Область техники
Настоящее изобретение относится к области механизмов для переключателей, в частности, переключателей, предназначенных для реализации нескольких положений и предотвращения нежелательных конфигураций соответствующих контактов, которые могут приводить к коротким замыканиям, в результате чего может происходить повреждение приводных двигателей. Таким образом, настоящее изобретение находит предпочтительное применение в области реверсивных приводных двигателей для штор.
Уровень техники
Существуют известные механизмы для переключателей, основу которых составляют два качающихся подвижных контакта, которые также обычно монтируют рядом друг с другом, причем они качаются относительно общей оси, таким образом, что каждый из подвижных контактов может качаться между двумя концевыми положениями. Указанные концевые положения определены соответствующими фиксированными контактами, к которым присоединены впускные/выпускные выводы переключателя.
Подвижные контакты движутся посредством двух приводных рычагов, также называемых термином «качающиеся рычаги», по одному рычагу для каждого подвижного контакта. Указанные рычаги могут, в свою очередь, поворачиваться вокруг общего вала, расположенного параллельно по отношению к оси подвижных контактов.
Каждый рычаг имеет приводной конец, который расположен на удалении от вала вращения рычага и механически соединен с соответствующим подвижным контактом. Это механическое соединение осуществлено посредством пружины, которая размещена в обычно полом корпусе рычага и имеет один конец, расположенный на опоре внутри рычага, и другой конец, расположенный на опоре края подвижного контакта.
Поскольку присутствуют две пары, которые образуют рычаг и подвижный контакт, при отсутствии механического соединения между рычагами, существуют четыре возможных конфигурации.
Когда указанные переключатели использованы для приведения в действие реверсивных двигателей, например, в целях подъема и опускания штор или в целях выдвижения и втягивания тентов, представляют интерес только три из четырех конфигураций. Четвертая конфигурация соответствует состоянию короткого замыкания, которое должно быть предотвращено. Механизм должен запрещать эту конфигурацию.
Для разрешения трех рабочих конфигураций и одновременного запрещения конфигурации короткого замыкания в технике известно введение механизма между рычагами, который запрещает вышеупомянутую конфигурацию.
Однако известные механизмы являются сложными, потому что они содержат большое число деталей.
Краткое раскрытие настоящего изобретения
Для преодоления упомянутых недостатков и достижения указанной цели согласно настоящему изобретению предложен механизм для переключателей, который содержит два качающихся подвижных контакта, качающихся согласно оси вращения, таким образом, что каждый из подвижных контактов может качаться между двумя концевыми положениями и содержит первый и второй качающиеся приводные рычаги, по одному рычагу для каждого подвижного контакта, причем рычаги способны поворачиваться вокруг общего вала, и при этом в каждом рычаге определен приводной конец, причем приводной конец предназначен для непосредственного и/или косвенного толкания подвижных контактов в толчковой области для толкания подвижных контактов, таким образом, что определены положительное и отрицательное направления поворота рычагов, при этом первый рычаг содержит опорную поверхность, и второй рычаг содержит опорную поверхность, предназначенную для опоры на опорную поверхность первого рычага, причем поверхности имеют такую ориентацию, что их взаимная опора может производить момент, действующий на рычаги по отношению к общему валу, и при этом:
- первый рычаг вызывает поворот второго рычага при повороте согласно одному направлению, и когда опорные поверхности вступают в контакт друг с другом; и
- первый рычаг представляет собой ограничитель для остановки поворота второго рычага, когда второй рычаг поворачивается согласно противоположный направление вращения.
Таким образом, настоящее изобретение заключается в непосредственном соединении рычагов друг с другом. Это уменьшает сложность механизмов и их стоимость, а также обеспечивает более высокую надежность.
Кроме того, указанные признаки могут быть произведены в течение изготовления рычагов. Настоящее изобретение также может быть реализовано в конструкции с единственным рычагом.
Согласно некоторым вариантам осуществления каждый рычаг изготовлен из стержня, соединяющего приводной конец с общим валом.
Согласно некоторым вариантам осуществления каждый рычаг содержит два противоположных удлинения по отношению к общему валу, которые являются перпендикулярными по отношению к стержню, причем указанные удлинения содержат концы, находящиеся на верхней стороне с создающими давление поверхностями предназначенный для приведения в действие рычагов.
Согласно некоторым вариантам осуществления каждый рычаг содержит две опорных поверхности, предназначенные для опоры на опорную поверхность другого рычага, причем две поверхности каждого из рычагов расположены напротив друг друга по отношению к общему валу.
В результате того, что силы сделаны симметричными, чистый момент достигается без приложения каких-либо сил к валу.
Согласно некоторым вариантам осуществления каждый рычаг содержит в одном из удлинений выступ, проходящий согласно направлению общего вала и к другому рычагу, причем этот выступ содержит одну из опорных поверхностей, и при этом другое удлинение каждого рычага содержит другую опорную поверхность для соответствующего выступа.
В этом заключается симметричный способ осуществления настоящего изобретения, который допускает изготовление двух рычагов одной конструкции.
Согласно некоторым вариантам осуществления создающие давление поверхности имеют клинообразное сечение, таким образом, что их составляют две наклонные плоскости, определяющие вогнутость.
Согласно некоторым вариантам осуществления приводной конец каждого рычага изготовлен в форме U-образных пазов, в которые плотно входят толчковые области для толкания подвижных контактов.
Согласно некоторым вариантам осуществления механизм содержит стабилизирующие пружины для стабилизации сборок рычагов и подвижных контактов, причем стержни рычагов на приводном конце содержат полость, в которой размещается пружина.
Согласно некоторым вариантам осуществления подвижные контакты имеют общую ось вращения.
Согласно некоторым вариантам осуществления подвижные контакты составляют два сегмента, причем первый толчковый или приводной сегмент, который толкает или приводит в действие соответствующий рычаг, и который содержит выступ для совмещения с концом пружины, расположенной в полости приводного конца рычага, и второй контактный сегмент содержит язычок, который содержит на своем конце контактную точку.
Согласно некоторым вариантам осуществления подвижные контакты расположены по отношению друг к другу таким образом, что их приводные сегменты расположены рядом, и при этом их контактные сегменты находятся в большей степени снаружи.
Согласно некоторым вариантам осуществления механизм содержит главный вывод, первый вывод и второй вывод, которые представляют собой плату, расположенную на одном конце с соединительным штырем, причем на конце, противоположном по отношению к соединительному штырю, главный вывод содержит полоску, у которой вершину клинообразного сечения составляет общая ось вращения подвижных контактов, таким образом, что в полоске определены опорный сегмент для первого подвижного контакта и опорный сегмент для второго подвижного контакта.
