуществления, позиция может увеличиваться на предварительно определенную величину. Например, эта величина может быть равна, по меньшей мере, 0,1 мм, 0,2 мм, 0,25 мм, 0,5 мм, 0,6 мм. Например, эта величина может быть менее 0,7 мм, 0,6 мм, 0,5 мм, 0,4 мм, 0,25 мм или 0,2 мм. В некоторых вариантах осуществления, когда оцененное местоположение представляется расчетным углом, опрашивающее устройство может быть сконфигурировано, чтобы наращивать позицию текущей фокусной точки в направлении, указанной расчетным углом. Соответственно, посредством оценки местоположения имплантируемого устройства и регулирования того, куда УЗ-луч фокусируется, опрашивающее устройство может уменьшать число фокусных точек, которые необходимо исследовать, и увеличивает скорость исследования и эффективность.
[0179] На этапе 1016, опрашивающее устройство излучает УЗ-луч в текущую фокусную точку, соответствующую увеличенной (приращенной) позиции, и принимает ультразвуковое обратно рассеянное излучение, соответствующее излучаемому УЗ-лучу.
[0180] На этапе 1018, опрашивающее устройство определяет текущую силу сигнала на основе принятого ультразвукового обратно рассеянного излучения, соответствующего приращенной позиции. В некоторых вариантах осуществления, как описано выше относительно этапа 906 на фиг. 9, опрашивающее устройство может извлекать сигнал импланта (т.е. сигнал, внедренный имплантируемым устройством в ультразвуковое обратно рассеянное излучение) из обратно рассеянного излучения и определять силу сигнала для извлеченного сигнала импланта.
[0181] На этапе 1020, опрашивающее устройство сравнивает текущую силу сигнала с предыдущей силой сигнала, чтобы определять, выше ли текущая сила сигнала по сравнению с предыдущей силой сигнала. Другими словами, опрашивающее устройство может определять, увеличило ли приращение позиции фокуса луча из предыдущей фокусной точки в текущую фокусную точку силу сигнала, и, следовательно, улучшает совмещение между опрашивающим устройством и имплантируемым устройством.
[0182] В некоторых вариантах осуществления, если текущая сила сигнала увеличивается, тогда способ 1000 возвращается к этапу 1012, на котором опрашивающее устройство продолжает регулировать позицию фокусной точки. В некоторых вариантах осуществления, после того как текущая сила сигнала определяется как более не увеличивающаяся или не уменьшающаяся, опрашивающее устройство определяет, что локальная максимальная сила сигнала была определена, и что ассоциированная фокусная точка является ближайшей к местоположению имплантируемого устройства. В некоторых вариантах осуществления, опрашивающее устройство, по выбору, выполняет этап 1022, на котором позиция текущей фокусной точки регулируется. Например, опрашивающее устройство может возвращать приращенную позицию текущей фокусной точки на половину приращения, чтобы учитывать дискретную приращенную величину.
[0183] На этапе 1024, опрашивающее устройство устанавливает состояние устойчивого сигнала с имплантируемым устройством, сохраняя УЗ-луч сфокусированным на текущей фокусной точке.
[0184] Фиг. 11 иллюстрирует способ 1100 для отслеживания имплантируемого устройства, питаемого с помощью ультразвуковых волн, чтобы эффективно поддерживать мощность, подаваемую к имплантируемому устройству, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, способ 1100 иллюстрирует дополнительные детали, которые распространяются на этап 1024, который описан выше относительно фиг. 10. В некоторых вариантах осуществления, один или более этапов способа 1100 могут быть выполнены модулем отслеживания импланта (например, модулем 517 отслеживания импланта) опрашивающего устройства 502, который описан выше относительно фиг. 5.
[0185] На этапе 1102, опрашивающее устройство устанавливает состояние установившегося сигнала с имплантируемым устройством. В некоторых вариантах осуществления, этап 1102 включает в себя этапы 1104-1106.
[0186] На этапе 1104, опрашивающее устройство сохраняет силу сигнала, определенную из ультразвукового обратно рассеянного излучения, принятого в установившемся состоянии устойчивого сигнала. Другими словами, опрашивающее устройство может быть сконфигурировано, чтобы сохранять максимальную сил сигнала, которая была определена во время отслеживания имплантируемого устройства, как описано выше относительно фиг. 10.
[0187] На этапе 1106, опрашивающее устройство сохраняет фокусную точку, в которой сила сигнала была определена на этапе 1104. В некоторых вариантах осуществления, фокусная точка соответствует тому, куда УЗ-луч, излучаемый опрашивающим устройством, был нацелен.
[0188] На этапе 1108, опрашивающее устройство сохраняет излучаемый УЗ-луч сфокусированным на фокусной точке, определенной в состоянии устойчивого сигнала.
[0189] На этапе 1110, опрашивающее устройство наблюдает за силой сигнала для сигнала, извлекаемого из ультразвукового обратно рассеянного излучения, принимаемого, в то время как УЗ-луч излучается в фокусную точку. Например, аналогично этапу 906 на фиг. 9, модуль отслеживания импланта опрашивающего устройства может быть сконфигурирован, чтобы определять силу сигнала на основе извлечения сигнала импланта из ультразвукового обратно рассеянного сигнала.
[0190] На этапе 1112, опрашивающее устройство определяет, следует ли отрегулировать фокусную точку для излучаемого УЗ-луча, на основе сравнения наблюдаемой силы сигнала с сохраненной силой сигнала. В некоторых вариантах осуществления, если опрашивающее устройство определяет, что наблюдаемая сила сигнала не падает ниже предварительно определенного порогового значения сохраненной силы сигнала, способ 1100 возвращается к этапу 1108, на котором фокусная точка для излучаемого УЗ-луча сохраняется. Иначе, способ 1100 переходит к этапу 1114. В некоторых вариантах осуществления, опрашивающее устройство может определять, следует ли отрегулировать фокусную точку, на основе того, уменьшается ли наблюдаемая сила сигнала ниже процента сохраненной силы сигнала. Как описано выше, сохраненная сила сигнала представляет ранее идентифицированный локальный максимум. Соответственно, опрашивающее устройство может регулировать совмещение между опрашивающим устройством и имплантируемым устройством, чтобы противодействовать движению субъекта, которое вызывает изменение местоположения имплантируемого устройства.
[0191] В некоторых вариантах осуществления, в дополнение к наблюдению за силой сигнала для противодействия перемещению имплантируемого устройства, опрашивающее устройство может быть сконфигурировано, чтобы наблюдать за движением опрашивающего устройства, чтобы определять, следует ли и как регулировать фокусную точку излучаемого УЗ-луча, чтобы противодействовать перемещению опрашивающего устройства. Например, опрашивающее устройство может включать в себя один или более из инерциального блока движения (IMU), акселератора или гироскопа, чтобы обнаруживать и измерять перемещение опрашивающего устройства. В этих вариантах осуществления, опрашивающее устройство может вычислять регулировку позиции фокусной точки, которая противодействует измеренному перемещению. Например, посредством вычисления и применения этой регулировки, опрашивающее устройство может компенсировать небольшие перемещения руки оператора опрашивающего устройства посредством электронного регулирования ультразвукового луча, так что чистое изменение абсолютной позиции фокусной точки остается близким к нулю.
[0192] На этапе 1114, опрашивающее устройство входит в состояние отслеживания сигнала, чтобы увеличивать совмещение излучаемого УЗ-луча с имплантируемым устройством. В некоторых вариантах осуществления, этап 1114 соответствует этапу 910 на фиг. 9 и этапу 1010 на фиг. 10. В некоторых вариантах осуществления, этап 1114 включает в себя этапы 1116-1118.
[0193] На этапе 1116, опрашивающее устройство оценивает местоположение имплантируемого устройства на основе принятого ультразвукового обратно рассеянного излучения.
[0194] На этапе 1118, опрашивающее устройство излучает УЗ-луч, чтобы фокусироваться на фокусной точке ближе к оцененному местоположению. Как описано выше, опрашивающее устройство может использовать формирование луча для приема, чтобы определять направление регулировки фокусной точки, и приращение фокусной точки в определенном направлении. Как описано выше относительно фиг. 9-10, после того как имплантируемое устройство было отслежено, опрашивающее устройство может повторно устанавливать состояние устойчивого сигнала с имплантируемым устройством.
[0195] Фиг. 12 иллюстрирует примерную схему 1200, показывающую предварительно определенный шаблон, закодированный имплантируемым устройством в ультразвуковое обратное рассеянное излучение 1202, принимаемое опрашивающим устройством, согласно некоторым вариантам осуществления. Как показано в схеме 1200, ультразвуковое обратно рассеянное излучение 1202 имеет изменяющуюся амплитуду по времени (с дискретизацией при 25 МГц).
[0196] Как описано выше, когда опрашивающее устройство излучает УЗ-луч на имплантируемое устройство, ультразвуковые волны в УЗ-луче отражаются в форме ультразвукового обратно рассеянного излучения. Ультразвуковое обратно рассеянное излучение 1202 может включать в себя фрагмент 1204, изображающий отражение имплантом ультразвуковых волн, и фрагмент 1206, изображающий шаблон формы волны, внедренный имплантируемым устройством в ультразвуковое обратно рассеянное излучение 1202. В некоторых вариантах осуществления, как описано выше относительно фиг. 7, опрашивающее устройство может сравнивать ультразвуковое обратно рассеянное излучение 1202 с предварительно определенным шаблоном, ассоциированным с имплантируемым устройством, чтобы определять, совпадает ли оно с предварительно определенным шаблоном, ожидаемым для имплантируемого устройства, являющегося включенным.
[0197] Фиг. 13 иллюстрирует примерные диаграммы 1302-1308, которые показывают, насколько точно опрашивающее устройство рассчитывает местоположение имплантируемого устройства в режиме обнаружения, согласно некоторым вариантам осуществления. В четырех экспериментальных установках опрашивающее устройство было сконфигурировано выполнять способ 700 на фиг. 7. Как показано в диаграммах 1302-1308, уровень достоверности, определенный опрашивающим устройством относительно того, обнаруживается ли предварительно определенный шаблон имплантируемого устройства в ультразвуковом обратно рассеянном излучении среди множества фокусных точек, показанный как поперечный фокус, находится в диапазоне от 0,0 до 1,0.
[0198] В некоторых вариантах осуществления, опрашивающее устройство может быть сконфигурировано, чтобы применять статистические показатели к фокусным точкам, в которых предварительно определенный шаблон имплантируемого устройства обнаруживается с достоверностью выше порогового значения (например, 80%, 90%, 95% и т.д.), чтобы определять расчетное местоположение имплантируемого устройства. В примерных диаграммах 1302-1308, опрашивающее устройство было сконфигурировано вычислять спектральный центроид (т.е. центр массы) уровней достоверности (также называемый "оценкой") в диапазоне поперечного фокуса для фокусных точек. Как показано на фиг. 13, оцененные (расчетные) местоположения опрашивающего устройства в каждой из четырех экспериментальных установок были близки к истинному местоположению имплантируемых устройств.
[0199] Фиг. 14 иллюстрирует схему 1400 имплантируемого устройства 1411, сконфигурированного для взаимодействия с нервом 1414 субъекта, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления, имплантируемое устройство 1411 может быть примерной реализацией имплантируемого устройства 120 или 604, которые описаны выше относительно фиг. 1 и 6, соответственно. Как показано в схеме 1400, имплантируемое устройство 1411 может быть имплантировано на нерве 1414 и включать в себя один или более изогнутых элементов, таких как изогнутый элемент 1402, протягивающийся из основной части 1412. Основная часть 1412 имплантируемого устройства 1411 может включать в себя интегральную схему 1424 (включающую в себя, например, схему 612 модуляции и демодуляции, схему 614 стимуляции, схему 616 обнаружения или схему 620 контроллера), долговременную память 1426 (например, память 680), схему 1428 питания (например, схему 630 питания) и ультразвуковой преобразователь 1430 (например, ультразвуковой преобразователь 608 или схему 606 ультразвукового преобразователя). В некоторых вариантах осуществления, основная часть 1412 включает в себя множество ультразвуковых преобразователей, включающих в себя ультразвуковой преобразователь 1430. Соответственно, следует понимать, что ультразвуковой преобразователь 1430, как показано на схеме 800, может представлять множество ультразвуковых преобразователей.
