ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к медицине, более конкретно к способу и устройству для транскраниальной ультразвуковой диагностики.
УРОВЕНЬ ТЕХНИКИ
Существующие методы ультразвукового (далее - УЗ) транскраниального обследования сосудов и структур мозга сегодня осуществляются только через так называемые «окна акустической прозрачности», т.е. такие места черепа, кости которых не оказывают существенного влияния на звуковое поле. Типичный пример - височная кость. Малая площадь височной кости и ее анатомическое расположение не позволяют врачу получить качественные изображения сосудов головного мозга, и в частности, изображение Велизиева круга, не говоря уже об изображениях мозговой ткани. Для получения детальных УЗ изображений структур мозга УЗ датчики надо устанавливать на черепе в местах, которые для врача являются наиболее информативными, однако этому препятствуют специфические анатомические и акустические свойства «толстых» черепных костей. Основными являются следующие:
a) Высокое поглощение УЗ в ткани кости;
b) Произвольный профиль нижней границы кости;
c) Двумерная кривизна черепных костей.
Высокое поглощение УЗ в костной ткани (Фиг. 1) приводит к резкому ослаблению уровней отраженных эхо-сигналов от структур мозга, и поскольку поглощение зависит от частоты УЗ почти квадратично (наиболее плохой случай), то возможный частотный диапазон УЗ является ограниченным. В практических случаях максимально возможные частоты УЗ составляют не выше 2,5 МГц, а разрешающая способность (качество УЗ изображения) существенно зависит от величины используемой частоты УЗ.
Произвольный профиль нижней границы кости (см. Фиг. 1) приводит к непредсказуемым деформациям волновых фронтов излучаемого сигнала и приемных сигналов. В западной литературе такие искажения часто называют аберрациями.
В результате УЗ изображения либо сильно расфокусированы, либо их вообще невозможно получить.
Двумерная кривизна черепных костей может вызывать непредсказуемую рефракцию акустических волн, приводящую к искажениям изображений и их местоположения. Используя оптические аналогии, черепную кость можно уподобить некоторому темному кривому и неоднородному по толщине стеклу, через которое надо получить оптическое изображение.
Известен способ для получения ультразвуковых изображений структур и сосудов головного мозга, а также устройство для осуществления такого способа (патент РФ №2232547, 20.07.2004), который основан на использовании, по меньшей мере, одного, приемоизлучающего ультразвукового (УЗ) датчика и заключается в том, что осуществляют предварительную калибровку, при которой под каждым упомянутым по меньшей мере одним УЗ-датчиком измеряют параметры кости, формируют с помощью упомянутого по меньшей мере одного УЗ-датчика сфокусированного диаграмму направленности излучения для облучения заданной области пространства по глубине с использованием параметров кости, измеренных на этапе предварительной калибровки, излучают в заданную область пространства по глубине сложный зондирующий сигнал, формируют сфокусированную диаграмму направленности приема упомянутого по меньшей мере одного УЗ-датчика в заданной области пространства по глубине с использованием параметров кости, измеренных на этапе предварительной калибровки, причем область фокусировки диаграммы направленности приема совпадает с областью фокусировки диаграммы направленности излучения упомянутого по меньшей мере одного УЗ-датчика, принимают упомянутым по меньшей мере одним УЗ-датчиком из облучаемой заданной области пространства отраженные сигналы, осуществляют взаимно-корреляционную обработку принятых отраженных сигналов, формируют изображение точки исследуемого объекта для заданной области пространства, осуществляют синхронное сканирование сфокусированными диаграммами направленности излучения и приема упомянутого по меньшей мере одного УЗ-датчика в угле сканирования и диапазоне дальностей, определяемых заданной областью пространства, с формированием полного изображения исследуемого объекта.
Недостатком известного решения является невысокая точность измерения параметров кости, особенно ее нижней границы, тем самым снижая точность и детализацию получаемых данных при проведении транскраниальных УЗ исследований.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленного изобретения является создание нового способа и реализующего его устройства для проведения транскраниальных УЗ исследований, обеспечивающих получение точных и детализированных данных.
Техническим результатом является повышение точности получаемых данных при проведении транскраниальных УЗ исследований.
Заявленный технический результат достигается за счет способа получения ультразвуковых изображений структур мозга через толстые кости черепа, использующий принципы эхо-локации с помощью, по меньшей мере, одного или нескольких многоэлементных одномерных и/или двумерных УЗ датчиков, работающих либо в режиме совмещенного приема-излучения, либо в режиме разнесенного приема-излучения, установленных на голове пациента, с возможностью их механического перемещения, причем каждый из упомянутых многоэлементных УЗ датчиков в передающем режиме излучает короткие импульсы в виде сферической волны с изменяющимся фокусным расстоянием в заданном секторе обзора, которые принимаются элементами этого УЗ датчика от, по меньшей мере, одного рассеивателя, расположенного на выбранном фокусном расстоянии, и по принятым эхо-сигналам восстанавливается изображение упомянутого, по меньшей мере, одного рассеивателя путем преобразования Фурье-Френеля.
В одном из частных вариантов, при осуществлении заявленного способа, по принятым отраженным сигналам оценивается форма принятого волнового фронта ψ(1)(x,y) от рассеивателя, расположенного в мозговой ткани по нормали к приемному УЗ датчику, которая далее аппроксимируется N произвольными кусочно-линейными сегментами волновых фронтов, образованными группами элементов приемного УЗ датчика, причем число элементов в каждой группе может быть произвольным.
В одном из частных вариантов, при осуществлении заявленного способа, при восстановлении изображения по заданному аппроксимированному волновому фронту для всех участков Nk, принадлежащих N, оценивается вид функции точечного источника путем преобразования Фурье-Френеля от принятых эхо-сигналов с элементов приемного УЗ датчика при изменении фаз сигналов в каждом участке аппроксимации от 0 до 2π; причем запоминаются только те фазы в группах приемных элементах, которые приводят к возрастанию амплитуды рассеивателя и уменьшению его ширины по пространственным координатам x, y, в результате чего формируется вторая оценка волнового фронта ψ(2)(x,y). Осуществляют сравнение полученных функций ψ(1)(x,y) и ψ(2)(x,y) по критерию δψ=⎪ψ(1)(x,y)-ψ(2)(x,y⎪≤ε=min, где величина ε - заданная величина погрешности, причем если погрешность ε значительно отличается от заданной, то повторяют определение ψ(1)(x,y) до тех пор, пока погрешность ε не станет минимально возможной.
В одном из частных вариантов, при осуществлении заявленного способа, по сформированной функции ψ(2)(x,y) рассчитываются корректирующие фазовые множители во всех элементах приемного УЗ датчика для всех возможных углов сканирования α и β и для восстановления УЗ изображения используются преобразования типа Фурье-Френеля с учетом полученных корректирующих фазовых множителей.
Заявленный технический результат достигается также с помощью устройства для УЗ транскраниального сканирования, которое представляет собой шлемовидную конструкцию, содержащую корпус с, по меньшей мере, двумя дугообразными направляющими, расположенными в верхней части шлемовидной конструкции и выполненными с возможностью их перемещения, причем на упомянутых направляющих установлены:
- многоэлементный одномерный или двумерный УЗ датчик, выполненный с возможностью излучения в заданном секторе углов коротких импульсов с, заданной формой волнового фронта в виде сферической волны с переменным фокусным расстоянием по нормали к УЗ датчику, которые принимаются элементами этого УЗ датчика от, по меньшей мере, одного рассеивателя, расположенного на заданном фокусном расстоянии, и выполненный с возможностью механического перемещения по направляющей;
- по меньшей мере, один излучатель;
и датчики позиционирования,
причем упомянутый многоэлементный УЗ датчик располагается на фиксированном расстоянии L от излучателя, а датчики позиционирования выполнены с возможностью измерения углов поворота и положений УЗ датчика и, по меньшей мере, одного излучающего датчика.
Входящий в состав устройства для УЗ транскраниального сканирования многоэлементный УЗ датчик выполнен обратимым и состоит из N*M отдельных пьезоэлементов, работающих, как в режиме приема, так и в режиме излучения.
В частном варианте осуществления заявленного устройства перемещение направляющих осуществляется с помощью элементов управления поворотом направляющих.
В частном варианте осуществления, заявленное устройство дополнительно содержит болюс, выполненный из акустически прозрачного материала, располагаемый между УЗ датчиком и головой пациента.
В частном варианте осуществления заявленного устройства, в его состав включен, по меньшей мере, один дополнительный многоэлементный УЗ одномерный или двумерный датчик.
В частном варианте осуществления заявленного устройства при наличии дополнительного УЗ датчика, основной датчик осуществляет работу в режиме совмещенного приема-излучения или разнесенного приема-излучения.
В частном варианте осуществления заявленного устройства основной и, по меньшей мере, один дополнительный УЗ датчики располагаются на одной направляющей или на разных направляющих.
