ОБЛАСТЬ ТЕХНИКИ
[1] Настоящее изобретение относится к области пространственно-временного анализа, в частности, относится к способу, аппарату, устройству, системе и носителю данных для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения.
УРОВЕНЬ ТЕХНИКИ
[2] Данные о пространственно-временном поведении субъекта в сцене виртуальной реальности или сцене смешанной реальности представляют собой важный показатель для изучения того, соответствует ли сцена виртуальной реальности или сцена смешанной реальности ожиданиям пользователя. Следовательно, это имеет большое значение для расширения функций технологии виртуальной реальности или технологии смешанной реальности, которые внедряют пространственно-временной анализ в технологию виртуальной реальности или технологию смешанной реальности. Для того чтобы проанализировать пространственно-временное поведение в виртуальной реальности, необходимо подкрепить его научным показателем оценки и объективными количественными данными, а также получить траекторию перемещения субъекта в сцене виртуальной реальности или в сцене смешанной реальности, чтобы проанализировать удовлетворенность пользователя в сцене виртуальной реальности или сцене смешанной реальности.
[3] В настоящее время еще не начали комбинировать пространственно-временной анализ и сцену виртуальной реальности или сцену смешанной реальности. Кроме того, в существующей технологии пространственного позиционирования в виртуальной реальности или смешанной реальности, такой как лазерное позиционирование, инфракрасное позиционирование, ультразвуковое позиционирование и т.д., можно только калибровать положение субъекта и интерактивного устройства в виртуальном трехмерном пространстве в реальном времени, и она ограничена конструкцией и отображением сцены виртуальной реальности или сцены смешанной реальности. Пространственная информация о субъекте, перемещающемся в сцене виртуальной реальности или сцене смешанной реальности, не может быть записана всесторонне, полностью и систематически.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[4] Чтобы всесторонне, полностью и систематически записывать пространственную информацию о субъекте, перемещающемся в сцене виртуальной реальности или сцене смешанной реальности, согласно настоящему изобретению предоставлены способ, аппарат, устройство, система и носитель данных для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения.
[5] Во-первых, согласно настоящему изобретению предоставлен способ сбора данных и создания траектории пространственно-временного поведения, в котором применяются следующие технические решения.
[6] Способ сбора данных и создания траектории пространственно-временного поведения включает:
[7] получение первого временного ряда, содержащего множество точек выборки, которые являются точками проекции устройства отображения реальности;
[8] принятие любой из множества точек выборки в качестве текущей точки выборки; установку временного окна на основе времени выборки текущей точки выборки и нахождение первой точки выборки и последней точки выборки в пределах временного окна; принятие первого положения в качестве центра круга, который является центральной точкой устройства отображения реальности, соответствующей текущей точке выборки, и вычисление угловой скорости между первой точкой выборки и последней точкой выборки; если угловая скорость больше заданного порогового значения угловой скорости, принятие текущей точки выборки в качестве точки смещения;
[9] обработку множества точек выборки, как описано выше, с получением второго временного ряда, содержащего множество точек смещения;
[10] составление карты траектории перемещения на основе второго временного ряда.
[11] В приведенном выше техническом решении на основе множества точек выборки, указывающих на положение субъекта, оценивают каждую точку выборки путем установки временного окна, угловой скорости и других параметров, и быстро удаляют точку выборки с небольшим отклонением, а также отсеивают точку смещения, соответствующую требованию, затем составляют карту траектории перемещения через точку смещения. Таким образом, можно не только повысить эффективность составления, но и четко описать траекторию перемещения субъекта в сцене виртуальной реальности или сцене смешанной реальности, чтобы всесторонне, полностью и систематически записать пространственную информацию субъекта, перемещающегося в сцене виртуальной реальности или сцене смешанной реальности, и обеспечить поддержку данных для последующего анализа пространственно-временных данных, чтобы проанализировать удовлетворенность пользователя в сцене виртуальной реальности или сцене смешанной реальности.
[12] В некоторых вариантах осуществления среднее время временного окна является временем выборки текущей точки выборки, и временное окно содержит моменты времени выборки, соответствующие по меньшей мере трем точкам выборки.
[13] В некоторых вариантах осуществления для любой из множества точек выборки перед установкой временного окна на основе времени выборки текущей точки выборки дополнительно включают:
[14] если временной интервал между двумя смежными точками выборки в первом временном ряду находится в пределах заданного интервала, выполнение заполнения данными в промежутке между двумя смежными точками выборки.
[15] В приведенном выше техническом решении заполнение данными для недействительного интервала выборки, в котором не собираются данные о положении субъекта, позволяет обеспечить непрерывность траектории перемещения субъекта.
[16] В некоторых вариантах осуществления заполнение данными в промежутке между двумя смежными точками выборки включает:
[17] заполнение точками выборки на линии, соединяющей две смежные точки выборки, согласно первому интервалу; первый интервал вычисляют согласно расстоянию между двумя смежными точками выборки и количеству недействительных точек выборки между двумя смежными точками выборки; количество недействительных точек выборки вычисляют согласно временному интервалу между двумя смежными точками выборки и периоду выборки.
[18] В некоторых вариантах осуществления перед составлением карты траектории перемещения на основе второго временного ряда дополнительно включают:
[19] если временной интервал между двумя смежными точками смещения во втором временном ряду меньше порогового значения первого временного интервала, определение того, является ли прилежащий угол между двумя соединительными линиями, соответственно соединяющими две смежные точки смещения со вторым положением, больше заданного порогового значения угла. Среди них второе положение представляет собой центральную точку устройства отображения реальности, соответствующую точке смещения с более поздним временем выборки в двух смежных точках смещения;
[20] если да, слияние двух смежных точек смещения в новую точку смещения.
[21] В приведенном выше техническом решении слияние двух смежных точек смещения, соответствующих требованию по углу, может не только уменьшить объем вычислений последующих данных, но также гарантировать, что выбранные точки смещения могут точно указывать на фактическое перемещение субъекта.
[22] В некоторых вариантах осуществления перед составлением карты траектории перемещения на основе второго временного ряда дополнительно включают:
[23] принятие любой из точек смещения в качестве текущей точки смещения; если время пребывания, в течение которого субъект находится в текущей точке смещения, меньше порогового значения второго временного интервала, отбрасывание текущей точки смещения; время пребывания субъекта в текущей точке смещения представляет собой временной интервал между временем выборки текущей точки смещения и временем выборки следующей точки смещения.
[24] В приведенном выше техническом решении, если время пребывания субъекта в текущей точке смещения не соответствует требованию, она идентифицируется как бесполезная точка смещения, а объем данных может быть уменьшен, чтобы обеспечить вычислительную способность компьютера.
[25] В некоторых вариантах осуществления карта траектории перемещения содержит карту маршрута смещения; составление карты траектории перемещения на основе множества точек смещения включает:
[26] получение параметра отображения каждой точки смещения, который включает цвет, направление и площадь; в частности, направление указывается от предыдущей точки смещения к текущей точке смещения, площадь положительно коррелирует с временем пребывания, в течение которого субъект находится в текущей точке смещения; время пребывания субъекта в текущей точке смещения представляет собой временной интервал между временем выборки текущей точки смещения и временем выборки следующей точки смещения;
[27] создание карты маршрута смещения на основе параметра отображения каждой точки смещения.
[28] В некоторых вариантах осуществления карта траектории перемещения содержит термограмму траектории; составление карты траектории перемещения на основе множества точек смещения включает:
[29] получение по меньшей мере одной области SOI и подсчет количества точек смещения в по меньшей мере одной области SOI;
[30] для любой из областей SOI определение значения интенсивности цвета на основе времени пребывания, в течение которого субъект находится в каждой точке смещения, и количества точек смещения в единичной площади, и составление термограммы траектории в текущей области SOI на основе значения интенсивности цвета; в частности, время пребывания субъекта в каждой точке смещения представляет собой временной интервал между временем выборки каждой точки смещения и временем выборки следующей точки смещения.
[31] В некоторых вариантах осуществления после составления карты траектории перемещения на основе множества точек смещения дополнительно включают:
[32] получение данных о перемещении глаз и/или данных о физиологических признаках субъекта в каждой точке смещения и отметку данных о перемещении глаз и/или данных о физиологических признаках каждой точки смещения на карте траектории перемещения;
[33] в частности, данные о физиологических признаках содержат по меньшей мере одно из электроэнцефалограммы (ЭЭГ), электромиографии (ЭМГ), частоты сердечных сокращений, артериального давления, пульса, температуры тела и частоты дыхания.
[34] В некоторых вариантах осуществления дополнительно включают:
[35] получение по меньшей мере одной области SOI;
[36] извлечение точки смещения в по меньшей мере одной области SOI и создание данных оценки доступа каждой области SOI; нормализацию количества доступов, общего времени пребывания и доли времени доступа в данных оценки доступа каждой области SOI, а затем вычисление показателя оценки доступа каждой области SOI на основе взвешенной суммы; и/или
[37] извлечение данных о перемещении глаз в по меньшей мере одной области SOI и создание данных оценки взгляда каждой области SOI; нормализацию общего времени продолжительности взгляда, количества взглядов и доли времени взгляда в данных по оценке взгляда каждой области SOI, а затем вычисление показателя оценки взгляда каждой области SOI на основе взвешенной суммы; и/или
[38] извлечение данных о физиологических признаках в по меньшей мере одной области SOI и создание данных оценки изменения физиологических признаков каждой области SOI; нормализацию данных оценки изменения физиологических признаков каждой области SOI, а затем вычисление показателя оценки изменения физиологических признаков каждой области SOI на основе взвешенной суммы.