Согласно некоторым вариантам осуществления первый вывод расположен напротив главного вывода по отношению к оси вращения первого подвижного контакта, причем второй вывод расположен напротив опорного сегмента для второго подвижного контакта и рядом с главным выводом, первый вывод содержит контактную точку, второй вывод содержит контактную точку, таким образом, что в результате опорных поверхностей рычагов, оказываются допустимыми только следующие конфигурации:
- первая конфигурация, в которой первый подвижный контакт не находится в соединении с контактной точкой первого вывода, и при этом второй подвижный контакт не находится в соединении с контактной точкой второго вывода, таким образом, что соединительный штырь главного вывода является электрически изолированным от соединительных выводов первого вывода и второй вывод;
- вторая конфигурация, в которой первый подвижный контакт находится в соединении с контактной точкой первого вывода, и при этом второй подвижный контакт не находится в соединении с контактной точкой второго вывода, таким образом, что соединительный штырь главного вывода находится в электрическом контакте с соединительным штырем первого вывода; и
- третья конфигурация, в которой первый подвижный контакт не находится в соединении с контактной точкой первого вывода, и при этом второй подвижный контакт находится в соединении с контактной точкой второго вывода, таким образом, что соединительный штырь главного вывода находится в электрическом контакте с соединительным штырем второго вывода;
причем оказывается невозможной конфигурация, в которой первый подвижный контакт находится в соединении с контактной точкой первого вывода, и при этом второй подвижный контакт находится в соединении с контактной точкой второго вывода.
Согласно некоторым вариантам осуществления поверхности для взаимной опоры рычагов расположены таким образом, что когда они вступают в контакт друг с другом, главные оси стержней двух рычагов образуют угол, предпочтительно составляющий 3° или более.
Согласно некоторым вариантам осуществления механизм содержит три кнопки или нажимные кнопки:
- первую кнопку, которая содержит создающий давление конец для приложения давления к создающей давление поверхности первого рычага, что приводит ко второй конфигурации;
- вторую кнопку, которая содержит создающий давление конец для приложения давления к создающей давление поверхности второго рычага, что приводит к третьей конфигурации; и
- третью кнопку, которая содержит два создающих давление конца для одновременного приложения давления к создающим давление поверхностям первого рычага и второго рычага, что приводит к первой конфигурации.
Наконец, настоящее изобретение относится к системе для приведения в действие штор, содержащей реверсивный двигатель, содержащий три штыря и механизм согласно любому из вариантов осуществления, таким образом, что двигатель может находиться только в следующих режимах:
режим эксплуатации сдвижением вперед;
режим эксплуатации сдвижением назад; и
режим без снабжения энергией,
при этом предотвращается короткое замыкание.
Краткое описание фигур
В целях дополнения описания и обеспечения лучшего понимания настоящего изобретения представлен ряд фигур. Указанные фигуры составляют неотъемлемую часть описания и иллюстрируют варианты осуществления настоящего изобретения, которые следует истолковывать не в качестве ограничения объема настоящего изобретения, но лишь в качестве примерного способа возможного осуществления настоящего изобретения. В число иллюстраций входят следующие фигуры.
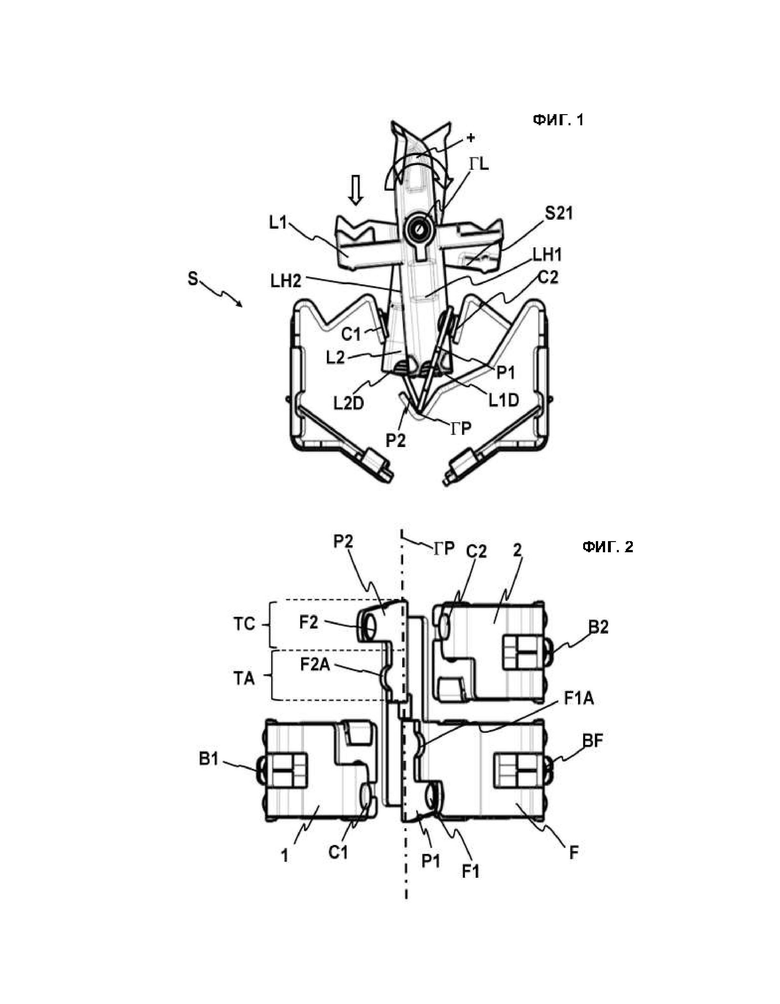
На фиг. 1 и 2 представлен механизм согласно предпочтительному варианту осуществления настоящего изобретения.
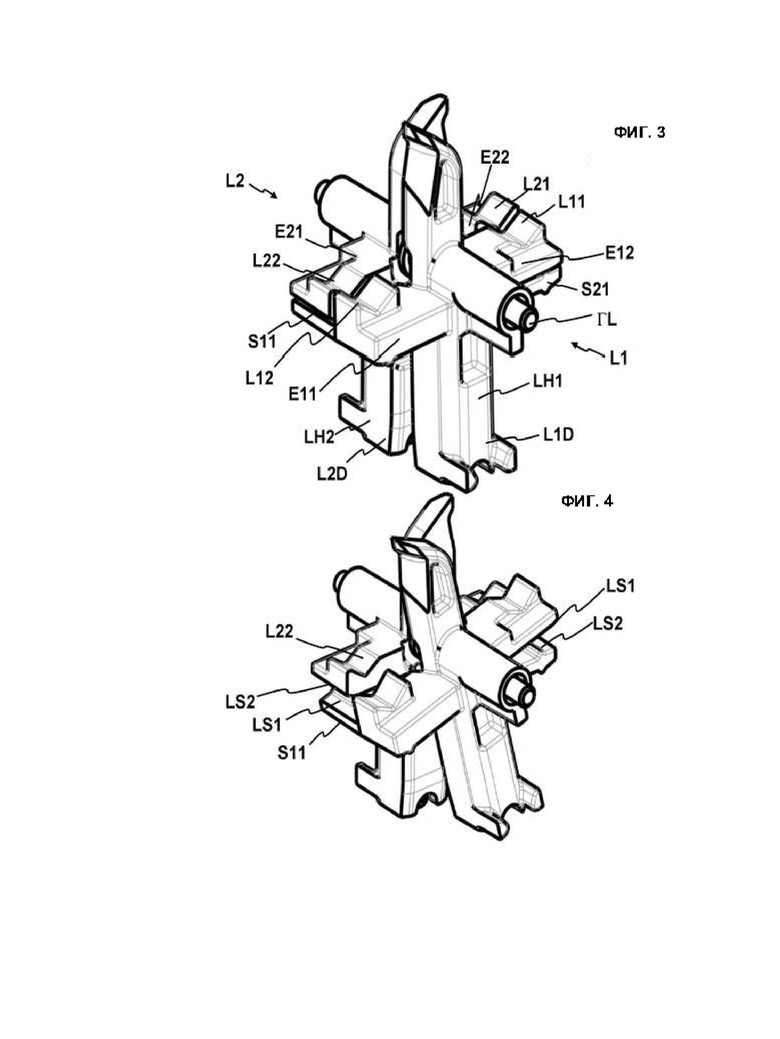
На фиг. 3 и 4 представлены две конфигурации относительного положения приводных рычагов.