[0200] В некоторых вариантах осуществления, ультразвуковой преобразователь 1430 может быть сконфигурирован, чтобы принимать ультразвуковые волны, передаваемые опрашивающим устройством (например, опрашивающим устройством 106 на фиг. 1 или опрашивающим устройством 502 на фиг. 5), и преобразовывать механическую энергию ультразвуковых волн в электрический сигнал, имеющий электрическую энергию. В некоторых вариантах осуществления, ультразвуковые волны могут включать в себя одну или более команд рабочего режима, которые обнаруживаются интегральной схемой 1424, чтобы задавать рабочий режим имплантируемого устройства 1411 в один рабочий режим из множества рабочих режимов. В некоторых вариантах осуществления, электрический сигнал включает в себя электрические представления одной или более команд рабочего режима.
[0201] В некоторых вариантах осуществления, фрагмент электрического сигнала может быть обработан схемой 1428 питания, чтобы питать компоненты имплантируемого устройства 1411. В некоторых вариантах осуществления, схема 1428 питания может включать в себя схему конвейера мощности (например, схему 634 конвейера мощности), сконфигурированную, чтобы преобразовывать электрический сигнал, имеющий первое напряжения, во второй сигнал, имеющий второе напряжение, чтобы питать различные компоненты интегральной схемы 1424. В некоторых вариантах осуществления, схема 1428 питания может включать в себя выпрямляющую схему (например, активный выпрямитель), чтобы преобразовывать электрический сигнал в AC-форме в DC-форму, когда преобразованный электрический сигнал может быть ассоциирован с первым напряжением. В некоторых вариантах осуществления, схема конвейера мощности может включать в себя генератор накачки заряда, чтобы формировать второе напряжение, большее по сравнению с первым напряжением. В некоторых вариантах осуществления, схема 1428 питания может включать в себя устройство сохранения энергии (например, устройство 636 сохранения энергии), сконфигурированное, чтобы сохранять избыточную энергию, предоставляемую посредством электрического сигнала, и работать в качестве вспомогательного источника питания, если мощность, подаваемая опрашивающим устройством, является недостаточным. В некоторых вариантах осуществления, схема конвейера мощности может быть сконфигурирована, чтобы управлять тем, должна ли мощность передаваться к или от устройства сохранения энергии, которая эффективно заряжает или разряжает устройство сохранения энергии, соответственно. В некоторых вариантах осуществления, схема конвейера мощности может быть сконфигурирована, чтобы управлять интервалом времени (например, числом тактовых циклов), когда мощность передается, в дополнение к направлению потока мощности (например, в прямом потоке или в обратном потоке).
[0202] В некоторых вариантах осуществления, интегральная схема 1424 включает в себя схему контроллера (например, схему 620 контроллера), сконфигурированную, чтобы задавать рабочий режим имплантируемого устройства 1411 на основе команды рабочего режима, принятой в ультразвуковых волнах.
[0203] В некоторых вариантах осуществления, команда рабочего режима может инструктировать имплантируемому устройству 1411 входить в режим синхронизации мощности, в котором схема контроллера может формировать информацию, указывающую имплантируемое устройство 1411. Например, интегральная схема 1424 может быть сконфигурирована, чтобы модулировать электрический сигнал, чтобы внедрять предварительно определенный шаблон в ультразвуковое обратно рассеянное излучение, испускаемое имплантируемым устройством 1411. Как описано выше относительно фиг. 1-13, опрашивающее устройство, принимающее ультразвуковое обратно рассеянное излучение, может извлекать предварительно определенный шаблон, чтобы обнаруживать или отслеживать местоположение имплантируемого устройства 1411. Посредством регулировки фокуса луча для излучаемого УЗ-луча опрашивающее устройство может более эффективно совмещать УЗ-луч с имплантируемым устройством 1411, чтоб поддерживать достаточную мощность, подаваемую к имплантируемому устройству 1411. Более того, поскольку УЗ-луч, излучаемый опрашивающим устройством, используется как для питания, так и для связи с имплантируемым устройством 1411, поддержание достаточной мощности также улучшает ультразвуковую связь между опрашивающим устройством и имплантируемым устройством 1411.
[0204] В некоторых вариантах осуществления, команда рабочего режима может инструктировать имплантируемому устройству 1411 вход в режим стимуляции нервов или режим обнаружения, каждый из которых может задействовать электродные площадки 1418 на изогнутом элементе 1402. В некоторых вариантах осуществления, режим обнаружения может быть примером режима восходящей линии связи, ассоциированным с передачей данных устройства другим устройствам, таким как опрашивающее устройство. В некоторых вариантах осуществления, в режиме обнаружения, электродные площадки 1418 конфигурируются, чтобы обнаруживать электрофизиологический сигнал, и сигнал обнаружения на основе электрофизиологического сигнала принимается интегральной схемой 1424. Сигнал обнаружения, принятый интегральной схемой 1424, может быть обработан (например, усилен, оцифрован и/или отфильтрован) схемой обнаружения (например, схемой 616 обнаружения), прежде чем принимается схемой контроллера. В некоторых вариантах осуществления, схема контроллера может осуществлять доступ к долговременной памяти (например, памяти 680), чтобы сохранять данные, относящиеся к обнаруженному электрофизиологическому сигналу. В некоторых вариантах осуществления, в режиме обнаружения, схема контроллера может быть сконфигурирована, чтобы задействовать ультразвуковой преобразователь 1430 для излучения обратно рассеянного излучения принятых ультразвуковых волн, в котором обратно рассеянные ультразвуковые волны кодируют данные, относящиеся к обнаруженному электрофизиологическому сигналу.
[0205] В некоторых вариантах осуществления, команда рабочего режима может инструктировать имплантируемому устройству 1411 входить в режим стимуляции нерва. В режиме стимуляции, схема контроллера может формировать сигнал стимуляции на основе сигнала обнаружения и задействовать одну или более электродных площадок 1418, чтобы испускать электрический импульс нерву 1414 на основе сигнала стимуляции. В некоторых вариантах осуществления, схема контроллера может осуществлять доступ к долговременной памяти (например, памяти 680), чтобы сохранять данные, связанные с сигналом стимуляции или электрическим импульсом, испускаемым нерву 1414. В некоторых вариантах осуществления, в режиме стимуляции, схема контроллера может быть сконфигурирована, чтобы задействовать ультразвуковой преобразователь 1430 для излучения обратно рассеянного излучения принятых ультразвуковых волн, в котором обратно рассеянные ультразвуковые волны кодируют данные, относящиеся к состоянию стимуляции.
[0206] Данные, сохраненные в долговременной памяти, могут быть беспроводным образом переданы посредством ультразвуковых обратно рассеянных волн, излучаемых ультразвуковым преобразователем 1430. Как описано выше относительно фиг. 6, чтобы передавать данные с помощью ультразвукового обратно рассеянного излучения, ультразвуковой преобразователь 1430 может сначала принимать ультразвуковые волны и формировать электрический ток, который протекает через схему модуляции. Затем, схема контроллера может осуществлять доступ к памяти и задействовать схему модуляции, чтобы модулировать электрический ток, протекающий через схему модуляции, чтобы кодировать данные. Посредством такого процесса, ультразвуковые обратно рассеянные волны, излучаемые ультразвуковым преобразователем 1430, могут кодировать данные.
[0207] В некоторых вариантах осуществления, как показано в схеме 1400, изогнутый элемент 1402 может включать в себя первый фрагмент 1402a и второй фрагмент 1402b, соединенные мостом посредством основной части 1412 в точке 1416. В некоторых вариантах осуществления, первый фрагмент 1402a и второй фрагмент 1402b являются непосредственно соединенными, и изогнутый элемент 1402 присоединяется к основной части 1412 через соединительный элемент. Изогнутый элемент 1402 может включать в себя множество электродных площадок 1418 на внутренней поверхности изогнутого элемента 1402, и электродные площадки 1418 могут быть радиально размещены вокруг оси, параллельной длине нерва 1414. Разделение 1420 между первым фрагментом 1402a и вторым фрагментом 1402b присутствует вдоль изогнутого элемента 1402 (которое может аналогично присутствовать в других изогнутых элементах имплантируемого устройства 1411). В некоторых вариантах осуществления, имплантируемое устройство 1411 может быть имплантировано посредством сгибания первого фрагмента 1402a и второго фрагмента 1402b изогнутого элемента 1402 наружу, тем самым расширяя размер разделения и предоставляя возможность нерву 1414 или другой волокнистой ткани проходить через разделение 1420 и помещаться в цилиндрическом пространстве, сформированном изогнутым элементом 1402. Первый фрагмент 1402a и второй фрагмент 1402b изогнутого элемента 1402 могут быть разъединены, что предоставляет возможность изогнутому элементу 1402 наматываться вокруг нерва 1414 или другой волокнистой ткани.
[0208] Множество электродных площадок 1418 из показанных на фиг. 14 находятся снаружи нерва 1414, но в непосредственном контакте с эпиневрием нерва 1414. Нерв 1414 может включать в себя несколько пучков 1422. В некоторых вариантах осуществления, электродные площадки 1418 в изогнутом элементе 1402 могут быть задействованы для нацеленного испускания электрического импульса на один или более пучков 1422 или другое подмножество нервных волокон, и/или задействованы для нацеленного обнаружения электрофизиологического сигнала, передаваемого одним или более пучками 1422 или другим подмножеством нервных волокон. Например, электродные площадки 1418 могут быть выборочно активизированы схемой контроллера в интегральной схеме 1424, которая размещается в основной части 1412, чтобы испускать электрический импульс, нацеленный на один или более пучков 1422. В другом примере, электродные площадки 418 задействуются схемой контроллера, чтобы обнаруживать электрофизиологический сигнал, передаваемый одним или более пучками 1422 в нерве 1414. В некотором варианте осуществления, изогнутый элемент 1402 может быть сконфигурирован, чтобы обнаруживать электрофизиологический сигнал, передаваемый нервом 1414 или подмножеством нервных волокон, испускать электрический импульс нерву 1414 или нацеленный на подмножество нервных волокон, или обнаруживать электрофизиологический сигнал, передаваемый нервом 1414 или подмножеством нервных волокон, и испускать электрический импульс нерву 1414 или нацеленный на подмножество нервных волокон. Например, имплантируемое устройство 1411 может включать в себя множество изогнутых элементов (включающих в себя изогнутый элемент 1402), в котором первый изогнутый элемент может быть сконфигурирован обнаруживать электрофизиологический сигнал, передаваемый нервом 1414 или подмножеством нервных волокон, а второй изогнутый элемент может быть сконфигурирован, чтобы испускать электрический импульс нерву 1414, или нацелен на подмножество нервных волокон.
[0209] В некоторых вариантах осуществления, изогнутый элемент 1402 может иметь подобран по размеру, чтобы зацеплять выбранный нерв 1414 или волокнистую ткань, содержащую нерв 1414. Нерв 1414 может быть спинным мозгом или периферическим нервом. В некоторых вариантах осуществления, нерв 1414 является вегетативным нервом или соматическим нервом. В некоторых вариантах осуществления, нерв 1414 является симпатическим нервом или парасимпатическим нервом. В некоторых вариантах осуществления, нерв 1414 является черепным нервом, мезентериальным нервом, селезеночным нервом, седалищным нервом, большеберцовым нервом, половым нервом, чревным ганглием, крестцовым нервом или любым их ответвлением.