Заявленный технический результат достигается также с помощью системы для УЗ визуализации структур мозга через толстые кости черепа, которая содержит:
- устройство для УЗ сканирования;
- блоки предварительных усилителей (БПУ), каждый из которых содержит множество приемных каналов, АЦП и ПЛИС (Программируемая логическая интегральная схема);
- многоканальный усилитель мощности (МУМ), содержащий ЦАП;
- и ЭВМ, содержащую, по меньшей мере, один процессор, интерфейсы ввода/вывода и средство памяти, связанную с помощью интерфейса цифровой обработки сигналов (ЦОС-интерфейс) с БПУ и МУМ;
причем в памяти упомянутой ЭВМ содержатся машиночитаемые команды, которые при их обработке, по меньшей мере, одним процессором, позволяют с помощью упомянутого устройство для УЗ сканирования излучать короткие импульсы с заданной формой волнового фронта в виде сферической волны с заданным фокусным расстоянием по нормали к УЗ датчику, осуществлять обработку импульсов, принимаемых элементами УЗ датчика от, по меньшей мере, одного рассеивателя, расположенного на упомянутом фокусном расстоянии, и по принятым эхо-сигналам восстанавливать изображение упомянутого, по меньшей мере, одного рассеивателя с помощью преобразования Фурье-Френеля.
В частных вариантах реализации заявленного изобретения, с помощью заявленной в составе системы ЭВМ выполняет установка исходных параметров сигналов - зондирующего импульса U(t), а именно его длительность Т, период следования Т9 и амплитуду U0, причем упомянутые параметры передаются в ПЛИС БПУ для последующего генерирования и запоминания излучаемых сигналы U(t), параметры которых соответствуют заданным искомым дальностям ( глубинам) сканирования для всех углов обзора α и θ, дискретности по дальности Δr и дискретность по углам Δα и Δθ, которые описывают сходящиеся сферические волны в однородной среде от УЗ датчика. Отраженные эхо-сигналы через УЗ датчик устройства УЗ сканирования передаются на входы БПУ для последующей обработки ПЛИС.
Также с помощью ЭВМ, в частности с помощью, по меньшей мере, одного процессора вычисляется форма принятого волнового фронта по эхо-сигналам, которая аппроксимируется N линейными сегментами. Для каждого сегмента Nk, объединяющего некоторое число элементов УЗ датчика, последовательно изменяется фаза сигналов от 0 до 2π, значение которой передается в ПЛИС, ЦАПы и соответствующие элементы УЗ датчика, которые осуществляют излучение полученных сигналов с измененной фазой. По принятым эхо-сигналам для каждого значения измененной фазы в каждом сегменте осуществляется восстановление изображения и фазы сигналов, для которых качество изображения улучшилось, запоминаются.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
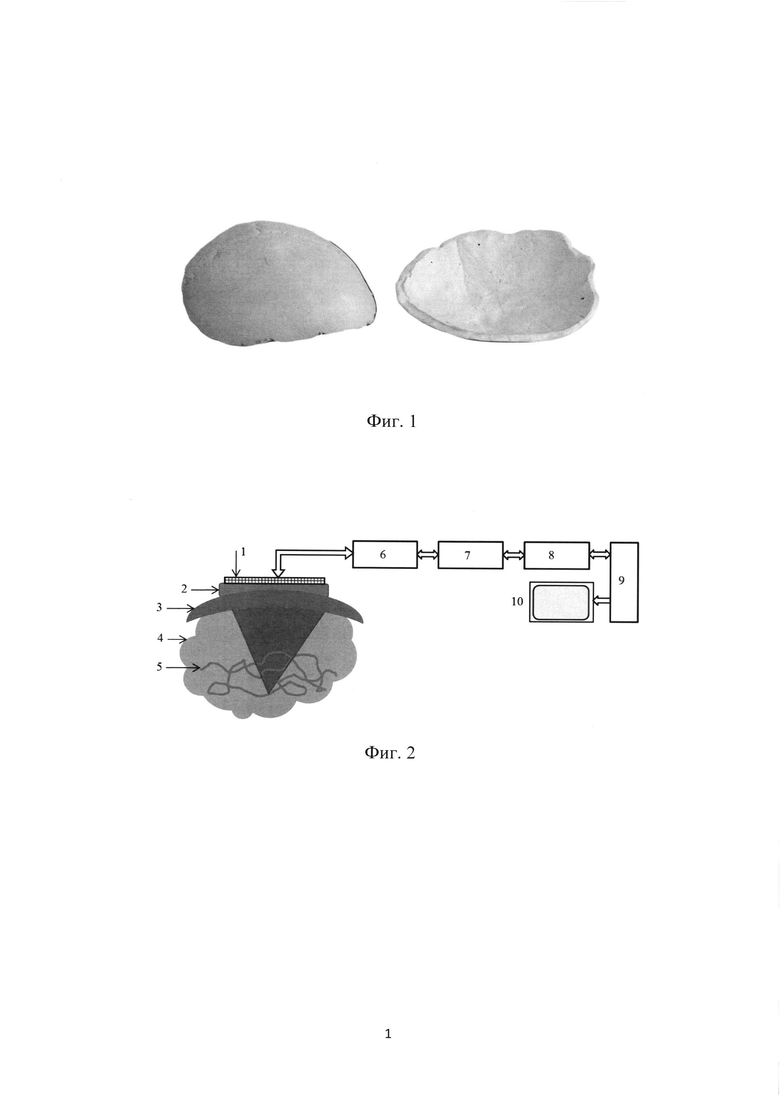
Фиг. 1 иллюстрирует фрагмент черепной кости (свод черепа).
Фиг. 2 иллюстрирует обобщенный вид схемы УЗ транскраниальной диагностики.
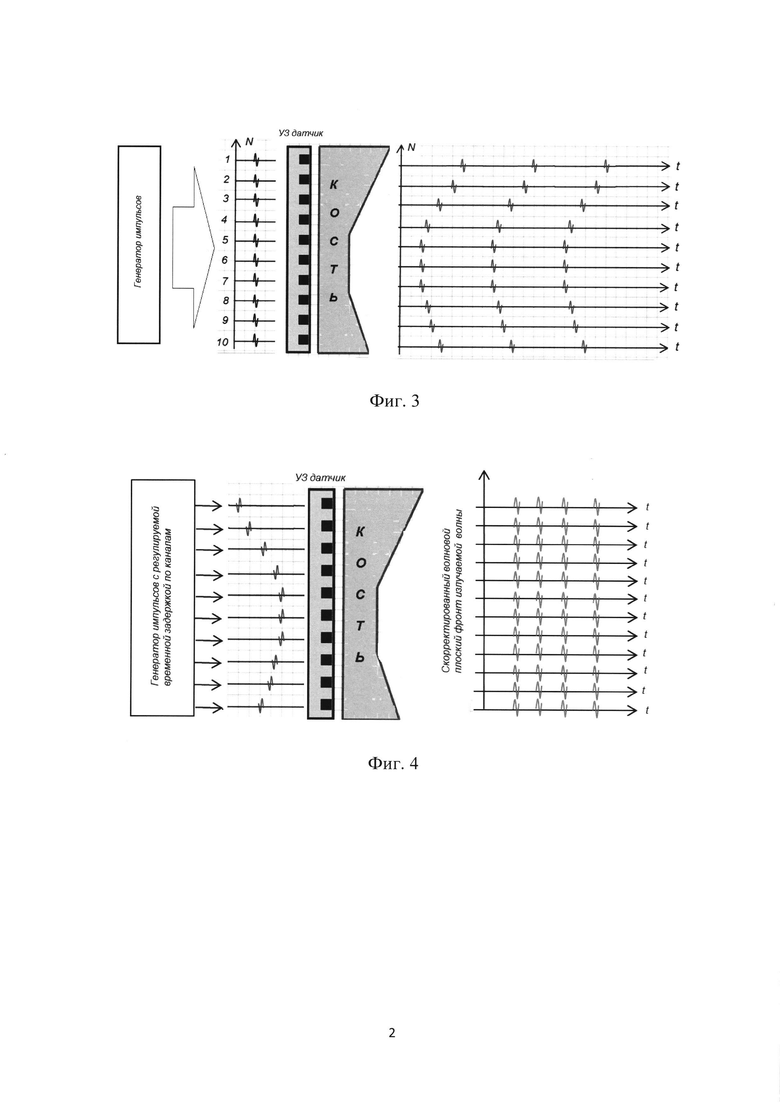
Фиг. 3 иллюстрирует форму волнового фронта излучаемых импульсов от УЗ датчика после прохождения через кость.
Фиг. 4 иллюстрирует компенсацию (коррекцию) волнового фронта излучаемого сигнала с УЗ датчика.