[39] Во-вторых, согласно настоящему изобретению предоставлен аппарат для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, в котором применяются следующие технические решения.
[40] Аппарат для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения содержит:
[41] модуль получения точки выборки, выполненный для получения первого временного ряда, содержащего множество точек выборки, которые являются точками проекции устройства отображения реальности;
[42] модуль получения точки смещения, выполненный для: принятия любой из множества точек выборки в качестве текущей точки выборки; установки временного окна на основе времени выборки текущей точки выборки и нахождения первой точки выборки и последней точки выборки в пределах временного окна; принятия первого положения в качестве центра круга, который является центральной точкой устройства отображения реальности, соответствующей текущей точке выборки, и вычисления угловой скорости между первой точкой выборки и последней точкой выборки; если угловая скорость больше заданного порогового значения угловой скорости, принятия текущей точки выборки в качестве точки смещения; обработки множества точек выборки, как описано выше, с получением второго временного ряда, содержащего множество точек смещения; и
[43] модуль составления, выполненный для составления карты траектории перемещения на основе второго временного ряда.
[44] В-третьих, согласно настоящему изобретению предоставлено электронное устройство, в котором применяются следующие технические решения.
[45] Электронное устройство содержит память и процессор; память может быть выполнена для хранения компьютерной программы, способной загружаться с помощью процессора и исполнять любой из способов, как описано в первом аспекте.
[46] В-четвертых, согласно настоящему изобретению предоставлена система для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, в которой применяются следующие технические решения.
[47] Система для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения содержит устройство отображения реальности и электронное устройство, как описано в третьем аспекте;
[48] устройство отображения реальности выполнено для сбора данных о координатах точки проекции устройства отображения реальности на основе заданной частоты выборки и отправки координат точки проекции устройства отображения реальности на электронное устройство;
[49] электронное устройство выполнено для получения координат точки проекции устройства отображения реальности и создания первого временного ряда, содержащего множество точек выборки, на основе координат точки проекции устройства отображения реальности.
[50] В-пятых, согласно настоящему изобретению предоставлен машиночитаемый носитель данных, в котором применяются следующие технические решения.
[51] Машиночитаемый носитель данных выполнен для хранения компьютерной программы, способной загружаться с помощью процессора и исполнять любой из способов, как описано в первом аспекте.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
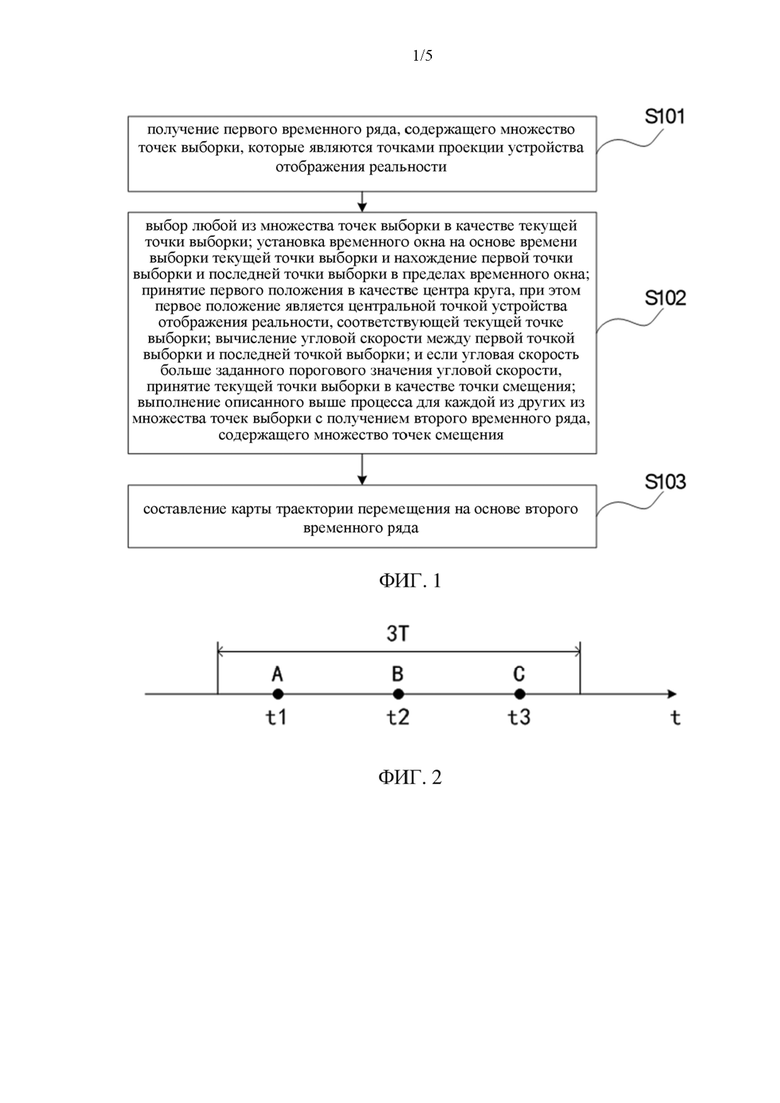
[52] ФИГ. 1 представляет собой блок-схему способа сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения согласно вариантам осуществления настоящего изобретения.
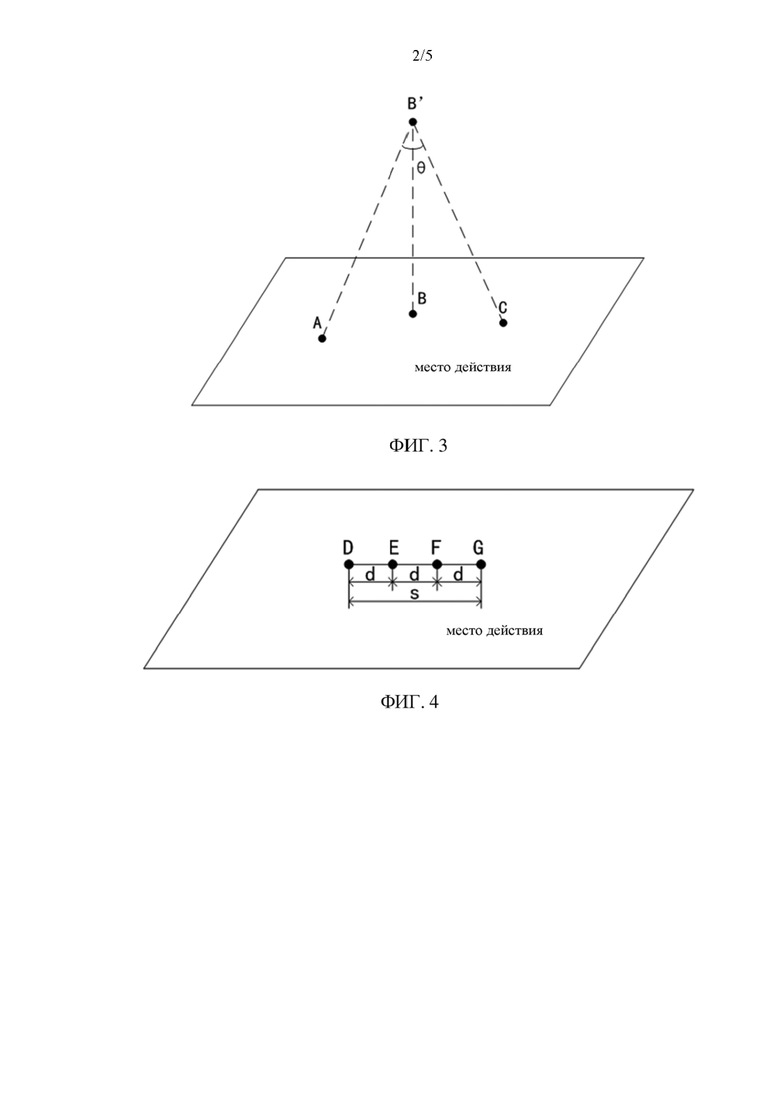
[53] ФИГ. 2 представляет собой схему временного распределения моментов времени выборки с 3T в качестве временного окна согласно вариантам осуществления настоящего изобретения.
[54] ФИГ. 3 представляет собой схему пространственного распределения моментов времени выборки с 3T в качестве временного окна согласно вариантам осуществления настоящего изобретения.
[55] ФИГ. 4 представляет собой схему заполнения точек выборки согласно вариантам осуществления настоящего изобретения.
