Изобретение относится к средствам обучения, а именно к морским навигационным тренажерам, и может быть использовано для приобретения навыков, тренировки и повышения профессиональной квалификации судоводителей, в том числе морских автономных и дистанционно управляемых надводных судов (МАНС), а также операторов системы управления движением судов (СУДС) и центров дистанционного управления (ЦДУ) движением МАНС в условиях реализации а-Навигации и е-Навигации.
Внедрение технологий а-Навигации и е-Навигации в судоходстве обеспечивает значительный эффект в ключевых аспектах, таких как повышение уровня безопасности судовождения, снижение затрат на эксплуатацию судов, уменьшение экологических рисков. Поэтому требуется подготовка широкого круга специалистов для морского и речного флота, таких как судоводители конвенционных судов и основных категорий МАНС, операторы ЦДУ и СУДС в районах функционирования МАНС.
Для решения указанной задачи предлагается использовать технологии виртуальной и дополненной реальности (VR/AR), которые являются ключом к принципиально новому уровню взаимодействия человека с цифровым миром. Широкое внедрение продуктов на основе VR/AR-технологий в сфере образования способствует формированию новых подходов к процессу обучения и повышению уровня образования, в том числе в морской отрасли.
Из уровня техники известен морской интеллектуальный тренажер по патенту RU 2251157 (МПК G09B 9/06, опубл. 27.04.2005), который содержит рабочие места обучаемых (РМО), блок моделирования, блок руководителя обучения, блок оценки действий обучаемого, блок программного управления, блоки характеристик судна и внешней среды, средства виртуальной реальности, блок документирования результатов обучения, блок модели обучаемого, средства адаптации обучающей программы под конкретного пользователя и интеллектуальный интерфейс.
Известен автоматизированный тренажерный комплекс транспортного средства по патенту на изобретение RU №2398285 (МПК G09B9/02, опубл. 27.08.2010), содержащий комплект бортового оборудования, конфигуратор тренажера и взаимосвязанные через маршрутизатор блок инструктора, блок баз данных, блок моделирования систем транспортного средства, блок моделирования поведения транспортного средства, диспетчер тренажерных задач, блок ручного управления, блок динамического моделирования окружающей среды, блок моделирования тактической обстановки, средства визуализации и модуль настройки визуальных моделей.
Из патента на изобретение RU 2632675 (МПК G09B 9/00, опубл. 09.10.2017) известен тренажерный центр для экипажей судов, который содержит автоматизированные рабочие места (АРМ) обучаемых, при этом каждое АРМ выполнено на базе персонального компьютера (ПК) в виде виртуального имитатора навигационной обстановки, параметров функционирования судовых систем и пульта управления судна, программируемый блок моделирования в составе формирователя параметров динамики судна, формирователя модели датчиков внешних воздействий, формирователя ситуационной модели навигационной обстановки и блока формирователей моделей объектов управления, включающего формирователь навигационных параметров судна, формирователь модели судовой энергетической установки, формирователь модели судовых систем и формирователь систем электропитания, модуль экспертной системы оценки результатов тренинга, который включает блок тестовой оценки обучаемых, блок оценки результатов тренинга в зависимости от категории сложности, формирователь контрольных критериев оценки результатов тренинга и блок вынесения решения по результатам тренинга, модуль селекции режимов и типа тренинга, содержащий блок коммутации режимов тренинга и блок коммутации типов тренинга, и АРМ руководителя обучения, содержащего ПК, блок визуализации и блок документирования.
Известен тренажерный комплекс для подготовки судоводителей по патенту RU 2657708 (МПК G09B 9/00, опубл. 14.06.2018), содержащий пульт управления инструктора и пульты управления обучаемых, выполненные в виде стандартных индивидуальных ПК и объединенные в локальную компьютерную сеть, причем на каждый ПК рабочего места обучаемого установлено необходимое программное обеспечение с конкретной задачей обучения и осуществления контроля знаний в установленных компетенциях, а индивидуальные персональные компьютеры в объединенной локальной компьютерной сети имеют через пульт управления инструктора связь между собой в пределах назначенной инструктором группы для выполнения совместной задачи расхождения, каждый пульт управления обучаемого содержит блок, имитирующий радиолокационную станцию (РЛС), и блок, имитирующий авторулевое устройство и машинный телеграф управления двигателем.
Из патента на полезную модель RU 128377 (МПК G09B 9/06, опубл. 20.05.2013) известен тренажерный комплекс, который включает соединенные шиной данных навигационный модуль, модуль глобальной морской системы связи при бедствии (ГМССБ), промысловый модуль, модуль судовой энергоустановки (СЭУ), рабочее место руководителя обучения (РМРО), коллективное устройство отображения, блок баз данных, сервер данных, блок визуализации, блок видеоконтроля действий обучающегося, блок автоматизированной системы оценки обучающегося, информационно-справочный модуль ГМССБ и блок разработки рыбопромысловых районов и планшетов, при этом навигационный модуль содержит взаимосвязанные с шиной данных АРМ судоводителя, АРМ оператора электронно-картографической навигационной информационной системы (ЭКНИС), АРМ оператора РЛС, блок моделирования движения судна, блок моделирования ЭКНИС и блок моделирования РЛС, модуль ГМССБ содержит взаимосвязанные с шиной данных, по крайней мере, один АРМ оператора ГМССБ и блок моделирования ГМССБ, промысловый модуль содержит взаимосвязанные с шиной данных АРМ трал-мастера, АРМ оператора эхолота, АРМ оператора сонара и блок моделирования промысловых операций, модуль СЭУ содержит взаимосвязанные с шиной данных не менее одного АРМ оператора СЭУ и блок моделирования СЭУ, а РМРО содержит взаимосвязанные с шиной данных блок управления РМРО, конфигуратор тренажера, редактор сценариев, блок индикации и блок печати.