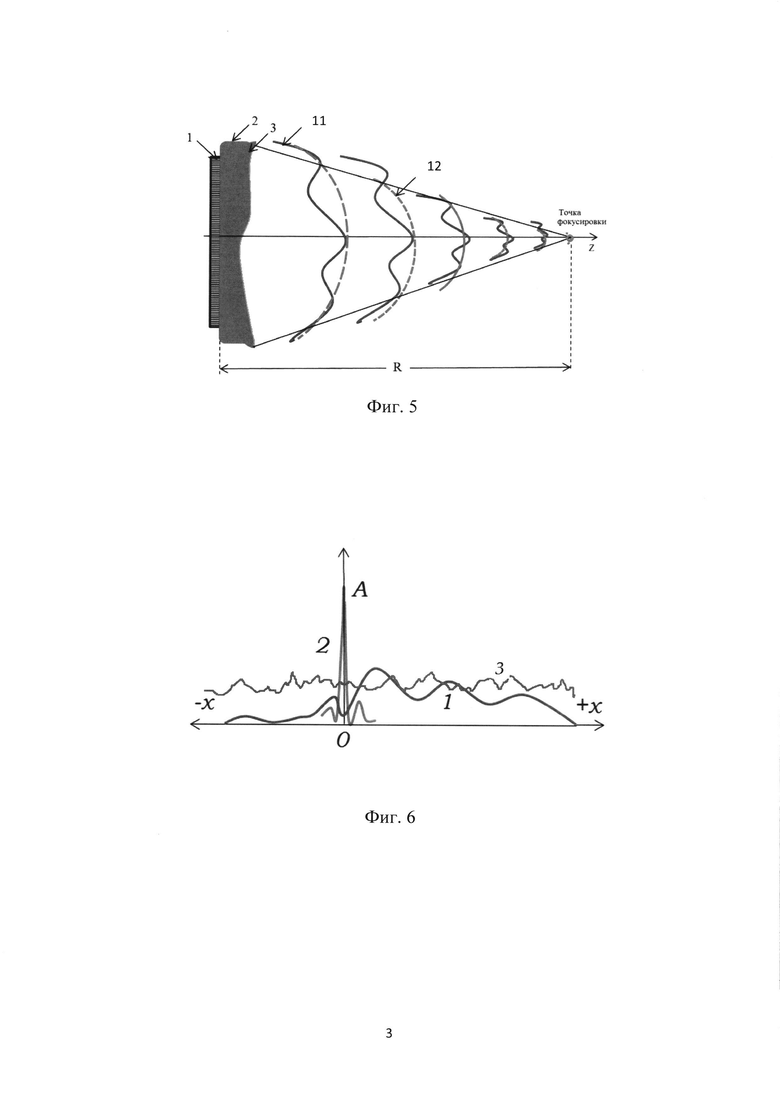
Фиг. 5 иллюстрирует волновой фронт излученной волны.
Фиг. 6 иллюстрирует идеальный импульсный отклик точечного рассеивателя.
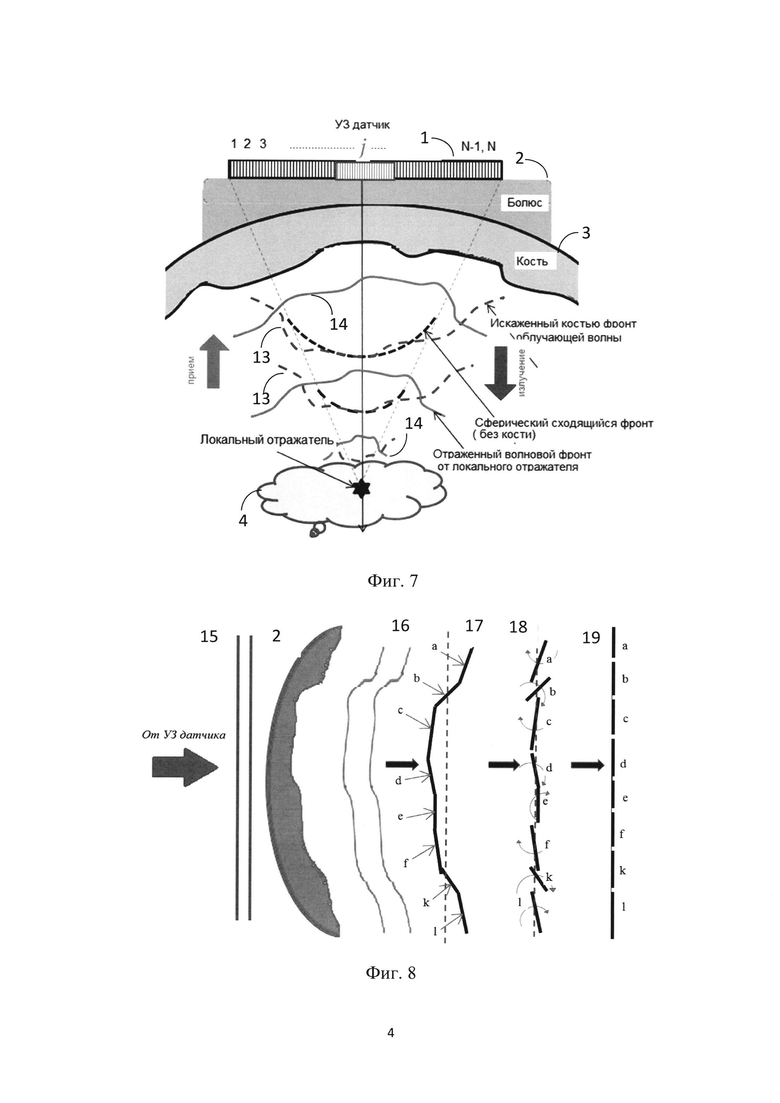
Фиг. 7 иллюстрирует общий принцип заявленного способа УЗ диагностики.
Фиг. 8 иллюстрирует процедуру стохастической адаптивной аппроксимации.
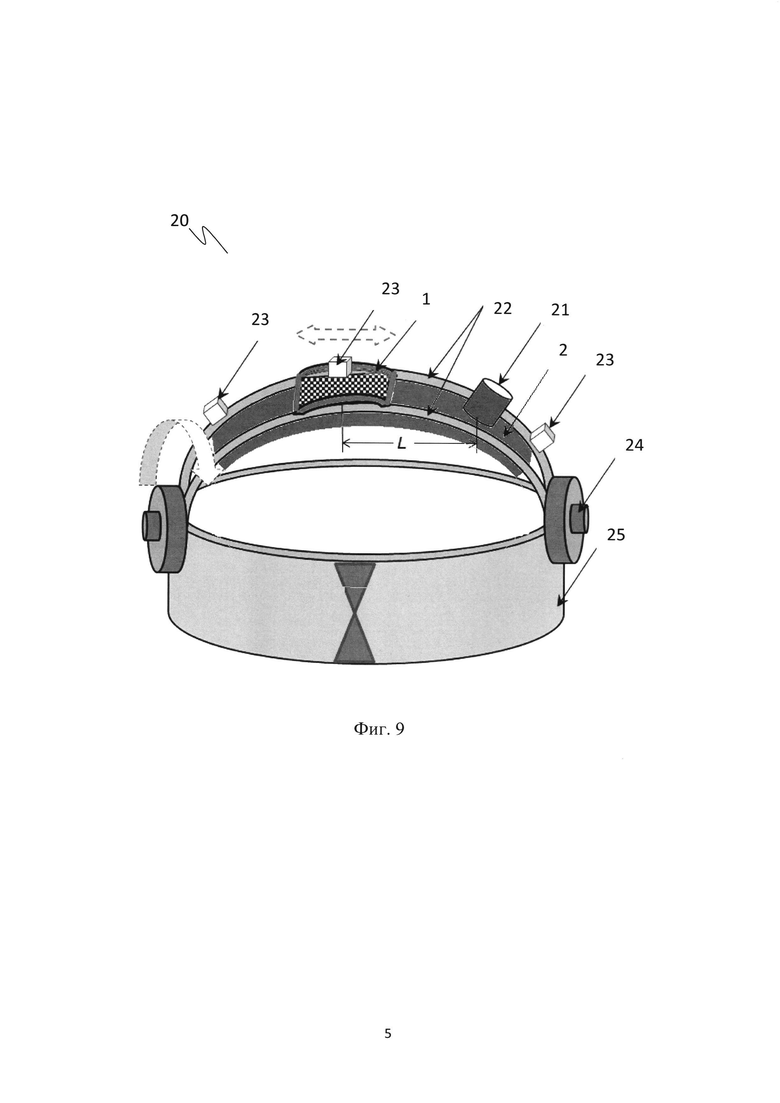
Фиг. 9 иллюстрирует конструкцию устройства для осуществления УЗ сканирования.
