Область техники
Настоящее устройство относится к машиностроению и может быть применено в качестве движителя для транспортировки газовых и жидких сред, а также для создания реактивной силы для перемещения транспортных средств, например, летательных или плавательных аппаратов.
Уровень техники
Известен винтовой лопастной движитель с высокоэффективной лопастью винта и увеличенной поверхностью рабочей части (РФ № 2 551 404, МПК B63H 1/26, F04D 29/38, B64C 11/18 опубликовано 20.05.2015). Данный винт имеет плоскую поверхность, которая проходит вдоль задней поверхности лопасти, и ширина которой составляет 1/3 от ширины лопасти, заднюю закругленную по радиусу поверхность, которая пересекает плоскую поверхность и имеет радиус R, который составляет 2/3 от ширины задней поверхности и тем самым дополняет остальную часть задней поверхности. На свободном конце радиуса задней поверхности внутренняя контактная поверхность с радиусом, равным 1.5 R, пересекает плоскость вращения винта под углом 3-9 градусов. Закругленная по радиусу поверхность выходной кромки, которая имеет радиус 0,5 R пересекает плоскость, расположенную ниже половины толщины края лопасти указанной внутренней контактной поверхности и плоской поверхности, и изогнута в направлении, противоположном внутренней контактной поверхности. Расстояние от точки пересечения указанных закругленных по радиусу поверхностей, которые имеют радиус R и 1.5 R, до плоскости, где расположена задняя плоская поверхность, составляет 1/4 и 1/5 ширины в проекции задней поверхности. Диаметр F задней поверхности лопасти заключен в диапазоне значений диаметра от R400 до R650.
Изменённая форма винта повышает эффективность движителя, однако происходит потеря эффективности за счёт придания вращательного движения среде, что является недостатком данного устройства
Также известно транспортное средство с модулями, использующими бегущую волну, патент США US20220170438A1 (Vehicle with traveling wave thrust module apparatuses, methods and systems; F03B 13/00; B62D 57/02; B60L 50/60; B64B 1/00; B63G 8/08; A63B 35/00; B60F 3/00), которое выполнено в виде гибких лент, приводов, соединённых с шарнирами на ленте, а также корпуса, источника питания и системы управления. Изгибающие ленту элементы, выполненные в виде электродвигателей, используются для последовательного приложения сил к гибким лентам для создания деформаций, а также для последовательного вращения шарниров, прикрепленных к лентам, что приводит к перемещению синусоидальных деформаций вдоль лент. Движущиеся волны синусоидальных деформаций оказывают давление на жидкость и вызывают её движение и создание тяги.
Механическое изгибание ленты с помощью приводов позволяет перемещать данное транспортное средство по твёрдым поверхностям, как, например, лёд, а также в жидких средах. Недостатками данного технического решения является неэффективная работа изгибающих ленту элементов, обусловленная потерями энергии в механизмах, изгибающих ленту, и, в следствии этого, невозможность работы в средах малой плотности.
Наиболее близким к заявленному техническому решению является волновой движитель для газовых и жидких сред с распределённым электрическим приводом, патент РФ RU2790994C1 (F02K 7/00; B63H 1/36; F17D 1/065), который состоит из гибкой ленты, принимающую синусоидальную форму, привода, корпуса, источника питания, блока управления. Гибкая лента, принимающая синусоидальную форму в виде трех полных циклов, размещена внутри корпуса, выполненного в виде прямоугольного параллелепипеда с открытыми торцами. Привод выполнен в виде взаимодействующих стационарных и подвижных проводников электрического тока, распределённых и размещённых на корпусе и на ленте соответственно, при этом, проводники расположены перпендикулярно направлению движения гребней ленты: стационарные- на поверхностях корпуса, а подвижные- на обеих поверхностях лент. Подвижные проводники имеют скобообразную пружинную форму и вложены друг в друга с выступающими на концах контактными площадками. Блок управления соединён с источником питания и контактными шинами, расположенными вдоль корпуса. Контактные шины отделены от стационарных проводников равными изолирующими разрывами с возможностью передачи электрического тока от блока управления через контактные шины на контактные площадки подвижных проводников, и через коммутирующие элементы блока управления последовательно на стационарные проводники. Малая толщина ленты обеспечивает малый занимаемый внутренний объём, а продольные колебания ленты полностью убирают реактивный момент винта и гироскопический эффект. Вредные завихрения снижаются из-за прямоугольного сечения короба. Конструкция и управления упрощаются из-за взаимодействующих стационарных и подвижных проводников.