Техническое решение, известное из патента RU 128377, выбрано в качестве ближайшего аналога данного изобретения.
Приведенные аналоги отличаются друг от друга, в основном, структурой математического обеспечения и баз данных, обусловленными их применением для индивидуального либо коллективного обучения. В качестве недостатков ближайшего аналога, а также недостатков других приведенных аналогов можно отметить отсутствие возможностей обучения широкого круга специалистов по формированию навыков, необходимых в условиях реализации а-Навигации и е-Навигации, в том числе их совместных действий. Кроме того, в указанных аналогах не используются устройства виртуальной и дополненной реальности.
Сущность предлагаемого технического решения заключается в создании навигационного тренажера (далее - ВР-НТ) по а-Навигации и е-Навигации на основе технологий виртуальной реальности, обеспечивающего сопровождение обучения, подготовки и переподготовки специалистов для морского и речного флота, в том числе судоводителей конвенционных судов и основных категорий МАНС, операторов ЦДУ и СУДС в районах функционирования МАНС, путем устранения указанных недостатков.
Технический результат заключается в расширении функциональных возможностей тренажера, которые в совокупности позволяют реализовать индивидуальное и групповое обучение судоводителей конвенционных судов и МАНС, операторов ЦДУ и СУДС в районах функционирования МАНС, отработки совместных действий специалистов в едином информационном пространстве данных, а также повысить качества визуализации окружающей и навигационной обстановки, адекватной реальной и сформированной с учетом отрабатываемых задач в условиях реализации а-Навигации и е-Навигации.
Указанный технический результат достигается тем, что в ВР-НТ, содержащий объединенные локальной вычислительной сетью (ЛВС) не менее одного РМО ходового мостика, рабочее место инструктора (РМИ), включающего взаимосвязанные шиной данных блок управления, блок отображения, конфигуратор тренажера, редактор сценариев и блок печати, и сервер, включающий блок баз данных, дополнительно включено РМО системы управления движением судов и центра дистанционного управления (СУДС/ЦДУ), включающее имитатор РМО СУДС/ЦДУ и шлем виртуальной реальности РМО СУДС/ЦДУ, соединенные с ЛВС, РМО ходового мостика включает имитатор рабочего места судоводителя и шлем виртуальной реальности РМО ходового мостика, соединенные с ЛВС, а в сервер дополнительно включены блок моделирования движения судна, блок моделирования работы систем и устройств судна, блок моделирования работы систем и устройств СУДС/ЦДУ, не менее одного блока взаимодействия с РМО ходового мостика, блок взаимодействия с РМО СУДС/ЦДУ, блок моделирования навигационной обстановки и блок моделирования внешних возмущений, причем все блоки сервера объединены шиной данных.
Технический результат достигается также тем, что:
блок баз данных содержит совокупность следующих баз данных: база данных математических моделей судов, картографическая база данных районов моделирования, база данных стандартных географических моделей, база данных упражнений, база данных визуальных параметров объектов, база данных звуковых параметров объектов, база данных эксплуатационных параметров судов, база данных параметров метеообстановки, база данных навигационной обстановки, база данных отказов бортового оборудования, база данных моделей счисления координат, информационно-справочный модуль ГМССБ;
органы управления, входящие в состав имитатора РМО ходового мостика, размещены в штатном варианте, а приборное оборудование выполнено в виде имитаторов, отображаемых на экранах, или реальных приборов;
оборудование, входящие в состав имитатора РМО СУДС/ЦДУ, повторяет внешний вид и расположение элементов штатного оборудования и выполнено в виде имитаторов, отображаемых на экранах, или реального оборудования;
блок моделирования внешних возмущений выполнен с возможностью моделирования параметров ветра, волнения водной поверхности и течения, расположения светил, особенностей акваторий.