[0210] Размер, форма и разнесение изогнутого элемента 1402 на имплантируемом устройстве 1411 могут зависеть от типа и размера ткани, которую имплантируемое устройство 1411 зацепляет. В некоторых вариантах осуществления, два или более изогнутых элемента имплантируемого устройства 1411 разнесены примерно на 0,25 мм или более (например, около 0,5 мм или более, около 1 мм или более, около 2 мм или более, около 3 мм или более, около 4 мм или более, около 5 мм или более, около 6 мм или более, или около 7 мм или более). В некоторых вариантах осуществления, два или более изогнутых элемента разнесены примерно на 8 мм или менее (например, около 7 мм или менее, около 6 мм или менее, около 5 мм или менее, около 4 мм или менее, около 3 мм или менее, около 2 мм или менее, около 1 мм или менее, или около 0,5 мм или менее). В качестве примера, два или более изогнутых элемента могут быть разнесены примерно от 0,25 мм примерно до 0,5 мм, примерно от 0,5 мм примерно до 1 мм, примерно от 1 мм примерно до 2 мм, примерно от 2 мм примерно до 3 мм, примерно от 3 мм примерно до 4 мм, примерно от 4 мм примерно до 5 мм, примерно от 5 мм примерно до 6 мм, примерно от 5 мм примерно до 7 мм, или примерно от 7 мм примерно до 8 мм друг от друга. Ширина изогнутого элемента 1402 может также изменяться в зависимости от применения имплантируемого устройства 1411 или ткани, зацепляемой имплантируемым устройством 1411. В некоторых вариантах осуществления, ширина изогнутого элемента 1402 равна примерно 100 мкм или более (например, около 150 мкм или более, около 250 мкм или более, около 500 мкм или более, около 1 мм или более или около 1,5 мм или более). В некоторых вариантах осуществления, ширина изогнутого элемента 1402 равна примерно 2 мм или менее (например, около 1,5 мм или менее, примерно 1 мм или менее, примерно 500 мкм или менее, примерно 250 мкм или менее или примерно 150 мкм или менее. В некоторых вариантах осуществления, ширина изогнутых элементов 1402 равна примерно от 100 мкм примерно до 2 мм (например, примерно от 100 мкм примерно до 150 мкм, примерно от 150 мкм примерно до 250 мкм, примерно от 250 мкм примерно до 500 мкм, примерно от 500 мкм примерно до 1 мм, примерно от 1 мм примерно до 1,5 мм или примерно от 1,5 мм примерно до 2 мм). Внутренняя поверхность изогнутого элемента 1402 формирует цилиндрическое пространство, через которое проходит нерв 1414 и/или волокнистая ткань. Диаметр цилиндрического пространства, сформированного изогнутым элементом 402, зависит от целевого нерва и/или волокнистой ткани, которую имплантируемое устройство 1411 будет зацеплять. В некоторых вариантах осуществления, изогнутый элемент 1402 формирует цилиндрическое пространство с диаметром примерно от 50 мкм примерно до 15 мм (например, примерно от 50 мкм примерно до 100 мкм, примерно от 100 мкм примерно до 250 мкм, примерно от 250 мкм примерно до 500 мкм, примерно от 500 мкм примерно до 1 мм, примерно от 1 мм примерно до 1,5 мм, примерно от 1,5 мм примерно до 2,5 мм, примерно от 2,5 мм примерно до 5 мм, примерно от 5 мм примерно до 10 мм, или примерно от 10 мм примерно до 15 мм).
[0211] В некоторых вариантах осуществления, имплантируемое устройство 1411 включает в себя один или более дополнительных закрепляющих элементов, сконфигурированных, чтобы прикреплять имплантируемое устройство 1411 к волокнистой ткани. Такие закрепляющие элементы могут включать в себя, например, хомуты для пришивания имплантируемого устройства к анатомической структуре (такой как волокнистая ткань или нерв, или другая ткань, окружающая волокнистую ткань или нерв), шипы или зажимы. Например, имплантируемое устройство 1411 может быть пришито к волокнистой ткани или нерву 1414, или ткани, окружающей волокнистую ткань или нерв, чтобы ограничивать перемещение имплантируемого устройства 1411 после имплантации.
[0212] В некотором варианте осуществления, изогнутый элемент 1402 имплантируемого устройства 1411 может включать в себя металл, сплав металла, керамику, силикон или неполимерный материал. Изогнутый элемент 1402 может быть гибким и предпочтительно является подпружиненным, так что изогнутый элемент 1402 может быть размещен вокруг нерва 1414 и/или волокнистой ткани. В некоторых вариантах осуществления, изогнутый элемент 1402 или фрагмент изогнутого элемента 1402 покрывается эластомерным покрытием или неэластомерным покрытием, которое предпочтительно является биоинертным, таким как полидиметилсиолоксан (PDMS), силикон, уретановый полимер, поли(p-ксилилен)полимером (таким как поли(p-ксилилен) полимер, продаваемый под торговой маркой PARYLENE®) или полиимид. Изогнутый элемент 1402 может включать в себя множество электродных площадок 1418 на внутренней поверхности. В некоторых вариантах осуществления, электродные площадки 1418 на внутренней поверхности изогнутого элемента 1402 не покрываются эластомерным покрытием или неэластомерным полимерным покрытием, хотя внутренняя поверхность может быть покрыта токопроводящим материалом (например, гальванически покрыта полимером PEDOT или металлом, чтобы улучшать электрические характеристики электродной площадки). Соответственно, в некоторых вариантах осуществления, только внешняя поверхность изогнутого элемента 402 покрывается покрытием. Необязательно, покрытие дополнительно покрывает корпус основной части 1412.
[0213] В некоторых вариантах осуществления, множество электродных площадок 1418 могут включать в себя 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20 или более электродных площадок, например, между примерно 3 и примерно 50 электродными площадками, между примерно 3 и примерно 5 электродными площадками, между примерно 5 и примерно 10 электродными площадками, между примерно 10 и примерно 25 электродными площадками, или между примерно 25 и примерно 50 электродными площадками. В некоторых вариантах осуществления, электродные площадки во множестве электродных площадок 1418 могут быть выборочно активизированы схемой контроллера, что предоставляет возможность нацеленного испускания электрического импульса, как дополнительно описано в данном документе.
[0214] В некоторых вариантах осуществления, электродные площадки 1418 могут включать в себя любой подходящий токопроводящий материал, такой как один или более (или сплав одного или более) из вольфрама, платины, палладия, золота, иридия, ниобия, тантала или титана. Материал обнаруживающих электродных площадок и стимулирующих электродных площадок может быть одинаковым или различным. Размер и форма электродных площадок 1418 могут также быть одинаковыми или различными. Например, электродные площадки 1418 на заданном изогнутом элементе 1402 могут быть одинакового или различного размера, и электродные площадки на различных изогнутых элементах могут быть одинакового или различного размера.
[0215] В некоторых вариантах осуществления, электродные площадки 1418 имплантируемого устройства 1411 позиционируются посредством изогнутого элемента 1402, чтобы быть в электрической связи с нервом 1414. В некоторых вариантах осуществления, электродные площадки 1418 не находятся в непосредственном контакте с нервом 1414 (например, снаружи и не в опосредованном контакте с нервом 1414), но находятся на электрической связи с нервом 1414. В некоторых вариантах осуществления, электродные площадки 1418 позиционируются примерно в 2 мм (например, примерно в 1,8 мм, примерно в 1,6 мм, примерно в 1,4 мм, примерно в 1,2 мм, примерно в 1,0 мм, примерно в 0,8 мм, примерно в 0,6 мм, примерно в 0,4 мм или примерно в 0,2 мм) нерва 1414. В некоторых вариантах осуществления, электродные площадки 1418 конфигурируются, чтобы пронизывать эпиневрий нерва 1414 в одном или более местоположениях. Например, электродные площадки 1418 могут быть в форме иглы, что предоставляет возможность пронизывания эпиневрия. В некоторых вариантах осуществления, электродные площадки 1418 непосредственно контактируют с нервом 1414, например, эпиневрием нерва 1414.
[0216] В некоторых вариантах осуществления, основная часть 1412 включает в себя корпус, который может включать в себя основание, одну или более боковых стенок и верхнюю часть. Корпус может заключать в себе ультразвуковой преобразователь 1430 и интегральную схему 1424. Корпус может быть герметично закрыт (например, посредством пайки или лазерной сварки), чтобы предотвращать контактирование интерстициальной жидкости с ультразвуковым преобразователем 1430 или интегральной схемой 1424. Корпус предпочтительно изготавливается из биоинертного материала, такого как биоинертный металл (например, сталь или титан) или биоинертная керамика (например, окись титана или окись алюминия). Корпус (или верхняя сторона корпуса) может быть тонким, чтобы предоставлять возможность ультразвуковым волнам проникать через корпус. В некоторых вариантах осуществления, толщина корпуса равна примерно 100 микрометров (мкм) или менее по толщине, например, примерно 75 мкм или менее, примерно 50 мкм или менее, примерно 25 мкм или менее или примерно 10 мкм или менее. В некоторых вариантах осуществления, толщина корпуса равна примерно от 5 мкм примерно до 10 мкм, примерно от 10 мкм примерно до 25 мкм, примерно от 25 мкм примерно до 50 мкм, примерно от 50 мкм примерно до 75 мкм, или примерно от 75 мкм примерно до 100 мкм по толщине.
[0217] В некоторых вариантах осуществления, основная часть 1412 имплантируемого устройства 1411 является относительно небольшой, что предоставляет возможность для комфортной и долговременной имплантации, в то же время ограничивая воспаление ткани, которое часто ассоциируется с имплантируемыми медицинскими устройствами. В некоторых вариантах осуществления, наибольший размер основной части 1412 равен примерно 10 мм или менее, например, примерно от 5 мм примерно до 9 мм, или примерно от 6 мм примерно до 8 мм. Например, наибольший размер может быть длиной или высотой основной части 1412 имплантируемого устройства 1411. В некоторых вариантах осуществления, наибольшая ширина основной части 1412 равна примерно 5 мм или менее, например, примерно от 2 мм до 5 мм или примерно от 3 мм до 4 мм.
[0218] В некоторых вариантах осуществления, основная часть 1412 включает в себя такой материал как полимер, в корпусе. Материал может заполнять пустое пространство в корпусе, чтобы снижать несоответствие акустического импеданса между тканью снаружи корпуса и в корпусе. Соответственно, основная часть 1412 предпочтительно лишена воздуха или является вакуумной, согласно некоторым вариантам осуществления.
[0219] В некоторых вариантах осуществления, ультразвуковой преобразователь 1430 может включать в себя микромеханический ультразвуковой преобразователь, такой как емкостной микромеханический ультразвуковой преобразователь (CMUT) или пьезоэлектрический микромеханический ультразвуковой преобразователь (PMUT), или может включать в себя объемный пьезоэлектрический преобразователь. Объемные пьезоэлектрические преобразователи могут быть любым натуральным или синтетическим материалом, таким как кристалл, керамика или полимер. Примерные материалы объемного пьезоэлектрического преобразователя могут включать в себя титанат бария (BaTiO3), цирконат-титанат свинца (PZT), оксид цинка (ZO), нитрид алюминия (AlN), кварц, берлинит (AlPO4), топаз, лангасит (La3Ga5SiO14), ортофосфат галлия (GaPO4), ниобат лития (LiNbO3), танталит лития (LiTaO3), ниобат калия (KNbO3), вольфрамат натрия (Na2WO3), феррит висмута (BiFeO3), поливинилиден (ди)фторид (PVDF) и ниобат свинца-магния - титанат свинца (PMN-PT).
