Изобретение относится к тренажерной технике, предназначено для обучения, тренировки и повышения квалификации судоводителей морского флота. Целью изобретения является повышение эффективности применения тренажеров при подготовке операторов.
Известен судоводительский тренажер по SU 1808136 A3, 07.04.1993, содержащий пульты обучаемого и инструктора, взаимосвязанные с моделью управляемого судна, блок сравнения, первый и второй входы которого соединены соответственно с выходами модели управляемого судна и запоминающего устройства, модель навигационной обстановки, взаимосвязанную с пультом инструктора и моделью управляемого судна и подключенную к входу блока преобразования, выход которого служит для подключения к системе визуализации, и блок аварийной сигнализации, вход и выход которого соединены соответственно с выходом блока сравнения и входом пульта обучаемого, при этом модель управляемого судна взаимосвязана с запоминающим устройством и подключена к выходу блока сравнения.
Недостатками вышеуказанного тренажера являются отсутствие блока документирования результатов обучения, модели обучаемого, содержащей особенности текущего состояния знаний и умений обучаемого, средств адаптации обучающей программы под конкретного пользователя на основе модели обучаемого, автоматической системы, с помощью которой сопоставляются результаты принятия решений человека - оператора и имитационных моделей, интеллектуального интерфейса, осуществляющего поддержание взаимодействия обучаемого и руководителя обучения с другими блоками тренажера.
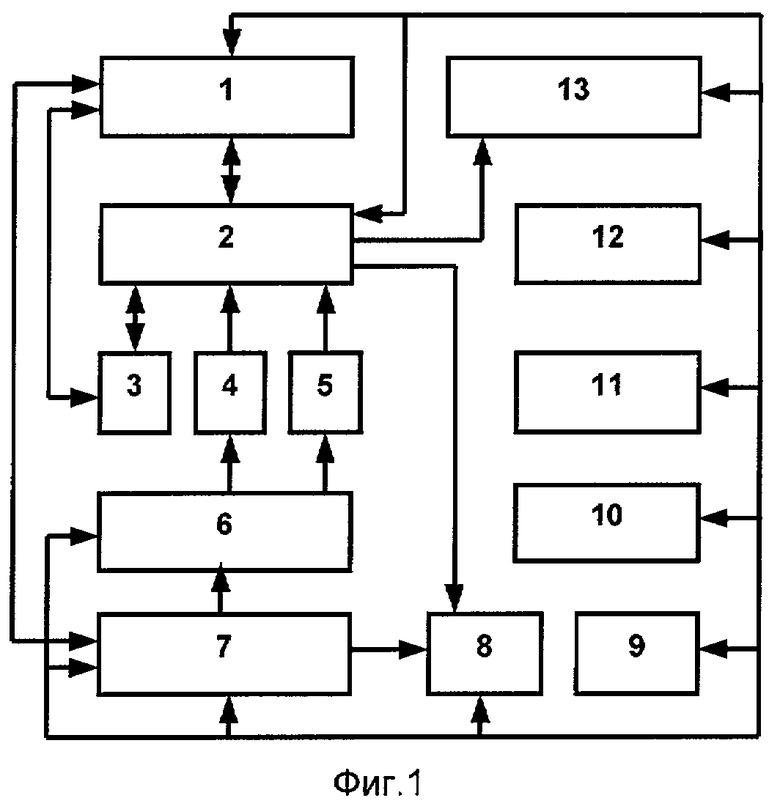
На фиг.1 изображена структурная схема интеллектуального тренажера.
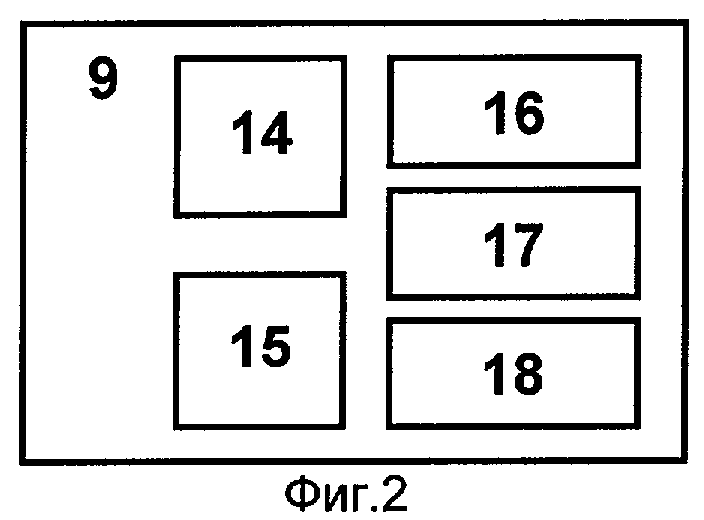
На фиг.2 изображена структурная схема модели обучаемого.