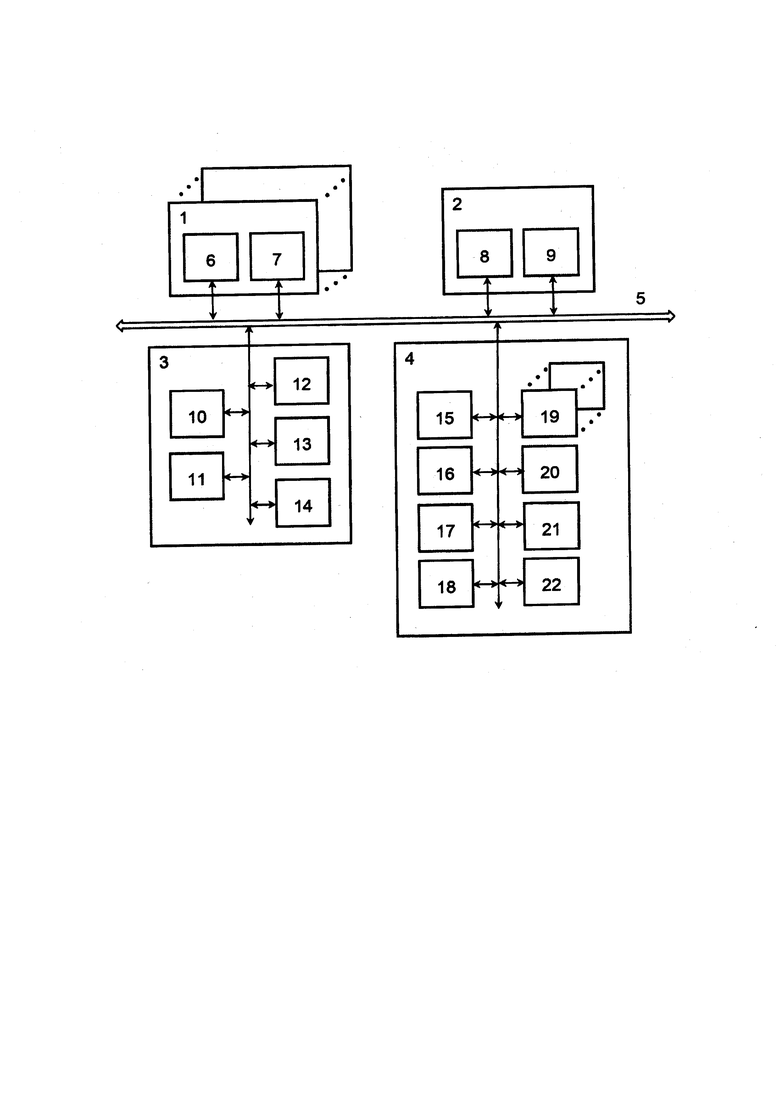
Структурная электрическая схема ВР-НТ приведена на чертеже, где:
1 - РМО ходового мостика;
2 - РМО СУДС/ЦДУ;
3 - РМИ;
4 - сервер;
5 - ЛВС;
6 - имитатор рабочего места судоводителя;
7 - шлем виртуальной реальности РМО ходового мостика;
8 - имитатор рабочего места оператора СУДС/ЦДУ;
9 - шлем виртуальной реальности РМО СУДС/ЦДУ;
10 - блок управления;
11 - блок отображения;
12 - конфигуратор тренажера;
13 - редактор сценариев;
14 - блок печати;
15 - блок баз данных;
16 - блок моделирования движения судна;
17 - блок моделирования работы систем и устройств судна;
18 - блок моделирования работы систем и устройств СУДС/ЦДУ;
19 - блок взаимодействия с РМО ходового мостика;
20 - блок взаимодействия с РМО СУДС/ЦДУ;
21 - блок моделирования навигационной обстановки;
22 - блок моделирования внешних возмущений.
ВР-НТ представляет собой программно-аппаратный комплекс, работающий в едином информационном пространстве данных, включающий не менее одного РМО 1 ходового мостика, РМО 2 СУДС/ЦДУ, РМИ 3 и сервер 4, объединенные ЛВС 5.
Рабочее место 1 обучаемого ходового мостика включает подключенные к ЛВС 5 имитатор 6 рабочего места судоводителя и шлем 7 виртуальной реальности РМО ходового мостика.
Имитатор 6 рабочего места судоводителя предназначен для управления математической моделью (ММ) имитируемого судна (далее - собственного судна), в том числе МАНС, и позволяет с помощью входящих в его состав блоков имитировать устройства и системы ходового мостика собственного судна:
- панели дистанционного управления пропульсивной установкой одновинтового и двухвинтового судна включая, как минимум, машинный телеграф, индикаторы оборотов двигателя и шага винта, панель аварийной сигнализации, органы управления и индикатора нагрузки подруливающего устройства;
- машинного телеграфа, как для одновинтового, так и для двухвинтового судна, пульта управления винтом рулевого шага (ВРШ);
- консоли управления рулевым устройством в автоматическом и ручном режиме, включая переключатель режимов работы, органы управления в ручном режиме, индикаторы заданного и истинного положения руля, индикатор угловой скорости поворота;
- панели управления судном или имитация панели управления на экране монитора;
- панели дистанционного управления якорным устройством, включая блок управления якорным устройством и индикацию параметров якорь-цепи;
- панели включения навигационных огней и палубного освещения;
- панели сигнальных фигур;
- панели управления автоматом звуковых сигналов с возможностью подачи звуковых сигналов в ручном режиме;
- устройства для подачи сигналов судовых тревог;
- указателей скорости хода относительно воды и грунта;
- указателя глубины под килем;
- репитера гирокомпаса;
- репитера магнитного компаса;
- индикатора судовой РЛС;
- судовой аппаратуры автоматической идентификационной системы (АИС);
- приемо-индикаторов глобальной навигационной спутниковой системы (ГНСС);
- спутниковых навигационных систем;
- ЭКНИС;
- УКВ радиоустановки;
- УКВ радиоустановки и/или комплекта радиооборудования ГМССБ, соответствующих требованиям Международной конвенции по охране человеческой жизни на море (СОЛАС) для судов, совершающих рейсы в морских районах А1 и А2;
- комплекта радиооборудования ГМССБ, соответствующего требованиям конвенции СОЛАС для морского района;
- средства двусторонней связи «РМО ходового мостика - РМИ», имитирующие средства внутрисудовой связи;
- кнопки активации сигнала и кнопки режима тестирования судовой системы охранного оповещения (ССОО);
- панели управления пеленгатором с возможностью изменения горизонтального и вертикального углов зрения, увеличения изображения и снятия визуального пеленга;
- морского пеленгатора с возможностью изменения горизонтального и вертикального углов зрения, использования дальномерной сетки;
- пульта управления прожектором;
- индикатора углов крена (кренометр);
- индикаторов для отображения судового времени;
- индикаторов для отображения направления и скорости ветра;
- системы контроля дееспособности вахтенного помощника (КДВП).