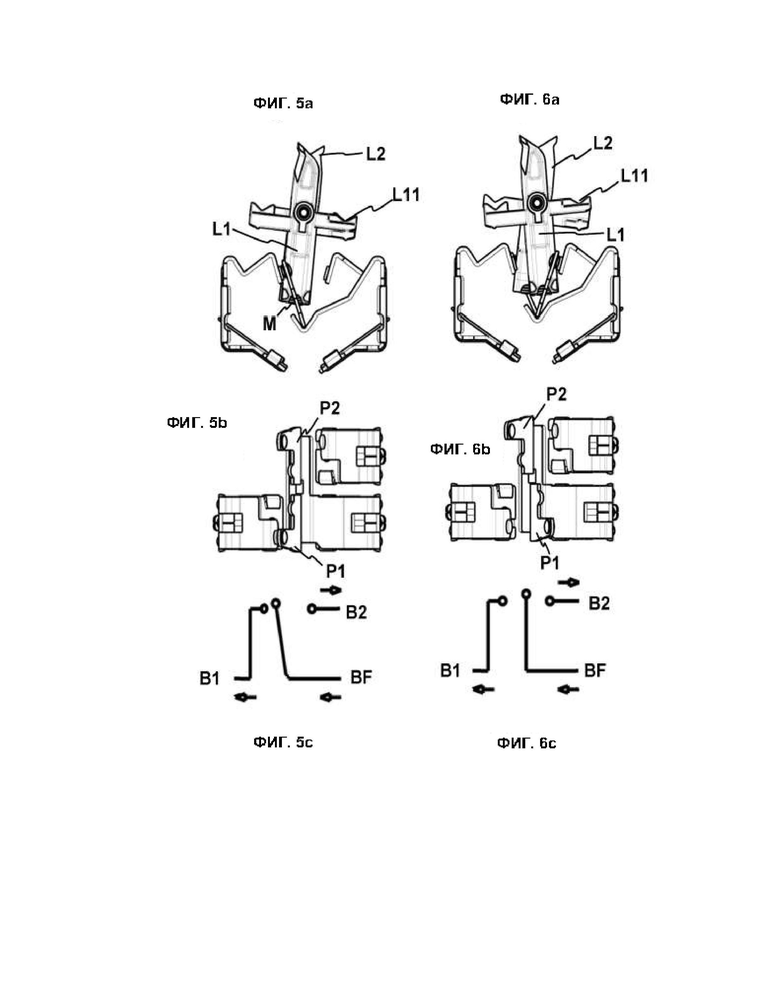
На фиг. 5а представлено изображение спереди механизма в конфигурации, в которой подвижные контакты наклонены влево, и, таким образом, установлено соединение между выводами В1 и BF. Рычаги находятся в соответствующем положении.
На фиг. 5b представлено изображение сверху, соответствующее фиг. 5а, и при этом продемонстрировано, что вывод В2 является изолированным.
На фиг. 5с схематически представлено соединение, установленное в конфигурациях, проиллюстрированных на фиг. 5а.
На фиг. 6а, 6b и 6с представлены изображения, аналогичные изображениям на фиг. 5а, 5b и 5с, соответственно, но для конфигурации, в которой подвижные контакты расположены на удалении от первого вывода и второго вывода, и, таким образом, здесь отсутствует проводимость.
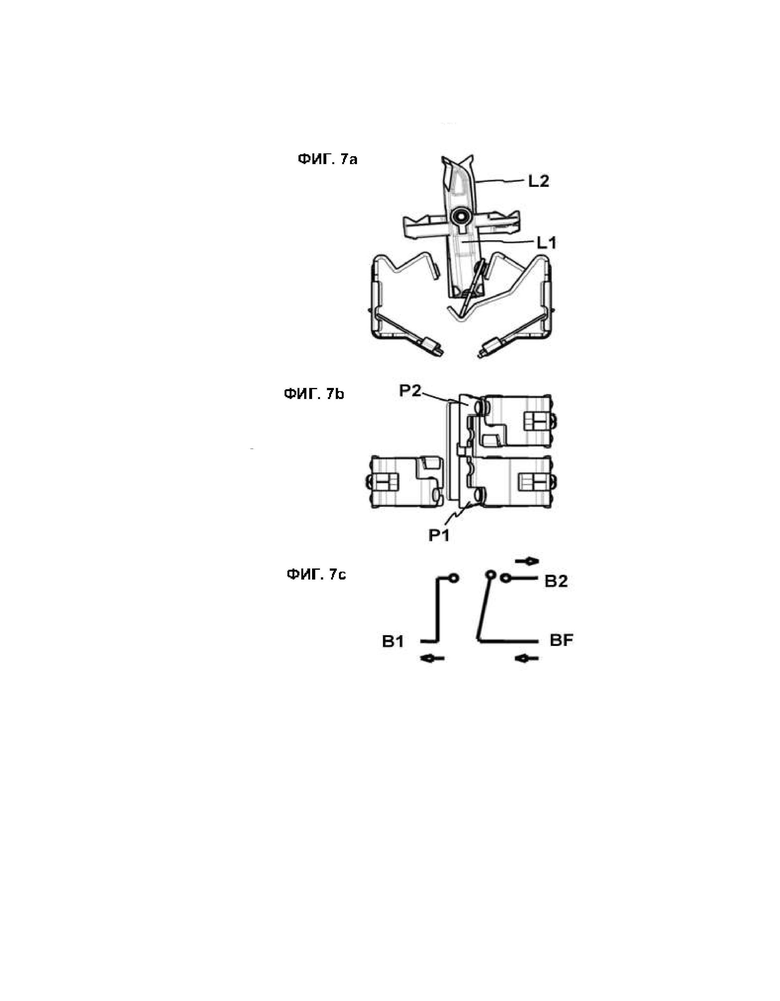
На фиг. 7а, 7b, и 7с представлены изображения, аналогичные изображениям на фиг. 5а, 5b и 5с, соответственно, но в третьей устойчивой конфигурации, в которой оба подвижных контакта наклонены вправо, и, таким образом, главный вывод и второй вывод находятся в электрическом соединении.