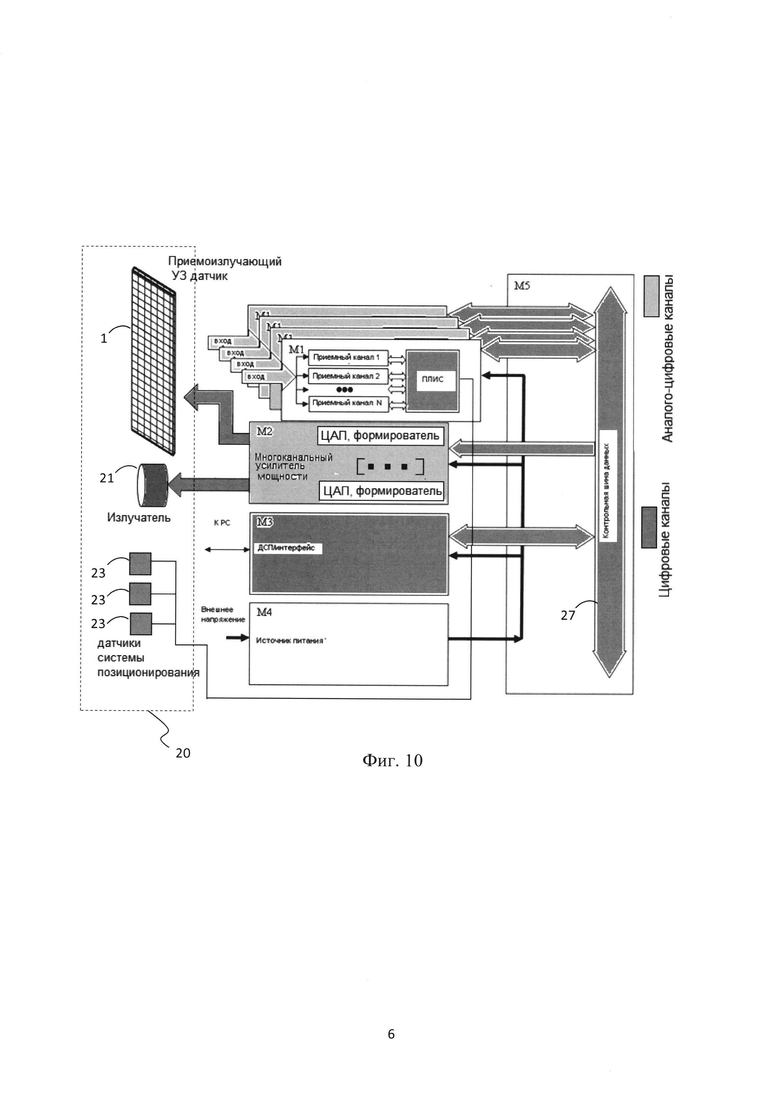
Фиг. 10 иллюстрирует общий вид системы излучения, приема и обработки сигналов при осуществлении УЗ диагностики.
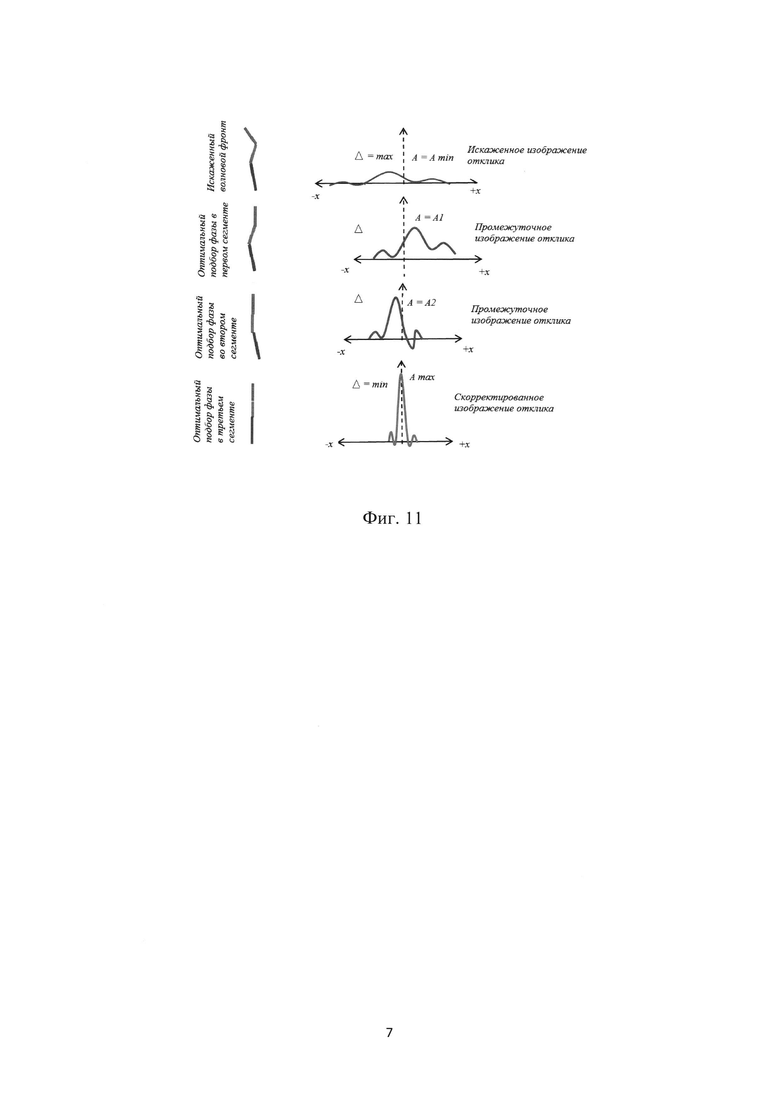
Фиг. 11 иллюстрирует диаграмму итеративной процедуры подбора фаз в элементах УЗ датчика.
Фиг. 12 иллюстрирует пример итерационной стохастической аппроксимации фаз.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
С физико-математической точки зрения рассматриваемая задача относится к классу обратных задач восстановления изображений через неоднородные акустические (оптические) среды. Теоретическое решение этой задачи основано на том, что, зная (измеряя) параметры кости (комплексную передаточную функцию), можно ввести коррекцию волнового фронта (фронтов) и получить неискаженное изображение. Иначе говоря, прежде чем получить акустическое изображение рассматриваемого участка, необходимо измерить:
- двумерный профиль нижней границы кости в месте установки УЗ датчика;
- локальные толщины;
- коэффициенты передачи.
Необходимо помнить, что в УЗ хирургии мозга двумерный профиль кости предлагается получать методами рентгеновской компьютерной томографии (КТ) или с помощью магнитно-резонансной томографии (МРТ), поскольку пациент находится в стационаре. Однако для оперативной УЗ диагностики такие методы не приемлемы, поскольку если используются методы КТ или МРТ, то УЗ диагностика просто не нужна. Поэтому для получения информации о параметрах кости используются те же УЗ методы эхо-локации. Для измерения профиля кости используются эхо-локационные методы Локальную толщину кости можно определить по времени прихода отраженного импульсного сигнала от нижней границы, измерив время задержки между излученным и отраженным сигналами. Однако для этого необходимо знать скорость звука в костной ткани, которая априорно не известна, что представляет суть проблемы, поскольку мы имеем одно уравнение с двумя неизвестными:
где Δh - локальная толщина кости, Т - длительность излучаемого сигнала, Cbone - скорость звука в кости.
Заметим, что с такой же проблемой приходится сталкиваться и в УЗ дефектоскопии, когда для измерения толщины стенки, например, трубы, необходимо знать скорость звука в материале, из которого она сделана. Для ее решения во многих работах предлагаются различные методы, в частности с использованием двух разнесенных антенных решеток, применением излучающих решеток с переменным фокусом и др. Недостатком всех этих методов является их невысокая точность и высокая трудоемкость получения данных со всех элементов УЗ решетки, которая должна быть двумерной. Приведем несколько численных примеров, чтобы оценить возможности таких методов УЗ эхо-импульсной толщинометрии (см. Таблицу 1).
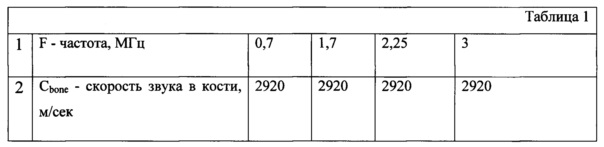
Необходимо точно знать разрешающую способность относительно толщины кости. Ошибка в измерении толщины кости приведет к ошибкам измерения фазового волнового фронта сигнала, и, следовательно, к дефокусировке изображения. Из антенной техники известно, что допустимые разбросы фаз между отдельными элементами антенны (не зависимо от причин таких разбросов) должны быть не более δh≤λ/4-λ/8.
Из Таблицы 1 следует, что частоты сигналов для получения УЗ изображений и измерения толщины костей черепа должны быть различными. Для получения УЗ изображений структур мозга следует использовать частотный диапазон от 1,7 МГц до 2,25 МГц, а для измерения толщины и профиля кости частота должна быть порядка 3 МГц и выше, поскольку только в этом случае можно обеспечить требуемую точность измерений. Если, например, считать, что средняя толщина черепной кости составляет около 8 мм, то среднюю погрешность измерения толщины можно оценить величиной:
 , что для многих практических случаев является приемлемой точностью. Использовать частоты выше 3 МГц для УЗ визуализации практически невозможно из-за высокого затухания, и из-за относительно малого коэффициента обратного рассеяния мозговой ткани, который составляет не более 10%. Например, на частоте 2,25 МГц поглощение в кости составляет порядка 19 дБ/см. В эхолокационном режиме суммарное поглощение в кости составит (-38) дБ/см. Другими словами, для кости с толщиной 10 мм сигнал из-за костной ткани будет ослаблен в 90 раз, а суммарное ослабление сигнала за счет малой величины обратного рассеяния реальный уровень составит примерно (-60) дБ, т.е. в тысячу раз по давлению.