Имитатор 6 рабочего места судоводителя представляет собой аппаратно-программный комплекс, имитирующий расположение устройств и систем ходового мостика, максимально приближенное к их обычному расположению на ходовом мостике судна в соответствии с требованиями Правила 15 Главы V конвенции СОЛАС-74, а также их функционирование.
Шлем 7 виртуальной реальности РМО ходового мостика является аппаратным средством отображения и управления РМО 1 ходового мостика. В качестве шлема 7 можно использовать шлем смешанной реальности VARJO XR-3 с функцией отслеживания положения рук, благодаря чему не требуется комплект аппаратных манипуляторов для обеспечения взаимодействия с виртуальной и настоящей реальностью. Шлем смешанной реальности VARJO XR-3 предоставляет бесшовное смешение настоящей и виртуальной реальности без задержки. Бионические дисплеи с полем зрения 115 градусов и частотой обновления 90 Гц обеспечивают реализм изображения практически на уровне человеческого глаза, кроме того, шлем оснащен встроенным трекингом глаз до 200 Гц и отслеживанием рук на базе Ultraleap.Повышение точности отслеживания без необходимости установки базовых станций достигается технологией inside-out.
Отображение имитируемых устройств и систем ходового мостика в виртуальной реальности максимально приближены к их обычному расположению на ходовом мостике судна в соответствии с требованиями Правила 15 Главы V конвенции СОЛАС-74.
Рабочее место 2 обучаемого СУДС/ЦДУ включает подключенные к ЛВС 5 имитатор 8 рабочего места оператора СУДС/ЦДУ и шлем 9 виртуальной реальности РМО СУДС/ЦДУ.
Имитатор 8 рабочего места оператора СУДС/ЦДУ может работать в одном из двух режимов: «СУДС» или «ЦДУ движением МАНС».
Имитатор 8 рабочего места оператора СУДС/ЦДУ в режиме «СУДС» предназначен для имитации функций, устройств и систем СУДС и обеспечивает выполнение следующих функций:
- открытие и закрытие картографических окон;
- загрузка карт в картографические окна;
- нанесение вспомогательной информации;
- построение маршрутов;
- настройка отображения картографической информации;
- управление РЛС;
- управление радарным процессором;
- настройка отображения радиолокационной информации;
- управление средствами автоматической радиолокационной прокладки (САРП);
- управление телевизионной камерой;
- прогноз развития ситуации;
- оперативная работа с базами данных;
- управление системой регистрации;
- установка параметров предупредительной и тревожной сигнализации;
- настройка и ведение радиосвязи в диапазоне УКВ;
- использование резервного канала связи;
- обмен информацией через АИС;
- имитацию работы РЛС миллиметрового и сантиметрового диапазонов с учетом помех от дождя и волнения;
- имитацию введения зон бланкирования излучаемого сигнала береговой РЛС (2 зоны);
- имитацию радиолокационной информации, принимаемой от двух РЛС;
- формирование не менее 4-х зон радиолокационной тени береговой РЛС;
- имитацию асинхронных радиолокационных помех.
Имитатор 8 рабочего места оператора СУДС/ЦДУ в режиме «СУДС» обеспечивает имитацию устройств и систем СУДС:
- консоли оператора с двумя или более ситуационными дисплеями для отображения навигационной обстановки, информации по сопровождаемым целям;
- системы, обеспечивающей дистанционное видеонаблюдения за акваторией;
- пульта управления УКВ радиостанцией;
- базовой станции АИС;
- системы по работе с базами данных по судам.