Недостатками данного технического решения является значительные магнитные потери, вызванные рассеиванием магнитного поля вокруг прямолинейных проводников тока.
Задачей, на решение которой направлено заявляемое изобретение является, повышение эффективности работы волнового движителя.
Раскрытие изобретения
Техническим результатом является повышение эффективности работы волнового движителя путём уменьшения магнитных потерь мощности в элементах, движущих ленту.
Настоящий технический результат достигается в устройстве волновой движитель, включающем корпус в виде прямоугольного параллелепипеда с открытыми торцами, гибкую ленту волнообразной формы, расположенную внутри корпуса, проводники тока, распределённые и размещённые на корпусе, источник питания и систему управления, подающие ток в требуемый момент времени на проводники, демпфирующие элементы в виде эластичных стержней, расположенные в пазах корпуса и соединённые с концами гибкой ленты, отличающийся тем, что гибкая лента выполнена из пружинной магнитной стали или эластомера с ферромагнитными включениями, проводники тока размещены на корпусе и выполнены в виде проводящих обмоток электромагнитов с сердечниками, расположенными равномерно через равные промежутки в прямоугольных углублениях противоположных сторон корпуса, касающихся движущихся гребней гибкой ленты, сердечники электромагнитов собраны из ферромагнитного материала с высокой магнитной проницаемостью и имеют форму прямоугольных сердечников для последовательного замыкания магнитных линий, при этом поверхности электромагнитов параллельны сторонам корпуса, касающимся гребней гибкой ленты, а система управления периодически последовательно подключает и отключает электромагниты, создавая области примагничивания гребней ленты, что приводит к последовательному перемещению их вдоль корпуса в форме бегущей волны.
Отличительными признаками являются:
Гибкая лента выполнена из пружинной магнитной стали или эластомера с ферромагнитными включениями, проводники тока размещены на корпусе и выполнены в виде проводящих обмоток электромагнитов с сердечниками, расположенными равномерно через равные промежутки в прямоугольных углублениях противоположных сторон корпуса, касающихся движущихся гребней гибкой ленты, это повышает эффективность работы волнового движителя путём уменьшения магнитных потерь мощности в элементах, движущих ленту;
Сердечники электромагнитов собраны из ферромагнитного материала с высокой магнитной проницаемостью и имеют форму прямоугольных сердечников для последовательного замыкания магнитных линий, при этом поверхности электромагнитов параллельны сторонам корпуса, касающимся гребней гибкой ленты, что повышает эффективность работы волнового движителя путём уменьшения магнитных потерь мощности в элементах, движущих ленту.
Задача, решаемая в предлагаемом волновом движителе с проводниками тока, размещёнными на корпусе, выполненными в виде проводящих обмоток электромагнитов с сердечниками, расположенными равномерно через равные промежутки в углублениях корпуса по внешним сторонам, касающихся гребнями гибкой ленты, имеют низкие магнитные потери. Сердечники электромагнитов собраны из ферромагнитного материала с высокой магнитной проницаемостью и имеют форму, необходимую для оптимального замыкания магнитных линий.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналогов свидетельствует о соответствии заявленного решения критерию «новизна».