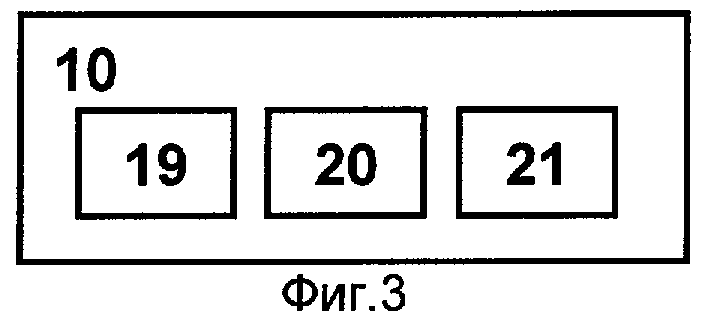
На фиг.3 изображена структурная схема средств адаптации.
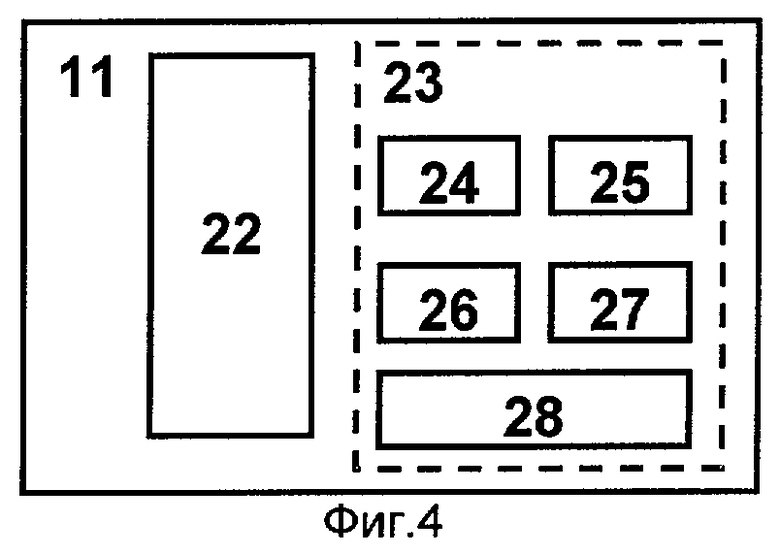
На фиг.4 изображена структурная схема автоматической системы.
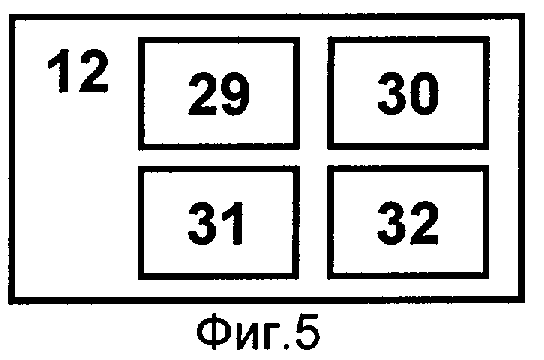
На фиг.5 изображена структурная схема интеллектуального интерфейса.
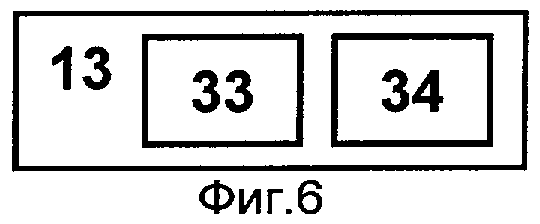
На фиг.6 изображена структурная схема блока документирования.