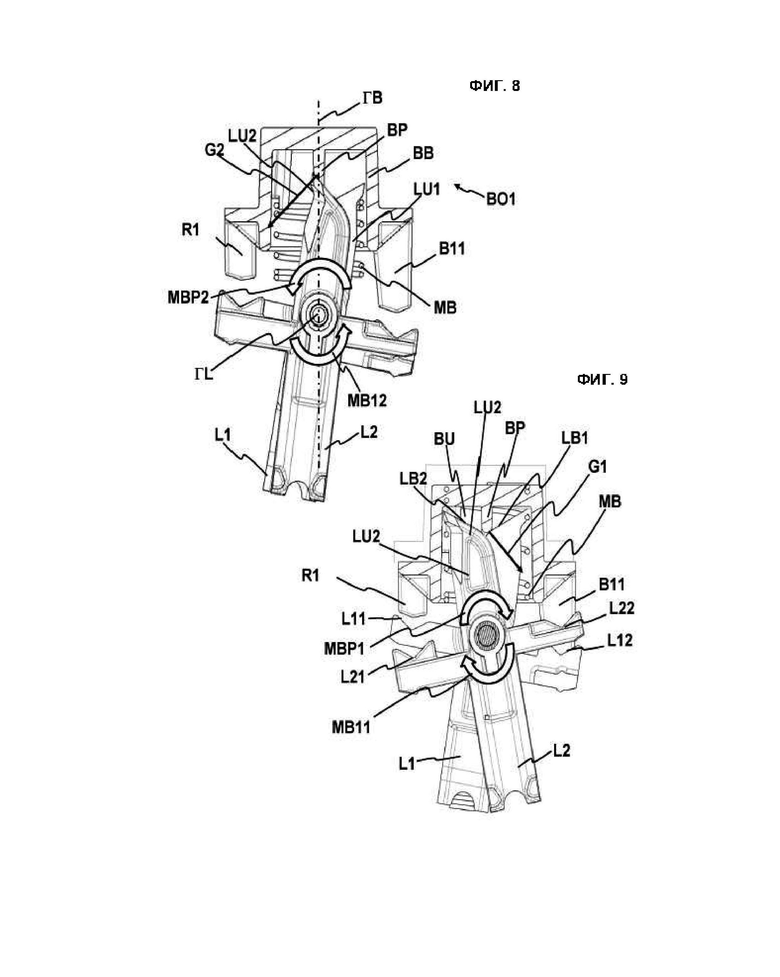
На фиг. 8 и 9 представлены два вертикальных разреза согласно варианту осуществления, в котором присутствует кнопка, предназначенная для приведения механизма в конфигурацию, проиллюстрированную на фиг. 6а-6с.
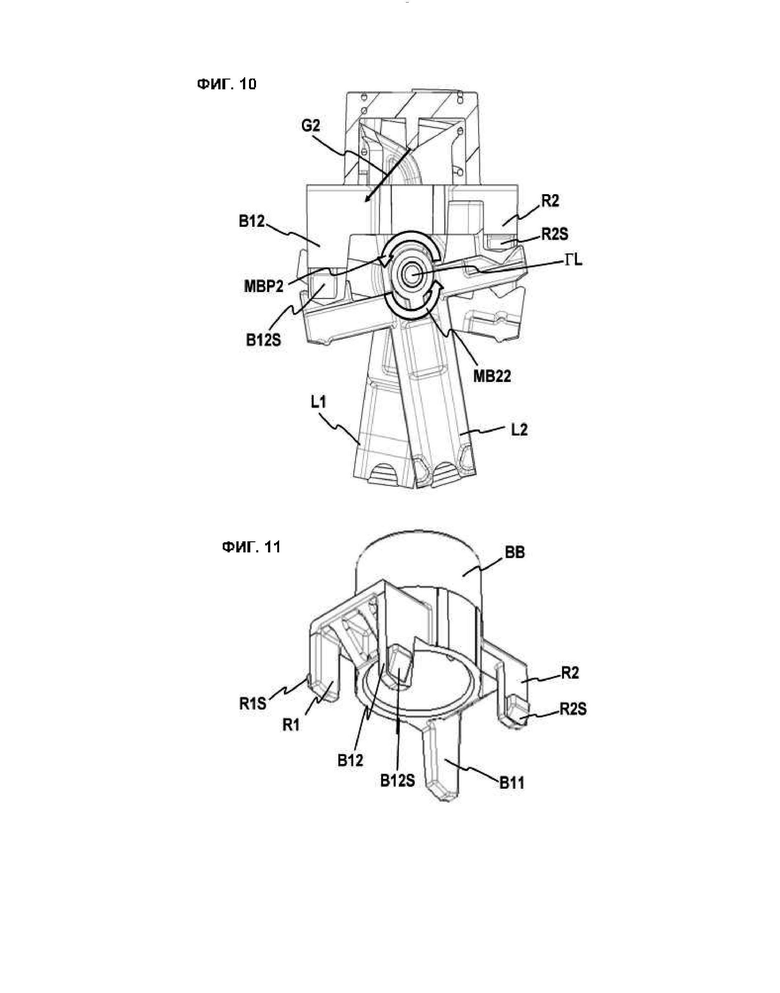
На фиг. 10 представлен вариант осуществления, проиллюстрированный на фиг. 8 и 9, но с расположением в перекрестной конфигурации, в разрезе, в который для упрощения рассмотрения добавлена деталь, содержащая удлинение и ножку на стороне второго рычага.
На фиг. 11 представлено перспективное изображение кнопки с относительным положением удлинений и ножек, которые совместно осуществляют функции направления и фиксации в нерабочей конфигурации.
Подробное раскрытие предпочтительных вариантов
осуществления настоящего изобретения
Как можно видеть на фиг. 1, настоящее изобретение относится к механизму для переключателей S, который содержит два качающихся подвижных контакта P1, Р2, причем каждый из них качается согласно оси вращения ГР, таким образом, что каждый из подвижных контактов P1, Р2 может качаться между двумя концевыми положениями.
Механизм содержит приводные рычаги L1, L2, представляющие собой первый приводной рычаг L1 и второй приводной рычаг L2, для каждого подвижного контакта P1, Р2, причем рычаги L1, L2 способны поворачиваться вокруг общего вала ГL.
Каждый рычаг L1, L2, также называемый термином «качающийся рычаг», имеет приводной конец L1D, L2D, предназначенный для непосредственного и/или косвенного толкания подвижных контактов L1, L2 в толчковой области Р11, Р12 для толкания подвижных контактов P1, Р2.
Непосредственное толкание оказывается возможным, потому что указанный конец может непосредственно толкать подвижные контакты. Однако, как правило, это толкание будет происходить в результате толкания посредством пружины М, вставленной в полость рычага, у соответствующего приводного конца L1D, L2D.
Кроме того, могут быть определены положительное и отрицательное направления поворота рычагов L1, L2.