, что для многих практических случаев является приемлемой точностью. Использовать частоты выше 3 МГц для УЗ визуализации практически невозможно из-за высокого затухания, и из-за относительно малого коэффициента обратного рассеяния мозговой ткани, который составляет не более 10%. Например, на частоте 2,25 МГц поглощение в кости составляет порядка 19 дБ/см. В эхолокационном режиме суммарное поглощение в кости составит (-38) дБ/см. Другими словами, для кости с толщиной 10 мм сигнал из-за костной ткани будет ослаблен в 90 раз, а суммарное ослабление сигнала за счет малой величины обратного рассеяния реальный уровень составит примерно (-60) дБ, т.е. в тысячу раз по давлению.
Функционально предложенный принцип УЗ транскраниальной диагностики через толстые кости черепа можно представить в виде схемы, изображенной на Фиг. 2. Общая схема предполагает использование, по меньшей мере, одного одномерного или двумерного УЗ датчика (1), который через согласующий слой (2), контактирующий с черепной костью (3), осуществляет передачу сигналов в мозговую ткань (4). Полученные отраженные сигналы датчик (1) передает в блок приема-передатчика с оцифровкой принятых сигналов (6), связанный с микропроцессором (7), и по интерфейсу связи (8) с компьютером (9) для последующей визуализации с помощью стандартных средств отображения информации, например, на дисплее (10).
Сначала производится измерение параметров кости в месте установки многоэлементного датчика (1). Компьютер генерирует короткий излучающий импульсный сигнал S0(t) с заданными параметрами, который подается на все элементы УЗ датчика. Далее каждый i-й элемент УЗ датчика принимает отраженные сигналы Si(t), по которым вычисляются времена прихода первых отраженных импульсов от нижней границы кости и соответствующие времена задержек τi, по которым при известной скорости звука Cbone в кости определяются локальные толщины кости, Δhi, определяющие одномерный профиль кости (для линейного датчика. Одновременно измеряются амплитуды отраженных сигналов ai. Для двумерного датчика таким же образом определяется форма нижней поверхности кости, h(xi, yj), которая запоминается в оперативной памяти компьютера (10) в виде матрицы комплексных коэффициентов  По полученной матрице
По полученной матрице  далее вычисляются корректирующие фазовые коэффициенты для каждого элемента УЗ датчика (1) в режиме приема и в режиме излучения для всех возможных углов сканирования (α,β) и расстояний просмотра R(k). То есть для каждого элемента сектора обзора (αi, βj, Rk) формируются матрицы коэффициентов возбуждения элементов УЗ датчика в режиме излучения и режиме приема,
далее вычисляются корректирующие фазовые коэффициенты для каждого элемента УЗ датчика (1) в режиме приема и в режиме излучения для всех возможных углов сканирования (α,β) и расстояний просмотра R(k). То есть для каждого элемента сектора обзора (αi, βj, Rk) формируются матрицы коэффициентов возбуждения элементов УЗ датчика в режиме излучения и режиме приема,  и,
и,  соответственно.
соответственно.
Рассмотрим более детально, как происходит процесс корректировки, если форма нижней границы кости измерена. Для простоты рассмотрим генерирование плоской волны, при которой все элементы УЗ датчика возбуждаются синфазно. Пройдя участок кости, импульсы от отдельных элементов датчика будут задержаны на некоторое время из-за различных локальных толшин: раньше всех придут импульсы, где толщина кости наименьшая и наоборот. В результате плоский фронт волны приобретет случайную форму, в пределе повторяющую профиль нижней границы кости (см. Фиг. 3) и ничего общего с плоской формой волнового фронта не имеющую.
Поскольку локальные толщины кости известны, то можно рассчитать времена задержек сигналов на отдельных элементах УЗ решетки, они очевидно будут обратными исходным временам и с этими временами задержек излучать сигналы. Таким образом, задержки, вызванные разными локальными толщинами кости будут скомпенсированы и на выходе УЗ датчика будет сформирован требуемый плоский волновой фронт (см. Фиг. 4).
В реальных УЗ устройствах размеры УЗ датчика соизмеримы с максимальной глубиной просмотра, поэтому, как правило, излучается не плоская, а сферическая волна. Но общий принцип корректировки волнового фронта остается прежним: при излучении на элементы УЗ датчика подаются исходные импульсные сигналы с фазами и амплитудами, определяемые матрицей коэффициентов возбуждения, что приводит к тому, что после прохождения через неоднородную кость формируется неискаженная сферическая волна под заданными углами сканирования и заданными глубинами просмотра (αi, βj, Rk). На Фиг. 5 показан результат такой фазовой корректировки волнового фронта в режиме излучения, где под позицией (11) показана форма излученного сферического волнового фронта без коррекции, а под позицией (12) форма излученного волнового фронта с учетом корректирующей матрицы ||Кизл||.
Как было показано в предыдущих разделах, основная проблема заключается в методах измерения геометрических и акустических параметров костной ткани, расположенной под УЗ датчиком, и практически во всех известных решениях предварительно осуществляются такие измерения - предварительная калибровка кости, а затем осуществляется согласованная фильтрация, минимизирующая искажения и расфокусировку.
Возникает вопрос: а можно ли осуществлять УЗ транскраниальную диагностику, не измеряя параметры костной ткани, поскольку она требует использования довольно сложных вычислительных процедур и в принципе применения более высокой частоты УЗ, чем для визуализации. Далее будет раскрыт такой способ. С физической точки зрения он основан на двух основных положениях.
Первое положение заключается в том, что нижняя граница кости имеет плавные неровности, т.е. их пространственный масштаб больше или много больше длин УЗ волн, используемых для визуализации. Для диапазона частот 1,7-2,25 МГц длины волн составляют 1,7-1,3 мм, а масштабы неровностей нижней границы черепных костей в среднем в разы и десятки раз больше. Такое соотношение приводит к тому, что излучаемая форма волнового фронта, хотя и является искаженной, но в среднем она сохраняет свою сферическую сходимость.
Второе положение заключается в том, что при освещении какой-либо структуры головного мозга, от нее всегда возникнет отраженное поле, восстановление которого на какой-то дальности создаст локальное изображение не диффузного типа. Иными словами, это изображение не будет являться идеальным изображением точечного источника типа SinX/X, но оно будет локализовано в пространстве координат приемной плоскости, и возможно, состоять из нескольких несимметричных максимумов. Иными словами, оно будет иметь вид искаженной функции идеального точечного источника SinX/X, но не иметь вид равномерного диффузного фона как при мелкомасштабном рассеянии УЗ. На Фиг. 6 показан пример идеального импульсного отклика точечного рассеивателя (кривая 2), тот же отклик при плавных неровностях нижней границы черепной кости (кривая 1), отклик при мелкомасштабном рассеянии УЗ (кривая 3).
Заявленный способ ультразвуковой визуализации структур мозга через толстые кости черепа заключается в следующем.
Заявленный способ получения ультразвуковых изображений структур мозга через толстые кости черепа использует принципы эхо-локации с помощью совмещенных или разнесенных многоэлементных одномерных или двумерных УЗ датчиков (1), устанавливаемых на голове пациента с возможностью их механического перемещения при сканировании. Многоэлементный УЗ датчик (1) излучает короткие импульсы с заданной формой волнового фронта в виде сферической волны с заданным фокусным расстоянием по нормали к УЗ датчику, которые принимаются элементами этого УЗ датчика (1) от, по меньшей мере, одного рассеивателя, расположенного на упомянутом фокусном расстоянии, и по принятым эхо-сигналам восстанавливается изображение упомянутого, по меньшей мере, одного рассеивателя путем преобразования Фурье-Френеля. По принятым отраженным сигналам оценивается форма принятого волнового фронта ψ(1)(x,y) от рассеивателя, расположенного в мозговой ткани (4) по нормали к приемному УЗ датчику, которая далее аппроксимируется N произвольными кусочно-линейными сегментами волновых фронтов, образованными группами элементов приемного УЗ датчика, причем число элементов в каждой группе может быть произвольным. При восстановлении изображения по заданному аппроксимированному волновому фронту для всех участков Nk, принадлежащих N, оценивается вид функции точечного источника путем преобразования Фурье-Френеля от принятых эхо-сигналов с элементов приемного УЗ датчика (1) при изменении фаз сигналов в каждом участке аппроксимации от 0 до 2π; причем запоминаются только те фазы в группах приемных элементах, которые приводят к возрастанию амплитуды рассеивателя и уменьшению его ширины по пространственным координатам x, y, в результате чего формируется вторая оценка волнового фронта ψ(2)(x, y). Осуществляют сравнение полученных функций ψ(1)(x,y) и ψ(2)(x, y) по критерию δψ=⎪ψ(1)(x,y)-ψ(2)(x, y⎪≤ε=min, где величина ε - заданная величина погрешности, причем если погрешность ε значительно отличается от заданной, то повторяют определение ψ(1)(x,y) до тех пор, пока погрешность ε не станет минимально возможной. Причем по сформированной функции ψ(2)(x, y) рассчитываются корректирующие фазовые множители во всех элементах приемного УЗ датчика (1) для всех возможных углов сканирования α и β, и для восстановления УЗ изображения используются преобразования типа Фурье-Френеля с учетом полученных корректирующих фазовых множителей.