Имитатор 8 рабочего места оператора СУДС/ЦДУ в режиме «ЦДУ движением МАНС» предназначен для управления ММ МАНС и имитации устройств и систем ЦДУ движением МАНС:
- консоли оператора с двумя или более ситуационными дисплеями для отображения навигационной обстановки, информации по сопровождаемым целям;
- системы, обеспечивающей дистанционное видеонаблюдения за акваторией;
- пульта управления УКВ радиостанцией;
- базовой станции АИС;
- системы по работе с базами данных по судам;
- системы отображения инфографики системы поддержки принятия решений (СППР);
- системы визуализации навигационной обстановки и звукового сопровождения выбранного судна;
- радара на борту выбранного судна;
- ЭКНИС с привязкой к текущему положению выбранного судна;
- конинг-панели, отображающая минимально необходимый набор основных навигационных приборов выбранного судна;
- панели судовой энергетической установки;
- универсального органа управления движением судов с различными энергетическими установками;
- системы управления осадкой, расчета и индикации посадки, остойчивости, прочности корпуса судна в зависимости от загрузки судна, погодных условий, открытой или закрытой акватории плавания;
- панели активных судовых сигнализаций.
Имитатор 8 рабочего места оператора СУДС/ЦДУ в режиме «ЦДУ движением МАНС» обеспечивает:
- выполнение функций, соответствующих требованиям Российского морского регистра судоходства (РМРС);
- панорамную визуализацию навигационной обстановки вокруг МАНС;
- звуковое сопровождение выполнения упражнения.
Имитатор 8 РМО СУДС/ЦДУ представляет собой аппаратно-программный комплекс, имитирующий внешний вид и расположение элементов штатного оборудования СУДС/ЦДУ, максимально приближенное к их обычному расположению, а также их функционирование.
Шлем 9 виртуальной реальности РМО СУДС/ЦДУ является аппаратным средством отображения и управления РМО 2 СУДС/ЦДУ- В качестве шлема 9 можно использовать шлем смешанной реальности VARJO XR-3. Отображение имитируемых устройств и систем СУДС/ЦДУ в виртуальной реальности максимально приближены к реальной аппаратуре.
Рабочее место 3 инструктора предназначено для управления и конфигурирования аппаратного обеспечения ВР-НТ, установки программного обеспечения, диагностики неисправностей, а также формирования сценариев упражнений, запуска упражнений, управления ходом выполнения упражнений, формирования отчетов и просмотра результатов выполнения упражнений.
Рабочее место 3 инструктора обеспечивает:
- видеонаблюдение за всеми РМО тренажера;
- включение, выключение, как тренажера в целом, так и его отдельных частей;
- формирование сценария упражнения с учетом выбранных района и модели собственного судна, имитируемого на РМО 1 ходового мостика, заданных крена и дифферента (для судна в аварийном состоянии), расстановки судов-целей, их траекторий и скоростей движения, данных АИС судов-целей, гидрометеорологических условий (ветер, течение, состояние видимости) и т.д.;
- генерацию и распечатку таблиц маневренных элементов для каждой модели собственного судна и лоцманской карточки;
- управление упражнениями в части их запуска, остановки (паузы), возобновления и изменения масштаба времени;
- управление ходом выполнения упражнения в части: изменения погодных условий (ветер, волнение, течение), траекторий и параметров движения судов-целей; включения-выключения звуковых сигналов судов целей; установки на собственных судах режимов работы навигационного оборудования, его ошибок и неисправностей оборудования (РЛС, ГНСС, лаг, гирокомпас, эхолот, АИС); ввода неисправностей/погрешностей в моделирование работы оборудования ходового мостика и машинного отделения собственного судна; задания помех и ложных целей; осуществления внутренней двусторонней связи (интерком) инструктор - РМО 1 ходового мостика; имитации радиосвязи с РМО 1 ходового мостика от имени береговых станций, служб и судов-целей; установки времени суток выполнения упражнения; изменения состояние видимости (дождь, снег, туман), параметров движения судов-целей; включения-выключения навигационных огней и освещения судов-целей; подъем на них сигнальных фигур и флагов; использования судами-целями парашютных ракет, фальшфейеров и плавучих дымовых сигналов; управления траекториями и параметрами движения специальных объектов-целей (спасательные шлюпка, плот и авиационные средства, человек (группа людей) за бортом); управления траекториями и параметрами движения буксиров-целей; мониторинга использования на собственных судах ССОО для проверки, работоспособности и передачи сигнала об угрозе безопасности судну; ввода необходимых АИС данных для судов-целей, вертолетов-целей; обмена сообщениями АИС (прием и отправка) с собственными судами от имени судна-цели; мониторинга обмена сообщениями АИС; воздействия на РЛС собственных судов эхо-сигналов, помех от других радаров, отказа приемопередатчика, повышенного шума приемника, отказа/восстановления работы РЛС; установки режима работы системы КДВП собственных судов;
- создание на РМО 1 ходового мостика собственного судна нештатной ситуации в навигационной обстановке (сбои в работе систем определения и отображения места судна, возникновение систематической погрешности датчиков навигационной информации);
- контроль выполнения, разбор и анализ упражнений в части: архивирования выполнения упражнения; проигрывания упражнения в режиме реального времени и ускоренного масштаба времени; распечатки картины взаимного расположения судов в любой момент выполнения упражнения; визуального и аудио контроля действий на РМО ВР-НТ; регистрации параметров движения собственных судов и судов-целей с целью сохранения для последующего анализа; вывода на экран консоли РМИ 3 выбранных характеристик и параметров движения собственных судов, судов-целей, специальных объектов-целей, характеристик неподвижных объектов, параметров РЛС собственных судов; индикации и регистрация фактов отсутствия подтверждения вахтенным помощником подачи на ходовом мостике звукового сигнала тревоги первого уровня системы КДВП; повторения выполненного упражнения с любого момента времени, включая синхронное воспроизведение траекторий движения судов на дисплеях РЛС/ЭКНИС на мостике/мостиках, а также синхронное воспроизведение радиопереговоров; вывода на экран консоли РМИ 3 экранов РЛС любого из собственных судов, по запросу, а также экранов консолей РМО 2 СУДС/ЦДУ; вывода на экран консоли РМИ 3 электронного судового журнала обучаемых для проверки правильности ведения записей; просмотра ручной электронной корректуры, выполненной обучаемыми, и проверки правильности ее выполнения; просмотра плана перехода судна, маршрута, выполненного обучаемым и проверки правильности его выполнения; распечатки результатов выполнения обучаемыми задания.
