Область техники
Настоящее изобретение относится к машиностроению и может быть применено в качестве движителя для транспортировки газовых и жидких сред, а также для создания реактивной силы для перемещения транспортных средств, например, летательных или плавательных аппаратов.
Уровень техники
Известен винтовой насос патент (RU 2642681 C1, МПК F04D 3/02, F04D 13/08, F04D 29/18, опубликовано 25.01.2018), который состоит из цилиндрического корпуса, внутри которого, соосно с ним, расположен вал, снабженный объемной винтовой нарезкой. Недостатками устройства являются отъём рабочего сечения трубопровода валом и потери мощности за счёт придания вращательного движения жидкости, что соответственно уменьшает объёмный расход насоса и приводит к снижению удельной тяги.
Известен винтовой лопастной движитель с высокоэффективной лопастью винта с увеличенной поверхностью рабочей части (RU 2 551404, МПК B63H 1/26, F04D 29/38, B64C 11/18 опубликовано 20.05.2015). Недостатками устройства являются потери мощности за счёт придания вращательного движения газам, образование вредных завихрений, создающихся на концах лопастей, возникновение реактивного момента винта, гироскопический эффект, что приводит к снижению удельной тяги.
Известен также роторный движитель (US 4048947 A, B63H 13/00, опубликован 20.09.1977) приводящий в движение текучие среды, такие как вода или воздух для создания вращательного движения состоящий из цилиндрического или усечённо-конического ротора, имеющего вертикальную ось, состоящую из множества одинаковых лопастей, распределенных по периферии ротора, каждая из которых имеет симметричный аэродинамический профиль и смонтирована таким образом, чтобы свободно вращаться вокруг оси, которая в значительной степени вертикальна и параллельна передней кромке ротора. Каждая лопасть, предпочтительно имеющая диаметрально противоположную, установлена на конце крепления, имеющим тупой угол наклона, со связью данной лопасти. Недостатками изобретения являются сложность механической конструкции, вызванная необходимостью задания индивидуального поворота лопастей в процессе вращения всего ротора, вредные завихрения, создающиеся лопастями, гироскопический эффект, что приводит к снижению удельной тяги.
Наиболее близким к заявленному техническому решению, является движитель для жидких сред, принятый за прототип, использующий бегущую волну, который может использоваться как насос и источник тяги (travelingwavepropeller, pumpandgeneratorapparatuses, methodsandsystems US 2019/0055917 A1, F03B17/06, H02K7/18, опубл. 01.21.2019), который выполнен в виде гибких лент, приводов, соединённых с шарнирами на ленте, а также корпуса и блока управления. Приводы используются для последовательного приложения сил к гибким лентам для создания деформаций, а также для последовательного вращения шарниров, прикрепленных к лентам, что приводит к перемещению синусоидальных деформаций вдоль лент. Движущиеся волны синусоидальных деформаций оказывают давление на жидкость и вызывают её движение и создание тяги. Недостатками изобретения являются сложность механической конструкции, которая обусловлена необходимостью индивидуального поворота рычагов и приводов, и потери мощности из-за придания вращательного движения жидкости и сопротивления движению обтекающего потока элементами привода.
Задачей, на решение которой направлено заявляемое изобретение является увеличение производительности движителя, снижение потерь мощности и упрощение конструкции.
Раскрытие изобретения
Технический результат изобретения достигается за счет замены механического привода электрическим с распределенными проводниками, и гибким элементом, непосредственно взаимодействующим с жидкой или газообразной средой, являющимся гибкой лентой, совершающей поперечные волнообразные движения внутри прямоугольного корпуса постоянного сечения с отсутствующими торцевыми гранями, причём, концы ленты закреплены на боковых гранях корпуса.
Предлагаемый движитель состоит из гибкой ленты, принимающую синусоидальную форму, привода, корпуса, источника питания, блока управления. Гибкая лента, принимающая синусоидальную форму в виде трех полных циклов, размещена внутри корпуса, прямоугольного параллелепипеда с открытыми торцами, приводом представлена группа взаимодействующих стационарных и подвижных проводников электрического тока распределённых и размещённых на корпусе и на ленте соответственно, при этом, проводники расположены перпендикулярно направлению движения гребней ленты, стационарные на поверхностях корпуса, а подвижные на обеих поверхностях ленты, при этом подвижные проводники имеют скобообразную пружинную форму и вложены друг в друга с выступающими на концах контактными площадками, а блок управления соединён с источником питания и контактными шинами, расположенными вдоль корпуса и отделены от стационарных проводников равными изолирующими разрывами, при этом с возможностью передачи электрического тока от блока управления через контактные шины на контактные площадки подвижных проводников, и через коммутирующие элементы блока управления последовательно на стационарные проводники. Тонкая лента уменьшает занимаемый внутренний объём и полностью убирает реактивный момент винта и гироскопический эффект. Короб прямоугольного сечения уменьшает вредные завихрения. Взаимодействующие стационарные и подвижные проводники упрощают конструкцию и управление.