[0220] В некоторых вариантах осуществления, объемный пьезоэлектрический преобразователь является приблизительно кубическим (т.е. соотношение сторон равно примерно 1:1:1 (длина:ширина:высота)). В некоторых вариантах осуществления, пьезоэлектрический преобразователь является пластинчатым, с соотношением сторон примерно 5:5:1 или больше либо в отношении длины, либо ширины, например, примерно 7:5:1 или более, или примерно 10:10:1 или более. В некоторых вариантах осуществления, объемный пьезоэлектрический преобразователь является длинным и узким, с соотношением сторон примерно 3:1:1 или более, при этом наибольший размер выравнивается в направлении ультразвуковых обратно рассеянных волн (т.е. оси поляризации). В некоторых вариантах осуществления, один размер объемного пьезоэлектрического преобразователя равняется одной половине длины волны (λ), соответствующей задающей частоте или резонансной частоте измерительного преобразователя. При резонансной частоте ультразвуковая волна, наталкивающаяся на ту или другую лицевую сторону преобразователя, будет подвергаться сдвигу фаз 180º, чтобы достигать противоположной фазы, вызывая наибольшее смещение между двумя лицевыми сторонами. В некоторых вариантах осуществления, высота пьезоэлектрического преобразователя равна примерно от 10 мкм примерно до 1000 мкм (например, примерно от 40 мкм примерно до 400 мкм, примерно от 100 мкм примерно до 250 мкм, примерно 250 мкм примерно до 500 мкм или примерно 500 мкм примерно до 1000 мкм). В некоторых вариантах осуществления, высота пьезоэлектрического преобразователя равна примерно 5 мм или менее (например, около 4 мм или менее, около 3 мм или менее, около 2 мм или менее, около 1 мм или менее, около 500 мкм или менее, около 400 мкм или менее, 250 мкм или менее, около 100 мкм или менее, или около 40 мкм или менее). В некоторых вариантах осуществления, высота пьезоэлектрического преобразователя равна примерно 20 мкм или более (например, около 40 мкм или более, около 100 мкм или более, около 250 мкм или более, около 400 мкм или более, около 500 мкм или более, около 1 мм или более, около 2 мм или более, около 3 мм или более, или около 4 мм или более) по длине.
[0221] В некоторых вариантах осуществления, ультразвуковой преобразователь 1430 имеет длину около 5 мм или менее (например, около 4 мм или менее, около 3 мм или менее, около 2 мм или менее, около 1 мм или менее, около 500 мкм или менее, около 400 мкм или менее, 250 мкм или менее, около 100 мкм или менее, или около 40 мкм или менее) в наибольшем измерении. В некоторых вариантах осуществления, ультразвуковой преобразователь 1430 имеет длину около 20 мкм или более (например, около 40 мкм или более, около 100 мкм или более, около 250 мкм или более, около 400 мкм или более, около 500 мкм или более, около 1 мм или более, около 2 мм или более, около 3 мм или более, или около 4 мм или более) в наибольшем измерении.
[0222] В некоторых вариантах осуществления, ультразвуковой преобразователь 1430 соединяется с двумя электродами, чтобы предоставлять возможность электрической связи с интегральной схемой 1424. Первый электрод присоединяется к первой лицевой поверхности ультразвукового преобразователя 1430, а второй электрод присоединяется ко второй лицевой поверхности ультразвукового преобразователя 1430, при этом первая лицевая поверхность и вторая лицевая поверхность находятся на противоположных сторонах ультразвукового преобразователя 1430 в одном измерении. В некоторых вариантах осуществления, электроды включают в себя серебро, золото, платину, платиновую чернь, поли(3,4-этилендиокситиофен (PEDOT)), токопроводящий полимер (такой как токопроводящий PDMS или полиимид), или никель. В некоторые варианты осуществления, ось между электродами ультразвукового преобразователя 1430 является ортогональной движению ультразвукового преобразователя 1430.
[0223] Предшествующее описание излагает примерные способы, параметры и т.п. Следует признать, однако, что такое описание не предназначается в качестве ограничения на рамки настоящего открытия, а вместо этого предоставляется в качестве описания примерных вариантов осуществления. Иллюстративные варианты осуществления, описанные выше, не предназначены, чтобы быть исчерпывающими или ограничивать открытие точными раскрытыми формами. Многие модификации и разновидности являются возможными в свете вышеупомянутых учений. Варианты осуществления были выбраны и описаны, чтобы лучше объяснять принципы раскрытых методов и их практических применений. Специалистам в области техники, таким образом, предоставляется возможность использовать методы и различные варианты осуществления с различными модификациями, которые являются подходящими для конкретного рассматриваемого использования.