Рабочее место 3 инструктора содержит взаимосвязанные по средствам шины данных блок 10 управления, блок 11 отображения, конфигуратор 12 тренажера, редактор 13 сценариев и блок 14 печати и может представлять собой набор стандартных аппаратных средств в виде электронно-вычислительной машины (ЭВМ), мониторов, клавиатуры, графического манипулятора, принтера и загруженного программного обеспечения, включающего операционную систему, например, Windows, и специального программного обеспечения (СПО), в том числе программные компонент программы для ЭВМ «Программный комплекс ВР-НТ», свидетельство №2023612545.
Сервер 4 содержит взаимосвязанные по средствам шины данных блок 15 баз данных, блок 16 моделирования движения судна, блок 17 моделирования работы систем и устройств судна, блок 18 моделирования работы систем и устройств СУДС/ЦДУ, не менее одного блока 19 взаимодействия с РМО ходового мостика (количество блоков 19 соответствует количеству РМО 1 ходового мостика), блок 20 взаимодействия с РМО СУДС/ЦДУ, блок 21 моделирования навигационной обстановки и блок 22 моделирования внешних возмущений.
Сервер 4 может представлять собой набор стандартного специализированного оборудования загруженного программного обеспечения, включающего операционную систему, например, Windows, и СПО, в том числе программные компоненты программы для ЭВМ «Программный комплекс ВР-НТ» (свидетельство №2023612545), программу для ЭВМ «Платформы моделирования безэкипажного судовождения (ПМБС)» (URL: https://rb.ru/news/sitronics-kt-predstavil-trenazher/). программу для ЭВМ «Программный комплекс отображения оборудования ходового мостика в виртуальной среде шлема в режиме реального времени» (свидетельство №2023612511) и программу для ЭВМ «Программный комплекс отображения оборудования ЦДУ/СУДС в виртуальной среде шлема в режиме реального времени» (свидетельство №2023612525).
Блок 15 баз данных сервера 4 обеспечивает целостность и сохранность данных при их хранении, а также операциях ввода-вывода при доступе к информации. Блок 15 баз данных содержит совокупность, по крайней мере, следующих баз данных: база данных математических моделей судов, картографическая база данных районов моделирования, база данных стандартных географических моделей, база данных упражнений, база данных визуальных параметров объектов, база данных звуковых параметров объектов, база данных эксплуатационных параметров судов, база данных параметров метеообстановки, база данных навигационной обстановки, база данных отказов бортового оборудования, база данных моделей счисления координат и информационно-справочный модуль ГМССБ.
Блок 16 моделирования движения судна сервера 4 обеспечивает моделирование параметров движения судна исходя из выбранной математической модели собственного судна, параметров внешних возмущений, поступающих из блока 22 моделирования внешних возмущений, и управляющих сигналов, поступающих с устройств и систем имитатора 6 рабочего места судоводителя.
Блок 17 моделирования работы систем и устройств судна сервера 4 обеспечивает имитацию функционирования устройств и систем ходового мостика имитатора 6 рабочего места судоводителя.
Блок 18 моделирования работы систем и устройств СУДС/ЦДУ сервера 4 обеспечивает имитацию функционирования устройств и систем работу имитатора 8 рабочего места оператора СУДС/ЦДУ в режимах «СУДС» и «ЦДУ движением МАНС».
Блок 19 взаимодействия с РМО ходового мостика сервера 4 обеспечивает 3D-визуализацию устройств и систем ходового мостика и взаимодействие с устройствами имитатора 6 рабочего места судоводителя, включающую потоковую трансляцию в шлем 7 виртуальной реальности РМО ходового мостика аудиовизуальных данных, формируемых в процесс работы ВР-НТ, эмуляцию органов управления ходового мостика и передачу управляющих воздействий для реализации высокоточной системы позиционирования в пределах ходового мостика.