Краткое описание фигур
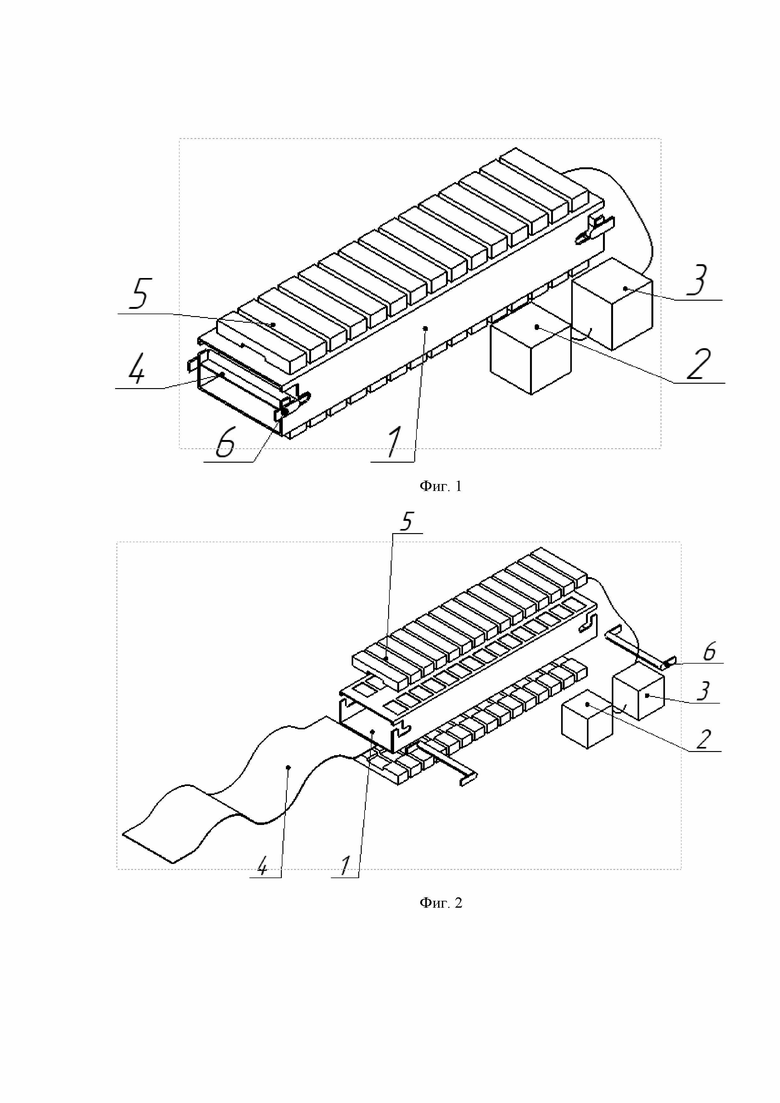
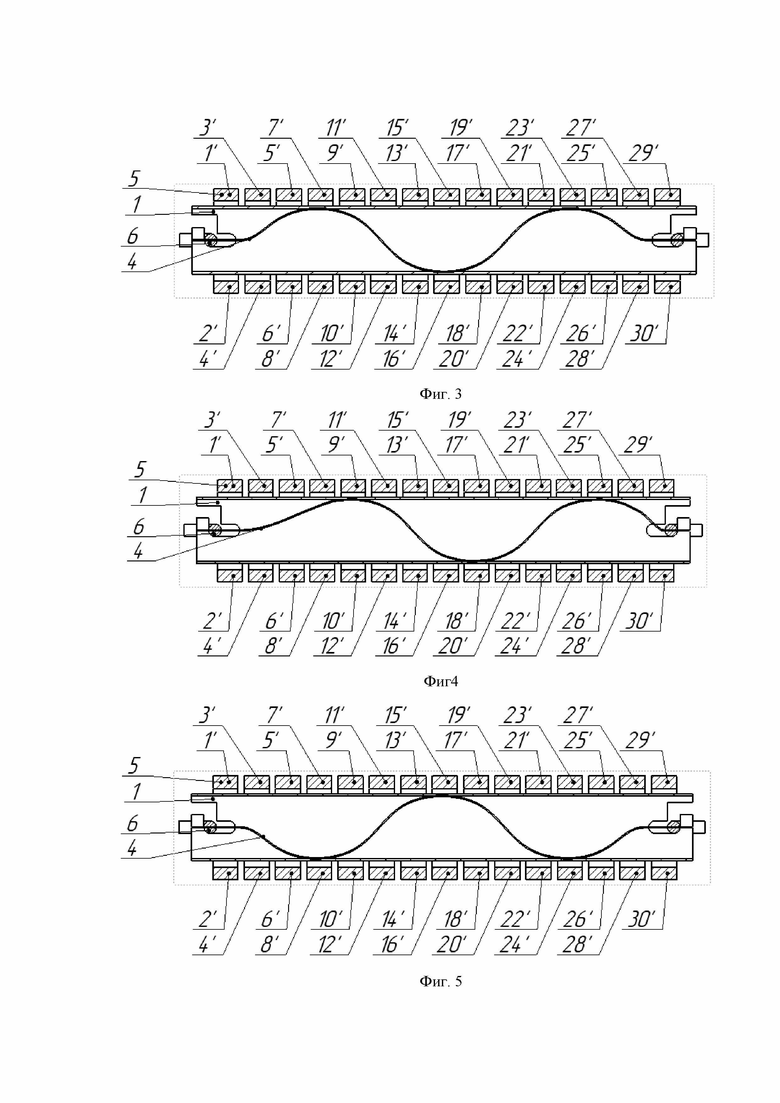
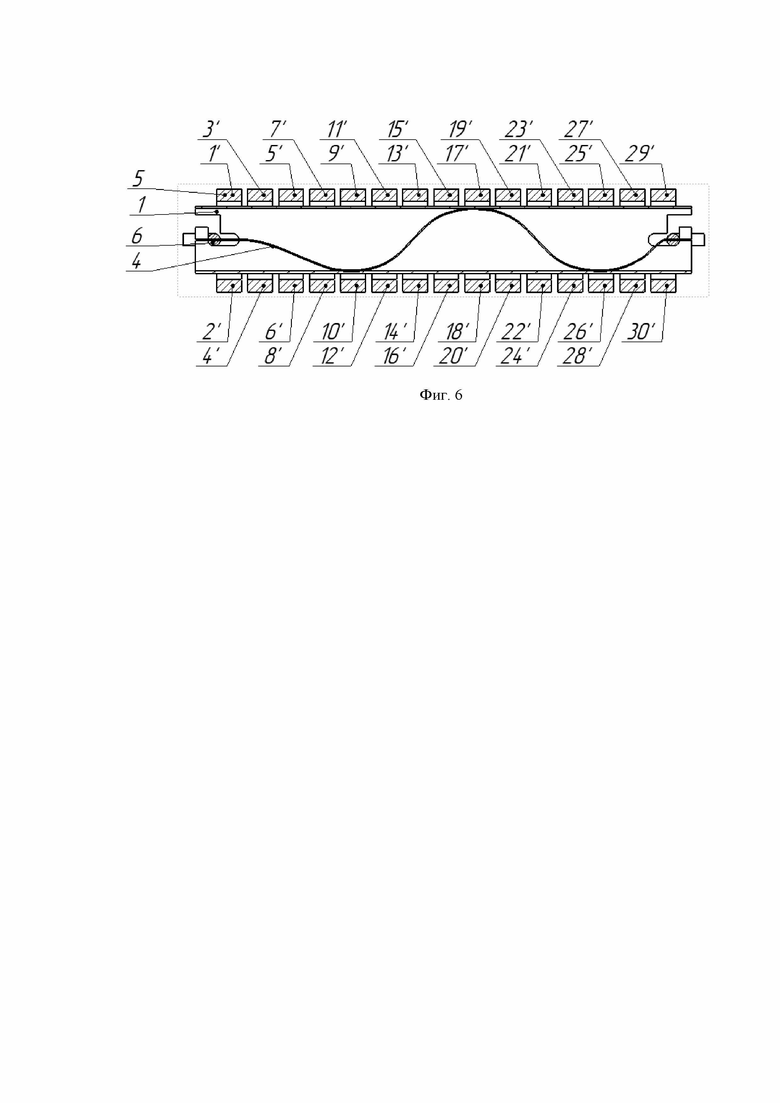
На фиг. 1 изображен изометрический вид волнового движителя в сборе; на фиг. 2 изображён изометрический вид волнового движителя в разобранном состоянии; на фиг. 3 изображен продольный разрез волнового движителя в начальный момент работы, цифрами со штрихом пронумерованы электромагниты для упрощения объяснения работы алгоритма; на фиг. 4 изображён продольный разрез волнового движителя через один такт работы, цифрами со штрихом пронумерованы электромагниты для упрощения объяснения работы алгоритма; на фиг. 5 изображён продольный разрез волнового движителя в момент прохождения половины цикла, цифрами со штрихом пронумерованы электромагниты для упрощения объяснения работы алгоритма; на фиг. 6 изображён продольный разрез волнового движителя через один такт работы, цифрами со штрихом пронумерованы электромагниты для упрощения объяснения работы алгоритма.
Предлагаемый волновой движитель состоит из корпуса 1 в виде прямоугольного параллелепипеда с открытыми торцами, источника питания 2, системы управления 3, гибкой ленты 4, расположенной внутри корпуса 1 и принимающую синусоидальную волнообразную форму, электромагнитов 5 расположенных через равные промежутки, равномерно в углублениях корпуса 1 по внешним сторонам граней касающихся гребней гибкой ленты 4, сердечники которых собраны из ферромагнитного материала с высокой магнитной проницаемостью, и имеющих форму, необходимую для оптимального замыкания магнитных линий, демпфирующих элементов 6 в виде эластичных стержней, расположенных в пазах корпуса и соединённых с концами гибкой ленты 4.