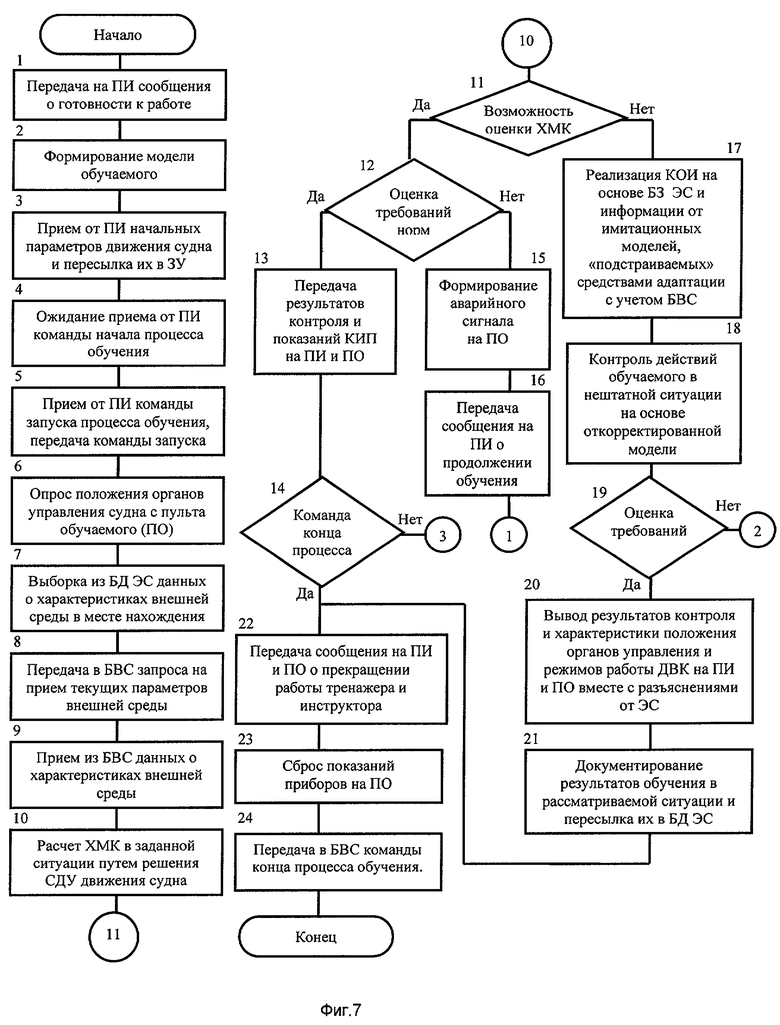
На фиг.7 изображена блок-схема функционирования тренажера.
Морской интеллектуальный тренажер (фиг.1) представляет собой проблемно-ориентированный программно-технический комплекс на базе рабочей станции для систематизации и обработки знаний в вычислительной среде с помощью интеллектуального интерфейса и диалогового режима, включающий технологию экспертных систем и средства визуализации, средства математического моделирования и процедуры, поддерживающие в режиме диалога автоматизированные циклы обучения и контроля знаний обучаемых по безопасности мореплавания, и позволяющий обеспечить необходимое качество процедур обучения.
На фиг.1 показана блок-схема тренажера. Устройство представляет собой проблемно-ориентированный программно-технический комплекс на базе рабочей станции и персональных ЭВМ для систематизации и обработки знаний в вычислительной среде с помощью интеллектуального интерфейса и диалогового режима, включающий технологию экспертных систем и систем виртуальной реальности, средства математического моделирования и процедуры, поддерживающие в режиме диалога автоматизированные циклы обучения и контроля знаний операторов судовых систем поддержки принятия решений по безопасности мореплавания, и позволяющий обеспечить необходимое качество процедур обучения.
Тренажер (фиг.1) включает рабочие места обучаемых 1, снабженные средствами взаимодействия с виртуальной средой 3, блок моделирования 2, блок генерации виртуальной реальности 3, блок характеристик судна 4, блок внешней среды 5, блок программного управления 6, блок руководителя обучения 7, блок оценки действий обучаемого 8, блок модели обучаемого 9, средства адаптации 10, автоматическую систему 11 и блок интеллектуального интерфейса 12, блок документирования результатов обучения 13.
Рабочее место обучаемого (пульт обучаемого) 1 представляет собой набор стандартных аппаратных средств взаимодействия с виртуальной средой в виде специальных очков, шлемов, перчаток, костюмов и т.п. Пульт обучаемого 1 взаимосвязан с блоком моделирования 2, средствами виртуальной реальности 3 и блоком руководителя обучения 7. Пульт обучаемого 1 состоит из внешних регистров, усилителей сигналов, индикаторов контрольно-измерительных приборов, датчиков положения, рукояток органов управления, звукового сигнального устройства для выдачи звуковых сигналов и импульсного источника света для указания обучаемому ситуаций, связанных с ухудшением мореходных качеств судна в штормовых условиях. Индикаторы контрольно-измерительных приборов последовательно соединены через усилители сигналов и внешние регистры с входом пульта обучаемого 1, а рукоятки органов управления через датчики положения, усилители сигналов и внешние регистры - с выходом пульта обучаемого 1, причем указанные входы и выходы пульта обучаемого 1 соединены с блоком моделирования 2, средствами визуализации 3 и блоком руководителя обучения 7, а с помощью интеллектуального интерфейса 12 - с выходами блока 8 и моделью обучаемого 10. Входы звукового сигнального устройства и импульсного источника света соединены с выходами блока 3 системы виртуальной реальности.