[0224] Хотя описание и примеры были полностью описаны со ссылкой на сопровождающие чертежи, следует отметить, что различные изменения и модификации станут очевидны специалистам в области техники. Такие изменения и модификации следует понимать как включенные в рамки описания и примеров, которые определены формулой изобретения. В предшествующем описании изобретения и вариантов осуществления ссылка делается на сопровождающие чертежи, на которых показаны, в качестве иллюстрации, конкретные варианты осуществления, которые могут быть применены на практике. Следует понимать, что другие варианты осуществления и примеры могут быть применены на практике, и изменения могут быть выполнены без отступления от рамок настоящего открытия.
[0225] Хотя предшествующее описание использует термины "первый", "второй" и т.д. для описания различных элементов, эти элементы не должны быть ограничены терминами. Эти термины используются только для того, чтобы отличать один элемент от другого.
[0226] Ссылка на "примерное" или "приблизительное" значение или параметр в данном документе включает в себя (и описывает) разновидности, которые направлены на это значение или параметр как таковой. Например, описание, ссылающееся на "примерно X", включает в себя описание для "X".
[0227] Понятно, что аспекты и варианты изобретения, описанные в данном документе, включают в себя "состоящий" и/или "состоящий по существу из" аспектов и вариантов.
[0228] Термины "имплантируемый" и "имплантированный" ссылаются на объект, полностью имплантируемый или полностью имплантированный в субъекте, так что фрагмент объекта не прорывает поверхность субъекта.
[0229] Термин "в значительной степени" ссылается на 90% или более. Например, изогнутый элемент, который, в значительной степени, окружает поперечное сечение нерва, ссылается на изогнутый элемент, который окружает 90% или более поперечного сечения нерва.
[0230] Термины "субъект" и "пациент" используются взаимозаменяемого в данном документе, чтобы ссылаться на позвоночное животное, такое как человек.
[0231] Термины "обрабатывать", "обрабатывающий" и "обработка" используются синонимично в данном документе, чтобы ссылаться на какое-либо действие, предоставляющее пользу для субъекта, пораженного болезненным состоянием или заболеванием, включающее в себя улучшение в состоянии посредством уменьшения, подавления, пресечения или устранения, по меньшей мере, одного симптома, задержки в прогрессировании болезни или заболевания, задержки в рецидиве болезни или заболевания, или сдерживания болезни или заболевания.
[0232] Когда предоставляется диапазон значений, следует понимать, что каждое промежуточное значение между верхним и нижним пределом этого диапазона, и какое-либо другое сформулированное или промежуточное значение в этом сформулированном диапазоне охватывается рамками настоящего изобретения. Когда сформулированный диапазон включает в себя верхний или нижний пределы, диапазоны, исключающие один из этих двух включенных пределов, также включаются в настоящее изобретение.
[0233] Кроме того, также следует понимать, что элементы (формы) единственного числа, использованные в описании, предполагают включать в себя также множественные формы, пока контекст явно не указывает иное. Также следует понимать, что термин "и/или", когда используется в данном документе, ссылается на и охватывает любое и все возможные сочетания одного или более ассоциированных перечисленных элементов. Дополнительно следует понимать, что термины "включает в себя", "включающий в себя", "содержит" и/или "содержащий", когда используются в данном документе, указывают наличие изложенных признаков, целых частей, этапов, операций, элементов, компонентов и/или блоков, но не исключают заранее наличие или добавление одного или более других признаков, целых частей, этапов, операций, элементов, компонентов, блоков и/или их групп.