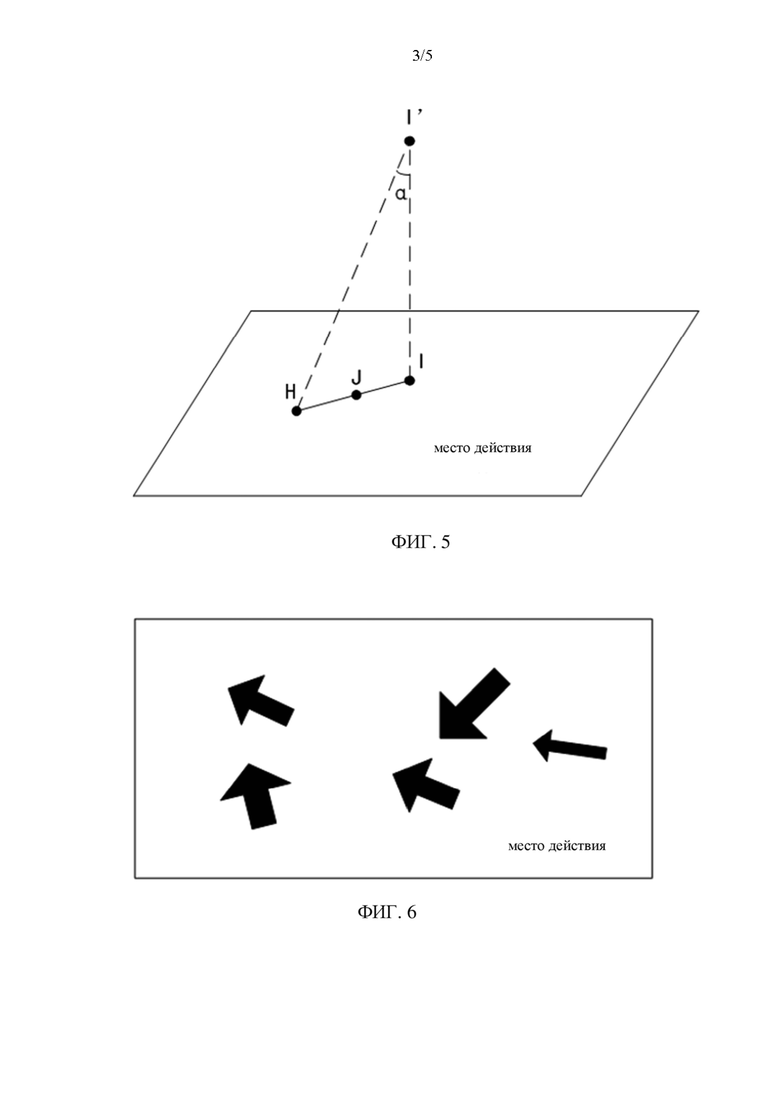
[56] ФИГ. 5 представляет собой схему слияния точек смещения согласно вариантам осуществления настоящего изобретения.
[57] ФИГ. 6 представляет собой планарную схему одной из карт маршрутов смещения согласно вариантам осуществления настоящего изобретения.
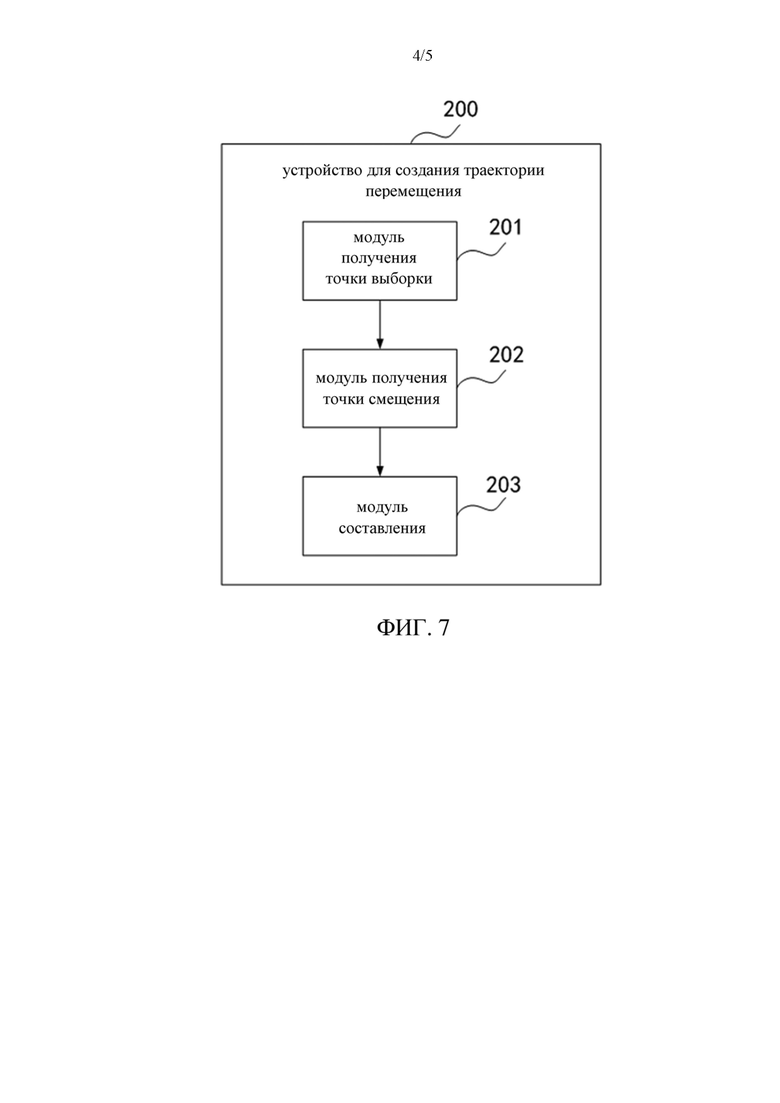
[58] ФИГ. 7 представляет собой блок-схему структуры аппарата для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения согласно вариантам осуществления настоящего изобретения.
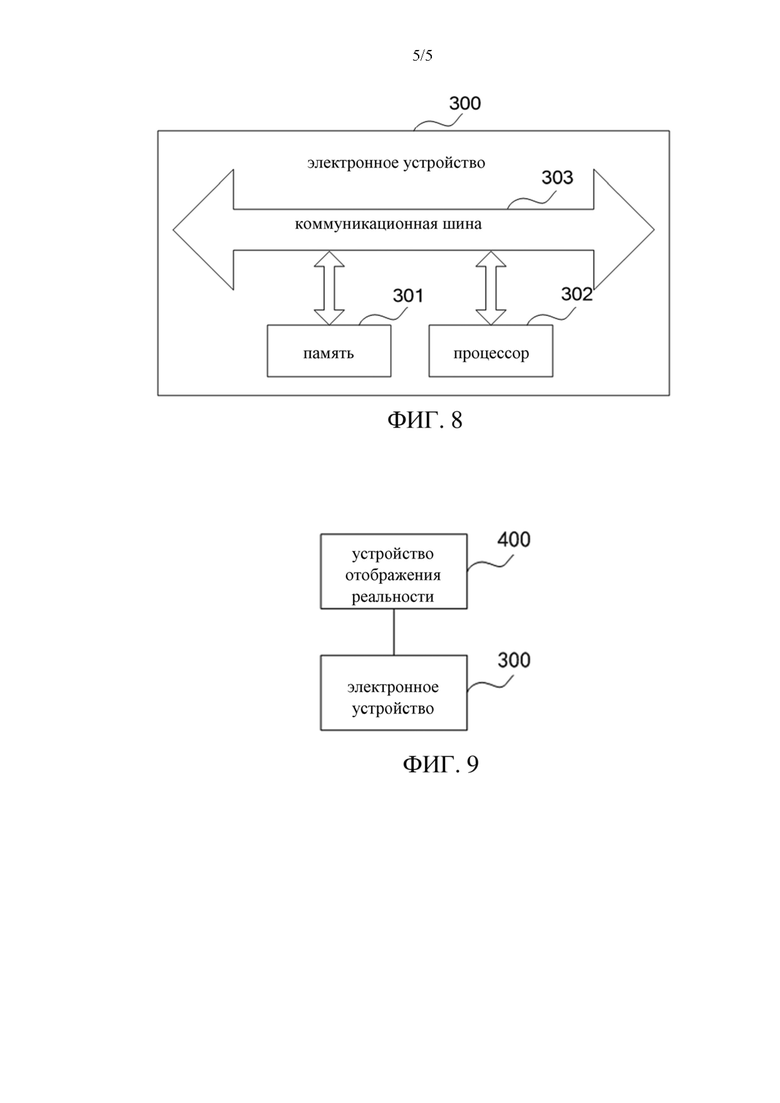
[59] ФИГ. 8 представляет собой блок-схему структуры электронного устройства согласно вариантам осуществления настоящего изобретения.
[60] ФИГ. 9 представляет собой блок-схему структуры системы для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения согласно вариантам осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[61] Вариант осуществления настоящего изобретения дополнительно описан подробно в сочетании с приведенными выше графическими материалами.
[62] Сначала кратко описываются основные термины, включенные в вариант осуществления настоящего изобретения и включенные в технологию позиционирования в виртуальной реальности или в смешанной реальности, и включенные основные термины являются следующими.
[63] Субъект: целевой субъект, действующий в сцене виртуальной реальности или сцене смешанной реальности.
[64] SOI (сигнал интереса): определенная область в сцене виртуальной реальности или сцене смешанной реальности, которая находится в центре внимания исследователя.
[65] Сцена виртуальной реальности: в системе виртуальной реальности трехмерная сцена или двухмерная сцена, где субъект пребывает и взаимодействует, например, сцена трехмерной модели, панорамное изображение, панорамное видео и т.д.
[66] Сцена смешанной реальности: в системе смешанной реальности новая визуальная среда, создаваемая путем объединения сцены реальности и виртуальной сцены.
[67] Точка проекции устройства отображения реальности: устройство отображения реальности содержит устройство отображения VR (виртуальной реальности) и устройство отображения MR (опосредованной реальности); в сцене виртуальной реальности излучение вертикального луча из центральной точки устройства отображения VR на место действия сцены виртуальной реальности, а точка, где луч соприкасается с сеткой земли, является точкой проекции устройства отображения VR; в сцене смешанной реальности излучение вертикального луча из центральной точки устройства отображения MR на место действия сцены смешанной реальности, и точка, где луч соприкасается с сеткой земли, является точкой проекции устройства отображения MR.
[68] Карта маршрута смещения: карта маршрута смещения субъекта в сцене виртуальной реальности или сцене смешанной реальности, отображаемая согласно точке проекции устройства отображения реальности на месте действия сцены виртуальной реальности или сцены смешанной реальности в разные моменты времени и представленная в форме стрелы.