Согласно настоящему изобретению, как можно видеть на фиг. 3 и 4, первый рычаг L1 содержит опорную поверхность LS1, и второй рычаг L2 содержит опорную поверхность LS2, предназначенную для опоры на опорную поверхность LS1 первого рычага L1. Указанные поверхности LS1, LS2 имеют такую ориентацию, в которой их взаимная опора может производить момент, действующий на рычаги L1, L2 по отношению к общему валу ГL, и, таким образом, что:
- первый рычаг L1 вызывает поворот второго рычага L2 при повороте согласно положительному направлению вращения (+), когда опорные поверхности LS1, LS2 вступают в контакт друг с другом; и
- первый рычаг L1 представляет собой ограничитель для остановки поворота второго рычага L2, когда второй рычаг L2 поворачивается согласно отрицательному направлению вращения.
Другими словами, в интервале эксплуатации рычагов, который обозначен контактами, которые ограничивают угловой рабочий интервал подвижных контактов, рычаг L1 может толкать рычаг L2 согласно одному из направлений, и рычаг L2 может толкать рычаг L1 согласно противоположному направлению. Однако рычаг L1 не может «тянуть» рычаг в противоположном направлении. Другими словами, рычаг L1 представляет собой ограничитель для рычага L2, и, с точки зрения конфигурации, существует запрещенная конфигурация, которая представляет собой конфигурацию, в которой рычаг L2 расположен справа, и рычаг 1 расположен слева (по отношению к детали, расположенной ниже вращающегося вала ГL рычагов, при рассмотрении рычагов на изображении спереди, на котором первый рычаг расположен перед вторым рычагом).
Каждый рычаг L1, L2 изготовлен из стержня LH1, LH2, соединяющего приводной конец L1D, L2D с общим валом ГL, и содержит два противоположных удлинения E11, Е12, Е21, Е22 по отношению к общему валу ГL, которые являются перпендикулярными по отношению к стержню LH1, LH2, причем указанные удлинения E11, Е12, Е21, Е22 содержат концы, находящиеся на верхней стороне с создающими давление поверхностями L11, L12, L21, L22, которые предназначены для приведения в действие рычагов L1, L2.
Взаимное толкание осуществляется посредством двух опорных поверхностей LS1, LS2 в каждом рычаге L1, L2. Указанные две поверхности LS1, LS2 каждого из рычагов L1, L2 расположены напротив друг друга по отношению к общему валу П.
Одно из удлинений E11, Е22 каждого рычага L1, L2 содержит выступ S11, S21, проходящий согласно направлению общего вала ГL и к другому рычагу L1, L2, причем выступ S11, S21 содержит одну из опорных поверхностей LS1, LS2, и другое удлинение Е12, Е21 каждого рычага L1, L2 содержит опорную поверхность для соответствующего выступа S11, S21.
Создающие давление поверхности L11, L12, L21, L22 имеют клинообразное сечение, таким образом, что их составляют две наклонные плоскости, определяющие вогнутость. Вогнутости, которые образованы в результате указанных клинообразных сечений, предназначены для восприятия толкания необозначенных кнопок, которые могут быть непосредственно приведены в действие пользователем и расположены выше проиллюстрированного механизма.
Согласно предпочтительному варианту осуществления приводной конец L1D, L2D каждого рычага L1, L2 составляют U-образные пазы, в которые плотно входят толчковые области P11, Р12 для толкания подвижных контактов P1, Р2.
Согласно предпочтительному варианту осуществления приводные концы L1D, L2D рычагов L1, L2 присоединены к толчковой области или приводному сегменту ТА для толкания или приведения в действие подвижного контакта Р1, Р2 с размещением промежуточной стабилизирующей пружины М.
Стабилизирующие пружины М для стабилизации сборок рычагов и подвижных контактов L1/P11l, L2P2 расположены в полости внутри стержней LH1, LH2, которые являются полыми по меньшей мере у соответствующего приводного конца L1D, L2D.
Кроме того, является предпочтительным вариант осуществления, согласно которому подвижные контакты PI, Р2 имеют общую ось вращения ГР. Также является предпочтительным вариант осуществления, согласно которому подвижные контакты PI, Р2 состоят из двух сегментов ТА, ТС. Первый приводной сегмент ТА представляет собой толчковую область, которую приводит в действие или толкает соответствующий рычаг L1, L2, и которая содержит выступ F1A, F2A для совмещения с концом пружины М, расположенной в рычаге L1, L2, и второй контактный сегмент ТС содержит язычок, который содержит на своем конце контактную точку F1, F2.
Таким образом, подвижные контакты P1, Р2 расположены по отношению друг к другу так, что их приводные сегменты ТА находятся рядом, и, следовательно, их контактные сегменты ТС находятся в большей степени снаружи.
Помимо подвижного механизма переключателя, согласно настоящему изобретению присутствуют главный вывод F, первый вывод 1, и второй вывод 2, которые представляют собой плату, расположенную на одном конце с соединительным штырем BF, B1, В2, при этом на конце, противоположном по отношению к соединительному штырю BF, главный вывод F содержит полоску, у которой вершину клинообразного сечения составляет общая ось вращения ГР подвижных контактов P1, Р2, таким образом, что в полоске определены опорный сегмент для первого подвижного контакта Р1 и опорный сегмент для второго подвижного контакта Р2.
Как представлено на фиг. 5а-7с, первый вывод 1 расположен напротив главного вывода F по отношению к общей оси вращения ГР подвижных контактов P1, Р2, причем второй вывод 2 расположен напротив опорного сегмента для второго подвижного контакта Р2 и рядом с главным выводом F, первый вывод 1 содержит контактную точку С1, второй вывод 2 содержит контактную точку С2, таким образом, что в результате опорных поверхностей LS1, LS2 оказываются допустимыми только следующие конфигурации:
- первая конфигурация, представленная на фиг. 6а-6с, в которой первый подвижный контакт Р1 не находится в соединении с контактной точкой С1 первого вывода 1, и при этом второй подвижный контакт Р2 не находится в соединении с контактной точкой С2 второго вывода 2, таким образом, что соединительный штырь BF главного вывода F является электрически изолированным от соединительных выводов B1, В2 первого вывода 1 и второй вывод 2.
- вторая конфигурация, представленная на фиг. 5а-5с, в которой первый подвижный контакт Р1 находится в соединении с контактной точкой С1 первого вывода 1, и при этом второй подвижный контакт Р2 не находится в соединении с контактной точкой С2 второго вывода 2, таким образом, что соединительный штырь BF главного вывода F находится в электрическом контакте с соединительным штырем В1 первого вывода 1; и
- третья конфигурация, представленная на фиг. 7а-7с, в которой первый подвижный контакт Р1 не находится в соединении с контактной точкой С1 первого вывода 1, и при этом второй подвижный контакт Р2 находится в соединении с контактной точкой С2 второго вывода 2, таким образом, что соединительный штырь BF главного вывода F находится в электрическом контакте с соединительным штырем В2 второго вывода 2;
причем оказывается невозможной конфигурация, в которой первый подвижный контакт Р1 находится в соединении с контактной точкой С1 первого вывода 1, и при этом второй подвижный контакт Р2 находится в соединении с контактной точкой С2 второго вывода 2.