В режиме излучения на элементы УЗ датчика подаются импульсные сигналы, параметры которых соответствуют заданным искомым дальностям (глубинам) сканирования r(α,θ) для всех углов обзора α и θ, дискретности по дальности Δr и дискретность по углам Δα и Δθ, которые описывают сходящиеся сферические волны в однородной среде от УЗ датчика. Эти сферические сходящиеся волны излучаются УЗ датчиком, которые снова претерпевают искажения, пройдя через неоднородный костный слой, и попадают на элементы УЗ датчика. В качестве рассеивателей понимается любая структура в мозговой ткани, которая отражает или рассеивает падающую УЗ волну. Это может быть мозговая ткань, стенка кровеносного сосуда, какое-либо уплотнение и так далее. Структура рассеивателя может быть такова, что он либо рассеивает звук в разные стороны, либо работает как некое подобие зеркального отражателя, например стенка сосуда, как более плотная ткань создает отражение звука в достаточно узком секторе углов, а мозговая ткань чаще всего ведет себя как диффузный рассеиватель, т.е. осуществляет отражение сигнала в более широком секторе углов.
Предлагаемый способ обработки, который можно назвать способом стохастической аппроксимации с обратной связью, представлен в общем виде на Фиг. 7. Для простоты рассмотрим одномерный случай. Для какой-то выбранной дистанции и направления (в данном случае - это траверз датчика) сформируем для этого расстояния сферическую сходящуюся волну и излучим ее. При отсутствии неровной нижней границы это был бы сходящийся сферический фронт (черные пунктирные дуги на Фиг. 7). Наличие плавных неровностей приводит к геометрическим искажениям этого фронта (13), но он остается в среднем сходящимся. На выбранной дальности расположен локальный рассеиватель, который переотражает эти волны (14); этот фронт (13) вторично искажается неоднородным слоем, и принятые сигналы с этой дистанции попадают на приемные элементы УЗ датчика (1). Далее итерационная процедура стохастической аппроксимации заключается в следующем. Разобьем все N приемников УЗ датчика (1) на несколько групп, объединив их, например, по 4. Таким образом, вместо N приемников у нас будет N*=N/4. Пусть таких групп будет М. Например, было N=128, а стало М=32. Возьмем, например, центральную группу, на Фиг. 7 она обозначена как "J".
Далее, оставляя все исходные параметры излучения прежними, восстановим изображение этого локального рассеивателя стандартной обработкой типа преобразования Френеля. При этом мы получим некоторое изображение, которое будет иметь вид, показанный на Фиг. 6. (кривая 1), а в отсутствие искажений мы должны получить изображение точечного источника с заданным аппаратным разрешением (кривая 2). Полученное изображение может не находиться в центре, иметь несколько максимумов и его уровень будет всегда меньше, чем уровень идеального аппаратного отклика.
Теперь необходимо последовательно изменять фазу сигнала ϕj на "J-й группе от 0 до +/-2π с заданной дискретностью по фазе Δϕ и для каждого значения  будем осуществлять процедуру восстановления изображения точечного источника. Если при каком-либо значении фазы
будем осуществлять процедуру восстановления изображения точечного источника. Если при каком-либо значении фазы  амплитуда отраженного сигнала в точке «0» возросла, то это значение фазы запоминается, и такая же процедура повторяется для следующей группы элементов. В результате изменения и подбора фаз во всех 32 группах мы получим восстановленное изображение источника, близкого к расчетному. Другими словами, используя метод стохастической аппроксимации, мы согласуем волновой фронт в режиме приема с передаточной функцией кости без вычисления ее параметров. Заметим, что изменение фаз от 0 до +/-2π осуществляется для всех групп одновременно. На Фиг. 8 схематически представлена процедура стохастической аппроксимации на примере плоской волны. При данной процедуре сгенерированная УЗ датчиком (1) плоская волна (15), проходя через кость (2), образует искаженные волновые фронты (16). Затем происходит разбиение фронта на группы (17) плоских волн и приведение волн к одному фазовому центру (компенсация времен задержек), подбор фазы в каждой группе (18) и объединение групп и восстановленный исходный волновой фронт плоской волны (19). Еще раз отметим, что при каждом изменении фазы в группе осуществляется восстановление изображения и оценивается величина его максимума. После подбора всех фаз в каждой группе амплитуда максимума отклика на точечный источник возрастает в N раз, т.е. в число элементов приемной УЗ решетки, что и должно быть. При использовании разнесенных УЗ датчиков (один приемный, а второй излучающий) все вышеописанные действия осуществляются для обоих датчиков.
амплитуда отраженного сигнала в точке «0» возросла, то это значение фазы запоминается, и такая же процедура повторяется для следующей группы элементов. В результате изменения и подбора фаз во всех 32 группах мы получим восстановленное изображение источника, близкого к расчетному. Другими словами, используя метод стохастической аппроксимации, мы согласуем волновой фронт в режиме приема с передаточной функцией кости без вычисления ее параметров. Заметим, что изменение фаз от 0 до +/-2π осуществляется для всех групп одновременно. На Фиг. 8 схематически представлена процедура стохастической аппроксимации на примере плоской волны. При данной процедуре сгенерированная УЗ датчиком (1) плоская волна (15), проходя через кость (2), образует искаженные волновые фронты (16). Затем происходит разбиение фронта на группы (17) плоских волн и приведение волн к одному фазовому центру (компенсация времен задержек), подбор фазы в каждой группе (18) и объединение групп и восстановленный исходный волновой фронт плоской волны (19). Еще раз отметим, что при каждом изменении фазы в группе осуществляется восстановление изображения и оценивается величина его максимума. После подбора всех фаз в каждой группе амплитуда максимума отклика на точечный источник возрастает в N раз, т.е. в число элементов приемной УЗ решетки, что и должно быть. При использовании разнесенных УЗ датчиков (один приемный, а второй излучающий) все вышеописанные действия осуществляются для обоих датчиков.
На Фиг. 9 представлен общий вид устройства для УЗ сканирования (20). Устройство (20) представляет собой шлемовидную конструкцию, содержащую корпус (25), выполненный в виде полого кольца, опоясывающего голову пациента при осуществлении УЗ сканирования.
Многомерный УЗ датчик (1) располагается на дугообразных направляющих (22), которые расположены в верхней части конструкции устройства (20) и выполненными с возможностью их перемещения при помощи элементов управления поворотом направляющих (24), причем на упомянутых направляющих (22) установлены один или более многоэлементных УЗ датчиков (1) (показан вариант с одним датчиком), излучатель (21) и датчики позиционирования (23). Многоэлементный УЗ датчик (1) располагается на фиксированном расстоянии L от излучателя (21), а датчики позиционирования (23) выполнены с возможностью измерения углов поворота и положений УЗ датчика (1) и излучателя (23). УЗ датчик (1) выполнен с возможностью излучения в заданном секторе углов коротких импульсов с заданной формой волнового фронта в виде сферической волны с переменным фокусным расстоянием по нормали к УЗ датчику (1), которые принимаются элементами этого УЗ датчика от, по меньшей мере, одного рассеивателя, расположенного на заданном фокусном расстоянии. Дугообразные направляющие (22) можно поворачивать с помощью устройств управления поворотом (24) на определенный угол для установки одного или более УЗ датчиков (1) в желаемую позицию на голове.
Устройство (20) может содержать, по меньшей мере, один дополнительный одномерный или двумерный УЗ датчик, причем при установке такого УЗ датчика, основной (1) и дополнительный один или более УЗ датчиков могут работать в режиме совмещенного приема-излучения или разнесенного приема-излучения. Дополнительный УЗ датчик может располагаться на одной направляющей совместно с основным УЗ датчиком (1) или на другой направляющей, в зависимости от необходимости конкретной реализации конструкции устройства для УЗ сканирования (20).
Устройство (20) может также содержать болюс (2), выполненный из акустически прозрачного материала, например силикона, располагаемый между каждым УЗ датчиком и головой пациента.
