Заявляемое изобретение относится к программно-ориентированным учебно-техническим средствам и предназначено для использования при формировании профессиональных навыков операторов управления, преимущественно, подвижными объектами с морских технических средств.
Известны программно-ориентированные средства подготовки операторов (экипажей кораблей, летного состава, водителей транспортных средств и пр.) к действиям в штатных и нештатных ситуациях, в частности, тренажеры и тренажерные комплексы для подготовки операторов функциональных систем морских технических средств, таких как корабли, подводные аппараты и т.п., использующие в составе учебного пособия так называемую «виртуальную реальность», т.е. моделирующие с помощью вычислительных средств внешние условия, работу функциональных блоков и функциональные связи между ними в квазиреальном времени, действия оператора и обратные связи в системе «тренажер-инструктор-оператор» /например, US №№5147206, 5204968 5659691, EP №0656613/.
Целью такого обучения является выработка у операторов навыков управления функциональными системами объекта техники, управление процессом обучения больших групп операторов с заданием разнообразных ситуаций, моделирующих реальные условия использования систем объекта техники, возможность оценивания процесса обучения и т.д. /например, US 5204968, 6254394/.
Известен унифицированный многофункциональный авиационный тренажер /патент РФ №2087037, пр. 28.10.1994, публ. 10.08.1997/, содержащий вычислительную систему, унифицированное рабочее место инструктора (РМИ), комплекс унифицированных рабочих мест обучаемого (РМО) с числом рабочих мест по числу обучаемых в группе, экран коллективного пользования, устройство ввода информации, базу данных сценариев тренировок, базу данных результатов тренировок, причем каждое унифицированное РМО содержит дисплейный модуль обучаемого и модуль тренажа обучаемого, унифицированное РМИ содержит дисплейный модуль инструктора и модуль проведения спаренного тренажа, вычислительная система содержит программные модули реализации сценариев тренировки, объективного контроля обучаемого и объективного контроля инструктора. В силу специфики отрасли в процессе обучения не реализуются многосторонние взаимодействия обучаемых, что ограничивает объем приобретаемых ими навыков работы и моделей поведения в нештатных ситуациях. Кроме того, программные средства недостаточно защищены от несанкционированного доступа, что может привести к сбою в работе тренажера в целом.
Известен тренажерный комплекс для подготовки экипажей кораблей, а именно морской интеллектуальный тренажер /патент РФ №2251157, пр. 29.01.2003, публ. 27.04.2005, который содержит набор РМО, блок моделирования, блок руководителя обучения, блок оценки действий обучаемого, блок программного управления, блоки характеристик судна и внешней среды, средства виртуальной реальности, блок документирования результатов обучения, блок модели обучаемого, средства адаптации обучающей программы под конкретного пользователя и интеллектуальный интерфейс, с помощью которого обеспечивается взаимодействие обучаемого и руководителя обучения с другими блоками тренажера, а результаты принятия решений человека-оператора в отношении имитационных моделей сопоставляются с помощью автоматической системы. Известное устройство повышает эффективность применения тренажеров путем моделирования динамики взаимодействия судна с внешней средой в различных условиях эксплуатации. Недостатком известного устройства следует считать отсутствие средств защиты от несанкционированного доступа в систему.
Известный тренажерный комплекс для подготовки экипажей кораблей (п. №2251157 RU), включающий набор РМО по числу обучаемых, РМИ, интерфейс командного типа, интерфейс с пользователем, программную среду, выбран в качестве ближайшего аналога заявляемого изобретения.
Целью заявляемого изобретения является повышение надежности работы и степени защиты от несанкционированного доступа, а также повышение достоверности имитации процессов управления реальной системой в штатных и нештатных ситуациях.