[69] Технология позиционирования в виртуальной реальности или технология позиционирования в смешанной реальности, как правило, включает следующее.
[70] Лазерное позиционирование: применение позиционирующей осветительной мачты для излучения лазеров, сканирующих как в горизонтальном, так и в вертикальном направлениях в пространстве позиционирования; устройство отображения реальности с позиционированием снабжено множеством лазерных индукционных приемников; вычисление координат субъекта путем вычисления разницы углов между двумя световыми лучами, достигающими позиционирующего объекта.
[71] Инфракрасное позиционирование: съемка сцены в помещении с применением камеры и отслеживание активной светящейся точки-маркера на устройстве отображения реальности, а также распознавание разных точек позиционирования по разным цветам.
[72] Ультразвуковое позиционирование: система ультразвукового позиционирования содержит транспондер и основной дальномер, и транспондер обеспечен в нескольких местах внутри помещения; устройство отображения реальности снабжено основным дальномером и измеряет расстояния между устройством отображения реальности и по меньшей мере тремя транспондерами путем излучения радиоволны и с помощью принципа сонара. Затем, исходя из того, что координаты транспондера известны, положение основного дальномера вычисляют с помощью алгоритма треугольника, то есть позиционирование субъекта в помещении завершается.
[73] В конкретной сцене, на основе исследования пространственно-временного поведения человека в среде виртуального супермаркета VR, разные области продуктов супермаркета делятся на разные области интересов SOI. Изучая траекторию ходьбы человека в супермаркете и порядок вхождения в разные области интересов, можно проанализировать различия траектории потребительского поведения и времени пребывания людей разного пола в разных пространственно-временных положениях.
[74] В вариантах осуществления настоящего изобретения раскрывается способ сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, который применяется в электронном устройстве. Электронное устройство включает, без ограничения: мобильный терминал, такой как мобильный телефон, ноутбук, цифровой радиоприемник, ПЦП (персональный цифровой помощник), ППК (планшетный персональный компьютер), ПМП (портативный мультимедийный проигрыватель), автомобильный терминал (например, автомобильный навигационный терминал) и т.д., и стационарный терминал, например, цифровое телевидение, настольный компьютер и т.д., а также сервер и т.д.
[75] Как показано на ФИГ. 1, способ сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, как правило, включает следующие шаги.
[76] Шаг S101, получение первого временного ряда, содержащего множество точек выборки, которые являются точками проекции устройства отображения реальности.
[77] В частности, устройство отображения реальности, которое носит субъект, собирает данные о положении субъекта с помощью встроенного в него датчика положения согласно заданной частоте выборки и отправляет данные о положении на электронное устройство в реальном времени путем беспроводной или проводной передачи. Затем электронное устройство упорядочивает принятые данные о положении в порядке времени выборки с получением первого временного ряда.
[78] В этом варианте осуществления точка выборки положения соответствует данным о положении поочередно. Данные о положении субъекта представляют собой координаты точки проекции устройства отображения реальности, которое носит субъект. Точка выборки представляет собой точку проекции устройства отображения реальности в соответствующем времени выборки. Способ получения координат может относиться к лазерным, инфракрасным, ультразвуковым и другим технологиям позиционирования, упомянутым выше. Устройством отображения реальности может быть, без ограничения, шлем VR, очки VR и другие устройства виртуальной реальности. При этом данный вариант осуществления конкретно не является ограниченным.
[79] Шаг S102, принятие любой из множества точек выборки в качестве текущей точки выборки; установка временного окна на основе времени выборки текущей точки выборки и нахождение первой точки выборки и последней точки выборки в пределах временного окна; принятие первого положения в качестве центра круга, который является центральной точкой устройства отображения реальности, соответствующей текущей точке выборки, и вычисление угловой скорости между первой точкой выборки и последней точкой выборки; если угловая скорость больше заданного порогового значения угловой скорости, принятие текущей точки выборки в качестве точки смещения; обработка множества точек выборки, как описано выше, с получением второго временного ряда, содержащего множество точек смещения.
[80] Как правило, в первом временном ряду находится много точек выборки. Чтобы уменьшить объем данных, записываемый и анализируемый системой, необходимо отсеивать репрезентативную точку смещения. Репрезентативная точка смещения представляет собой точку выборки с большой амплитудой отклонения субъекта. Поскольку точка выборки с малым относительным смещением не способствует последующему составлению траектории перемещения, что не только влияет на эффективность составления, но и приводит к проблеме нечеткого описания траектории перемещения субъекта в сцене виртуальной реальности или сцене смешанной реальности. Таким образом, точки выборки с очень малым относительным смещением можно игнорировать. Прежде чем составлять карту траектории перемещения, необходимо сначала отфильтровать все точки выборки и выбрать точки смещения, которые можно применять для составления карты траектории перемещения.
[81] Из-за большой разницы в высоте субъектов размер их шага сильно зависит от их высоты, Если расстояние смещения субъекта напрямую применяют для определения степени отклонения субъекта, легко обеспечить отклонение в результате. По сравнению со способом определения расстояния смещения угловую скорость можно применять в вариантах осуществления настоящего изобретения для быстрого определения степени отклонения субъекта, эффективного исключения фактора высоты и более точной оценки степени отклонения точки выборки.
[82] На шаге S102 среднее время временного окна является временем выборки текущей точки выборки. Временное окно включает моменты времени выборки, соответствующие по меньшей мере трем точкам выборки, то есть временное окно не должно быть меньше двух периодов выборки (2T).
[83] Конечно, для временного окна также необходимо установить верхнее предельное значение, которое может составлять 4T, 6T или 8T, то есть временное окно не должно быть больше чем 4T, 6T или 8T.
[84] В одном варианте осуществления первая точка выборки может быть точкой выборки, соответствующей минимальному времени выборки в пределах временного окна, а последняя точка выборки может быть точкой выборки, соответствующей максимальному времени выборки в пределах временного окна. Альтернативно первая точка выборки может быть точкой выборки, соответствующей максимальному времени выборки в пределах временного окна, а последняя точка выборки может быть точкой выборки, соответствующей минимальному времени выборки в пределах временного окна.
[85] На ФИГ. 2 показано временное распределение точек выборки с 3T в качестве временного окна. Как показано на ФИГ. 2, в пределах этого временного окна находятся три точки выборки A, B и C. Среди них время выборки t2 точки выборки B представляет собой среднее время временного окна, и точка выборки A представляет собой первую точку выборки в пределах временного окна, а точка выборки B представляет собой последнюю точку выборки в пределах временного окна. Время выборки t1 точки выборки A наступает раньше, чем время выборки t3 точки выборки C.
[86] На шаге S102 положение первого устройства, соответствующего текущей точке выборки, является центральной точкой устройства отображения реальности, которое носит субъект. Происходит соединение центральной точки с первой точкой выборки и последней точкой выборки с помощью прямых линий соответственно, и эти две линии пересекаются с образованием второго прилежащего угла. Происходит вычисление угловой скорости между первой точкой выборки и последней точкой выборки согласно второму прилежащему углу и временному интервалу между первой точкой выборки и последней точкой выборки.
[87] На ФИГ. 3 показано пространственное распределение трех точек выборки, показанных на ФИГ. 2. Как показано на ФИГ. 3, точка B’ представляет собой первое положение, соответствующее точке выборки B, а линия AB’ пересекается с линией B’C, образуя прилежащий угол θ. Затем вычисляют угловую скорость между точкой выборки A и точкой выборки C согласно ω=θ/(t3-t1).
[88] В одном варианте осуществления пороговое значение заданной угловой скорости можно установить согласно опыту, например, 35°/с, и при этом вариант осуществления конкретно не является ограниченным.
[89] Шаг S103, составление карты траектории перемещения на основе второго временного ряда.
[90] В качестве одного необязательного варианта осуществления настоящего изобретения, из-за проблемы устройства отображения реальности, данные о положении субъекта можно не собирать в некоторые моменты времени выборки на шаге S101, таким образом, будет множество недействительных точек выборки, и множество точек выборки, полученных на шаге S101, могут быть прерывистыми.
[91] Следует понимать, что если данные пропущены, то окончательно полученная траектория перемещения будет сильно отклоняться от реальной ситуации, что не способствует последующему анализу данных. Таким образом, необходимо заполнить часть в виде промежутка следующим образом.
[92] Если временной интервал между двумя смежными точками выборки в первом временном ряду находится в пределах заданного интервала, заполняют данными в промежутке между двумя смежными точками выборки.
[93] В частности, две смежные точки выборки в первом временном ряду означают, что время выборки двух точек выборки является смежным. Нижнее предельное значение заданного интервала может быть T, а верхнее предельное значение может быть таким же, как интервальный параметр P устройства отображения реальности. Интервальный параметр получают на основе алгоритма смещения устройства отображения реальности, то есть, пока временной интервал между двумя смежными точками выборки во временном ряду представляет собой (T, P], точка выборки может быть вставлена между этими двумя смежными точками выборки.
[94] Необязательно заполнение точками выборки на линии, соединяющей две смежные точки выборки согласно первому интервалу. Первый интервал вычисляют согласно расстоянию между двумя смежными точками выборки и количеству недействительных точек выборки между двумя смежными точками выборки. Количество недействительных точек выборки вычисляют согласно временному интервалу между двумя смежными точками выборки и периоду выборки.