Описанный механизм предназначен для эксплуатации с применением следующих трех кнопок или нажимных кнопок:
- первая кнопка, которая содержит создающий давление конец для приложения давления к создающей давление поверхности L11 первого рычага L1, что приводит ко второй конфигурации;
- вторая кнопка, которая содержит создающий давление конец для приложения давления к создающей давление поверхности L22 второго рычага L2, что приводит к третьей конфигурации; и
- третья кнопка, которая содержит два создающих давление конца для одновременного приложения давления к создающим давление поверхностям первого рычага L1 и второго рычага L2, что приводит к первой конфигурации.
Таким образом, настоящее изобретение находит преимущественное применение в системе для приведения в действие штор, содержащей реверсивный двигатель, содержащий три штыря и механизм для переключателей согласно настоящему изобретению, таким образом, что двигатель может находиться только в следующих режимах:
режим эксплуатации сдвижением вперед;
режим эксплуатации сдвижением назад; и
режим без снабжения энергией,
при этом предотвращается короткое замыкание.
Выше была подробно описана часть рычагов вплоть до уровня оси. Однако также предусмотрено, что механизм содержит, как представлено на фиг. 8 и 9, кнопку BO1, содержащую корпус ВВ и имеющую ось движения ГВ, перпендикулярную по отношению к общему валу ГL рычагов L1, L2.
Как представлено на фиг. 8-11, эта кнопка BO1 содержит корпус ВВ и имеет ось движения ГВ, перпендикулярную по отношению к общему валу ГL.
Эта кнопка В01 содержит на одой стороне первую ножку В11, проходящую в направлении оси движения ГВ, и предназначена для прижатия на первой создающей давление поверхности L12 первого качающегося рычага L1.
В свою очередь, первый качающийся рычаг L1 содержит верхнее удлинение LU1, противоположное соответствующему стержню LH1 по отношению к общему валу ГL. Это верхнее удлинение LU1 содержит, весьма преимущественным образом, наклонную поверхность LB1 по отношению к стержню LH1.
Кроме того, корпус ВВ содержит выпуклость BP, ориентированную в направлении наклонной поверхности LB1 и предпочтительно центрированную по оси движения ГВ. Эта поверхность LB1 ориентирована таким образом, что сила G1, которую производит выпуклость BP, представленная на фиг. 9, на наклонную поверхность LB1 создает момент МВР1 на рычаг L1 по отношению к общему валу ГL, имеющий такое же направление, как момент МВ11, который производит первая ножка В11 на создающую давление поверхность L12.
Таким образом, когда кнопка прижата на одном из ее концов, что вызывает ее поворот, и, таким образом, недостаточное движение конца, расположенного на мгновенной оси вращения кнопки, центр кнопки действительно движется наиболее определенным образом, и вышеупомянутое движение используется посредством выпуклости BP, чтобы производить момент, действующий на рычаг.
На фиг. 8-10 представлен первый рычаг L1 во второй плоскости (в отличие от фиг. 1-7с), в то время как второй рычаг L2 находится в первой плоскости. Таким образом, на фиг. 8 и 9 можно видеть часть кнопки, которая расположена существенно выше первого рычага L1. Однако на фиг. 10 также представлена часть кнопки, которая расположена спереди секущей плоскости разреза, т.е. часть кнопки, которая расположена на втором рычаге L2.
Кнопка содержит вторую ножку В12, которая выступает из корпуса кнопки в направлении оси движения ГВ и предназначена для нажатия на первую создающую давление поверхность L22 второго качающегося рычага L2, причем второй качающийся рычаг L2 содержит верхнее удлинение LU2, противоположное соответствующему стержню LH2 по отношению к общему валу ГL, верхнее удлинение LU2 содержащий наклонная поверхность LB2 по отношению к стержню LH2, при этом наклонная поверхность LB2 ориентирована таким образом, что сила G2 (представленная на фиг. 8), которую производит выпуклость BP на наклонную поверхность LB2, создает момент МВР2 на качающийся рычаг L2 по отношению к общему валу ГL, имеющий такое же направление, как момент МВ12, который производит вторая ножка В12 на создающую давление поверхность L21, таким образом, что когда кнопка В01 прижата, второй рычаг L2 поворачивается в направлении, противоположном по отношению к повороту первого качающегося рычага L1.
Аналогичным образом, предусмотрена кнопочная пружина MB, которая нажимает на нажимную кнопку В01, перемещая ее от общего вала ГL, причем кнопочная пружина MB опирается своим верхним концом на внутреннюю поверхность кнопки В01 и своим нижним концом на опору SB, неподвижную по отношению к корпусу переключателя.
В качестве фиксирующего приспособления для кнопки, как представлено на фиг. 11, предусмотрено, что ножки В11 и В12 содержат фиксирующие выступы (из которых на фиг. 10 и 11 обозначен выступ B12S ножки В12), которые расположены на наружной стороне ножек В11 и В12, обращенной к стенке переключателя S, на которой расположена кнопка В01. Функция фиксирующих выступов B12S заключается в том, чтобы выступать в качестве приспособлений для ограничения движений кнопки В01 таким образом, чтобы стабилизировать ее, когда она прижата кнопочной пружиной MB к своему положению, удаленному по отношению к рычагам LI, L2. На стенке переключателя, содержащей кнопку, на поверхности, обращенной к удлинению, предусмотрено углубление (не представленное на фигурах), которое является комплементарным по отношению к фиксирующему выступу B12S и в результате этого выступает в качестве ограничителя. Таким образом, в нерабочем состоянии кнопка В01 находится в равновесии, в котором ее нижнюю часть толкает кнопочная пружина MB, и ее фиксируют в противоположном направлении фиксирующие выступы B12S, имеющие опору в углублениях стенок.
Как можно видеть, например, на фиг. 11, кнопка В01 содержит направляющее и фиксирующее удлинение RG1, расположенное по отношению к первой ножке В11 на другой стороне по отношению к плоскости, которую определяют общий вал ГL и ось движения ГВ, причем вышеупомянутое направляющее и фиксирующее удлинение выступает из корпуса кнопки в направлении оси движения ГВ и содержит фиксирующий выступ R1S.
Кроме того, также может быть предусмотрено второе направляющее и фиксирующее удлинение R2, расположенное по отношению ко второй ножке В12 на другой стороне по отношению к плоскости, которую определяют общий вал ГL и ось движения ГВ, причем вышеупомянутое второе направляющее и фиксирующее удлинение выступает из корпуса кнопки в направлении оси движения ГВ и содержит фиксирующий выступ R2S.
Кнопка BO1 сконструирована с полостью BU, ориентированную в направлении качающихся рычагов LI, L2, причем верхнее удлинение LU1, LU2 рычагов содержится в вышеупомянутой полости BU.
Термин «содержит» и его производные (такие как «содержат» и т.д.) в настоящем документе не следует понимать в исключительном смысле, т.е. указанные термины не следует истолковывать как исключающие возможность того, что описанные и определенные объекты могут содержать другие элементы.