Отличительными признаками являются
По сравнению с прототипом и аналогами, предлагаемый волновой движитель:
- не имеет сложной механической конструкции;
- упрощается управление за счёт перехода от механического привода к электрическому;
- уменьшаются потери мощности за счёт снижения турбулентности потока жидкости и снижения гидродинамического сопротивления жидкости элементами движителя.
Краткое описание рисунка
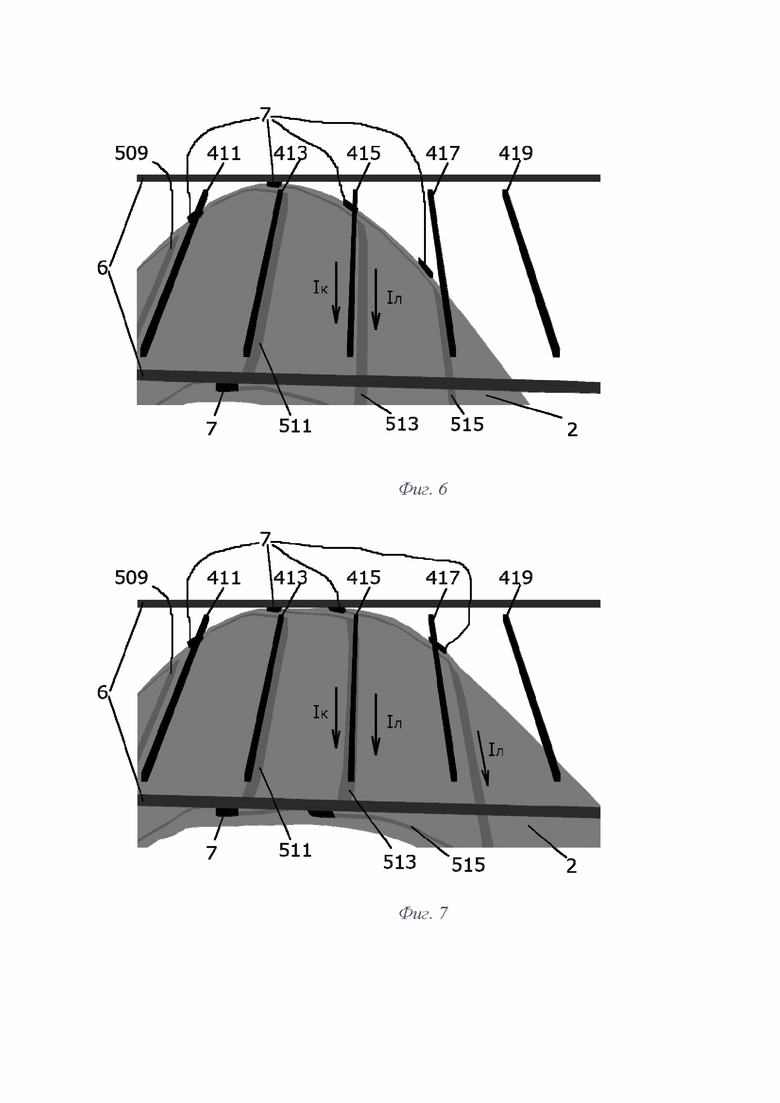
Сущность изобретения поясняется чертежом, где на фиг.1 изображен изометрический вид движителя, который представляет собой предмет изобретения, на фиг.2 - двумерный вид ленты сверху, показывающий расположение подвижных проводников на ленте, на фиг.3 - двумерный вид сверху одного из подвижных проводников, на фиг.4 –разрез ленты, показывающий расположение на ней подвижных проводников, на фиг.5 - двумерное изображение движителя в продольном разрезе, на фиг.6 - вид, отображающий контакт подвижного проводника с контактной шиной, и протекание токов по подвижным и стационарным проводникам, на фиг.7 - вид, отображающий взаимодействие подвижного проводника с контактными шинами и стационарными проводниками, притяжение их из-за возникновения силы Ампера, на фиг.8 - вид, отображающий перекатывание ленты по корпусу, и возникновение тока на новом подвижном проводнике.