[95]Как показано на ФИГ. 4, происходят соединение точек выборки D и G в линию и вычисление первого интервала по формуле d=s/(n+1). В формуле s представляет собой линейное расстояние между точками выборки D и G, а n представляет собой количество недействительных точек выборки между точками выборки D и G. Известно, что временной интервал между двумя смежными точками выборки D и G представляет собой 3T, поэтому может быть известно, что между точками выборки D и G есть две недействительные точки выборки, то есть n=2. Согласно вычисленному первому интервалу d последовательно вставляют точки выборки E и F на линию DG. Расстояние между любыми двумя смежными точками выборки среди точек выборки D, E, F и G после заполнения данными представляет собой первый интервал d.
[96] Множество точек выборки после заполнения группируются согласно порядку времени выборки с помощью электронного устройства с получением первого временного ряда.
[97] Следует отметить, что если временной интервал между двумя смежными точками выборки в первом временном ряду равен T, это указывает на то, что между двумя смежными точками выборки нет недействительной точки выборки. Если временной интервал между двумя смежными точками выборки в первом временном ряду больше верхнего предела P заданного интервала, его следует рассматривать как контрольную точку останова без заполнения точками выборки.
[98] В качестве одного необязательного варианта осуществления настоящего изобретения, если две смежные точки смещения во втором временном ряду расположены слишком близко, это повлияет на создание последующей карты траектории перемещения, поэтому необходимо слить их. Аналогичным образом, по сравнению со способом определения расстояния смещения в вариантах осуществления настоящего изобретения применяют угловой коэффициент для определения степени отклонения субъекта, что позволяет эффективно исключить коэффициент высоты и может более точно определить степень отклонения точки смещения. Конкретный способ заключается в следующем.
[99] Если временной интервал между двумя смежными точками смещения во втором временном ряду меньше порогового значения первого временного интервала, определение того, является ли прилежащий угол между двумя соединительными линиями, соединяющими соответственно две смежные точки смещения со вторым положением, больше заданного порогового значения угла. Среди них второе положение представляет собой центральную точку устройства отображения реальности, соответствующую точке смещения с более поздним временем выборки в двух смежных точках смещения. Если да, слияние двух смежных точек смещения в новую точку смещения.
[100] Как показано на ФИГ. 5, для двух смежных точек смещения H и I во втором временном ряду время выборки t4 точки смещения H наступает раньше, чем время выборки t5 точки смещения I. Центральная точка I’ устройства отображения реальности, в которой находится субъект в точке смещения I, представляет собой второе положение. Прилежащий угол между двумя линиями, соединяющими соответственно центральную точку I’ с точками смещения H и I, равен α. Если α меньше порогового значения первого временного интервала, происходит слияние точек смещения H и I в новую точку смещения.
[101] Конкретный способ слияния может быть следующим: соединение точек смещения H и I и принятие средней точки J в качестве новой точки смещения, затем удаление точек смещения H и I. Время выборки t6 точки смещения J представляет собой среднее время из времени выборки t4 точки смещения H и времени выборки t5 точки смещения I.
[102] В этом варианте осуществления пороговое значение первого временного интервала может быть таким же, как интервальный параметр Р устройства отображения реальности.
[103] В качестве одного необязательного варианта осуществления настоящего изобретения, чтобы уменьшить объем данных и повысить эффективность составления, точки смещения с коротким временем пребывания можно отбросить. Кроме того, если субъект остается в одной точке смещения в течение более длительного времени, это указывает на то, что субъект больше заинтересован в этом месте. Интерес и удовлетворение пользователя являются целями изучения траектории перемещения субъекта, поэтому точки смещения с очень коротким временем пребывания можно отбросить. Конкретный способ заключается в следующем.
[104] Для любой из множества точек смещения принять любую из точек смещения в качестве текущей точки смещения. Если время пребывания субъекта в текущей точке смещения меньше порогового значения второго временного интервала, текущую точку смещения отбрасывают. Время пребывания субъекта в текущей точке смещения представляет собой временной интервал между временем выборки текущей точки смещения и временем выборки следующей точки смещения, которая находится во втором временном ряду и является смежной с текущей точкой смещения, а также имеет более позднее время выборки.
[105] В этом варианте осуществления пороговое значение второго временного интервала устанавливают согласно опыту, например, как 60 мс, и этим вариант осуществления конкретно не ограничивается.
[106] Следует отметить, что если точки смещения необходимо слить, их необходимо отбросить после слияния.
[107] В этом варианте осуществления карту траектории перемещения применяют для описания траектории перемещения субъекта в сцене виртуальной реальности или сцене смешанной реальности для анализа пространственно-временного поведения субъекта в сцене виртуальной реальности или сцене смешанной реальности, которая может содержать, без ограничения, карту маршрута смещения и термограмму траектории. При этом вариант осуществления конкретно не является ограниченным.
[108] Составление карты траектории перемещения на основе множества точек смещения описано ниже на примерах карты маршрута смещения и термограммы траектории.
[109] При составлении карты маршрута смещения через множество точек смещения сначала получают параметр отображения каждой точки смещения, затем создают карту маршрута смещения на основе параметра отображения каждой точки смещения. Каждая точка смещения отмечена одной и той же фигурой, например стрелкой. Параметр отображения представляет собой параметры цвета, направления и площади фигуры.
[110] Как показано на ФИГ. 6, направление стрелки применяют для указания на тенденцию перемещения субъекта, то есть всегда направлено от предыдущей точки смещения к текущей точке смещения, а время выборки предыдущей точки смещения наступает раньше, чем время выборки текущей точки смещения. Площадь стрелки положительно коррелирует со временем пребывания субъекта в текущей точке смещения, то есть, чем дольше время пребывания в текущей точке смещения, тем больше площадь стрелки. Например, площадь стрелки будет увеличиваться на 10% за каждую 1 с увеличения времени пребывания субъекта в текущей точке смещения. Цвет стрелки можно задать заранее, а цвет стрелки разных субъектов может быть разным, чтобы различать траекторию перемещения разных субъектов.
[111] Установив правила для вышеуказанных параметров отображения, можно более интуитивно наблюдать за траекториями перемещения разных субъектов и можно сравнивать между собой время пребывания каждого субъекта в каждой области сцены виртуальной реальности или сцены смешанной реальности, чтобы впоследствии проанализировать степень интереса субъектов.
[112] При составлении термограммы траектории через множество точек смещения сначала получают по меньшей мере одну область SOI в сцене виртуальной реальности или сцене смешанной реальности и подсчитывают количество точек смещения в по меньшей мере одной области SOI. Для любой из областей SOI происходит определение значения интенсивности цвета на основе времени пребывания субъекта в каждой точке смещения и количества точек смещения в единичной площади и составление термограммы траектории в текущей области SOI на основе значения интенсивности цвета. В частности, время пребывания субъекта в каждой точке смещения представляет собой временной интервал между временем выборки каждой точки смещения и временем выборки следующей точки смещения.
[113] Области SOI можно упорядочить на основе количества точек смещения в области и общего времени пребывания точек смещения в области. В частности, устанавливают стандарт оценки для количества точек смещения в области и общего времени пребывания точек смещения в области, и последовательность согласно оценке каждой области, а также значение интенсивности цвета области SOI с высокими оценками является высоким.
[114] Таким образом, значение интенсивности цвета области SOI с большим количеством точек смещения и/или более длительным временем пребывания точки смещения выше, чем таковое в других областях SOI. Согласно значению интенсивности цвета можно быстро определить путем наблюдения, к какой области SOI субъект проявляет больший интерес.
[115] В этом варианте осуществления карту маршрута смещения и термограмму траектории можно загрузить в качестве двухмерной или трехмерной карты.
[116] Следует отметить, что смежные отношения, описанные в вариантах осуществления настоящего изобретения, относятся к смежным отношениям в концепции времени, а не в концепции пространства.
[117] В качестве одного необязательного варианта осуществления настоящего изобретения после шага S103 также можно получить данные о перемещении глаз и/или данные о физиологических признаках субъекта в каждой точке смещения, и данные о перемещении глаз и/или данные о физиологических признаках каждой точки смещения отмечают на карте траектории перемещения. В частности, данные о физиологических признаках содержат по меньшей мере одно из электроэнцефалограммы (ЭЭГ), электромиографии (ЭМГ), частоты сердечных сокращений, артериального давления, пульса, температуры тела и частоты дыхания.
[118] Дополнительно при составлении термограммы траектории получают по меньшей мере одну область SOI сцены виртуальной реальности или сцены смешанной реальности. В это время происходит обработка точки смещения и/или данных о перемещении глаз, и/или данных о физиологических признаках в каждой области SOI с получением различных показателей оценки в каждой области SOI. Конкретный способ заключается в следующем.
[119] (1) Извлечение точки смещения в по меньшей мере одной области SOI и создание данных оценки доступа каждой области SOI. Нормализация количества доступов, общего времени пребывания и доли времени доступа в данных оценки доступа каждой области SOI, а затем вычисление показателя оценки доступа каждой области SOI на основе взвешенной суммы.
[120] Измерения количества доступов, общего времени пребывания и доли времени доступа различны, после нормализации (данные можно отобразить в диапазоне 0-1) получают показатель оценки доступа на основе взвешенной суммы. Чем выше значение показателя оценки доступа, тем выше степень взаимодействия между субъектом и областью SOI и тем выше привлекательность области SOI для субъекта.
[121] (2) Извлечение данных о перемещении глаз в по меньшей мере одной области SOI и создание данных оценки взгляда каждой области SOI. Нормализация общего времени продолжительности взгляда, количества взглядов и доли времени взгляда в данных оценки взгляда каждой области SOI, а затем вычисление показателя оценки взгляда каждой области SOI на основе взвешенной суммы.