Является очевидным, что настоящее изобретение не ограничивается конкретными вариантами осуществления, которые описаны в настоящем документе, но также охватывает любые видоизменения, которые могут рассматривать любые специалисты в данной области техники в пределах общего объема настоящего изобретения, которое определено в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический переключатель | 2017 |
|
RU2733209C2 |
| КАМЕРА И КОМПЛЕКТУЮЩАЯ К КАМЕРЕ | 2013 |
|
RU2602404C2 |
| КАМЕРА И КОМПЛЕКТУЮЩАЯ К КАМЕРЕ | 2013 |
|
RU2655042C1 |
| УЛУЧШЕННАЯ ПОДСВЕТКА ЧАШКОДЕРЖАТЕЛЯ | 2015 |
|
RU2678795C2 |
| Расходомерное устройство для измерения параметра потока, образованного из текучей среды | 2015 |
|
RU2610345C1 |
| Устройство для управления электрическим подъемником | 1931 |
|
SU50176A1 |
| КОНТАКТОР | 2019 |
|
RU2742946C1 |
| КАРТРИДЖ И ЭЛЕКТРОФОТОГРАФИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2021 |
|
RU2758980C1 |
| СИСТЕМА ПОДВОДА МАТЕРИАЛА ДЛЯ ЗАПИСИ, ПЕЧАТНАЯ ПЛАТА, СТРУКТУРА И ЧЕРНИЛЬНЫЙ КАРТРИДЖ ДЛЯ УСТРОЙСТВА ПОТРЕБЛЕНИЯ МАТЕРИАЛА ДЛЯ ЗАПИСИ | 2010 |
|
RU2535284C2 |
| КАРТРИДЖ И БАРАБАННЫЙ УЗЕЛ ДЛЯ ЭЛЕКТРОФОТОГРАФИЧЕСКОГО УСТРОЙСТВА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2019 |
|
RU2712933C1 |
Изобретение относится к области механизмов для переключателей, в частности переключателей, предназначенных для реализации нескольких положений, а именно к переключателям, используемым в области реверсивных приводных двигателей для штор. Техническим результатом является обеспечение предотвращения нежелательных конфигураций контактов, которые могут приводить к коротким замыканиям, за счет непосредственного соединения рычагов друг с другом. Для этого механизм для переключателя (S) содержит два качающихся подвижных контакта (P1, Р2), каждый из которых качается согласно оси вращения (ГР) между двумя концевыми положениями, а для каждого подвижного контакта (P1, Р2) присутствуют приводные рычаги (L1, L2), которые могут поворачиваться вокруг оси (ГР), содержащей соответствующие приводные концы (L1D, L2D) для толкания подвижных контактов (L1, L2). При этом рычаги (L1) содержат соответствующие взаимодействующие опорные поверхности (LS1, LS2), причем поверхности (LS1, LS2) имеют такую ориентацию, в которой их взаимная опора означает, что первый рычаг (L1) вызывает поворот второго рычага (L2), когда он поворачивается согласно положительному направлению вращения (+), и когда опорные поверхности (LS1, LS2) вступают в контакт друг с другом; и первый рычаг (L1) представляет собой ограничитель для остановки поворота второго рычага (L2), когда второй рычаг (L2) поворачивается согласно отрицательному направлению вращения (-), таким образом, что предотвращается нежелательная конфигурация качающихся подвижных контактов (P1, Р2). 2 н. и 12 з.п. ф-лы, 17 ил.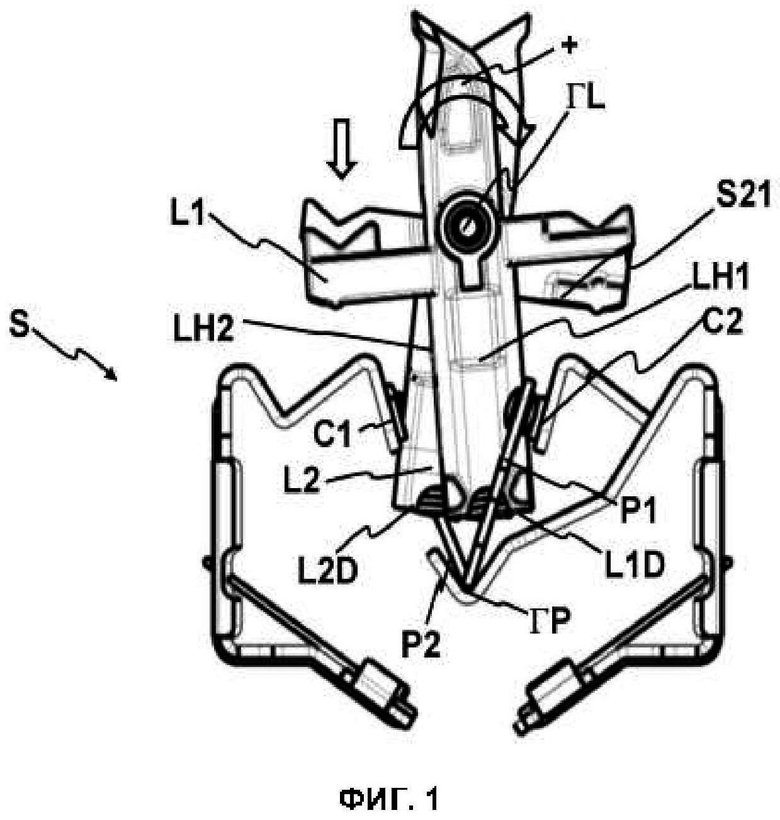
1. Механизм для переключателя (S), который содержит два качающихся подвижных контакта (P1, Р2), причем каждый из них качается согласно оси вращения (ГР) таким образом, что каждый из подвижных контактов (P1, Р2) может качаться между двумя концевыми положениями и содержит приводные рычаги (L1, L2), т.е. первый приводной рычаг (L1) и второй приводной рычаг (L2), по одному рычагу для каждого подвижного контакта (P1, Р2), при этом рычаги (L1, L2) способны поворачиваться вокруг общего вала (ГL) и в каждом рычаге (L1, L2) определен приводной конец (L1D, L2D), причем приводной конец (L1D, L2D), предназначенный для непосредственного и/или косвенного толкания подвижных контактов (P1, Р2) в толчковой области (P11, Р12) для толкания подвижных контактов (P1, Р2), таким образом, что определяются положительное и отрицательное направления поворота рычагов (L1, L2), причем механизм отличается тем, что первый рычаг (L1) содержит опорную поверхность (LS1), и второй рычаг (L2) содержит опорную поверхность (LS2), предназначенную для опоры на опорную поверхность (LS1) первого рычага (L1), причем поверхности (LS1, LS2) ориентированы таким образом, что их взаимная опора может производить момент, действующий на рычаги (L1, L2) по отношению к общему валу (ГL), и таким образом, что
первый рычаг (L1) вызывает поворот второго рычага (L2) при повороте согласно положительному направлению вращения (+), и когда опорные поверхности (LS1, LS2) вступают в контакт друг с другом; и
первый рычаг (L1) представляет собой ограничитель для остановки поворота второго рычага (L2), когда второй рычаг (L2) поворачивается согласно отрицательному направлению вращения (-).