Блок 2 моделирования является основным функциональным блоком, в котором с помощью математических моделей в виде систем нелинейных детерминированных и стохастических дифференциальных уравнений гидроаэродинамических сил и моментов производится имитационное моделирование динамики судна под воздействием внешних возмущений в различных условиях эксплуатации, в том числе и в экстремальных ситуациях, связанных с ухудшением мореходных качеств судна. Математические модели определяют динамику взаимодействия судна с внешней средой в штормовых условиях: резкое снижение остойчивости при положении судна лагом к волнению и на попутном волнении, “захват” и внезапный разворот судна на волнении (брочинг), резкая качка судна в режимах основного и параметрического резонанса, слеминг, интенсивная заливаемость, удар в борт разрушающейся волны при движении судна на мелководье и на глубокой воде. Решение ведется численным интегрированием нелинейных дифференциальных уравнений с постоянным шагом. Коэффициенты уравнений определяются конструктивными и гидроаэродинамическими характеристиками судна, его нагрузкой, параметрами навигационной среды (волнением, ветром, глубиной воды, течением) и положением органов управления на пульте обучаемого. Входными данными блока моделирования 2 являются команды, поступающие от руководителя обучения 7 через блок программного управления 6, позволяющий изменять начальные условия и параметры движения судна и формировать в блоках 4 и 5 исходную информацию о нагрузке судна и состоянии внешней среды. Выходные данные блока 2, представляющие собой особенности поведения судна в рассматриваемой ситуации, поступают в блок средств виртуальной реальности, а результаты оценки мореходных качеств, а также мероприятия по сохранению безопасности судна, предложенные обучаемым, передаются в блоки оценки действий обучаемого 8 и документирования результатов обучения 13 и на рабочее место обучаемого 1.
Блок 3 средств виртуальной реальности получает исходную информацию от блока моделирования 2 и представляет собой инструментальную среду, поддерживающую комплекс программно-аппаратных средств взаимодействия с виртуальной средой, программные и операционные системы различной конфигурации, включающие необходимые сенсорные системы, а также системы звуковой и световой сигнализации.
Блок характеристик судна 4 функционирует от блока 6 программного управления и содержит базу данных параметров формы корпуса и нагрузки судна, данные о величине собственных и присоединенных моментов инерции, присоединенных массах, коэффициентах демпфирования, восстанавливающих компонентах и других коэффициентах дифференциальных уравнений, описывающих поведение судна в штормовых условиях.
Блок внешних условий 5 функционирует от блока программного управления и содержит базу данных о статистических характеристиках и режимах волнения и ветра в заданных районах плавания, наличии течения и ограниченности глубины, особенностях возникновения экстремальных волн и ветровых воздействий.
Блок программного управления 6 осуществляет формирование состояния нагрузки судна и характеристик внешней среды в блоках 4 и 5 и обеспечивает по заданной программе управление процессом взаимодействия судна с внешней средой в блоке моделирования 2 на основе средств виртуальной реальности 3. С помощью средств адаптации 10 блок программного управления 6 осуществляет “подстройку” математических моделей блока 2 в условиях непрерывного изменения динамики судна и внешней среды, а также адаптацию обучающей программы под конкретного пользователя на основе модели обучаемого 9.
Блок 7 руководителя обучения содержит контроллер пульта, дисплей и клавиатуру и служит для формирования процедур, описывающих режимы обучения, и осуществления управления процессом обучения на основе адаптируемых к определенным задачам автоматизированных циклов обучения и оценки степени подготовленности обучаемого путем задания экстремальных ситуаций, внешних условий и нагрузки судна. В процессе обучения блок 7 проводит анализ оценки знаний обучаемого, выполненный в блоке 8, и принимает решения о продолжении процесса обучения. Руководитель обучения 7 может остановить процесс обучения для объяснения особенностей задачи или исправления ошибок обучающегося с последующим продолжением тренировки.