[0234] Термин "если" может быть истолкован как означающий "когда" или "при" или "в ответ на определение" или "в ответ на обнаружение", в зависимости от контекста. Аналогично, фраза "если определяется" или "если [сформулированное условие или событие] обнаруживается" может быть истолкована как означающая "при определении" или "в ответ на определение" или "при обнаружении [сформулированного условия или события]" или "в ответ на обнаружение [сформулированного условия или события]", в зависимости от контекста.
[0235] Признаки и предпочтения, описанные выше относительно "вариантов осуществления" являются отдельными предпочтениями и не ограничиваются только этим конкретным вариантом осуществления; они могут быть свободно объединены с признаками из других вариантов осуществления, когда технически возможно, и могут формировать предпочтительные сочетания признаков. Описание представляется, чтобы предоставлять возможность обычному специалисту в области техники создавать и использовать изобретение, и предоставляется в контексте патентной заявки и его требований. Различные модификации в описанных вариантах осуществления будут легко очевидны специалистам в области техники, и общие принципы в данном документе могут быть применены к другим вариантам осуществления. Таким образом, настоящее изобретение не имеет намерением ограничиваться показанным вариантом осуществления, а должно удовлетворять самой широкой области применения, согласованной с принципами и признаками, раскрытыми в данном документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГЕТИЧЕСКАЯ МОДУЛЯЦИЯ НЕРВОВ | 2010 |
|
RU2523129C2 |
| СИСТЕМА ДЛЯ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ ДЕФЕКТОВ В СТЕНКЕ ТРУБЫ | 2009 |
|
RU2491543C2 |
| СИСТЕМЫ И СПОСОБЫ ИЗМЕРЕНИЯ УПРУГОСТИ С ВИЗУАЛИЗАЦИЕЙ УЛЬТРАЗВУКОВЫХ МНОГОФОКУСНЫХ СДВИГОВЫХ ВОЛН В МНОЖЕСТВЕ ИЗМЕРЕНИЙ | 2020 |
|
RU2828776C2 |
| МЕДИЦИНСКОЕ УСТРОЙСТВО ДЛЯ НАГРЕВАНИЯ НАГРЕВАЕМОГО ОБЪЕМА, ЗАДАННОГО ПОВЕРХНОСТЬЮ | 2013 |
|
RU2641634C2 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОЙ ИНТРОСКОПИИ | 2008 |
|
RU2359265C1 |
| Светорассеивающие устройства для использования в фотоиммунотерапии | 2017 |
|
RU2741076C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ СТРУКТУР МОЗГА ЧЕРЕЗ ТОЛСТЫЕ КОСТИ ЧЕРЕПА | 2015 |
|
RU2636851C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ КОСМЕТИЧЕСКОЙ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ КОЖИ | 2017 |
|
RU2785827C2 |
| ОБНАРУЖЕНИЕ И НАБЛЮДЕНИЕ ЗА ОТЛИЧИТЕЛЬНЫМИ ПРИЗНАКАМИ ПЛАСТА МЕСТОРОЖДЕНИЯ С ПОМОЩЬЮ ОПТИЧЕСКОГО ВОЛОКНА | 2021 |
|
RU2823220C1 |
| Способ определения акустической плотности | 2017 |
|
RU2657314C1 |
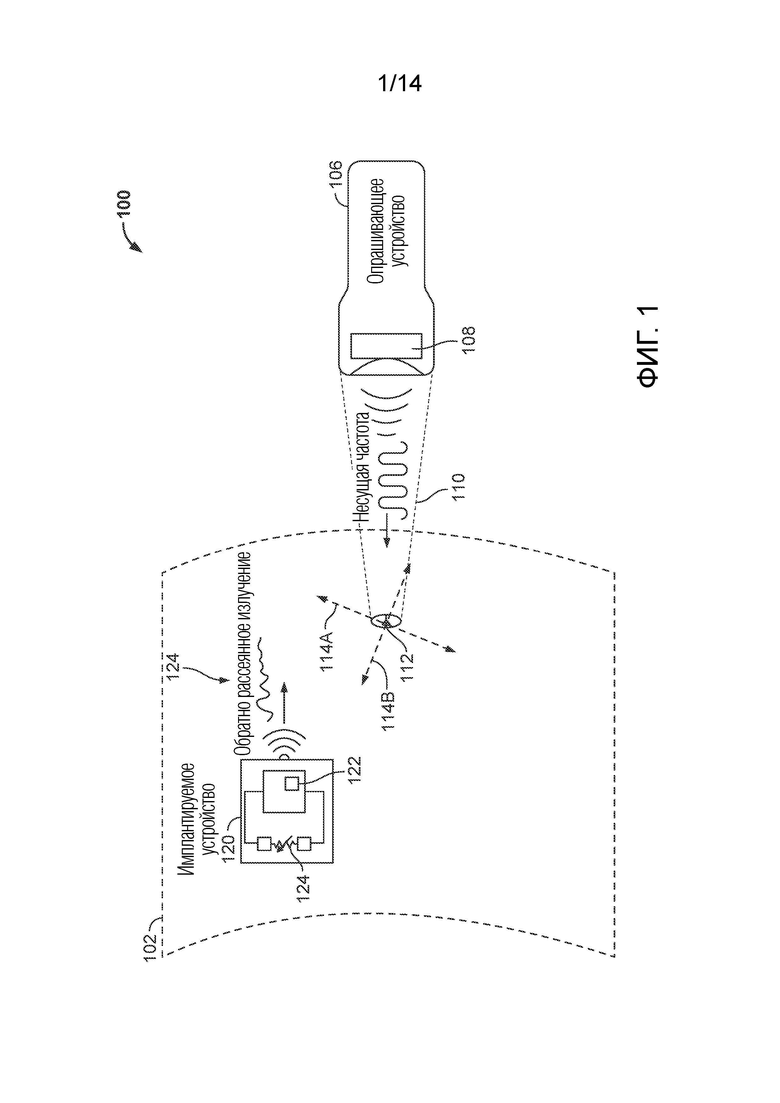
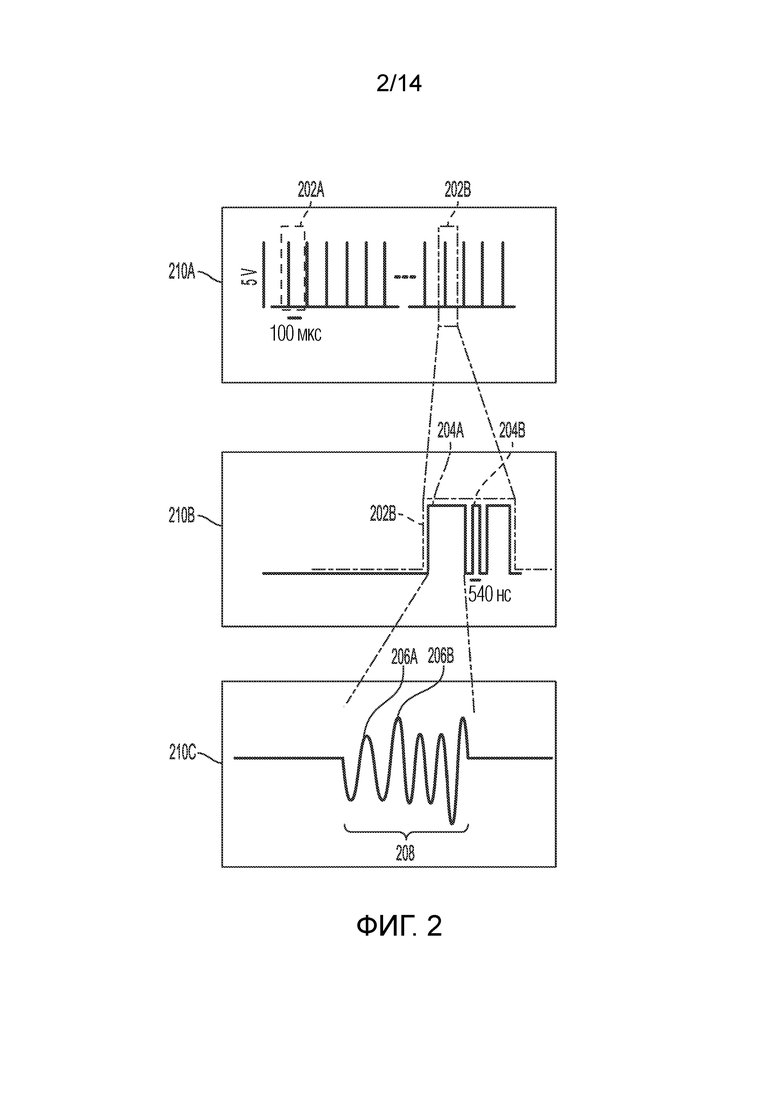
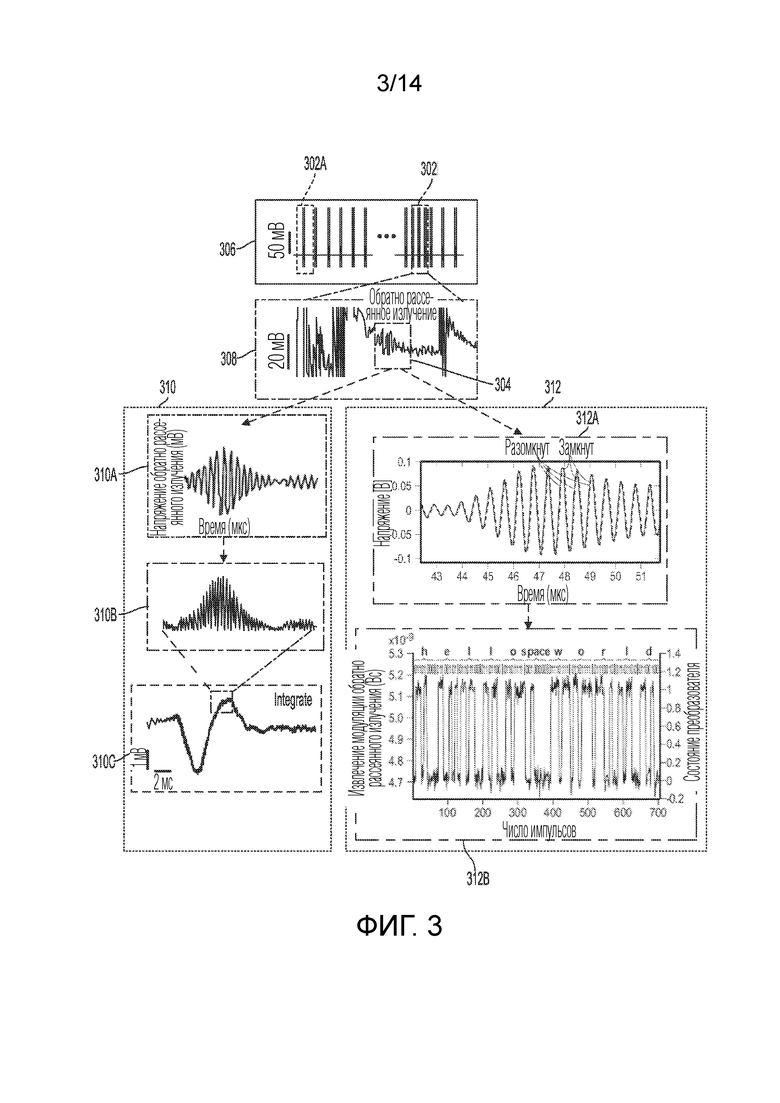
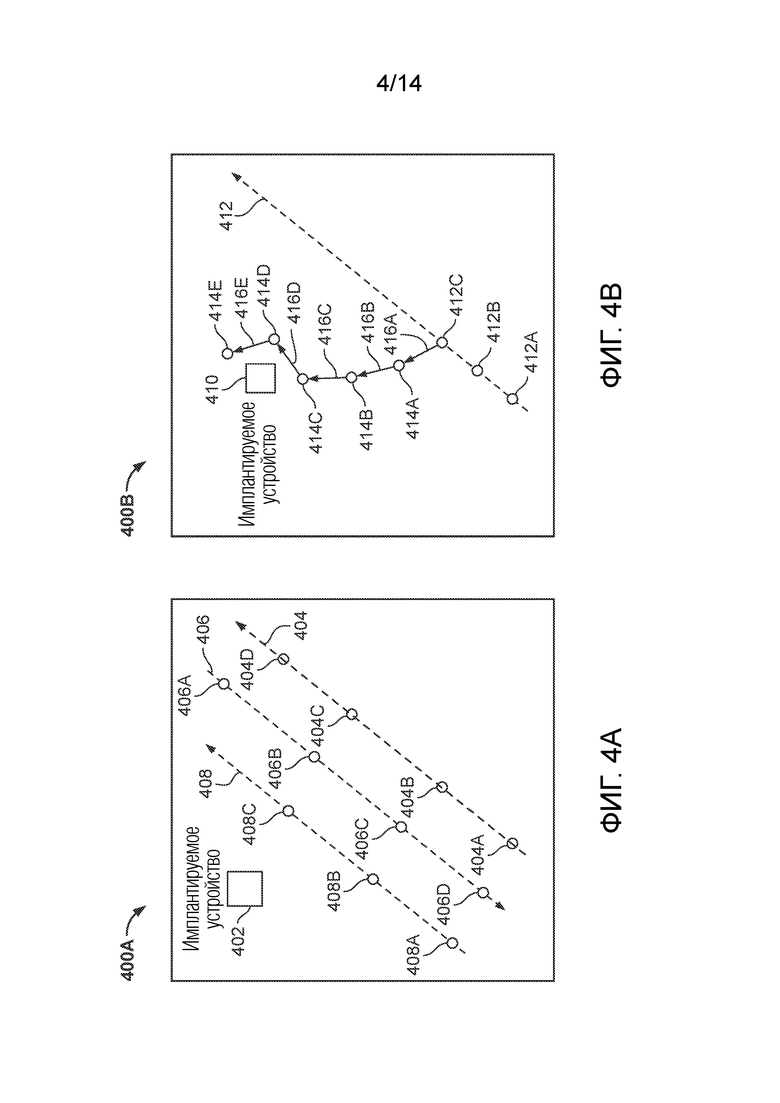
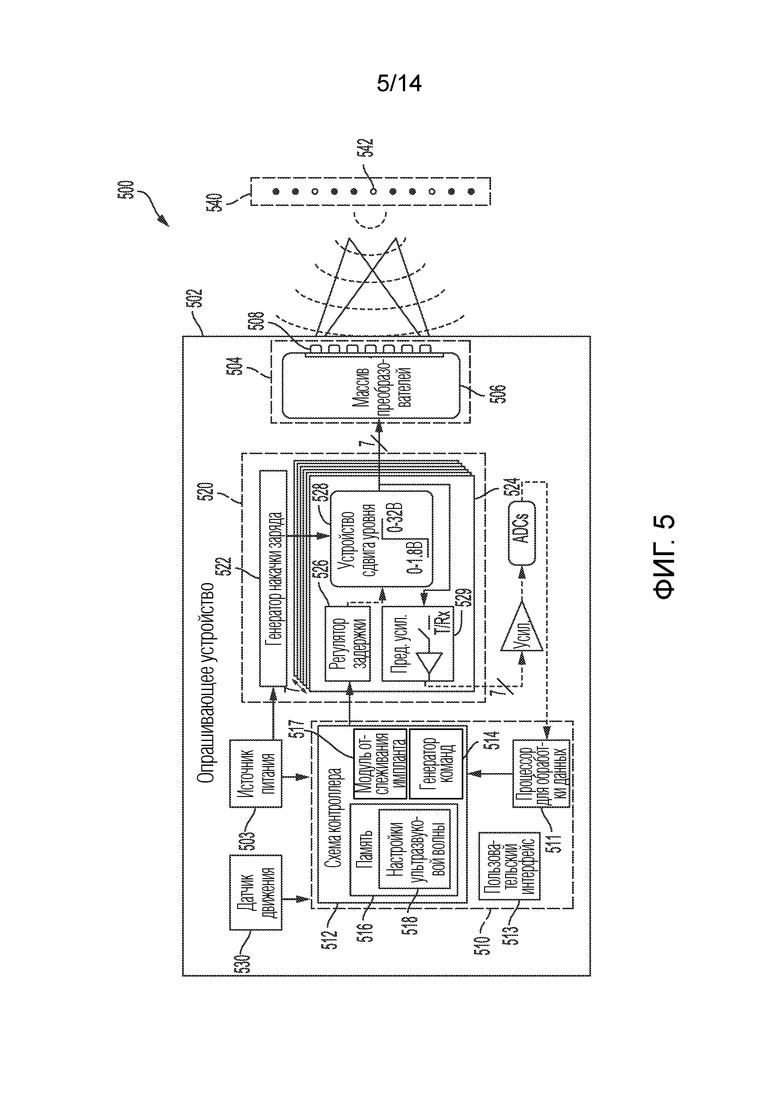
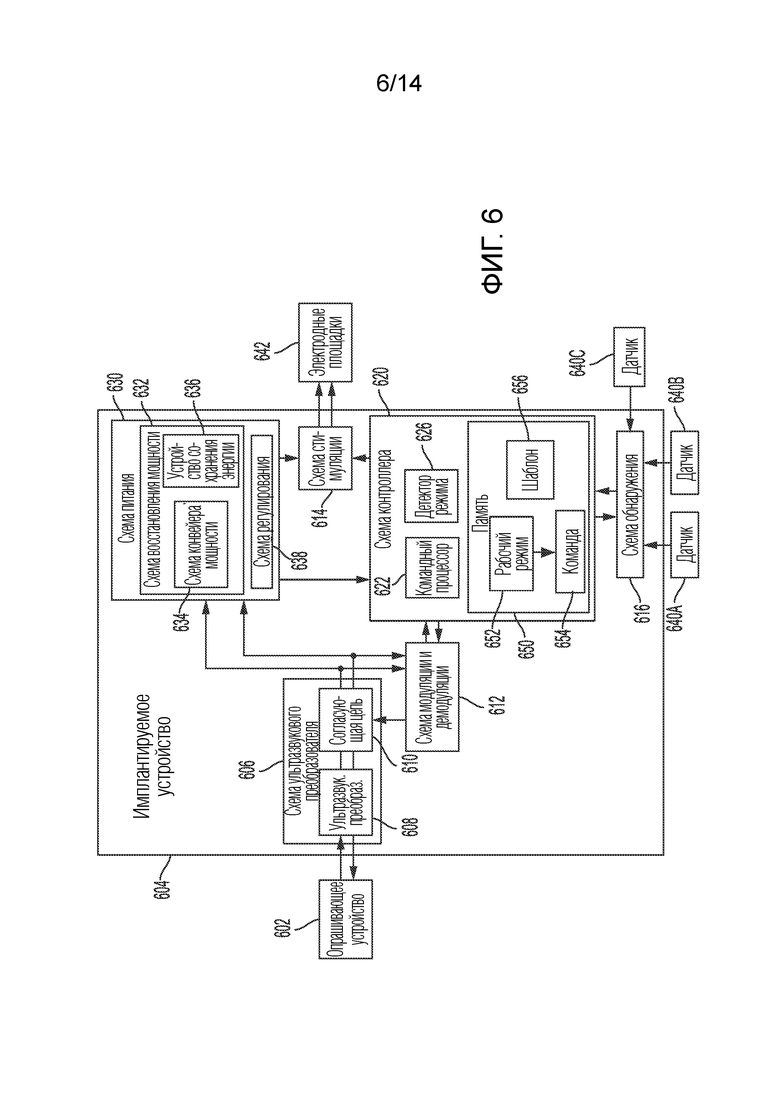
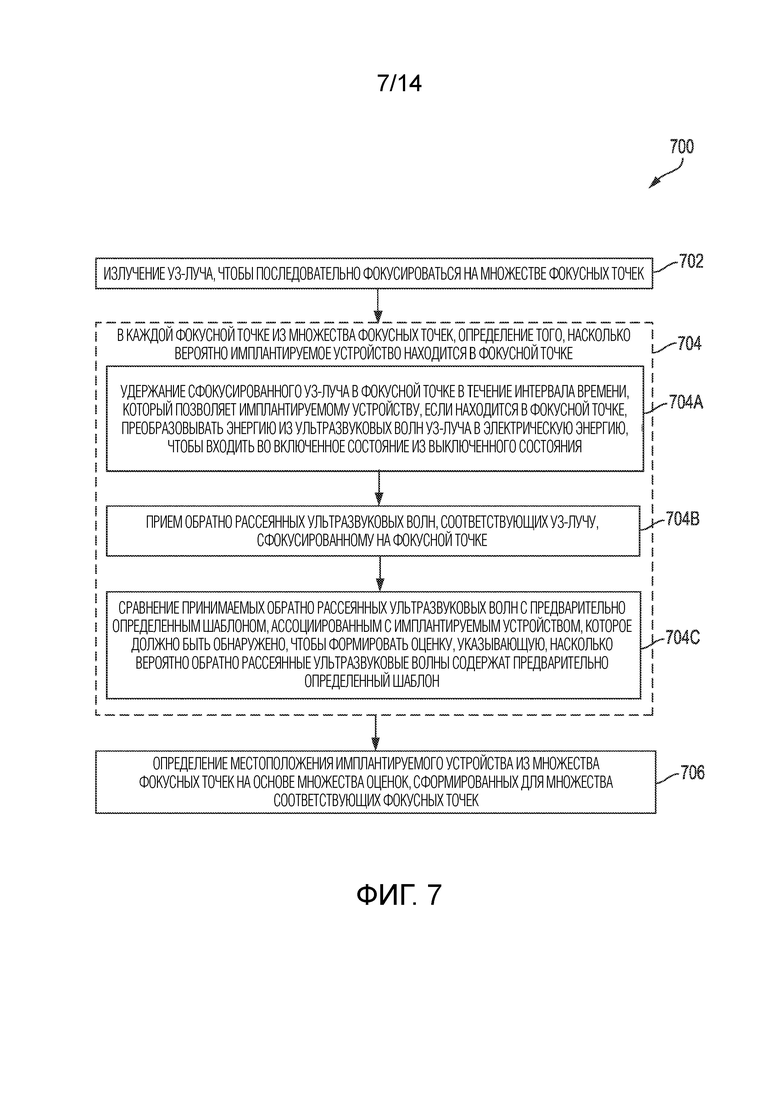
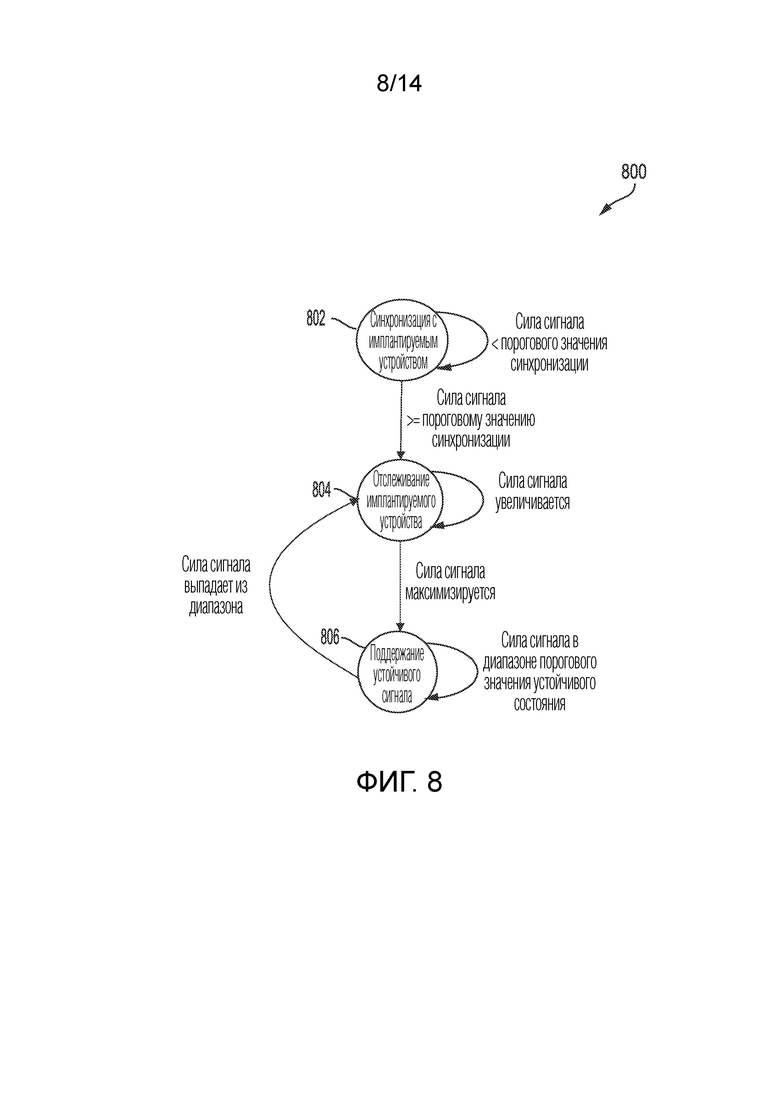
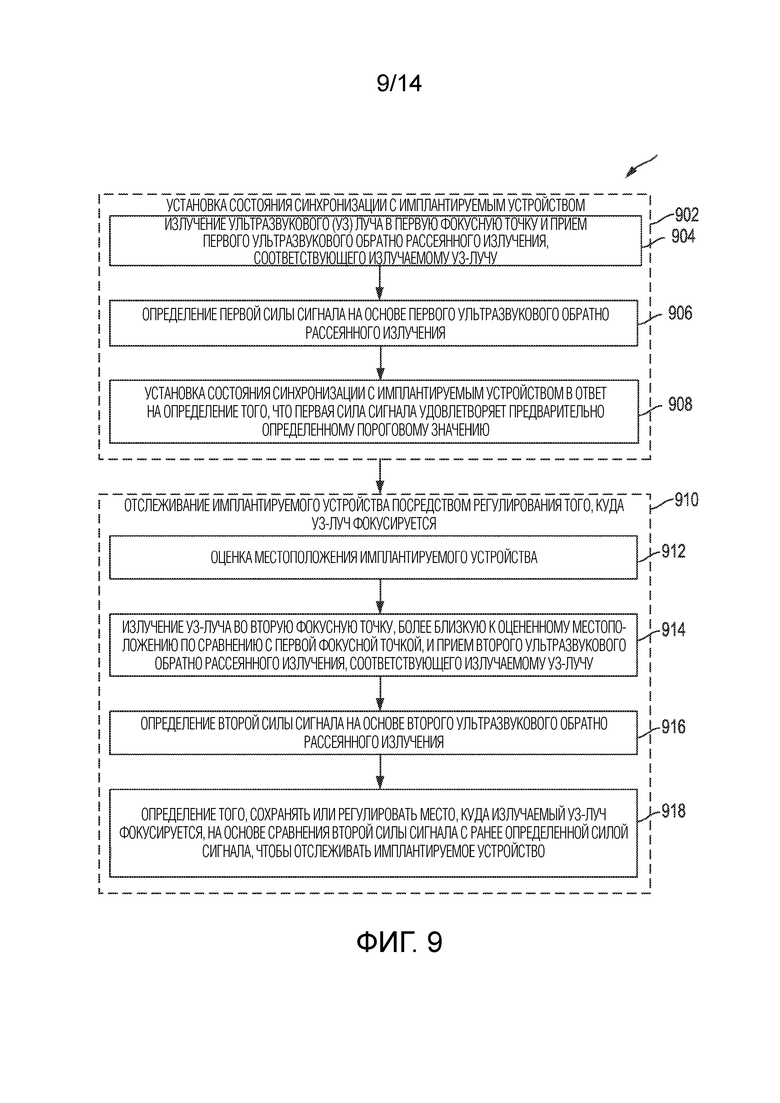
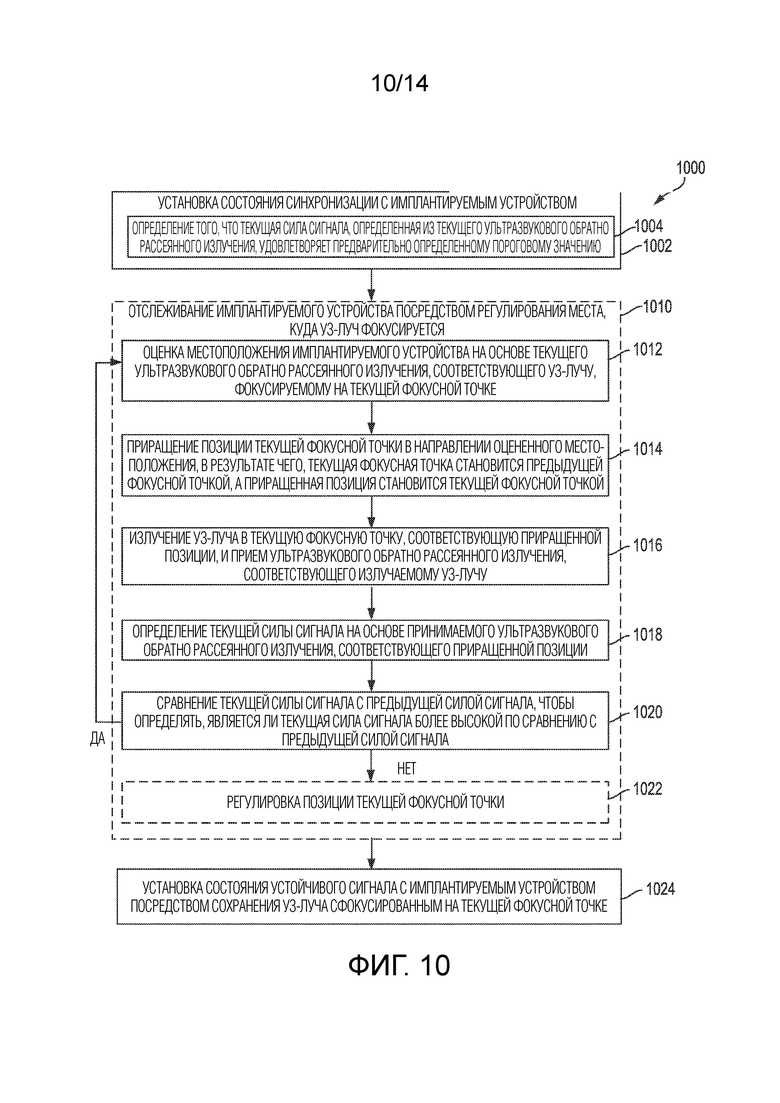
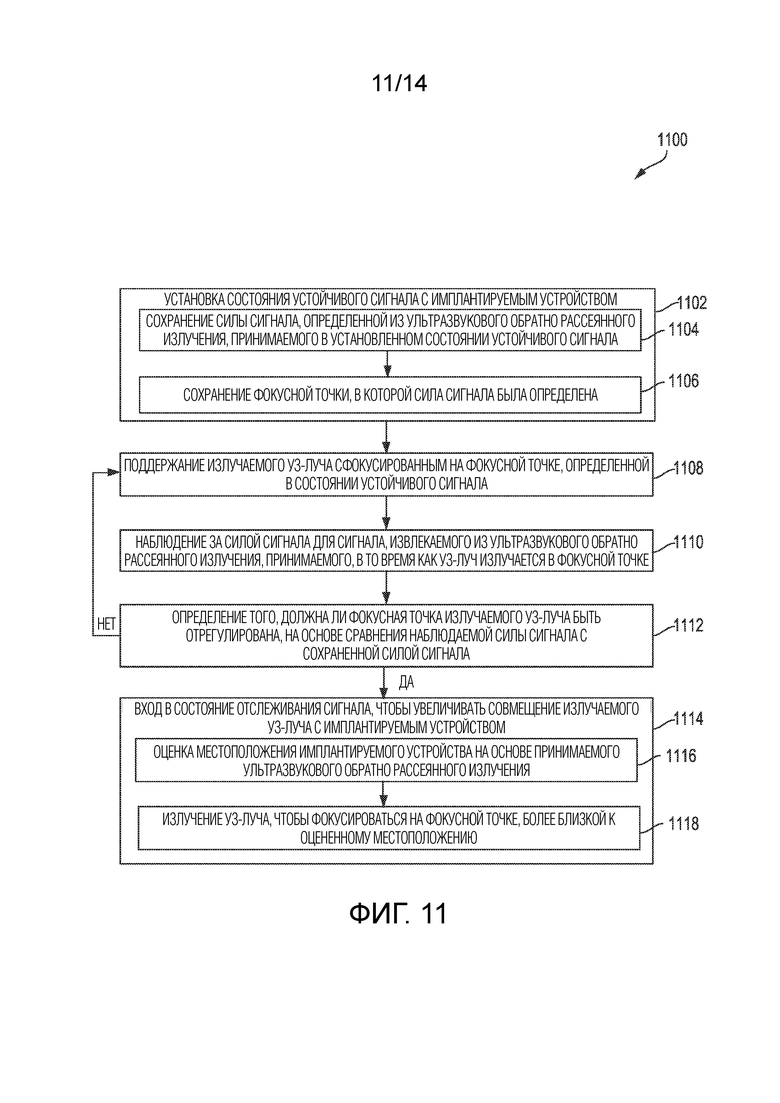
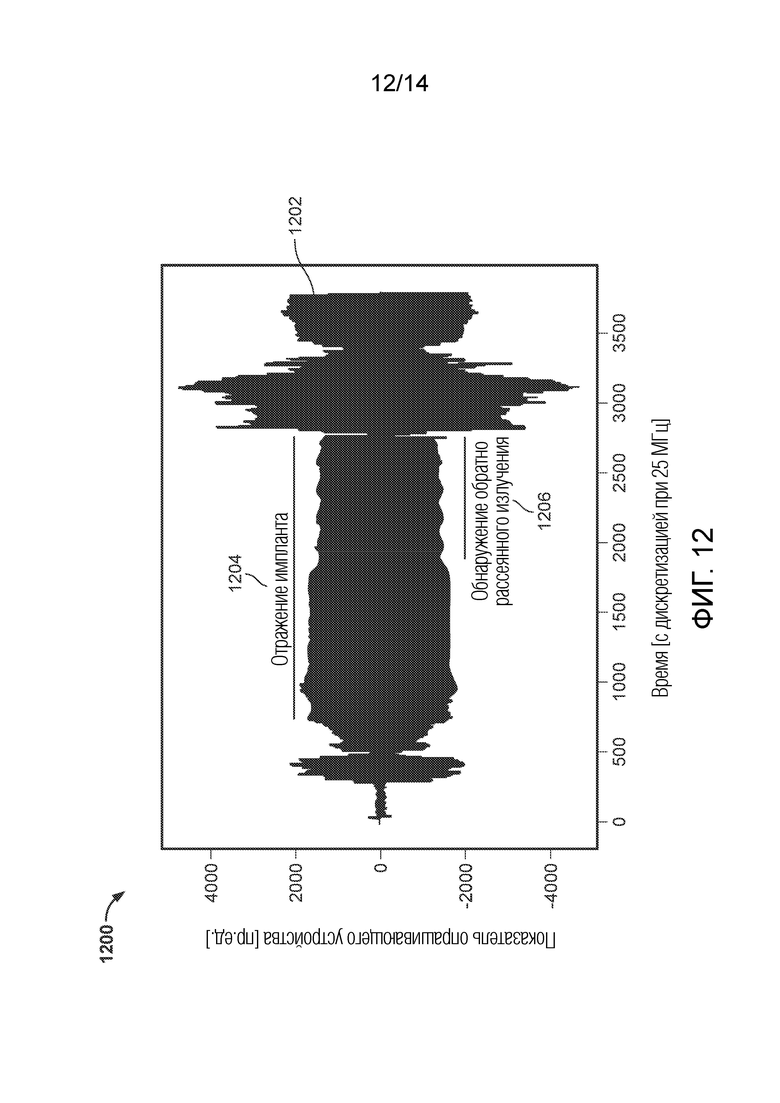
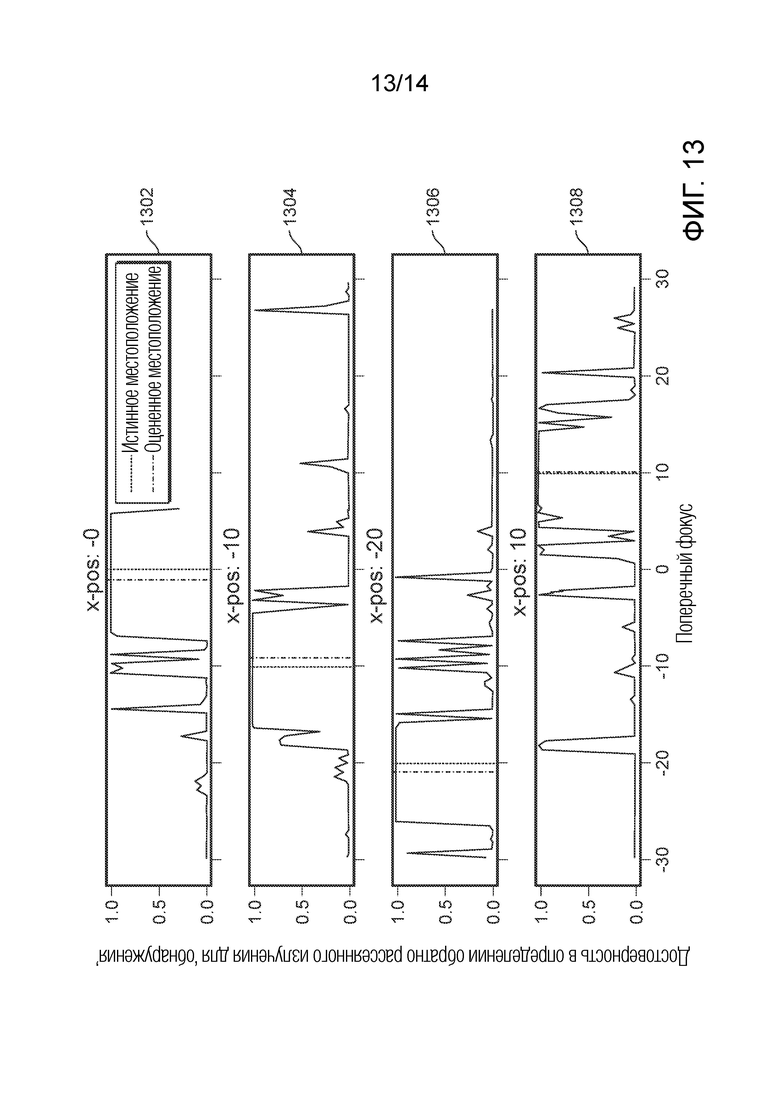
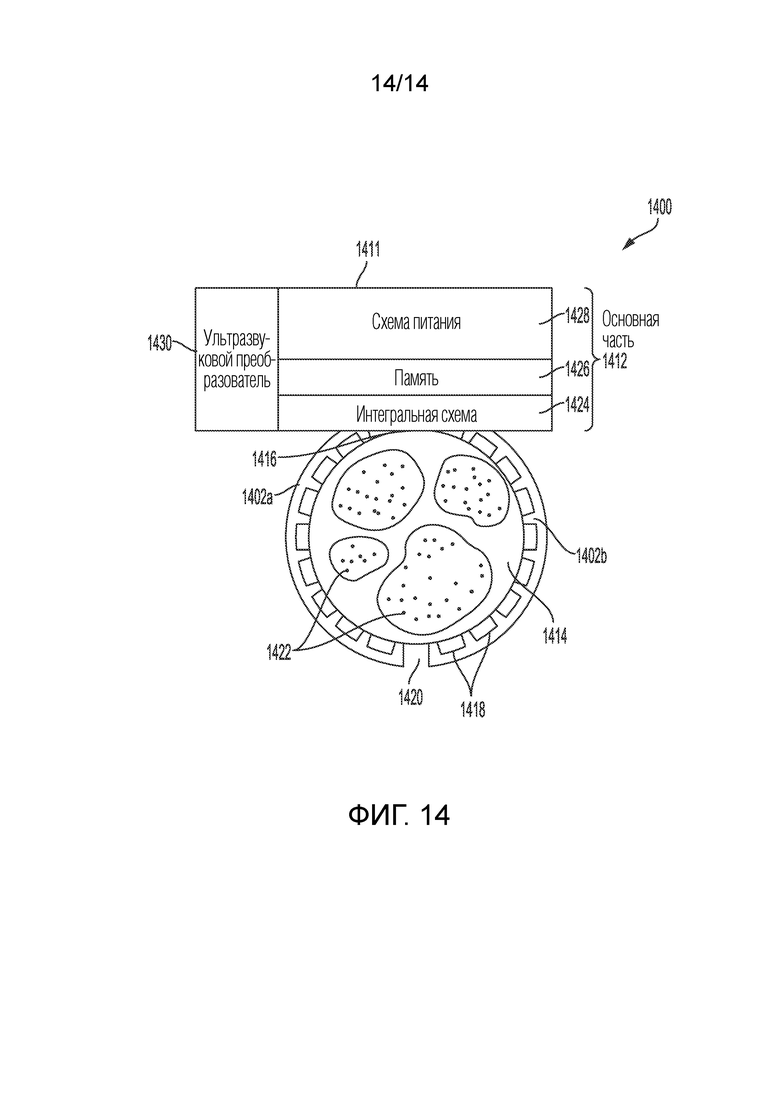
Изобретение относится к отслеживанию имплантируемого устройства, использующего ультразвуковые волны для доставки ему мощности. Технический результат заключается в обеспечении отслеживания имплантируемого устройства, питаемого энергией с помощью ультразвуковых волн. Осуществляют установление состояния синхронизации с имплантируемым устройством, оценку его местоположения и определение того, сохранять или регулировать место, куда ультразвуковой луч фокусируется, на основе силы ультразвукового сигнала. Обнаружение имплантируемого устройства включает излучение ультразвукового луча, чтобы последовательно фокусироваться на множестве фокусных точек, прием ультразвукового обратно рассеянного излучения, соответствующего ультразвуковому лучу, сфокусированному на фокусной точке, и сравнение принимаемого ультразвукового обратно рассеянного излучения с предварительно определенным шаблоном, ассоциированным с имплантируемым устройством, которое должно быть обнаружено, чтобы формировать оценку, указывающую, насколько вероятно ультразвуковое обратно рассеянное излучение содержит предварительно определенный шаблон; и определение местоположения имплантируемого устройства на основе оценок. 2 н. и 18 з.п. ф-лы, 15 ил.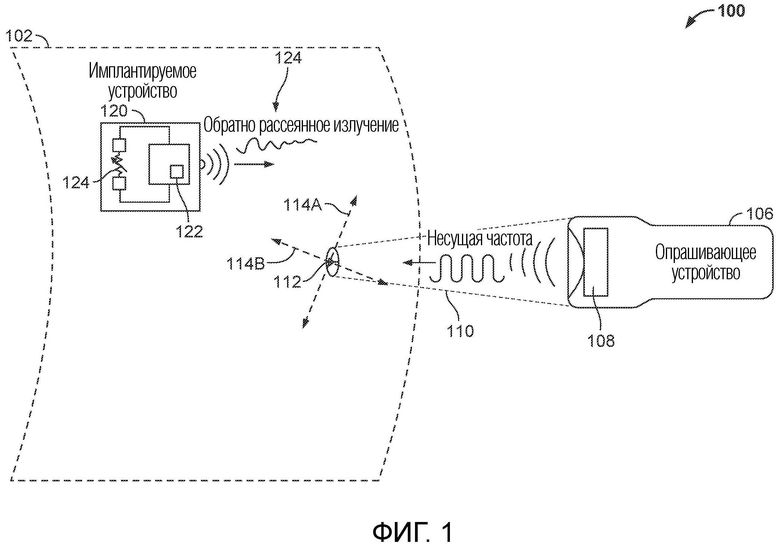