Цель достигается тем, что в тренажерном комплексе для подготовки экипажей кораблей, включающем набор РМО по числу обучаемых, РМИ, интерфейс командного типа, интерфейс с пользователем, программную среду, в соответствии с изобретением, РМО содержит системный блок, периферийные устройства в составе пульта управления с устройством ввода данных (УВД), первым и вторым мониторами, причем пульт управления с УВД подключен к системному блоку через последовательный порт, а первый и второй мониторы - через аналоговый интерфейс пользователя RGB и цифровой интерфейс DVI, соответственно, а также блок коммутации электропитания, подключенный к пульту управления с УВД, первому и второму мониторам и через сетевой порт к системному блоку, РМИ содержит системный блок, периферийные устройства в составе клавиатуры с манипулятором, принтера и монитора, подключенных к системному блоку, соответственно, через последовательный порт, параллельный порт и видеоадаптер, а также концентратор линий связи, который посредством интерфейса командного типа связан с системными блоками РМИ и каждого РМО, выполненными по стандарту Ethernet, при этом РМИ и каждое РМО подключены параллельно к источнику бесперебойного питания, соединенному с внешним источником электропитания.
Кроме того, РМО подключено к источнику бесперебойного питания через блок коммутации электропитания.
Кроме того, блок коммутации электропитания подключен к системному блоку РМО через коммутационную панель, соединенную с системной платой системного блока РМО.
Кроме того, пульт управления выполнен в виде имитатора пульта управления оператора корабельной системы управления подвижными объектами.
Кроме того, УВД пульта управления включает клавиатуру с тактильным эффектом кнопок.
Кроме того, УВД пульта управления включает сенсорный манипулятор типа "Touch Pad".
Кроме того, УВД пульта управления снабжено замками блокировки электромеханического типа.
Кроме того, УВД управления включает индикаторы состояния пульта управления.
Кроме того, программная среда включает операционную систему Windows ХР Professional и библиотеку MSDN Library.
Кроме того, программная среда включает мультимедийный имитатор корабельной системы управления движением подвижными объектами и сопряженных с ним корабельных систем со встроенными штатными программами расчета траекторий движения тел.
Кроме того, программная среда включает базу данных ситуационных задач для проведения обучения.
Структура тренажерного комплекса для подготовки экипажей кораблей представлена на чертеже.
Тренажерный комплекс является многотерминальной компьютерной сетью, обслуживающей одновременно инструктора и группу обучаемых и работающей в многозадачном режиме. Построение компьютерной сети по стандарту Ethernet предусматривает соединение нескольких компьютеров с сетевыми адаптерами посредством кабелей или коммутационной панели и синхронизацию выдачи на него сигнала сетевых адаптеров (структурированная сеть).
Тренажерный комплекс для подготовки экипажей кораблей содержит набор РМО 1 по числу обучаемых и РМИ 2. Каждое РМО 1 содержит системный блок ПЭВМ 3, периферийные устройства в составе пульта управления 4 с устройством ввода данных (УВД) 5, первым 6 и вторым 7 мониторами, причем пульт управления 4 с УВД 5 подключен к системному блоку ПЭВМ 3 через последовательный порт 8, а первый 6 и второй 7 мониторы - через интерфейс пользователя - аналоговый интерфейс RGB 9 и цифровой интерфейс DVI 10. Блок коммутации электропитания 11 подключен к пульту управления 4 с УВД 5, первому 6 и второму 7 мониторам и через сетевой порт 12 к системному блоку ПЭВМ 3. Каждое РМО 1 подключено через блок коммутации электропитания 11 к источнику бесперебойного питания 13, подключенному к внешнему источнику электропитания (на схеме не показан).
РМИ 2 содержит системный блок ПЭВМ 14, периферийные устройства в составе клавиатуры 15 с манипулятором «Мышь» 16, принтера 17 и монитора 18, подключенных к системному блоку ПЭВМ 14, соответственно, через последовательный порт 19, параллельный порт 20 и видеоадаптер 21, а также концентратор линий связи 22, который связан с системным блоком ПЭВМ 14 РМИ 2 и посредством интерфейса командного типа 23 с системным блоком ПЭВМ 3 каждого РМО 1. Системные блоки ПЭВМ 3 и 14 выполнены по стандарту Ethernet. Устройства РМИ 2, а именно системный блок ПЭВМ 14, принтер 17, монитор 18 и концентратор линий связи 22, подключены к источнику бесперебойного питания 24, соединенному с внешним источником электропитания. Все подключения к источнику бесперебойного питания параллельны, что обеспечивает подачу одинакового напряжения на входы подключенных устройств.