[122] Измерения общего времени продолжительности взгляда, количества взглядов и доли времени взгляда различны, после нормализации (данные можно отобразить в диапазоне 0-1) получают показатель оценки взгляда на основе взвешенной суммы. Чем выше значение показателя оценки взгляда, тем выше степень взаимодействия между субъектом и областью SOI и тем выше привлекательность области SOI для субъекта.
[123] (3) Извлечение данных о физиологических признаках в по меньшей мере одной области SOI и создание данных оценки изменения физиологических признаков каждой области SOI. Нормализация данных оценки изменения физиологических признаков каждой области SOI, а затем вычисление показателя оценки изменения физиологических признаков каждой области SOI на основе взвешенной суммы.
[124] Взяв в качестве примеров ЭЭГ и частоту дыхания, стандартное отклонение сигнала ЭЭГ и частоты дыхания можно применять в качестве данных об изменении ЭЭГ и данных об изменении частоты дыхания, после нормализации (данные можно отобразить в диапазоне 0-1) получают показатель оценки изменения физиологических признаков. Чем выше значение показателя оценки изменения физиологических признаков, тем выше степень стимуляции области SOI к эмоциям субъекта, то есть тем выше привлекательность области SOI для субъекта.
[125] В этом необязательном варианте осуществления данные оценки доступа, данные оценки взгляда и/или данные оценки изменения физиологических признаков каждой области SOI применяют в качестве элементов оценки для связи с набором показателей оценки каждой области SOI с получением соответствующих результатов оценки.
[126] Как показано на ФИГ. 7, в вариантах осуществления настоящего изобретения дополнительно предоставлен аппарат для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, как правило, содержащий:
[127] модуль 201 получения точки выборки, выполненный для получения первого временного ряда, содержащего множество точек выборки, которые являются точками проекции устройства отображения реальности;
[128] модуль 202 получения точки смещения, выполненный для: принятия любой из множества точек выборки в качестве текущей точки выборки; установки временного окна на основе времени выборки текущей точки выборки и нахождения первой точки выборки и последней точки выборки в пределах временного окна; принятия первого положения в качестве центра круга, который является центральной точкой устройства отображения реальности, соответствующей текущей точке выборки, и вычисления угловой скорости между первой точкой выборки и последней точкой выборки; если угловая скорость больше порогового значения заданной угловой скорости, принятия текущей точки выборки в качестве точки смещения; обработки множества точек выборки, как описано выше, с получением второго временного ряда, содержащего множество точек смещения; и
[129] модуль 203 составления, выполненный для составления карты траектории перемещения на основе второго временного ряда.
[130] В качестве одного необязательного варианта осуществления настоящего изобретения среднее время временного окна является временем выборки текущей точки выборки. Временное окно содержит моменты времени выборки, соответствующие по меньшей мере трем точкам выборки.
[131] В качестве одного необязательного варианта осуществления настоящего изобретения аппарат дополнительно содержит модуль заполнения, выполненный для того, чтобы: для любой из множества точек выборки, перед установкой временного окна на основе времени выборки текущей точки выборки, если временной интервал между двумя смежными точками выборки в первом временном ряду находится в пределах заданного интервала, заполнять данными в промежутке между двумя смежными точками выборки.
[132] В качестве одного необязательного варианта осуществления настоящего изобретения модуль заполнения выполнен для заполнения точками выборки на линии, соединяющей две смежные точки выборки согласно первому интервалу. Первый интервал вычисляют согласно расстоянию между двумя смежными точками выборки и количеству недействительных точек выборки между двумя смежными точками выборки. Количество недействительных точек выборки вычисляют согласно временному интервалу между двумя смежными точками выборки и периоду выборки.
[133] В качестве одного необязательного варианта осуществления настоящего изобретения аппарат дополнительно содержит модуль слияния, выполненный для того, чтобы перед составлением карты траектории перемещения на основе множества точек смещения, если временной интервал между двумя смежными точками смещения во втором временном ряду меньше порогового значения первого временного интервала, определять, что прилежащий угол между двумя соединительными линиями, соответственно соединяющими две смежные точки смещения со вторым положением, больше порогового значения заданного угла. Среди них второе положение представляет собой центральную точку устройства отображения реальности, соответствующую точке смещения с более поздним временем выборки в двух смежных точках смещения; если да, то слияние двух смежных точек смещения в новую точку смещения.
[134] В качестве одного необязательного варианта осуществления настоящего изобретения аппарат дополнительно содержит модуль отбрасывания, выполненный для того, чтобы перед составлением карты траектории перемещения на основе множества точек смещения, для любой из множества точек смещения, если время пребывания субъекта в текущей точке смещения меньше порогового значения второго временного интервала, отбросить текущую точку смещения. Время пребывания субъекта в текущей точке смещения представляет собой временной интервал между временем выборки текущей точки смещения и временем выборки следующей точки смещения.
[135] В качестве одного необязательного варианта осуществления настоящего изобретения карта траектории перемещения включает карту маршрута перемещения. Модуль 203 составления, в частности, выполнен для получения параметра отображения каждой точки смещения, включая цвет, направление и площадь. В частности, указывается направление от предыдущей точки смещения к текущей точке смещения; площадь положительно коррелирует со временем пребывания субъекта в текущей точке смещения; время пребывания субъекта в текущей точке смещения представляет собой временной интервал между временем выборки текущей точки смещения и временем выборки следующей точки смещения. Создание карты траектории перемещения на основе параметра отображения каждой точки смещения.
[136] В качестве одного необязательного варианта осуществления настоящего изобретения карта траектории перемещения включает термограмму траектории. Модуль 203 составления, в частности, выполнен для получения по меньшей мере одной области SOI и подсчета количества точек смещения в по меньшей мере одной области SOI. Для любой из областей SOI определение значения интенсивности цвета на основе времени пребывания каждой точки смещения и количества точек смещения в единичной площади, а также составление термограммы траектории в текущей области SOI на основе значения интенсивности цвета. В частности, время пребывания субъекта в каждой точке смещения представляет собой временной интервал между временем выборки каждой точки смещения и временем выборки следующей точки смещения.
[137] В качестве одного необязательного варианта осуществления настоящего изобретения после составления карты траектории перемещения на основе множества точек смещения аппарат дополнительно содержит модуль отметки, выполненный для получения данных о перемещении глаз и/или данных о физиологических признаках субъекта в каждой точке смещения и отметки данных о перемещении глаз и/или данных о физиологических признаках каждой точки смещения на карте траектории перемещения. В частности, данные о физиологических признаках содержат по меньшей мере одно из электроэнцефалограммы (ЭЭГ), электромиографии (ЭМГ), частоты сердечных сокращений, артериального давления, пульса, температуры тела и частоты дыхания.
[138] Необязательный вариант осуществления также содержит:
[139] модуль получения области SOI, выполненный для получения по меньшей мере одной области SOI;
[140] первый модуль извлечения, выполненный для: извлечения точки смещения в по меньшей мере одной области SOI и создания данных оценки доступа каждой области SOI; нормализации количества доступов, общего времени пребывания и доли времени доступа в данных оценки доступа каждой области SOI, а затем вычисления показателя оценки доступа каждой области SOI на основе взвешенной суммы; и/или
[141] второй модуль извлечения, выполненный для: извлечения данных о перемещении глаз в по меньшей мере одной области SOI и создания данных оценки взгляда каждой области SOI; нормализации общего времени продолжительности взгляда, количества взглядов и доли времени взгляда в данных оценки взгляда каждой области SOI, а затем вычисления показателя оценки взгляда каждой области SOI на основе взвешенной суммы; и/или
[142] третий модуль извлечения, выполненный для: извлечения данных о физиологических признаках в по меньшей мере одной области SOI и создания данных оценки изменения физиологических признаков каждой области SOI; нормализации данных оценки изменения физиологических признаков каждой области SOI, а затем вычисления показателя оценки изменения физиологических признаков каждой области SOI на основе взвешенной суммы.
[143] В одном варианте осуществления блок в любом из описанных выше аппаратов может представлять собой одну или более интегральных схем, выполненных с возможностью осуществления описанного выше способа. Например, одну или более специализированных интегральных схем (ASIC), или один или более процессоров обработки цифровых сигналов (DSP), или одну или более программируемых пользователем вентильных матриц (FPGA), или комбинацию из по меньшей мере двух этих видов интегральных схем.
[144] В качестве другого примера блок в аппарате можно внедрить в виде планировщика элемента обработки, который может быть процессором общего назначения, например, центральным процессором (ЦП) или другими процессорами, которые могут вызывать программу. В другом примере эти блоки можно интегрировать вместе и внедрять в виде системы на кристалле (SOC).
[145] В настоящей заявке называются различные возможные сообщения/информация/устройства/элементы сети/системы/аппараты/действия/ операции/процессы/концепции и другие виды объектов. Следует понимать, что эти конкретные названия не являются ограничивающими для связанных с ними объектов и могут быть изменены с учетом таких факторов, как сцена, контекст или привычка применения. Понимание технического значения технического термина в настоящей заявке должно определяться главным образом функцией и техническим эффектом, воплощенными/внедренными в техническое решение.
[146] Специалисты в данной области техники могут ясно понять, что для удобного и простого описания конкретные рабочие процессы систем, аппаратов и блоков, описанных выше, могут относиться к соответствующему процессу в приведенных выше вариантах осуществления способа и не будут повторяться в настоящем документе.