Блок 8 оценки действий обучаемого получает сигналы от блока моделирования 2 и блока руководителя обучения 7. Блок 8 производит анализ реакции обучаемого и сопоставление результатов обучения с решением, полученным в блоке руководителя обучения 7 на основе текущих параметров, характеризующих мореходные качества судна в рассматриваемой ситуации с критериями Российского Регистра Судоходства, а также с допустимыми величинами, определяемыми требованиями, заложенными в проекте конкретного судна. В случае неправильных действий обучаемого блок 8 с помощью интеллектуального интерфейса 12 передает в систему виртуальной реальности 3 информацию для выработки звукового сигнала, передаваемого на рабочее место обучаемого 1.
Блок 9 модели обучаемого (фиг.2) функционирует на базе интеллектуального интерфейса 12 и с помощью рабочей станции 22 и экспертной системы 23 обрабатывает данные, поступающие от пультов обучаемого 1 и руководителя обучения 7. Блок 9 модели обучаемого включает пять модулей: первый модуль 14 содержит индивидуальные особенности обучаемого, второй модуль 15 содержит текущее состояние знаний и умений обучаемого, третий модуль 16 - требования к начальному и заключительному состоянию модели обучаемого, четвертый модуль 17 - типичные ошибки и когнитивные механизмы, пятый модуль 18 - психофизиологические особенности взаимодействия обучаемого с инструктором, которые формируются в процессе выполнения действий на предъявляемые в блоках моделирования 2 экстремальные ситуации и используются при организации и корректировке процесса обучения.
Блок 10 средств адаптации (фиг.3) с помощью интеллектуального интерфейса 12 взаимосвязан с блоком программного управления 6 и с блоком моделирования 2. Блок средств адаптации 10 содержит два основных блока, первый из которых 19 осуществляет “подстройку” математических моделей взаимодействия судна с внешней средой в нештатных ситуациях, особенно в условиях непрерывного изменения динамики судна и внешней среды, формируемых в блоке моделирования 2, второй блок 20 реализует адаптацию обучающей программы под конкретного пользователя на основе модели обучаемого 9, экспертной системы 22 и интеллектуального интерфейса 12.
Автоматическая система 11 (фиг.4) функционирует с помощью интеллектуального интерфейса 12 и получает информацию от блока рабочих мест обучаемых 1, блока моделирования 2 и блока руководителя обучения 7, обеспечивает работу блоков модели обучаемого 9 и средств адаптации 10. Автоматическая система 11 включает экспертную систему 23, содержащую базу знаний 24, механизм логического вывода 25, систему объяснений 26, базу данных 27 и управляющую компоненту 28, реализованные на базе рабочей станции 22. Экспертная система 23 при контроле действий обучаемого 1 в нештатных ситуациях (оценка мореходных качеств в этих ситуациях не предусмотрена действующими нормативами) использует концепцию “оптимального инструктора”, которая реализуется механизмом логического вывода 25 и предусматривает параллельный анализ задачи, предлагаемой обучаемому, с помощью встроенных процедур логической системы базы знаний 24, обрабатывающей текущую информацию от функционирующих в блоке моделирования 2 имитационных моделей, “подстраиваемых” средствами адаптации 10 с учетом моделей внешнего воздействия, реализуемых в блоке внешней среды 5. Результаты оценки действий обучаемого на основе концепции “оптимального инструктора” выводятся на пульт руководителя обучения 7 и пульт обучаемого 1 и сопровождаются необходимыми разъяснениями, полученными на основе функционирования системы объяснений 26 экспертной системы 23 и обеспечивающими привитие обучаемому умений и навыков профессиональной деятельности. С помощью экспертной системы 23 и данных, поступающих от блока моделирования 2, пульта руководителя обучения 7 и модели обучаемого 9, в блоке документирования результатов обучения 13 осуществляется обработка результатов обучения и автоматизированное формирование электронных ведомостей, содержащих общие сведения о результатах тренировки и соответствующие протоколы для каждого обучаемого, которые хранятся в базе данных 27 экспертной системы 23.