Концентратор линий связи 22 предназначен для сжатия данных, которое применяется в целях экономии пространства на жестких дисках системного блока ПЭВМ 14 и увеличения скорости передачи данных по интерфейсу командного типа 23, в частности интерфейса SCSI для передачи данных по прямому доступу к памяти. Необходимость сжатия данных обусловлена характером учебного материала (мультимедийных ситуативных задач), который воспроизводится на мониторах 6 и 7 на РМО 1, подключенных к видеоадаптеру системного блока ПЭВМ 3 через интерфейс пользователя - аналоговый интерфейс RGB 9 (обеспечивающий цветопередачу изображения) и цифровой интерфейс DVI 10 - для приема цветного текстового и графического изображения. Для максимальной приближенности условий обучения к реальным условиям эксплуатации системы мониторы 6 и 7 на РМО 1 установлены аналогично экранам на посту оператора системы - один над другим.
В РМО 1 системный блок ПЭВМ 3 доукомплектован коммутационной панелью 25, через которую в системный блок ПЭВМ 3 поступает сигнал включения от блока коммутации электропитания 11. Коммутационная панель 25 устанавливается на свободное место, предназначенное для крепления планки дополнительного модуля к корпусу системного блока ПЭВМ 3. Жгут этой панели подключен к соединителю PWR SW системной платы 26, что обеспечивает включение системного блока ПЭВМ 3 от блока коммутации электропитания 11 или отключение системной платы 26 (в частности базового микропроцессора, оперативной памяти и др. от электропитания через источник бесперебойного питания 13 при блокировке РМО 1 от несанкционированного доступа.
На каждом компьютеризированном РМО 1 пульт управления 4 выполнен в виде имитатора пульта управления оператора корабельной системы управления подвижными объектами. УВД 5 пульта управления 4 подключено к системному блоку ПЭВМ 3 через последовательный порт 8, обычно предназначенный для подключения клавиатуры и манипулятора «Мышь». На УВД 5 расположены следующие органы управления РМО 1:
- кнопки «включено/выключено» (POWER ON/OFF), при помощи которых осуществляется включение/выключение устройств РМО 1 по электропитанию (на схеме не показаны);
- клавиатура, при помощи которой осуществляется задание режимов и ввод данных, необходимых для работы РМО 1 (на схеме не показана). В клавиатуре реализована матричная схема коммутации кнопок, обладающих тактильным эффектом срабатывания. Информация через клавиатуру передается в системный блок ПЭВМ 3 через последовательный порт 8 (Keyboard PS/2). На УВД 5 пульта управления 4 может быть использован сенсорный манипулятор типа "Touch Pad" (кодирующий планшет), повышающий скорость ввода данных в компьютер;
- замки блокировки электромеханического типа - «БЛОКИРОВКА ПИТАНИЯ» (LOCK POW), «БЛОКИРОВКА РЕЖИМА» (LOCK MODE), «БЛОКИРОВКА ОТМЕНЫ ПУСКА» (LOCK CANCEL LAUNCH), предотвращающие несанкционированный доступ к органам управления на УВД 5 (замки на схеме не показаны);
- индикаторы состояния (на схеме не показаны) пульта управления 4.
Электропитание УВД 5 бортовыми напряжениями постоянного тока 5 В и 27 В, а также по сигналу от УВД 5 других устройств РМО 1 (50 Гц - 220 В) производится от блока коммутации электропитания 11, который обеспечивает требуемые параметры их электропитания, а также реализует процедуру включения/выключения РМО 1 аналогично реальной корабельной системе управления подвижными объектами и формирует сигнал включения системного блока ПЭВМ 3.
При получении сигнала выключения от УВД 5 блок коммутации электропитания 11 перестает выдавать напряжение электропитания ˜50 Гц - 220 В на устройства РМО 1, однако напряжения постоянного тока 5 В и 27 В продолжают вырабатываться до тех пор, пока на блок 11 через источник бесперебойного питания 13 подается напряжение электропитания ˜50 Гц 220 В,
В блоке коммутации электропитания 11 обеспечена защита от короткого замыкания при помощи предохранителей.