[147] Следует понимать, что в нескольких вариантах осуществления согласно настоящему изобретению раскрытые систему, устройство и способ можно воплотить другими способами. Например, описанный выше вариант осуществления аппарата является лишь иллюстративным. Например, разделение блока представляет собой только логическое функциональное разделение, и в фактическом осуществлении может быть другой способ разделения, например, множество блоков или компонентов могут быть объединены или интегрированы в другую систему, или некоторые функции могут быть проигнорированы или не осуществлены. Кроме того, показанная или обсуждаемая взаимная связь, прямая связь или коммуникационное соединение может быть косвенной связью или коммуникационным соединением с помощью некоторых интерфейсов, устройств или блоков и может быть электрической, механической или других видов.
[148] Блоки для отдельного описания компонентов могут быть или не быть физически разделенными, и компоненты, отображаемые как блок, могут быть или не быть физическим блоком, то есть они могут располагаться в одном месте или распределяться во множестве сетевых блоков. Некоторые или все блоки можно выбрать согласно фактической необходимости для достижения цели вариантов осуществления.
[149] Это может быть реализовано специалистами в данной области техники, блоки и шаги алгоритма каждого примера, описанного в сочетании с раскрытыми в настоящем документе вариантами осуществления, могут быть реализованы с помощью электронного аппаратного обеспечения или комбинации компьютерного программного обеспечения и электронного аппаратного обеспечения. Осуществляют ли эти функции с помощью аппаратного обеспечения или программного обеспечения, зависит от конкретного применения и конструктивного ограничения технического решения. Для каждого конкретного применения профессиональным техническим специалистом можно применять разные способы для реализации описанных функций, но такое осуществление не должно рассматриваться как выходящее за рамки настоящего изобретения.
[150] Следует также понимать, что такие реляционные термины, как первый и второй, применяются только для отличия одного объекта или операции от другого объекта или операции, и не обязательно требуют или подразумевают какую-либо фактическую связь или порядок между этими объектами или операциями. Термины «включающий», «содержащий» и любые другие их варианты, содержащие неисключающее включение, относятся к тому, что процесс, способ, изделие или устройство, содержащее ряд элементов, содержит не только эти элементы, но также и другие элементы, не перечисленные явно, или дополнительно содержит элементы, присущие этому процессу, способу, изделию или устройству.
[151] Следует понимать, что в каждом варианте осуществления настоящего изобретения, если нет специального описания и логического конфликта, термины и/или описания разных вариантов осуществления являются согласованными и могут перекрестно ссылаться друг на друга. Технические признаки в разных вариантах осуществления могут объединяться для образования новых вариантов осуществления согласно их внутренней логической взаимосвязи.
[152] Как показано на ФИГ. 8, в вариантах осуществления настоящего изобретения дополнительно предоставлено электронное устройство 300, которое содержит память 301, процессор 302 и главную линию 303 связи.
[153] Память 301 может быть выполнена для хранения команды, программы, кода, набора кодов или набора команд и может содержать область хранения программы и область хранения данных. В частности, область хранения программы может хранить команду для осуществления операционной системы, команду для реализации по меньшей мере одной функции, команду для осуществления способа сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения согласно вышеупомянутым вариантам осуществления и т.д. В области хранения данных могут храниться данные, включенные в способ сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения согласно вышеупомянутым вариантам осуществления и т.д.
[154] Процессор 302 может содержать одно или более ядер обработки и вызывает данные, хранящиеся в памяти 301, а также исполняет различные функции и обрабатывает данные настоящего изобретения посредством запуска или исполнения команды, программы, набора кодов или набора команд, хранящихся в памяти 301. Процессор 302 может быть по меньшей мере одним из специализированной интегральной схемы (ASIC), цифрового сигнального процессора (DSP), устройства цифровой обработки сигналов (DSPD), программируемого логического устройства (PLD), программируемой пользователем вентильной матрицы (FPGA), центрального процессора (ЦП), контроллера, микроконтроллера и микропроцессора. Следует понимать, что для разных устройств электронные устройства, применяемые для реализации функций процессора 302, также могут быть другими, и этим вариант осуществления конкретно не ограничен.
[155] Главная линия 303 связи может дополнительно предусматривать доступ для передачи информации между вышеупомянутыми компонентами и может быть главной линией соединения между собой периферийных компонентов (PCI), главной линией расширенной промышленной стандартной архитектуры (EISA) и т.д. Главная линия 303 связи может разделяться на адресную главную линию, главную линию данных, главную линию управления и т.д. Для удобства представления только одну двойную стрелку применяют на ФИГ. 3, но это не означает, что существует только одна главная линия или один тип главной линии.
[156] В частности, электронное устройство 300 содержит, без ограничения, мобильный телефон, ноутбук, цифровой радиоприемник, ПЦП (персональный цифровой помощник), ППК (планшетный персональный компьютер), ПМП (портативный мультимедийный проигрыватель), автомобильный терминал (например, автомобильный навигационный терминал) и т.д., и стационарный терминал, например, цифровое телевидение, настольный компьютер и т.д., а также сервер и т.д. Электронное устройство 300, показанное на ФИГ. 8, представляет собой лишь пример и не ограничивает функции и область применения вариантов осуществления настоящего изобретения.
[157] Как показано на ФИГ. 9, варианты осуществления в настоящей заявке также обеспечивают систему для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, содержащую устройство 400 отображения реальности и электронное устройство 300. В частности, устройство 400 отображения реальности выполнено для сбора данных о координатах точки проекции устройства 400 отображения реальности на основе заданной частоты выборки и отправки данных о положении на электронное устройство 300.
[158] Электронное устройство 300 выполнено для: получения координат точки проекции устройства 400 отображения реальности и создания первого временного ряда, содержащего множество точек выборки, на основе координат точки проекции устройства 400 отображения реальности; для любой из множества точек выборки - установки временного окна на основе времени выборки текущей точки выборки и нахождения первой точки выборки и последней точки выборки в пределах временного окна; принятия первого положения в качестве центра круга, который является центральной точкой устройства отображения реальности, соответствующей текущей точке выборки, и вычисления угловой скорости между первой точкой выборки и последней точкой выборки; если угловая скорость больше порогового значения заданной угловой скорости, принятия текущей точки выборки в качестве точки смещения; обработки множества точек выборки, как описано выше, с получением второго временного ряда, содержащего множество точек смещения; составления и отображения карты траектории перемещения в сцене виртуальной реальности или сцене смешанной реальности на основе множества точек смещения.
[159] На основе множества точек выборки, указывающих на положение субъекта, оценивают каждую точку выборки путем установки временного окна, угловой скорости и других параметров, и быстро удаляют точку выборки с небольшим отклонением, а также отсеивают точку смещения, соответствующую требованию, затем составляют карту траектории перемещения через точку смещения. Таким образом, можно не только повысить эффективность составления, но и четко описать траекторию перемещения субъекта в сцене виртуальной реальности или сцене смешанной реальности, чтобы всесторонне, полностью и систематически записать пространственную информацию субъекта, перемещающегося в сцене виртуальной реальности или сцене смешанной реальности, и обеспечить поддержку данных для последующего анализа пространственно-временных данных, чтобы проанализировать удовлетворенность пользователя в сцене виртуальной реальности или сцене смешанной реальности.
[160] Техническое решение настоящего изобретения по существу, или часть, способствующая существующей технологии, или часть технического решения может быть воплощена в виде продуктов программного обеспечения. Компьютерный продукт программного обеспечения хранится на машиночитаемом носителе данных, включая ряд команд, позволяющих компьютерному устройству (может быть персональный компьютер, сервер или сетевое устройство и т.д.) исполнять все или часть шагов способа, описанного в каждом варианте осуществления настоящего изобретения. Однако упомянутый выше машиночитаемый носитель данных содержит: u-диск, мобильный жесткий диск, постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), магнитный диск или диск и другие различные носители, которые могут хранить программный код.
[161] Все примеры конкретных вариантов осуществления являются лучшими примерами настоящего изобретения и не ограничивают объем охраны настоящего изобретения. Следовательно, эквивалентные изменения, внесенные согласно структуре, форме и принципу настоящего изобретения, должны подпадать под объем охраны настоящего изобретения.