Гибкая лента 4, принимающая волнообразную форму в виде двух или больше периодов, зависящих от мощности движителя, размещена внутри корпуса 1, выполненного в виде прямоугольного параллелепипеда с открытыми торцами. Корпус 1 продольно вытянут. Два демпфирующих элемента 6 в виде эластичных стержней размещены симметрично на торцевых частях корпуса 1. Начало и конец гибкой ленты 4 закреплены на демпфирующих элементах 6, обеспечивающих безопасную работу последней. Гибкая лента 4 выполнена из гибкого упругого материала, например из пружинной магнитной стали или эластомера с ферромагнитными включениями. На корпусе, на двух противоположных продольных сторонах, соприкасающихся с гребнями гибкой ленты 4 с наружных сторон, имеются углубления для расположения в них сердечников электромагнитов 5. Углубления расположены через равные промежутки, равномерно по сторонам и имеют такие размеры и глубину, чтобы обеспечивать зазор не более 5 мм до гребня ленты 4, это позволяет снизить магнитные потери на примагничивание ленты. Ссылаясь на стр. 87 и 108 формулы 25.3 и 32.2, издания Курс физики: учеб. пособие: в 6 ч. Ч. 3: Электричество и магнетизм / И. И. Коваленко. – СПб.: ГУАП, 2020. – 143 с. ISBN 978-5-8088-1480-6, магнитное поле, возникающее при пропускании электрического тока через электромагниты, не рассеивается в пространстве, в сравнении с прямолинейными проводниками, а концентрируется магнитными сердечниками электромагнитов 5. Эффективность работы движущих изгибающую ленту 4 электромагнитов 5 выше, чем у прямолинейных проводников за счёт концентрирования магнитного поля. Следовательно, увеличивается эффективность работы волнового движителя. Источник питания 2 через систему управления 3 обеспечивает включение необходимых электромагнитов 5, расположенных вблизи гребней гибкой ленты 4 для её изгибания в новую форму, обеспечивая бегущую волну.
Пример работы волнового движителя
Допустим, лента 4 находится в положении, показанном на фиг.3. Линии контакта ленты 4 находятся около электромагнитов 7’, 16’, 23’. Для волнового рабочего движения ленты 4 в новое положение с лева на право, необходимо создать номинальный рабочий потенциал электромагнитов 5 9’, 18’, 25’, и одновременно для начала притягивания в этой области ленты 4 к ним, необходимо постепенно уменьшить рабочий потенциал электромагнитов 5 7’, 16’, 23’. После подачи электрического тока на необходимые электромагниты 5 возникает магнитная сила, притягивающая области гибкой ленты в новое положение, создающая синусоидальное волнообразное движение.
Последующая управляющая подача электрического тока на соответствующие ближайшие электромагниты 5 позволяет получить постоянное изгибание ленты в новое положение и колебания ленты 4 по форме бегущей волны.
Алгоритм работы блока управления:
1. Блок управления 3 подаёт электрический ток от источника питания 2 на электромагниты 5;
2. Блок управления 3 периодически последовательно подключает и отключает электромагниты 5, создавая области примагничивания гребней ленты последовательно перемещая их вдоль корпуса;
3. Среда, жидкая или газовая, в виде диэлектрика, расположенная между лентой 4 и корпусом 1, при перемещении гребней ленты 4, перемещается лентой 4 в направлении движении гребней, создавая силу тяги;
4. Таким образом, обеспечивается работа волнового движителя в качестве источника тяги или насоса.
Во время колебаний гибкой ленты в волновом движителе возникает сила тяги, которую предлагается применять в качестве движущей силы в таких устройствах как летательный или плавающий аппарат. При стационарном использовании волновой движитель предлагается применять как насос для жидких или газовых сред.