На корпусе блока коммутации электропитания 11 имеются индикаторы «СЕТЬ» (PWR) и «ВКЛЮЧЕНО» (ON). Свечение индикатора «СЕТЬ» (PWR) показывает, что на блок коммутации электропитания 11 подано напряжение электропитания ˜50 Гц 220 В и он вырабатывает напряжения 5 В и 27 В. Свечение индикатора «ВКЛЮЧЕНО» (ON) показывает, что блок коммутации электропитания 11 выдает напряжение электропитания ˜50 Гц 220 В на устройства РМО 1.
РМО 1 и РМИ 2 представляют собой автоматизированные рабочие места на базе IBM-совместимых ПЭВМ с производительностью не ниже Pentium III. Информационное взаимодействие рабочих мест организовано на базе однородной локальной вычислительной сети по стандарту Fast Ethernet 100Base-TX IEEE 802.3u, что обеспечивает максимально возможную скорость передачи данных до 100 Мбит/с за счет сжатия информации при использовании концентратора, установленного на РМИ.
Программная среда, обеспечивающая работу тренажерного комплекса, включает встроенную операционную систему Windows XP. Программная среда, размещенная на внешних носителях информации (устройства для записи/чтения на оптических дисках), включающая мультимедийный имитатор корабельной системы управления движением подвижными объектами и сопряженных с ним корабельных систем со встроенными штатными программами расчета траекторий движения тел, базу данных ситуационных задач для проведения обучения с использованием возможностей операционной системы Windows XP Professional и библиотеки MSDN Library позволяет выполнять работы в соответствии с требуемой учебно-информационной моделью, подготовить тренажерный комплекс к работе в различных режимах обучения под контролем инструктора с имитацией реальных ситуаций, включая диалоговый режим, а также осуществлять запрет несанкционированного доступа в систему.
Тренажерный комплекс работает следующим образом. После включения комплекса в сеть инструктор на РМИ 2 с помощью клавиатуры 15 с манипулятором «Мышь» 16 выбирает из базы данных ситуационных задач для объектов управления, введенных в память системного блока ПЭВМ 14, определенную задачу. Видеосигнал через видеоадаптер 21 поступает на экран монитора 18 РМИ 2, и параллельно, через концентратор линии связи 22, кодирующий видеосигнал задания, и интерфейс 23 поступает на вход системного блока ПЭВМ 3 каждого РМО 1. Принятый сигнал поступает в оперативную память системного блока ПЭВМ 3, а именно на системную плату 26 и через интерфейс пользователя - на мониторы 6 и 7 РМО 1. Обучаемый в соответствии с заданием вводит требуемые данные (решение) через УВД 5 пульта управления 4 в системный блок ПЭВМ 3, и отправляет сигнал (решение) через интерфейс 23 на РМИ 2. Все РМО 1 работают независимо друг от друга, могут выполнять различные задания с возможностью синхронного поступления решений со всех РМО 1 на РМИ 2, что позволяет оценивать скорость принятия решений, их результативность и т.п. в динамике процесса обучения. Варьируя задания путем ввода различных параметров для расчета траекторий движения тел с использованием штатных программ расчета, инструктор добивается от обучаемых решения задач управления в штатных и нештатных ситуациях, вырабатывает навыки управления при наличии связи РМО 1 с РМИ 2. Использование мультимедийного имитатора реального пульта оператора управления движением объекта в среде позволяет стойко закрепить навыки управления реальной системой в различных ситуациях.
Тренировочные задания в условиях отключения электропитания с использованием блока коммутации электропитания 11 позволяют моделировать нештатные ситуации обесточивания системы управления движением и неполадок в сопряженных системах, выявляемых по индикаторам состояния пульта управления 4, при этом успешное решение заданий испытуемым (в условиях стресса) повышает надежность его работы в реальных условиях за счет приобретенной возможности прогнозировать результаты своих действий.
Полный комплекс заданий для подготовки на РМО 1 с использованием программной среды позволяет выполнить:
- моделирование процессов функционирования корабельной системы управления подвижными объектами по формированию заданий для объектов управления, проведению их подготовки и использованию по назначению, а также отображению информации, идентичной той, которая вырабатывается реальной системой управления во всех режимах ее работы;
- прием данных целеуказания, навигационной информации, а также данных о комплектации подвижных объектов по назначению, поступающих с РМИ 2 в соответствии с отрабатываемой учебной задачей;
- прием и выполнение команд управления, поступающих с пульта управления 4 через УВД 5;
- решение реальных функциональных задач корабельной системы управления подвижными объектами;
- документирование результатов работы, формирование донесений, идентичных вырабатываемым реальной системой управления и передача их на РМИ 2;
- контроль сохранности программного обеспечения РМО 1.