Настоящее изобретение относится к способу, а также аппарату, устройству, системе и носителю данных для получения и создания траектории пространственно-временного перемещения. Способ включает: получение первого временного ряда, содержащего множество точек выборки, где точки выборки являются точками проекции устройства отображения реальности; для любой точки выборки установку временного окна на основе момента выборки текущей точки выборки, нахождение первой точки выборки и последней точки выборки во временном окне; принятие первого положения, которое является центральной точкой устройства отображения реальности, соответствующей текущей точке выборки, в качестве центра круга, вычисление угловой скорости между первой точкой выборки и последней точкой выборки и применение текущей точки выборки в качестве точки смещения, если угловая скорость больше заданного порогового значения угловой скорости; исполнение упомянутого выше процесса относительно множества точек выборки с получением второго временного ряда, содержащего множество точек смещения; и составление карты траектории перемещения на основе второго временного ряда. Настоящее изобретение может всесторонне, полностью и систематически записывать информацию о времени и пространстве перемещения тела человека в сцене виртуальной реальности или смешанной реальности. 5 н. и 9 з.п. ф-лы, 9 ил.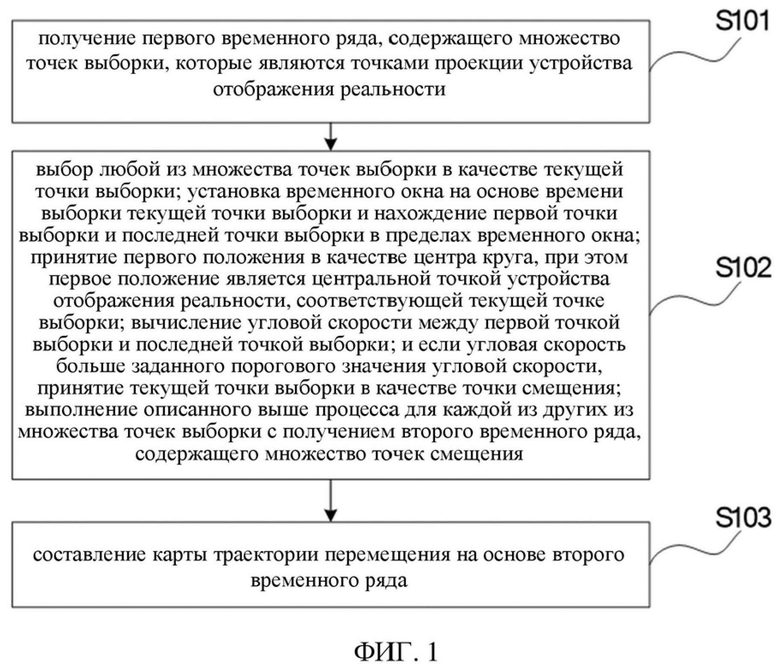
1. Способ сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, способ, выполняемый электронным устройством, отличающийся тем, что включает:
получение первого временного ряда, содержащего множество точек выборки субъекта, при этом множество точек выборки являются точками проекции устройства отображения реальности, а субъект является целевым субъектом, действующим в сцене виртуальной реальности или смешанной реальности;
выбор любой из множества точек выборки субъекта в качестве текущей точки выборки; установку временного окна на основе времени выборки текущей точки выборки и нахождение первой точки выборки и последней точки выборки в пределах временного окна; принятие первого положения в качестве центра круга, при этом первое положение является центральной точкой устройства отображения реальности, соответствующей текущей точке выборки; вычисление угловой скорости между первой точкой выборки и последней точкой выборки; и если угловая скорость больше заданного порогового значения угловой скорости, принятие текущей точки выборки в качестве точки смещения;
выполнение описанного выше процесса для каждой из других из множества точек выборки субъекта с получением второго временного ряда, содержащего множество точек смещения; и
составление карты траектории перемещения субъекта на основе второго временного ряда.
2. Способ по п. 1, в котором среднее время временного окна является временем выборки текущей точки выборки, и временное окно содержит моменты времени выборки, соответствующие по меньшей мере трем точкам выборки.
3. Способ по п. 1 или 2, в котором перед установкой временного окна на основе времени выборки текущей точки выборки способ дополнительно включает:
если временной интервал между двумя смежными точками выборки в первом временном ряду находится в пределах заданного интервала, заполнение данными в промежутке между двумя смежными точками выборки.
4. Способ по п. 3, в котором заполнение данными в промежутке между двумя смежными точками выборки включает:
заполнение точек выборки на линии, соединяющей две смежные точки выборки, в первом интервале; первый интервал вычисляют на основе расстояния между двумя смежными точками выборки и количества недействительных точек выборки между двумя смежными точками выборки; количество недействительных точек выборки вычисляют на основе временного интервала между двумя смежными точками выборки и периода выборки.
5. Способ по п. 1 или 2, в котором перед составлением карты траектории перемещения субъекта на основе второго временного ряда способ дополнительно включает:
если временной интервал между двумя смежными точками смещения во втором временном ряду меньше порогового значения первого временного интервала, определение того, является ли прилежащий угол между двумя соединительными линиями, соответственно соединяющими две смежные точки смещения со вторым положение, не больше заданного порогового значения угла; при этом второе положение является центральной точкой устройства отображения реальности, соответствующей точке смещения с более поздним временем выборки в двух смежных точках смещения;
если прилежащий угол между двумя соединительными линиями, соответственно соединяющими две смежные точки смещения со вторым положением, не больше заданного порогового значения угла, слияние двух смежных точек смещения в новую точку смещения.
6. Способ по п. 1 или 2, в котором перед составлением карты траектории перемещения субъекта на основе второго временного ряда способ дополнительно включает:
принятие любой из множества точек смещения в качестве текущей точки смещения; если время пребывания, в течение которого субъект находится в текущей точке смещения, меньше порогового значения второго временного интервала, отбрасывание текущей точки смещения; время пребывания, в течение которого субъект находится в текущей точке смещения, представляет собой временной интервал между временем выборки текущей точки смещения и временем выборки следующей точки смещения.
7. Способ по п. 1 или 2, в котором карта траектории перемещения содержит карту маршрута перемещения; составление карты траектории перемещения субъекта на основе множества точек смещения включает:
получение параметра отображения каждой из множества точек смещения, при этом параметр отображения содержит цвет, направление и площадь, направление указывается от предыдущей точки смещения к текущей точке смещения, площадь положительно коррелирует с временем пребывания, в течение которого субъект находится в текущей точке смещения; время пребывания, в течение которого субъект находится в текущей точке смещения, представляет собой временной интервал между временем выборки текущей точки смещения и временем выборки следующей точки смещения;
создание карты маршрута смещения на основе параметра отображения каждой из множества точек смещения.
8. Способ по п. 1 или 2, в котором карта траектории перемещения содержит термограмму траектории; составление карты траектории перемещения субъекта на основе множества точек смещения включает:
получение по меньшей мере одного сигнала интереса (SOI) области и подсчет количества точек смещения в по меньшей мере одной области SOI;
для любой из областей SOI определение значения интенсивности цвета на основе времени пребывания, в течение которого субъект находится в каждой из множества точек смещения, и количества точек смещения в единичной площади, и составление термограммы траектории в текущей области SOI на основе значения интенсивности цвета; при этом время пребывания субъекта в каждой точке смещения представляет собой временной интервал между временем выборки каждой из множества точек смещения и временем выборки следующей точки смещения.
9. Способ по п. 1 или 2, в котором после составления карты траектории перемещения субъекта на основе множества точек смещения способ дополнительно включает:
получение данных о перемещении глаз и/или данных о физиологических признаках субъекта в каждой из множества точек смещения и отметку данных о перемещении глаз и/или данных о физиологических признаках каждой из множества точек смещения на карте траектории перемещения;
при этом данные о физиологических признаках содержат по меньшей мере одно из электроэнцефалограммы (ЭЭГ), электромиографии (ЭМГ), частоты сердечных сокращений, артериального давления, пульса, температуры тела и частоты дыхания.
10. Способ по п. 9, дополнительно включающий:
получение по меньшей мере одного сигнала интереса (SOI) области;
извлечение точки смещения в по меньшей мере одной области SOI, создание данных оценки доступа каждой области SOI; нормализацию количества доступов, общего времени пребывания и доли времени доступа в данных оценки доступа каждой области SOI, и вычисление показателя оценки доступа каждой области SOI на основе взвешенной суммы; и/или
извлечение данных о перемещении глаз в по меньшей мере одной области SOI и создание данных оценки взгляда каждой области SOI, нормализацию общего времени продолжительности взгляда, количества взглядов и доли времени взгляда в данных оценки взгляда каждой области SOI, и вычисление показателя оценки взгляда каждой области SOI на основе взвешенной суммы; и/или
извлечение данных о физиологических признаках в по меньшей мере одной области SOI, создание данных оценки изменения физиологических признаков каждой области SOI; нормализацию данных оценки изменения физиологических признаков каждой области SOI, и вычисление показателя оценки изменения физиологических признаков каждой области SOI на основе взвешенной суммы.
11. Аппарат для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, отличающийся тем, что содержит:
модуль получения точки выборки, выполненный для получения первого временного ряда, содержащего множество точек выборки субъекта, при этом множество точек выборки представляют собой точки проекции устройства отображения реальности, а субъект является целевым субъектом, действующим в сцене виртуальной реальности или смешанной реальности;
модуль получения точки смещения, выполненный для выбора любой из множества точек выборки субъекта в качестве текущей точки выборки; установки временного окна на основе времени выборки текущей точки выборки, и нахождения первой точки выборки и последней точки выборки в пределах временного окна; принятия первого положения в качестве центра круга, при этом первое положение является центральной точкой устройства отображения реальности, соответствующей текущей точке выборки; вычисления угловой скорости между первой точкой выборки и последней точкой выборки; и если угловая скорость больше заданного порогового значения угловой скорости, принятия текущей точки выборки в качестве точки смещения; выполнения описанного выше процесса для каждой из других из множества точек выборки субъекта с получением второго временного ряда, содержащего множество точек смещения; и
модуль составления, выполненный для составления карты траектории перемещения субъекта на основе второго временного ряда.
12. Электронное устройство для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, содержащее память и процессор, отличающееся тем, что в памяти хранится компьютерная программа, которая сконфигурирована для загрузки процессором с целью осуществления способа по любому из пп. 1–10.
13. Система для сбора данных о пространственно-временном поведении и создания траектории пространственно-временного поведения, отличающаяся тем, что содержит устройство отображения реальности и электронное устройство по п. 12, при этом
устройство отображения реальности выполнено для сбора данных о координатах точки проекции устройства отображения реальности на основе заданной частоты выборки и отправки координат точки проекции устройства отображения реальности на электронное устройство;
электронное устройство выполнено для получения координат точки проекции устройства отображения реальности и создания первого временного ряда, содержащего множество точек выборки субъекта, на основе координат точки проекции устройства отображения реальности.
14. Машиночитаемый носитель данных с хранящейся на нем компьютерной программой, отличающийся тем, что компьютерная программа сконфигурирована для загрузки процессором и предназначена для осуществления способа по любому из пп. 1–10.
| CN 111265225 A, 12.06.2020 | |||
| CN 106123893 A, 16.11.2016 | |||
| CN 109271030 A, 25.01.2019 | |||
| CN 106681484 A, 17.05.2017. |