2. Механизм для переключателя по п. 1, в котором каждый рычаг (L1, L2) изготовлен из стержня (LH1, LH2), соединяющего приводной конец (L1D, L2D) с общим валом (ГL).
3. Механизм для переключателя по п. 2, в котором каждый рычаг (L1, L2) содержит два противоположных удлинения (E11, Е12, Е21, Е22) по отношению к общему валу (ГL), которые являются перпендикулярными по отношению к стержню (LH1, LH2), причем указанные удлинения (E11, Е12, Е21, Е22) содержат концы, находящиеся на верхней стороне с создающими давление поверхностями (L11, L12, L21, L22), которые предназначены для приведения в действие рычагов (L1, L2).
4. Механизм для переключателя по любому из предшествующих пунктов, в котором каждый рычаг (L1, L2) содержит две опорные поверхности (LS1, LS2), предназначенные для опоры на опорную поверхность другого рычага (L1, L2), причем две поверхности (LS1, LS2) каждого из рычагов (L1, L2) расположены напротив друг друга по отношению к общему валу (ГL).
5. Механизм для переключателя по п. 4, в котором одно из удлинений (E11, Е21) каждого рычага (L1, L2) содержит выступ (S11, S21), проходящий согласно направлению общего вала (ГL) и к другому рычагу (L1, L2), причем выступ (S11, S21) содержит одну из опорных поверхностей (LS1, LS2), и другое удлинение (Е12, Е22) каждого рычага (L1, L2) содержит опорную поверхность для соответствующего выступа (S11, S21).
6. Механизм для переключателя по любому из предшествующих пунктов, в котором создающие давление поверхности (L11, L12, L21, L22) имеют клинообразное сечение таким образом, что их составляют две наклонные плоскости, определяющие вогнутость.
7. Механизм для переключателя по п. 2 или любому зависимому от него пункту, содержащий стабилизирующие пружины (М) для стабилизации сборок рычагов и подвижных контактов (L1/P1, L2P2), причем приводные концы LD1, LD2 стержней (LH1, LH2) являются полыми и содержат пружины (М).
8. Механизм для переключателя по любому из предшествующих пунктов, в котором подвижные контакты (P1, Р2) имеют общую ось вращения (ГР).
9. Механизм для переключателя по п. 8, в котором подвижные контакты (P1, Р2) состоят из двух сегментов (ТА, ТС), причем первый приводной сегмент (ТА) приводится в действие соответствующим рычагом (L1, L2) и содержит выступ (F1A, F2A) для совмещения с концом пружины (М), расположенной в рычаге (L1, L2), и второй контактный сегмент (ТС) содержит язычок, который содержит на своем конце контактную точку (F1, F2).
10. Механизм для переключателя по п. 9, в котором подвижные контакты (P1, Р2) расположены по отношению друг к другу таким образом, что их приводные сегменты (ТА) находятся рядом, и, следовательно, их контактные сегменты (ТС) находятся в большей степени снаружи.
11. Механизм для переключателя по любому из пп. 8-10, содержащий главный вывод (F), первый вывод (1) и второй вывод (2), которые представляют собой плату, расположенную на одном конце с соединительным штырем (BF, B1, В2), причем главный вывод (F) содержит на конце, противоположном по отношению к соединительному штырю (BF), полоску, у которой вершину клинообразного сечения составляет общая ось вращения (ГР) подвижных контактов (P1, Р2), таким образом, что в полоске определены опорный сегмент для первого подвижного контакта (Р1) и опорный сегмент для второго подвижного контакта (Р2).
12. Механизм для переключателя по п. 11, в котором первый вывод (1) расположен напротив главного вывода (F) по отношению к общей оси вращения (ГР) подвижных контактов (P1, Р2), второй вывод (2) расположен напротив опорного сегмента для второго подвижного контакта (Р2) и рядом с главным выводом (F), при этом первый вывод (1) содержит контактную точку (С1), и второй вывод (2) содержит контактную точку (С2), таким образом, что в результате для опорных поверхностей (LS1, LS2) оказываются допустимыми только следующие конфигурации:
первая конфигурация, в которой первый подвижный контакт (Р1) не находится в соединении с контактной точкой (С1) первого вывода (1) и при этом второй подвижный контакт (Р2) не находится в соединении с контактной точкой (С2) второго вывода (2), таким образом, что соединительный штырь (BF) главного вывода (F) является электрически изолированным от соединительных выводов (B1, В2) первого вывода (1) и второго вывода (2);
вторая конфигурация, в которой первый подвижный контакт (Р1) находится в соединении с контактной точкой (С1) первого вывода (1) и при этом второй подвижный контакт (Р2) не находится в соединении с контактной точкой (С2) второго вывода (2), таким образом, что соединительный штырь (BF) главного вывода (F) находится в электрическом контакте с соединительным штырем (В1) первого вывода (1); и
третья конфигурация, в которой первый подвижный контакт (Р1) не находится в соединении с контактной точкой (С1) первого вывода (1), и при этом второй подвижный контакт (Р2) находится в соединении с контактной точкой (С2) второго вывода (2), таким образом, что соединительный штырь (BF) главного вывода (F) находится в электрическом контакте с соединительным штырем (В2) второго вывода (2);
причем оказывается невозможной конфигурация, в которой первый подвижный контакт (Р1) находится в соединении с контактной точкой (С1) первого вывода (1) и при этом второй подвижный контакт (Р2) находится в соединении с контактной точкой (С2) второго вывода (2).
13. Механизм для переключателя по п. 12, содержащий:
первую кнопку, которая содержит создающий давление конец для приложения давления к создающей давление поверхности (L11) первого рычага (L1), что приводит ко второй конфигурации;
вторую кнопку, которая содержит создающий давление конец для приложения давления к создающей давление поверхности (L22) второго рычага (L2), что приводит к третьей конфигурации; и
третью кнопку, которая содержит два создающих давление конца для одновременного приложения давления к создающим давление поверхностям первого рычага (L1) и второго рычага (L2), что приводит к первой конфигурации.
14. Система для приведения в действие штор, содержащая реверсивный двигатель, содержащий три штыря, и переключатель по п. 12 или 13, таким образом, что двигатель может находиться только в следующих режимах:
режим эксплуатации с движением вперед;
режим эксплуатации с движением назад; и
режим без снабжения энергией,
при этом предотвращается короткое замыкание.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2556085C2 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| ДОННОЕ ВЫПУСКНОЕ ЗАТВОРНОЕ УСТРОЙСТВО ДЛЯ ЦИСТЕРНЫ (ВАРИАНТЫ) | 1999 |
|
RU2161573C2 |
| СПОСОБ ПОЛУЧЕНИЯ ЖЕЛЕЙНОГО МАРМЕЛАДА | 2003 |
|
RU2273203C2 |