Интеллектуальный интерфейс 12 (фиг.5) представляет собой программно-аналитический комплекс, обеспечивающий “прозрачность” смысла доступа к информации при поддержании взаимодействия блока обучаемого 1 с помощью автоматической системы 11 с пультом руководителя обучения 7, блоком программного управления 6, блоком модели обучаемого 9, средствами адаптации 10 и блоком документирования 13. Интеллектуальный интерфейс 12 ориентирован на формализацию понятий предметной области, связанной с контролем мореходных качеств судов в различных условиях эксплуатации, и включает четыре основных модуля: синтаксический анализатор 29, выполняющий процедуры морфологического и синтаксического анализа и реализующий синтаксический граф для предложений входного текста, семантический анализатор 30, использующий результаты синтаксического анализа для построения графа, формализующего информационное содержание входного текста, процессор понятийного словаря 31, представляющий собой библиотеку функций, обеспечивающих вычисление характеристик, представленных в словаре понятий, и полный набор отношений между ними, а также фиксированный набор ассоциативных отношений вида “часть - целое”, “устройство - функция”, процессор справочника баз данных 32, который характеризует модели предметных областей, определяющих функционирование пульта обучаемого 1, пульта инструктора 7, моделей характеристик судна 4 и внешней среды 5, блока моделирования 2, обеспечивающего работу средств виртуальной реальности 3, блока программного управления 6, модель обучаемого 9, средства адаптации 8, автоматическую систему 10. В нештатных ситуациях блок оценки действий обучаемого 8 не может обеспечить оценку ситуации на базе действующих нормативов, определенных требованиями Российского Регистра Судоходства, а также критическими величинами, заложенными в проекте конкретного судна. С помощью интеллектуального интерфейса 12 в нештатных ситуациях реализуется взаимосвязь блоков средств адаптации 10 и автоматической системы 11, обеспечивающих интеллектуальные возможности тренажера с помощью экспертной системы 23. В отдельных случаях экспертная система 23 также может испытывать затруднения при реализации логического вывода, осуществляемого блоком 25, из-за несрабатывания логических правил при недостаточной исходной информации. Функции интеллектуального интерфейса 12 в этих условиях заключаются в обеспечении обучаемого всей необходимой информацией, накапливаемой в базе данных 26 в процессе проведения тренировок при решении сложных задач анализа и интерпретации физических картин поведения судна в нештатных ситуациях, в том числе и при принятии обучаемым нестандартного решения задачи, свидетельствующего о творческом подходе к обучению при поиске решения при анализе динамических ситуаций, реализуемых средствами виртуальной реальности 3 на основе данных, поступающих от блока моделирования 2 и внешней среды 5.
Блок документирования 13 (фиг.6) получает информацию от блока моделирования 2 и функционирует на основе автоматической системы 11 с помощью интеллектуального интерфейса 12. Блок документирования 13 содержит два модуля. Первый модуль 33 обеспечивает документирование результатов обучения на основе автоматизированного формирования электронных ведомостей, содержащих общие сведения о результатах тренировки. Второй модуль 34 формирует соответствующие протоколы для каждого обучаемого.
Процесс обучения на морском интеллектуальном тренажере состоит в выполнении циклов обучения, связанных с последовательном предъявлением обучаемому различных ситуаций, связанных с взаимодействием судна с внешней средой в штормовых условиях, и контроле его действий при выборе режимов управления судном.
Функционирование морского интеллектуального тренажера в целом определяется работой автоматической системы 10 с помощью экспертной системы 23 и управляющей компоненты 28, а также интеллектуального интерфейса 12, модели обучаемого 9 и средств адаптации 8, обеспечивающих работу блока моделирования 2. Взаимодействие указанных блоков с остальными частями тренажера в зависимости от особенностей рассматриваемой ситуации описывается на основе алгоритма функционирования следующим образом.
После включения морского интеллектуального тренажера с помощью автоматической системы 11 начинают выполняться циклы обучения, определяющие динамику взаимодействия судна с внешней средой в различных ситуациях, в каждой из которых осуществляются следующие действия (фиг.7):
передача на пульт инструктора (ПИ) блока руководителя обучения 7 сообщения о готовности к работе;
формирование модели обучаемого 9 на основе тестирования его знаний и умений, а также определения его индивидуальных особенностей с помощью экспертной системы (ЭС) 23, по результатам которого на пульт инструктора 7 подается сообщение о готовности к работе;
прием от пульта инструктора 7 начальных параметров движения судна (координат положения, направление курса, скорости, загрузки судна) и пересылка этих параметров в базу данных (БД) 27 ЭС 23;
ожидание приема от ПИ 7 команды начала процесса обучения;