РМИ 2 обеспечивает выполнение следующих функций:
- контроль работоспособности тренажерного комплекса, его запуск и остановку;
- управление режимами работы тренажерного комплекса;
- управление режимами подготовки обучаемых;
- формирование, коррекция и наращивание базы данных учебных задач;
- запуск и остановка выполнения программ на РМО 1;
- подготовка и ввод начальных условий тренировки, их оперативное изменение и контроль вводимых величин;
- моделирование и передача индивидуальных для каждого РМО 1 данных целеуказания, навигационной информации, а также данных о комплектации подвижных объектов по назначению, идентичных данным от смежных систем корабля в соответствии с протоколами их взаимодействия с корабельной системой управления подвижными объектами;
- моделирование динамических изменений, связанных с движением объектов в реальном масштабе времени;
- оперативное управление ходом тренировки;
- планирование, учет, контроль и анализ учебного процесса;
- регистрация обучаемых;
- контроль уровня подготовленности и результатов тренировки;
- восстановление прикладного программного обеспечения на РМО 1 и РМИ 2 в случае его повреждения.
Подключение РМО 1 и РМИ 2 к сети электропитания производится через источники бесперебойного питания 13 и 24, соответственно, типа UPS со встроенными аккумуляторными батареями. Таким образом, обеспечивается возможность нормального функционирования устройств комплекса в течение не менее 5 минут при несанкционированном отключении электропитания или при выходе параметров электропитания за допустимые пределы, т.е. на время, необходимое для экстренного завершения работы и предотвращения разрушения программного обеспечения и потери данных.
Тренажерный комплекс имеет в своем составе ступенчатую программно-аппаратную систему защиты информации от несанкционированного доступа, для чего на каждом рабочем месте установлен ряд ограничений:
- ограничение доступа к операционной системе, защищенное паролями, индивидуальными для каждого рабочего места;
- ограничение доступа к программам, защищенное паролями, индивидуальными для каждого РМИ 2, а на РМО 1 - еще и индивидуальными для каждого обучаемого;
- ограничение доступа к включению/выключению и работе на РМО 1, защищенное электромеханическими замками блокировки органов управления на УВД 5 с ключами, индивидуальными для каждого рабочего места.
Тренажер имеет в своем составе ступенчатую систему восстановления программного обеспечения в случае его повреждения.
При повреждении на РМО 1 прикладных программ предусмотрена возможность их восстановления с РМИ 2, однако при условии сохранения работоспособности системного программного обеспечения (операционной системы).
Для восстановления программного обеспечения при повреждении системного программного обеспечения предусмотрена возможность восстановления программ при помощи компакт-дисков из комплекта носителей данных. На каждом компакт-диске записан образ программного обеспечения, установленного на ПЭВМ одного из рабочих мест, и имеющего соответствующие настройки в зависимости от типа рабочего места (РМИ или РМО) и номера рабочего места (РМО от 1 до n). В процессе восстановления программного обеспечения производится автоматическая идентификация оборудования ПЭВМ, поэтому компакт-диски из комплекта носителей данных можно использовать только в ПЭВМ, входящих в состав тренажера.