В результате использования предлагаемого волнового движителя, повышается эффективность работы изгибающих ленту элементов и в следствии этого эффективность работы волнового движителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой движитель для газовых и жидких сред с распределенным электрическим приводом | 2022 |
|
RU2790994C1 |
| Волновой движитель транспортного средства | 1980 |
|
SU943070A1 |
| Компрессор на основе линейного двигателя | 2022 |
|
RU2792183C1 |
| Расходомер | 1980 |
|
SU901823A1 |
| ЦИКЛОТРОННЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2578551C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИЖИТЕЛЬ | 1969 |
|
SU1839411A1 |
| ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2289186C2 |
| ТЕПЛОПЕРЕДАЮЩАЯ ПАНЕЛЬ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2763353C1 |
| МАГНИТОКУМУЛЯТИВНЫЙ ВИТКОВЫЙ ГЕНЕРАТОР БЫСТРОНАРАСТАЮЩИХ ИМПУЛЬСОВ ТОКА | 2018 |
|
RU2691626C1 |
| Способ создания электрореактивной тяги | 2016 |
|
RU2635951C1 |
Устройство относится к машиностроению и может быть применено в качестве движителя для транспортировки газовых и жидких сред, а также для создания реактивной силы для перемещения транспортных средств, например летательных или плавательных аппаратов. Волновой движитель включает корпус в виде прямоугольного параллелепипеда с открытыми торцами, гибкую ленту волнообразной формы, расположенную внутри корпуса, источник питания и систему управления, демпфирующие элементы в виде эластичных стержней, расположенные в пазах корпуса и соединённые с концами гибкой ленты. Гибкая лента выполнена из пружинной магнитной стали или эластомера с ферромагнитными включениями. На корпусе размещены проводящие обмотоки электромагнитов с сердечниками, расположенными равномерно через равные промежутки в прямоугольных углублениях противоположных сторон корпуса, касающихся движущихся гребней гибкой ленты. Сердечники электромагнитов собраны из ферромагнитного материала с высокой магнитной проницаемостью и имеют форму прямоугольных сердечников для последовательного замыкания магнитных линий. Поверхности электромагнитов параллельны сторонам корпуса, касающимся гребнями гибкой ленты. Система управления периодически последовательно подключает и отключает электромагниты, создавая области примагничивания гребней ленты, что приводит к последовательному перемещению их вдоль корпуса в форме бегущей волны. 6 ил.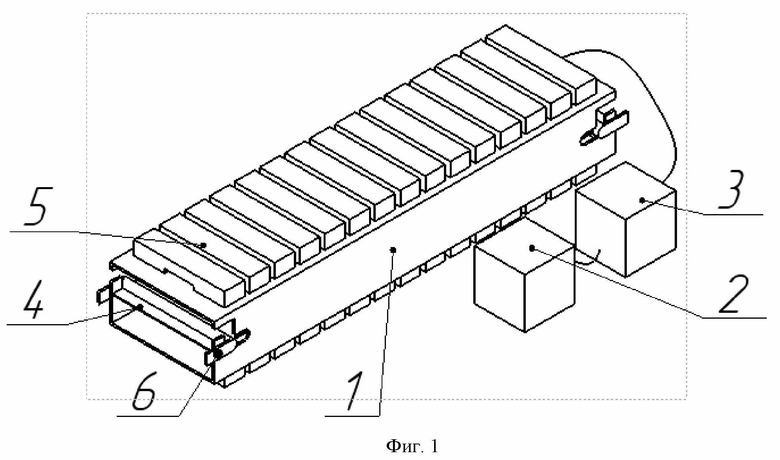
Волновой движитель, включающий корпус в виде прямоугольного параллелепипеда с открытыми торцами, гибкую ленту волнообразной формы, расположенную внутри корпуса, проводники тока распределённые и размещённые на корпусе, источник питания и систему управления, подающие ток в требуемый момент времени на проводники, демпфирующие элементы в виде эластичных стержней, расположенные в пазах корпуса и соединённые с концами гибкой ленты, отличающийся тем, что гибкая лента выполнена из пружинной магнитной стали или эластомера с ферромагнитными включениями, проводники тока размещены на корпусе и выполнены в виде проводящих обмоток электромагнитов с сердечниками, расположенными равномерно через равные промежутки в прямоугольных углублениях противоположных сторон корпуса, касающихся движущихся гребней гибкой ленты, сердечники электромагнитов собраны из ферромагнитного материала с высокой магнитной проницаемостью и имеют форму прямоугольных сердечников для последовательного замыкания магнитных линий, при этом поверхности электромагнитов параллельны сторонам корпуса, касающимся гребнями гибкой ленты, а система управления периодически последовательно подключает и отключает электромагниты, создавая области примагничивания гребней ленты, что приводит к последовательному перемещению их вдоль корпуса в форме бегущей волны.
| Волновой движитель для газовых и жидких сред с распределенным электрическим приводом | 2022 |
|
RU2790994C1 |
| Расходомер | 1980 |
|
SU901823A1 |
| Волновой ленточный конвейер | 1983 |
|
SU1139677A1 |
| WO 2021137852 A1, 08.07.2021. | |||