прием от пульта инструктора 7 команды запуска процесса обучения, передача команды запуска процесса в автоматическую систему 11, формирующую с помощью экспертной системы 23 модель экстремальной ситуации (МЭС), которая передается на пульт инструктора 7 и в блок программного управления 6;
опрос положения органов управления судна с пульта обучаемого (ПО)1;
выборка из БД 27 ЭС 23 данных о характеристиках волнения и ветра, глубине акватории и течении в месте нахождения судна;
передача в блок внешней среды (БВС) 5 запроса на прием текущих параметров внешней среды;
прием из блока внешней среды 5 данных о параметрах волнения и ветра, условиях видимости, глубине акватории, скорости и направлении течения;
расчет характеристик мореходных качеств (ХМК) в заданной ситуации путем решения системы дифференциальных уравнений (СДО) движения судна;
проверка возможности оценки характеристик мореходных качеств на основе действующей системы нормирования;
если процедура может быть выполнена, осуществляется проверка соответствия требований к мореходным качествам;
в случае выполнения требований результаты контроля действий обучаемого вместе с показаниями контрольно-измерительных приборов (КИП) передаются на пульт инструктора 7 и пульт обучаемого 1;
при невыполнении требований формируется аварийный сигнал на пульте обучаемого 1 и передается сообщение на пульт инструктора 7 и пульт обучаемого 1 о повторном продолжении процесса обучения по исследуемой ситуации;
если процедура оценки характеристик мореходности на основе действующих нормативов не может быть выполнена, то с помощью базы знаний 24 экспертной системы 23 в блоке автоматической системы 11 реализуется “концепция оптимального инструктора” (КОИ);
осуществляется контроль действий обучаемого 1 в нештатной ситуации с использованием концепции “оптимального инструктора” на основе откорректированной в блоке моделирования 2 математической модели с использованием средств адаптации 10 и базы знаний 24 экспертной системы 23;
при выполнении требований к безопасности судна в нештатной ситуации результаты контроля действий обучаемого вместе с характеристиками положения органов управления и режимов работы двигательно-рулевого комплекса выводятся на пульт руководителя обучения 7 и пульт обучаемого 1 и сопровождаются необходимыми разъяснениями, полученными на основе функционирования системы объяснений 26 экспертной системы 23;
при невыполнении требований к безопасности судна в нештатной ситуации передается сообщение на пульт инструктора 7 и пульт обучаемого 1 о повторном проведении тренировки по исследуемой ситуации;
осуществляется документирование результатов обучения по рассматриваемой ситуации, которые хранятся в базе данных 27 экспертной системы 23;
передача сообщения на пульт инструктора 7 о продолжении обучения;
проверка, была ли получена из пульта инструктора 7 команда конца процесса обучения;
если нет, то переход к новому циклу обучения;
если да, то передача сообщения на пульт инструктора 2 и пульт обучаемого 3 о конце работы тренажера и прекращении работы инструктора;
сброс показаний приборов на пульте обучаемого 1;
передача в блок внешней среды 4 команды конца процесса обучения.
Тренажер работает следующим образом.
В блок моделирования 2 с пульта инструктора 7 из базы данных 27 экспертной системы 23 вводится тип судна, его параметры и данные по загрузке, а также гидродинамические и аэродинамические характеристики математической модели судна. В блок внешней среды 5 с пульта инструктора 7 из базы данных 27 экспертной системы 23 вводятся характеристики рассматриваемой ситуации: курс судна и навигационная обстановка (сила, скорость и направление волнения и ветра, глубина акватории, условия видимости).
С пульта 1 обучаемый органами управления задает ходовой режим двигателей и управляет движением судна в заданной ситуации, изменяя скорость судна и курсовой угол волны. В это время в результате взаимодействия контроллеров блока моделирования 2 и блока внешней среды 3 с помощью блока программного управления 6 вырабатываются управляющие сигналы для системы виртуальной реальности 3. В случае нарушения критериев безопасности, характеризующих данную ситуацию, блок оценки действий обучаемого 8 с помощью интеллектуального интерфейса 12 передает управляющий сигнал в блок моделирования 2 и средства виртуальной реальности 3, на основе которых вырабатываются соответствующие звуковые и световые сигналы на пульте обучаемого 1, а блок моделирования 2 имитирует динамическую картину, связанную с резким ухудшением мореходных качеств судна. В случае возникновении нештатных ситуаций, оценка мореходных качеств для которых не предусмотрена действующими нормативами (критериями), блок оценки действий обучаемого 8 передает управление на автоматическую систему 11, которая с помощью экспертной системы 23 реализует концепцию “оптимального инструктора”, осуществляя оценку ситуации с использованием “подстроенной” на основе средств адаптации 10 и блока моделирования 2, а также модели внешней среды 5 и блока программного управления 6, обеспечивающего работу системы виртуальной реальности 3. При этом система объяснения 26, входящая в состав экспертной системы 23, разъясняет обучаемому, почему было принято именно такое решение.