Таким образом, достигаемый технический результат при использовании тренажерного комплекса состоит в предотвращении несанкционированного доступа в систему, а также в аппаратной реализации моделирования нештатных ситуаций реальных систем, что обеспечивает эффективное обучение на основе многообразия задач с различной степенью сложности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2007 |
|
RU2340950C1 |
| Тренажер для подготовки операторов ПТРК с комбинированной системой наведения | 2018 |
|
RU2692024C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОГО ОБУЧЕНИЯ НАВЫКАМ ПОИСКА И ОБЛОВА РЫБЫ И МОРСКИХ БЕСПОЗВОНОЧНЫХ, ПОЛОЖИТЕЛЬНО РЕАГИРУЮЩИХ НА СВЕТ | 2009 |
|
RU2436168C2 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ ОПЕРАТОРОВ ГИДРОАКУСТИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2408079C2 |
| ТРЕНАЖЕР ДЛЯ ГРУППОВОЙ ПОДГОТОВКИ ОПЕРАТОРОВ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2009 |
|
RU2419164C2 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| КЛАСС УЧЕБНЫЙ КОМПЬЮТЕРНЫЙ ДЛЯ ТЕХНИЧЕСКОЙ ПОДГОТОВКИ ЭКИПАЖЕЙ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ И ТЕХНИКИ | 2021 |
|
RU2770897C1 |
| КОМПЛЕКСНЫЙ ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ СПЕЦИАЛИСТОВ ПОДРАЗДЕЛЕНИЙ РЕАКТИВНЫХ СИСТЕМ ЗАЛПОВОГО ОГНЯ | 2013 |
|
RU2525804C1 |
Изобретение относится к тренажеростроению, в частности корабельным тренажерам, и может быть использовано для подготовки экипажей кораблей. Тренажер содержит рабочее место инструктора и набор рабочих мест обучаемых. Системный блок ПЭВМ рабочего места инструктора связан с системными блоками ПЭВМ каждого рабочего места обучаемого через концентратор линий связи интерфейсом командного типа. Пульт управления каждого рабочего места обучаемого имеет устройство ввода данных для выполнения заданий, замок блокировки электромеханического типа для защиты от несанкционированного доступа и мониторы для отображения задания и решения, которые интерфейсом пользователя подключены к системному блоку ПЭВМ. Системный блок ПЭВМ связан с блоком коммутации электропитания и источником бесперебойного питания, что обеспечивает его работу при отключении сети с сохранением программной среды, а также реализует нештатную ситуацию на рабочем месте обучаемого по сигналу с рабочего места инструктора. Программная среда включает мультимедийный имитатор корабельной системы управления движением подвижных объектов и сопряженных с ним корабельных систем, программное обеспечение, базу данных ситуационных задач. Задания поступают на мониторы и пульты управления рабочего места обучаемого, которые выполнены в виде имитаторов пульта управления оператора корабельной системы управления подвижными объектами с двумя мониторами и устройством ввода данных. Технический результат заключается в повышении надежности работы и степени защиты от несанкционированного доступа, а также повышении достоверности имитации процессов управления реальной системы. 10 з.п. ф-лы, 1 ил.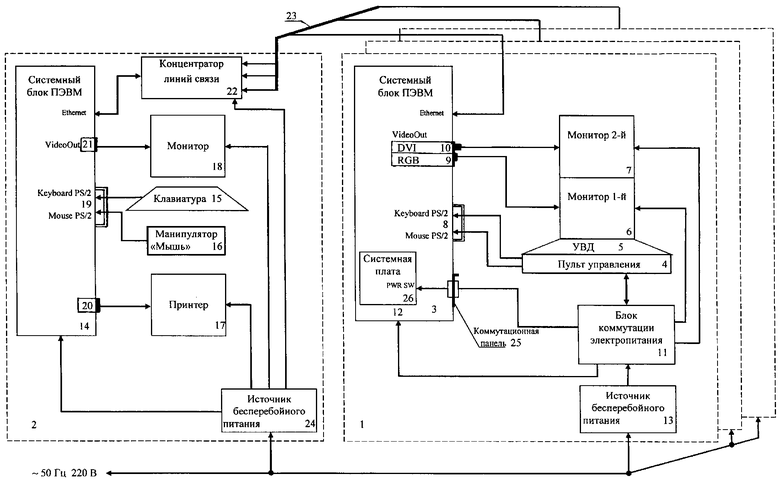
| МОРСКОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ТРЕНАЖЕР | 2003 |
|
RU2251157C2 |
| Судоводительский тренажер | 1989 |
|
SU1808136A3 |
| УНИФИЦИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ АВИАЦИОННЫЙ ТРЕНАЖЕР | 1994 |
|
RU2087037C1 |
| Устройство для оценки работы рулевого | 1985 |
|
SU1406627A1 |
| US 6361321 B1, 26.03.2002 | |||
| US 4842520 A, 27.06.1989. | |||