1. Способ для отслеживания имплантируемого устройства, питаемого энергией с помощью ультразвуковых волн, чтобы поддерживать мощность, подаваемую к имплантируемому устройству, содержащий этапы, на которых:
устанавливают состояние синхронизации с имплантируемым устройством, содержащее этапы, на которых:
излучают ультразвуковой луч в первую фокусную точку и принимают первое ультразвуковое обратно рассеянное излучение, соответствующее излучаемому ультразвуковому лучу;
определяют первую силу сигнала на основе первого ультразвукового обратно рассеянного излучения; и
устанавливают состояние синхронизации с имплантируемым устройством в ответ на определение того, что первая сила сигнала равна или выше предварительно определенного порогового значения;
оценивают местоположение имплантируемого устройства;
излучают ультразвуковой луч во вторую фокусную точку, более близкую к оцененному местоположению по сравнению с первой фокусной точкой, и принимают второе ультразвуковое обратно рассеянное излучение, соответствующее излучаемому ультразвуковому лучу;
определяют вторую силу сигнала на основе второго ультразвукового обратно рассеянного излучения; и
определяют, сохранять или регулировать место, куда излучаемый ультразвуковой луч фокусируется, на основе сравнения определенной второй силы сигнала с первой силой сигнала.
2. Способ по п. 1, при этом установка состояния синхронизации содержит этап, на котором управляют ультразвуковым лучом, чтобы последовательно фокусироваться на множестве фокусных точек в области исследования, чтобы определять первую фокусную точку, в которой первая сила сигнала удовлетворяет предварительно определенному пороговому значению.
3. Способ по п. 2, при этом управление ультразвуковым лучом содержит этап, на котором направляют ультразвуковой луч в первом направлении, чтобы последовательно фокусироваться на множестве фокусных точек до тех пор, пока первая сила сигнала, определенная из первого ультразвукового обратно рассеянного излучения, определяется выше предварительно определенного порогового значения.
4. Способ по любому одному из пп. 1-3, содержащий, в ответ на определение необходимости сохранять определенную фокусную точку ультразвукового луча во второй фокусной точке, этапы, на которых:
сохраняют ультразвуковой луч сфокусированным на определенной второй фокусной точке, и
наблюдают за силой сигнала, определяемой из ультразвукового обратно рассеянного излучения, принимаемого, в то время как ультразвуковой луч фокусируется на определенной второй фокусной точке.
5. Способ по п. 4, при этом наблюдаемая сила сигнала соответствует модулированному сигналу, сформированному имплантируемым устройством, чтобы кодировать информацию в ультразвуковом обратно рассеянном излучении, принимаемом в опрашивающем устройстве.
6. Способ по п. 5, при этом закодированная информация, уникально идентифицирует имплантируемое устройство.
7. Способ по любому одному из пп. 1-3, содержащий, в ответ на определение необходимости регулировать вторую фокусную точку ультразвукового луча, этапы, на которых итеративно оценивают местоположение имплантируемого устройства на основе принимаемого ультразвукового обратно рассеянного излучения и обновляют фокусную точку ультразвукового луча в направлении оцененного местоположения, пока сила сигнала, определяемая из ультразвукового обратно рассеянного излучения, принимаемого для обновленной фокусной точки, больше не будет увеличиваться.
8. Способ по любому одному из пп. 1-7, при этом определение первой силы сигнала на основе первого ультразвукового обратно рассеянного излучения содержит этапы, на которых:
извлекают, из первого ультразвукового обратно рассеянного излучения, сигнал импланта, ассоциированный с имплантируемым устройством; и
определяют первую силу сигнала на основе извлеченного сигнала импланта.
9. Способ по п. 8, при этом извлечение сигнала импланта содержит этап, на котором подавляют помехи сигнала из обратно рассеянных ультразвуковых волн, чтобы извлекать сигнал импланта.
10. Способ по п. 9, содержащий этап, на котором идентифицируют имплантируемое устройство, отслеживаемое на основе извлеченного сигнала импланта.