В результате использования предлагаемого изобретения на базе автоматической системы 11 формируется гибкое информационное пространство, включающее методы математического моделирования, настраиваемые адаптивные автоматизированные циклы обучения с учетом особенностей обучаемого и изменения его знаний и навыков в процессе обучения. Вычислительные операции предусматривают ускорение или замедление текущего времени процессов, характеризующих динамику судна на волнении, в зависимости от заданного масштаба времени.
Преимущества изобретения заключается в том, что функционирование предлагаемого морского интеллектуального тренажера в максимальной степени приближено к имитации реальных динамических сцен, особенно нештатных ситуаций, возникающих в процессе эксплуатации судна, что позволяет повысить эффективность использования тренажера при подготовке судоводителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЁРНЫЙ ЦЕНТР ДЛЯ ЭКИПАЖЕЙ СУДОВ | 2016 |
|
RU2632675C2 |
| СУПЕРКОМПЬЮТЕРНЫЙ КОМПЛЕКС ДЛЯ РАЗРАБОТКИ НАНОСИСТЕМ | 2009 |
|
RU2432606C2 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2007 |
|
RU2346337C1 |
| Способ контроля процесса эвакуации экипажа и пассажиров при возникновении морских катастроф | 2017 |
|
RU2658232C1 |
| МОРСКОЙ ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ, ТРЕНИРОВКИ И ПОВЫШЕНИЯ КВАЛИФИКАЦИИ ОПЕРАТОРОВ И СПЕЦИАЛИСТОВ ПО ПРИМЕНЕНИЮ ГИДРОФИЗИЧЕСКИХ КОМПЛЕКСОВ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ АНОМАЛИЙ ВОДНОЙ СРЕДЫ | 2010 |
|
RU2445710C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ОБУЧАЮЩАЯ СИСТЕМА | 2006 |
|
RU2310237C1 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОБУЧЕНИЯ | 2018 |
|
RU2697957C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОБУЧЕНИЯ ПЕРСОНАЛА МОРСКИХ НЕФТЕГАЗОДОБЫВАЮЩИХ ПЛАТФОРМ ДЕЙСТВИЯМ В ЭКСТРЕМАЛЬНЫХ И АВАРИЙНЫХ УСЛОВИЯХ | 2010 |
|
RU2455699C1 |
Изобретение относится к тренажерной технике и предназначено для обучения, тренировки и повышения квалификации судоводителей. Тренажер содержит рабочие места обучаемых, блок моделирования, блок руководителя обучения, блок оценки действий обучаемого, блок программного управления, блоки характеристик судна и внешней среды, средства виртуальной реальности, блок документирования результатов обучения, блок модели обучаемого, средства адаптации обучающей программы под конкретного пользователя и интеллектуальный интерфейс. При этом интерфейс осуществляет поддержание взаимодействия обучаемого и руководителя обучения с другими блоками тренажера, а результаты принятия решений человека - оператора и имитационных моделей сопоставляются с помощью автоматической системы. Изобретение позволяет повысить эффективность применения тренажеров путем моделирования динамики взаимодействия судна с внешней средой в различных условиях эксплуатации. 7 ил.
Интеллектуальный тренажер для обучения судоводителей методам принятия решений в экстремальных ситуациях, содержащий рабочие места обучаемых, соединенные с блоком моделирования и блоком руководителя обучения, связанного с блоком оценки действий обучаемого и блоком программного управления, сигналы от которого поступают на блоки характеристик судна и внешней среды, соединенные с блоком моделирования, сигналы от которого поступают в блок оценки действий обучаемого и средства виртуальной реальности, отличающийся тем, что в интеллектуальный тренажер введены блок документирования результатов обучения, в который поступают сигналы с блока моделирования, блок модели обучаемого, содержащий особенности текущего состояния знаний и умений обучаемого, которые используются при организации и корректировке процесса обучения, средства адаптации обучающей программы под конкретного пользователя на основе модели обучаемого, автоматическая система, с помощью которой сопоставляются результаты принятия решений человека-оператора и имитационных моделей, интеллектуальный интерфейс, осуществляющий поддержание взаимодействия обучаемого и руководителя обучения с другими блоками тренажера.
| Судоводительский тренажер | 1989 |
|
SU1808136A3 |
| УНИФИЦИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ АВИАЦИОННЫЙ ТРЕНАЖЕР | 1994 |
|
RU2087037C1 |
| Устройство для оценки работы рулевого | 1985 |
|
SU1406627A1 |
| US 6361321 B1, 26.03.2002 | |||
| US 4842520 А, 27.06.1989. | |||