Блок 20 взаимодействия с РМО СУДС/ЦДУ сервера 4 обеспечивает 3D-визуализацию оборудования РМО и взаимодействие с оборудованием имитатора 8 рабочего места оператора СУДС/ЦДУ, включающую потоковую трансляцию в шлем 9 виртуальной реальности РМО СУДС/ЦДУ аудиовизуальных данных, формируемых в процесс работы ВР-НТ, эмуляцию органов управления операторов СУДС/ЦДУ, передачу управляющих воздействий для реализации высокоточной системы позиционирования в пределах ходового СУДС/ЦДУ.
Блок 21 моделирования навигационной обстановки сервера 4 обеспечивает моделирование положения и динамики других судов.
Блок 22 моделирования внешних возмущений сервера 4 обеспечивает моделирование параметров ветра, волнения водной поверхности и течения, расположение светил, особенности акватории.
Локальная вычислительная сеть 5 обеспечивает объединение элементов ВР-НТ в единую информационную сеть с использованием средств проводной связи.
Навигационный тренажер работает следующим образом.
Работа ВР-НТ обеспечивается в любом сочетании РМО. С помощью конфигуратора 12 тренажера инструктор с рабочего места 3 задает конфигурацию работы ВР-НТ, вводит в соответствии со сценарием упражнения заранее подготовленные исходную обстановку и задания для каждого РМО, при необходимости редактирует их. По ЛВС 5. задания распространяются на каждый РМО, а параметры исходной обстановки, соответствующие сценарию упражнения, в том числе измененные инструктором, из блока 15 баз данных загружаются в блоки 16, 17, 18, 19, 20, 21, 22 сервера 4. Далее каждый обучаемый на своем РМО осуществляет выполнение задания. Сервер 4 обеспечивает функционирование всех РМО в едином информационном пространстве. В ходе выполнения упражнения обучаемыми инструктор с РМИ 3 при необходимости вносит изменения, а также контролирует выполнение заданий и упражнения в целом. После завершения упражнения инструктор проводит анализ действий обучаемых.
Заявленное изобретение реализовано в опытном образце навигационного тренажера по а-Навигации и е-Навигации на основе технологий виртуальной реальности, обладающего расширенными функциональными возможностями, которые в совокупности позволяют реализовать индивидуальное и групповое обучение судоводителей конвенционных судов и МАНС, операторов ЦДУ и СУДС в районах функционирования МАНС, отработку совместных действий специалистов в едином информационном пространстве данных с учетом отрабатываемых задач в условиях реализации а-Навигации и е-Навигации, а также повысить качества визуализации окружающей и навигационной обстановки, адекватной реальной и сформированной с учетом отрабатываемых задач в условиях реализации а-Навигации и е-Навигации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажерный комплекс для подготовки судоводителей | 2017 |
|
RU2657708C1 |
| МОРСКОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ТРЕНАЖЕР | 2003 |
|
RU2251157C2 |
| ТРЕНАЖЁРНЫЙ ЦЕНТР ДЛЯ ЭКИПАЖЕЙ СУДОВ | 2016 |
|
RU2632675C2 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2007 |
|
RU2346337C1 |
| Тренажер для парашютно-спасательной подготовки летного состава авиации | 2022 |
|
RU2792911C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОГО ОБУЧЕНИЯ НАВЫКАМ ПОИСКА И ОБЛОВА РЫБЫ И МОРСКИХ БЕСПОЗВОНОЧНЫХ, ПОЛОЖИТЕЛЬНО РЕАГИРУЮЩИХ НА СВЕТ | 2009 |
|
RU2436168C2 |
| Судоводительский тренажер | 1989 |
|
SU1808136A3 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Тренажерное устройство имитации полета с виртуальной визуализацией | 2021 |
|
RU2784513C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВИРТУАЛЬНЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПОДГОТОВКИ ОБУЧАЮЩИХСЯ В ОБЛАСТИ ОБЕСПЕЧЕНИЯ ПОЖАРНОЙ БЕЗОПАСНОСТИ И ЗАЩИТЫ НАСЕЛЕНИЯ И ТЕРРИТОРИЙ ОТ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2023 |
|
RU2816401C1 |