11. Способ по любому одному из пп. 1-10, при этом первое ультразвуковое обратно рассеянное излучение содержит первый фрагмент, который включает в себя сигнал импланта, закодированный имплантируемым устройством в первое ультразвуковое обратно рассеянное излучение, и второй фрагмент, который не включает в себя сигнал импланта.
12. Способ по п. 11, содержащий этап, на котором определяют первую силу сигнала для сигнала импланта на основе сравнения первого фрагмента и второго фрагмента первого ультразвукового обратно рассеянного излучения.
13. Способ по любому одному из пп. 1-12, при этом местоположение имплантируемого устройства оценивается после установления состояния синхронизации.
14. Способ по любому одному из пп. 1-13, при этом местоположение имплантируемого устройства оценивается на основе формирования луча для приема.
15. Способ по любому одному из пп. 1-14, содержащий определение фокусной точки, ассоциированной с локальной максимальной силой сигнала, содержащее, итеративно, этапы, на которых:
оценивают местоположение имплантируемого устройства;
направляют ультразвуковой луч из текущей фокусной точки в испытываемую фокусную точку на основе направления оцененного местоположения имплантируемого устройства относительно текущей фокусной точки, при этом текущая фокусная точка становится предыдущей фокусной точкой;
определяют силу сигнала на основе ультразвукового обратно рассеянного излучения, когда ультразвуковой луч излучается в испытываемую фокусную точку; и
сравнивают силу сигнала, когда ультразвуковой луч излучается в испытываемую фокусную точку, с силой сигнала, когда ультразвуковой луч излучается в предыдущую фокусную точку.
16. Способ по п. 15, содержащий, в ответ на определение фокусной точки, ассоциированной с локальным максимумом, этап, на котором устанавливают устойчивый режим с имплантируемым устройством, при этом, если сила сигнала снижается ниже второго предварительно определенного порогового значения, фокусная точка, ассоциированная с локальным максимальным сигналом, повторно определяется.
17. Способ по любому одному из пп. 1-16, при этом определение того, сохранять ли место, куда излучаемый ультразвуковой луч фокусируется, содержит этапы, на которых:
наблюдают за перемещением опрашивающего устройства; и
определяют регулировку в фокусную точку ультразвукового луча на основе наблюдаемого перемещения.
18. Способ по любому одному из пп. 1-17, при этом способ для отслеживания имплантируемого устройства выполняется в опрашивающем устройстве.
19. Способ по любому одному из пп. 1-18, в котором ультразвуковой луч имеет размер пятна менее 10 мм.
20. Система для отслеживания имплантируемого устройства, питаемого с помощью ультразвуковых волн, содержащая:
массив преобразователей, содержащий множество преобразователей; и
контроллер, сконфигурированный, чтобы:
устанавливать состояние синхронизации с имплантируемым устройством, содержащее:
управление массивом преобразователей, чтобы излучать ультразвуковой луч в первую фокусную точку и принимать первое ультразвуковое обратно рассеянное излучение, соответствующее излучаемому ультразвуковому лучу;
определять первую силу сигнала на основе первого ультразвукового обратно рассеянного излучения; и
устанавливать состояние синхронизации с имплантируемым устройством в ответ на определение того, что первая сила сигнала равна или выше предварительно определенного порогового значения;
оценивать местоположение имплантируемого устройства;
управлять массивом преобразователей, чтобы излучать ультразвуковой луч во вторую фокусную точку, более близкую к оцененному местоположению по сравнению с первой фокусной точкой, и принимать второе ультразвуковое обратно рассеянное излучение, соответствующее излучаемому ультразвуковому лучу;
определять вторую силу сигнала на основе второго ультразвукового обратно рассеянного излучения; и
определять то, сохранять или регулировать то, куда излучаемый ультразвуковой луч фокусируется, на основе сравнения определенной второй силы сигнала с первой силой сигнала.
| US 20190199139 A1, 27.06.2019 | |||
| US 20100041988 A1, 18.02.2010 | |||
| CA 3120296 A1, 09.07.2020 | |||
| US 20200253588 A1, 13.08.2020 | |||
| US 20180085605 A1, 29.03.2018 | |||
| УЛЬТРАЗВУКОВОЙ ВОЛНОВОД | 2007 |
|
RU2455084C2 |
| RU 2018138151 A, 30.04.2020. | |||