На Фиг. 10 представлена система системы для УЗ визуализации структур мозга через толстые кости черепа, которая содержит:
- устройство для УЗ сканирования (20);
- блоки предварительных усилителей (БПУ), каждый из которых содержит множество приемных каналов, АЦП и ПЛИС;
- многоканальный усилитель мощности (МУМ), содержащий ЦАП;
- и ЭВМ, содержащую, по меньшей мере, один процессор, интерфейсы ввода/вывода и средство памяти, связанную с помощью интерфейса цифровой обработки сигналов (ЦОС-интерфейс) с БПУ и МУМ;
причем в памяти упомянутой ЭВМ содержатся машиночитаемые команды, которые при их обработке, по меньшей мере, одним процессором, позволяют с помощью упомянутого устройства для УЗ сканирования излучать короткие импульсы с заданной формой волнового фронта в виде сферической волны с заданным фокусным расстоянием по нормали к УЗ датчику, осуществлять обработку импульсов, принимаемых элементами УЗ датчика от, по меньшей мере, одного рассеивателя, расположенного на упомянутом фокусном расстоянии, и по принятым эхо-сигналам восстанавливать изображение упомянутого, по меньшей мере, одного рассеивателя с помощью преобразования Фурье-Френеля.
УЗ приемо-излучающий датчик (1), состоящий из Nn*Mm обратимых пьезоэлементов, n=1…N, m=1…М, устанавливается в исходное положение, определяемое оператором, и его пространственные координаты (относительно его геометрического центра) измеряются датчиками системы позиционирования (23) и запоминаются в оперативной памяти ЭВМ.
С помощью обработки заложенных в памяти ЭВМ машиночитаемых инструкций задают исходные параметры зондирующего импульса U(t), а именно его длительность Т, период следования Т9 и амплитуду U0. Эти параметры в виде кода по контрольной шине данных М5 поступают в ПЛИС, и которая генерирует и запоминает излучаемые сигналы U(t), параметры которых соответствуют заданным искомым дальностям (глубинам) сканирования r(α,θ) для всех углов обзора α и θ, дискретности по дальности Δr и дискретность по углам Δα и Δθ, которые описывают сходящиеся сферические волны в однородной среде от УЗ датчика.
Далее выбирается импульсный сигнал со сходящейся формой волнового фронта ψ(1)(x, y, R0) по нормали к УЗ датчику (1) и все элементы УЗ датчика излучают эти импульсные сигналы с формой волнового фронта ψ(1)(x, y, R0), которые, пройдя неоднородный костный слой, им искажаются, отражаются от каких то рассеивателей, расположенных на заданном расстоянии по глубине R0, снова претерпевают искажения, пройдя через неоднородный костный слой, и попадают на элементы УЗ датчика (1), работающего в режиме приема.
Принятые отраженные эхо-сигналы, пройдя аналого-цифровую подсистему M1, ПЛИС через контрольную шину данных М5 и ДСП интерфейс М3, поступают в оперативную память компьютера (ЭВМ).
В ЭВМ по принятым эхо-сигналам с заданной дальности R0 измеряется форма принятого волнового фронта, которая затем аппроксимируется N линейными сегментами (см. Фиг. 8, поз. 17). Для каждого сегмента Nk, объединяющего некоторое число элементов УЗ датчика последовательно изменяется фаза сигналов от 0 до 2π, значение которой по контрольной шине данных передается в ПЛИС, ЦАПы (подсистема М2) и соответствующие элементы УЗ датчика (1), которые излучают эти сигналы с измененной фазой. По принятым эхо-сигналам для каждого значения измененной фазы в каждом сегменте осуществляется восстановление изображения и фазы сигналов, для которых качество изображения улучшилось, запоминаются. Критерием улучшения изображения является его амплитуда и ширина пространственного отклика. После всех итераций с подбором фаз в каждом сегменте восстанавливается изображение импульсного отклика. На Фиг. 11 показан пример итерационной стохастической аппроксимации фаз, где А - амплитуда отклика, Δ - его угловая ширина.
Представленное в настоящих материалах заявки описание заявленного решения раскрывает лишь предпочтительные варианты его осуществления и не должны трактоваться как ограничивающие иные, частные варианты осуществления, не выходящие за объем представленных сведений, которые должны быть очевидными для специалистов в данной области техники, имеющих обычную квалификацию, на которых рассчитано заявленное решение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ СТРУКТУР И СОСУДОВ ГОЛОВНОГО МОЗГА | 2002 |
|
RU2232547C2 |
| Способ компенсации искажений изображений головного мозга и кровотока в его сосудах при транскраниальных ультразвуковых исследованиях | 2017 |
|
RU2661046C1 |
| СПОСОБ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ ГОЛОВНОГО МОЗГА | 2004 |
|
RU2254810C1 |
| СПОСОБ ОБНАРУЖЕНИЯ АБЕРРАЦИЙ ПРИ УЛЬТРАЗВУКОВОМ ИССЛЕДОВАНИИ | 2022 |
|
RU2788389C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ СТЕПЕНИ ПОВРЕЖДЕННОСТИ МЕТАЛЛОВ КОНТЕЙНЕРОВ | 2015 |
|
RU2614186C1 |
| СПОСОБ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ ГОЛОВНОГО МОЗГА | 2020 |
|
RU2750965C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| МНОГОЭЛЕМЕНТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2294061C1 |
| СПОСОБ ДИАГНОСТИКИ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ, ЗВУКОВЫХ И ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 2007 |
|
RU2378989C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТИПА ДЕФЕКТА В МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЯХ | 2013 |
|
RU2524451C1 |
Группа изобретений относится к медицинской технике, а именно к средствам для транскраниальной ультразвуковой диагностики. Способ получения ультразвуковых изображений структур мозга через толстые кости черепа заключается в установке одного или более многоэлементных УЗ датчиков на голове пациента, с возможностью их механического перемещения, при этом каждый из упомянутых многоэлементных УЗ датчиков в передающем режиме излучает импульсы в виде сферической волны с заданным фокусным расстоянием в заданном секторе обзора, которые принимаются элементами этого УЗ датчика от, по меньшей мере, одной структуры мозговой ткани, расположенной на заданном фокусном расстоянии, и по принятым эхо-сигналам от УЗ датчика восстанавливают изображение структуры мозговой ткани путем преобразования Фурье-Френеля с учетом компенсации времени задержек отраженного УЗ сигнала от различных толщин кости черепа и формирования плоского волнового фронта. Устройство для УЗ транскраниального сканирования выполнено в виде шлемовидной конструкции, содержащей корпус с, по меньшей мере, двумя дугообразными направляющими, расположенными в верхней части шлемовидной конструкции с возможностью их перемещения. На направляющих установлены основной многоэлементный одномерный или двумерный УЗ датчик, по меньшей мере, один датчик излучатель, работающий в режиме излучения, и датчики позиционирования, причем упомянутый основной многоэлементный УЗ датчик располагается на фиксированном расстоянии L от датчика излучателя, а датчики позиционирования выполнены с возможностью измерения углов поворота и положений основного УЗ датчика и, по меньшей мере, одного датчика излучателя. Система для УЗ визуализации структур мозга содержит устройство для УЗ транскраниального сканирования, блоки предварительных усилителей (БПУ), каждый из которых содержит множество приемных каналов, АЦП и ПЛИС, многоканальный усилитель мощности, содержащий ЦАП, и ЭВМ, содержащую, по меньше мере, один процессор, интерфейсы ввода/вывода и средство памяти, связанную с помощью интерфейса цифровой обработки сигналов с БПУ и МУМ. Использование изобретений позволяет повысить точность получаемых данных при проведении транскраниальных УЗ исследований 3 н. и 16 з.п. ф-лы, 11 ил., 1 табл.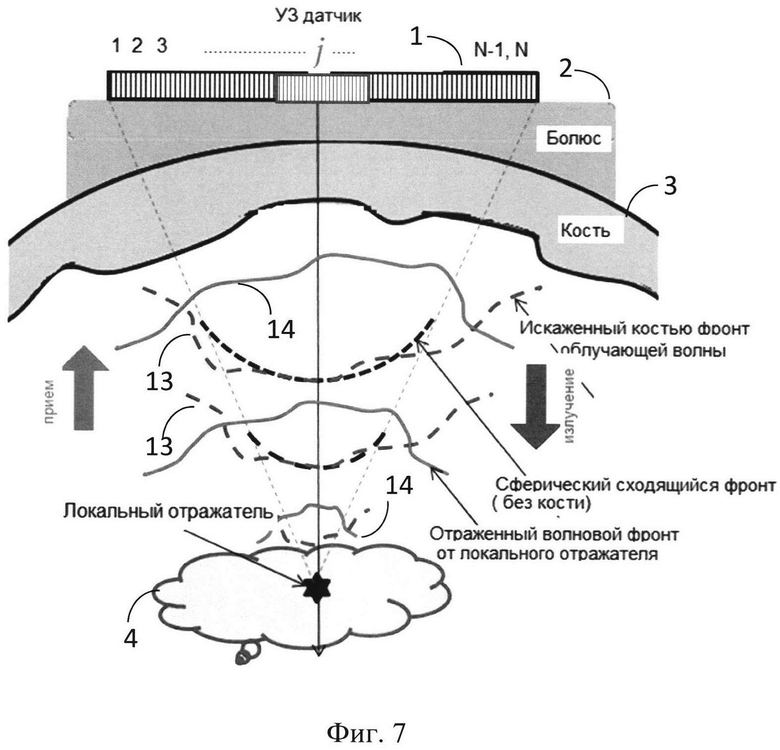
1. Способ получения ультразвуковых изображений структур мозга через толстые кости черепа, использующий принципы эхо-локации с помощью, по меньшей мере, одного или нескольких многоэлементных одномерных и/или двумерных УЗ датчиков, работающих в режиме совмещенного приема-излучения, при котором многоэлементный датчик работает одновременно в режиме приема и излучения сигнала, или в режиме разнесенного приема-излучения, при котором один датчик является излучателем УЗ сигнала, а другой датчик приемным отраженного УЗ сигнала,
причем упомянутые один или более датчиков установлены на голове пациента, с возможностью их механического перемещения, и каждый из упомянутых многоэлементных УЗ датчиков в передающем режиме излучает импульсы в виде сферической волны с заданным фокусным расстоянием в заданном секторе обзора, которые принимаются элементами этого УЗ датчика от, по меньшей мере, одной структуры мозговой ткани, расположенной на заданном фокусном расстоянии, и по принятым эхо-сигналам от УЗ датчика восстанавливается изображение упомянутой структуры мозговой ткани путем преобразования Фурье-Френеля с учетом компенсации времени задержек отраженного УЗ сигнала от различных толщин кости черепа и формирования плоского волнового фронта.