Навигационный тренажер содержит объединенные локальной вычислительной сетью (ЛВС) рабочие места обучаемых (РМО) ходового мостика, РМО системы управления движением судов и центра дистанционного управления (СУДС/ЦДУ), рабочее место инструктора (РМИ), сервер. Каждое из РМО ходового мостика содержит имитатор рабочего места судоводителя и шлем виртуальной реальности оператора ходового мостика. РМО СУДС/ЦДУ содержит имитатор рабочего места оператора СУДС/ЦДУ и шлем виртуальной реальности оператора СУДС/ЦДУ. РМИ содержит взаимосвязанные по средствам шины данных блок управления, блок отображения, конфигуратор тренажера, редактор сценариев, блок печати и представляет собой набор стандартных аппаратных средств в виде электронно-вычислительной машины (ЭВМ), мониторов, клавиатуры, графического манипулятора, принтера и загруженного программного обеспечения. Сервер содержит взаимосвязанные по средствам шины данных блок баз данных, блок моделирования движения судна, блок моделирования работы систем и устройств судна, блок моделирования работы систем и устройств СУДС/ЦДУ, не менее одного блока взаимодействия с РМО ходового мостика, количество которых соответствует количеству РМО ходового мостика, блок взаимодействия с РМО СУДС/ЦДУ, блок моделирования навигационной обстановки, блок моделирования внешних возмущений. Обеспечивается расширение функциональных возможностей тренажера, связанное с возможностью индивидуального и группового обучения судоводителей. 4 з.п. ф-лы, 1 ил.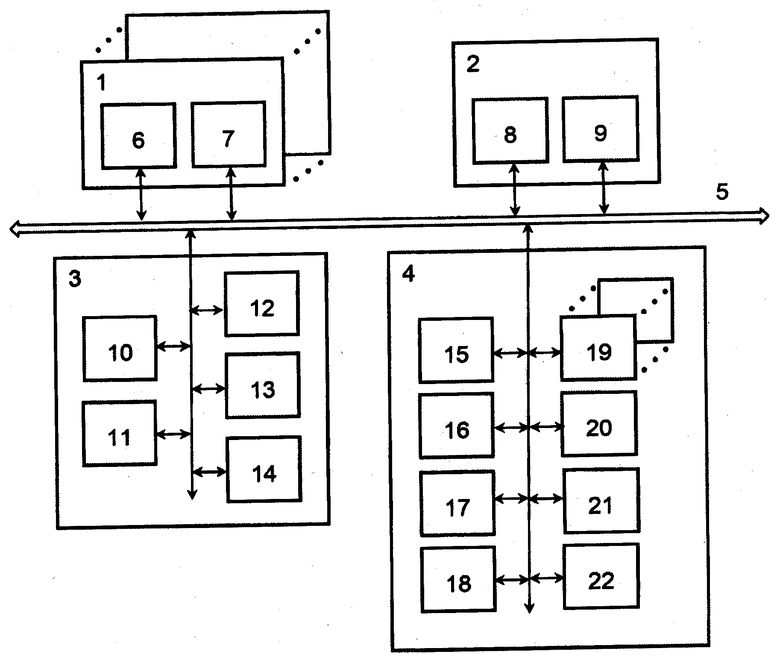
1. Навигационный тренажер, содержащий объединенные локальной вычислительной сетью (ЛВС) не менее одного рабочего места обучаемого (РМО) ходового мостика, рабочее место инструктора (РМИ), включающего взаимосвязанные шиной данных блок управления, блок отображения, конфигуратор тренажера, редактор сценариев и блок печати, и сервер, включающий блок баз данных, отличающийся тем, что в состав тренажера включено РМО системы управления движением судов и центра дистанционного управления (СУДС/ЦДУ), включающее имитатор РМО СУДС/ЦЦУ и шлем виртуальной реальности РМО СУДС/ЦДУ, соединенные с ЛВС, РМО ходового мостика включает имитатор рабочего места судоводителя и шлем виртуальной реальности РМО ходового мостика, соединенные с ЛВС, а в сервер дополнительно включены блок моделирования движения судна, блок моделирования работы систем и устройств судна, блок моделирования работы систем и устройств СУДС/ЦДУ, не менее одного блока взаимодействия с РМО ходового мостика, блок взаимодействия с РМО СУДС/ЦДУ, блок моделирования навигационной обстановки и блок моделирования внешних возмущений, причем все блоки сервера объединены шиной данных.
2. Тренажер по п. 1, отличающийся тем, что блок баз данных содержит совокупность следующих баз данных: база данных математических моделей судов, картографическая база данных районов моделирования, база данных стандартных географических моделей, база данных упражнений, база данных визуальных параметров объектов, база данных звуковых параметров объектов, база данных эксплуатационных параметров судов, база данных параметров метеообстановки, база данных навигационной обстановки, база данных отказов бортового оборудования, база данных моделей счисления координат, информационно-справочный модуль ГМССБ.
3. Тренажер по п. 1, отличающийся тем, что органы управления, входящие в состав имитатора РМО ходового мостика, размещены в штатном варианте, а приборное оборудование выполнено в виде имитаторов, отображаемых на экранах, или реальных приборов.
4. Тренажер по п. 1, отличающийся тем, что оборудование, входящие в состав имитатора РМО СУДС/ЦДУ, повторяет внешний вид и расположение элементов штатного оборудования и выполнено в виде имитаторов, отображаемых на экранах, или реального оборудования.
5. Тренажер по п. 1, отличающийся тем, что блок моделирования внешних возмущений выполнен с возможностью моделирования параметров ветра, волнения водной поверхности и течения, расположения светил, особенностей акватории.
| Тренажерный комплекс для подготовки судоводителей | 2017 |
|
RU2657708C1 |
| МОРСКОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ТРЕНАЖЕР | 2003 |
|
RU2251157C2 |
| ТРЕНАЖЁРНЫЙ ЦЕНТР ДЛЯ ЭКИПАЖЕЙ СУДОВ | 2016 |
|
RU2632675C2 |
| CN 103680248 A, 26.03.2014 | |||
| WO 2013064903 A2, 10.05.2013 | |||
| US 10712159 B2, 14.07.2020. | |||