2. Способ по п. 1, отличающийся тем, что по принятым отраженным сигналам оценивается форма принятого волнового фронта ψ(1)(х,у) от структуры мозговой ткани, по нормали к приемному УЗ датчику, которая аппроксимируется N произвольными кусочно-линейными сегментами волновых фронтов, образованными группами элементов приемного УЗ датчика, причем число элементов в каждой группе может быть произвольным.
3. Способ по п. 2, отличающийся тем, что при восстановлении изображения по заданной аппроксимированной форме волнового фронта для всех участков Nк, принадлежащих N, оценивается вид функции точечного источника путем преобразования Фурье-Френеля от принятых эхо-сигналов с элементов приемного УЗ датчика при изменении фаз сигналов в каждом участке аппроксимации от 0 до 2π; причем запоминаются только те фазы в группах приемных элементов, которые приводят к возрастанию амплитуды отраженного сигнала от структуры мозговой ткани и уменьшению ширины упомянутой амплитуды по пространственным координатам х, у, в результате чего формируется вторая оценка формы волнового фронта ψ(2)(x,y); осуществляют сравнение полученных функций ψ(1)(x,y) и ψ(2)(x,y) по δψ=|(х,у)-ψ(2)(х,у|≤ε=min критерию, где величина ε - заданная величина погрешности, причем если погрешность ε значительно отличается от заданной, то повторяют определение ψ(1)(x,y) до тех пор, пока погрешность ε не достигнет минимального значения.
4. Способ по п. 2, отличающийся тем, что по сформированной функции ψ(2)(x,y) рассчитываются корректирующие фазовые множители во всех элементах приемного УЗ датчика для заданных углов сканирования α и β, и для восстановления УЗ изображения используются преобразования типа Фурье-Френеля с учетом полученных корректирующих фазовых множителей.
5. Устройство для УЗ транскраниального сканирования, выполненное в виде шлемовидной конструкции, содержащей корпус с, по меньшей мере, двумя дугообразными направляющими, расположенными в верхней части шлемовидной конструкции и выполненными с возможностью их перемещения, причем на упомянутых направляющих установлены:
- основной многоэлементный одномерный или двумерный УЗ датчик, выполненный с возможностью приема и излучения импульсов в заданном секторе углов с заданной формой волнового фронта в виде сферической волны с переменным фокусным расстоянием по нормали к УЗ датчику, которые принимаются элементами этого УЗ датчика от, по меньшей мере, одной структуры мозговой ткани, расположенной на заданном фокусном расстоянии, причем выполненный с возможностью механического перемещения по направляющей;
- по меньшей мере, один датчик излучатель, работающий в режиме излучения; и датчики позиционирования,
причем упомянутый основной многоэлементный УЗ датчик располагается на фиксированном расстоянии L от датчика излучателя, а датчики позиционирования выполнены с возможностью измерения углов поворота и положений основного УЗ датчика и, по меньшей мере, одного датчика излучателя.
6. Устройство по п. 5, отличающееся тем, что перемещение направляющих осуществляется с помощью элементов управления поворотом направляющих.
7. Устройство по п. 5, отличающееся тем, что дополнительно содержит болюс, выполненный из акустически прозрачного материала, располагаемый между основным УЗ датчиком и головой пациента.
8. Устройство по п. 5, отличающееся тем, что дополнительно содержит, по меньшей мере, один дополнительный многоэлементный УЗ одномерный или двумерный датчик.
9. Устройство по п. 8, отличающееся тем, что основной УЗ датчик и, по меньшей мере, один дополнительный УЗ датчик осуществляют работу в режиме совмещенного приема-излучения или разнесенного приема-излучения.
10. Устройство по п. 9, отличающееся тем, что основной УЗ датчик и, по меньшей мере, один дополнительный УЗ датчик располагаются на одной направляющей или на разных направляющих.
11. Устройство по п. 5, отличающееся тем, что многоэлементный УЗ датчик выполнен обратимым и состоит из N*M отдельных пьезоэлементов, работающих как в режиме приема, так и в режиме излучения.
12. Система для УЗ визуализации структур мозга через толстые кости черепа, содержащая
- устройство для УЗ транскраниального сканирования по любому из пп. 5-11;
- блоки предварительных усилителей (БПУ), каждый из которых содержит множество приемных каналов, АЦП и ПЛИС (Программируемая логическая интегральная схема);
- многоканальный усилитель мощности (МУМ), содержащий ЦАП;
- и ЭВМ, содержащую, по меньше мере, один процессор, интерфейсы ввода/вывода и средство памяти, связанную с помощью интерфейса цифровой обработки сигналов (ЦОС-интерфейс) с БПУ и МУМ;
причем в памяти упомянутой ЭВМ содержатся машиночитаемые команды, которые при их обработке, по меньшей мере, одним процессором позволяют с помощью упомянутого устройства для УЗ сканирования излучать импульсы с заданной формой волнового фронта в виде сферической волны с заданным фокусным расстоянием по нормали к УЗ датчику, осуществлять обработку импульсов, принимаемых элементами УЗ датчика от, по меньшей мере, одной структуры мозговой ткани, расположенной на упомянутом фокусном расстоянии, и по принятым отраженным УЗ сигналам восстанавливать изображение упомянутой, по меньшей мере, одной структуры мозговой ткани с помощью преобразования Фурье-Френеля с учетом компенсации времени задержек отраженного УЗ сигнала от различных толщин кости черепа и формирования плоского волнового фронта.
13. Система по п. 12, отличающаяся тем, что с помощью ЭВМ выполняется установка исходных параметров сигналов - зондирующего импульса U(t), а именно его длительность Т, период следования Т9 и амплитуду U0.
14. Система по п. 13, отличающаяся тем, что упомянутые параметры передаются в ПЛИС БПУ для последующего генерирования и запоминания излучаемых сигналов U(t), параметры которых соответствуют заданным искомым дальностям (глубинам) сканирования r(α,θ) для всех углов обзора α и θ, дискретности по дальности Δr и дискретность по углам Δα и Δθ, которые описывают сходящиеся сферические волны в однородной среде от УЗ датчика.
15. Система по п. 14, отличающаяся тем, что отраженные эхо-сигналы через УЗ датчик устройства УЗ сканирования передаются на входы БПУ для последующей обработки ПЛИС.
16. Система по п. 15, отличающаяся тем, что ЭВМ с помощью, по меньшей мере, одного процессора вычисляется форма принятого волнового фронта по отраженным УЗ эхо-сигналам.
17. Система по п. 16, отличающаяся тем, что форма волнового фронта аппроксимируется N линейными сегментами.
18. Система по п. 17, отличающаяся тем, что для каждого сегмента Nk, объединяющего некоторое число элементов УЗ датчика, последовательно изменяется фаза сигналов от 0 до 2π, значение которой передается в ПЛИС, ЦАПы и соответствующие элементы УЗ датчика, которые осуществляют излучение полученных сигналов с измененной фазой.
19. Система по п. 18, отличающаяся тем, что по принятым отраженным УЗ эхо-сигналам для каждого значения измененной фазы в каждом сегменте осуществляется восстановление изображения и фазы сигналов, для которых качество изображения улучшилось, запоминаются
| US 2012083717 A1, 05.04.2012 | |||
| US 2004210135 A1, 21.10.2004 | |||
| US 2014031684 A1, 30.01.2014 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ СТРУКТУР И СОСУДОВ ГОЛОВНОГО МОЗГА | 2002 |
|
RU2232547C2 |