Осуществление изобретения
Предлагаемое устройство состоит из корпуса (1), выполненного из гибкого листового материала, например, ленты (2), оси (3), группы стационарных проводников (4), группы подвижных проводников (5), контактных шин (6), контактных площадок (7), источника питания (8), блока управления (9), пазов (10), пружины (11).
Корпус представляет собой прямоугольный параллелепипед с открытыми торцами (фиг. 1). В пазах внутренних поверхностей корпуса (1) размещена группа стационарных проводников (4) с заданным шагом согласно фиг.1. Две оси (3) размещены симметрично на торцевых частях корпуса (1), первая из осей размещена в пазах (10) и закреплена на пружинах (11) согласно фиг. 1, вторая ось закреплена с возможностью вращения. Контактные шины (6) расположены на внутренних поверхностях вдоль корпуса (1) согласно фиг.1. Стационарные проводники (4) имеют, по крайней мере, один разрыв, изолирующий их от контактных шин (6).
Лента (2) выполнена из гибкого упругого материала, например, из пружинной стали. Концы ленты (2) закреплены на осях (3) с защемлением, позволяя ленте изгибаться внутри корпуса и вращаться её концам относительно точек крепления осей (3). Длина ленты больше длины корпуса, и в закреплённом состоянии образует, как минимум, два гребня (см. фиг.5). Ширина ленты (2) позволяет ей свободно перемещаться внутри корпуса (1) с минимальным зазором. Подвижные проводники (5) размещены на обеих поверхностях ленты (2), имеют скобообразную форму (см. фиг. 2, фиг. 4), прямоугольное сечение для усиления магнитных взаимодействий и имеют на концах контактные площадки (7). Шаг подвижных проводников (5) ленты (2) равен шагу стационарных проводников (4). Контактные площадки (7) подвижных проводников (5) находятся на концах проводников согласно (фиг. 3). Расстояние между контактными площадками (5) на каждом подвижном проводнике ленты (2) равно расстоянию между контактными шинами (6) на корпусе. Контактные площадки (7) представляют собой утолщения на концах подвижных проводников (5), обращенные в одну сторону от ленты, согласно фиг. 4. Подвижные (5) и стационарные (4) проводники, контактные площадки (7) и контактные шины (6) выполнены из материала с высокой электрической проводимостью, например, из электротехнической. Подвижные (5) и стационарные (4) проводники покрыты эластичным электроизоляционным материалом, например, резиной. Группа стационарных проводников (4) и контактные шины (6) электрически соединены с блоком управления (9).
Движитель работает следующим образом:
Ссылаясь на стр. 223 формула 51.2 Сивухин Д. В. Общий курс физики. - Изд. 4-е, стереотипное. - М.: Физматлит; Изд-во МФТИ, 2004. - Т. III. Электричество. - 656 с. - ISBN 5-9221-0227-3; ISBN 5-89155-086-5. Сила Ампера между двумя прямыми проводниками пропорционально произведению токов этих проводников, и обратно, пропорционально расстоянию между ними. Для воздуха, при силе тока в двух проводниках равным 160 А и расстоянию между ними 0,5 мм сила Ампера будет равна 2,1 Н, что достаточно для изгиба ленты на заданное расстояние. При расстоянии между проводниками равным 5 мм сила ампера будет равна 0,2 Н, при ещё большем увеличении расстояния между последующими проводниками, магнитное взаимодействие будет стремиться к 0. Поэтому в изгибе ленты принимают участие только те проводники, которые располагаются непосредственно около линий контакта ленты и корпуса.
Допустим, лента находится в положении, показанном на фиг.5. Линии контакта ленты находятся около стационарных проводников 413, 438. Для того чтобы изогнуть ленту в новое положение, необходимо чтобы начали притягиваться области ленты, расположенные около стационарных проводников 415, 440, которые будут находиться на расстоянии, достаточном для магнитного притяжения ленты. Остальные стационарные проводники в случае подачи на них тока не смогут оказать достаточное притяжение.
Чтобы притягивались области около стационарных проводников 415, 440 необходимо, чтобы на ленте около них были расположены подвижные проводники с током. В случае если подвижные проводники будут иметь форму прямых линий, расположенных поперёк полотна ленты, не представляется возможным организовать подачу тока на них простым способом. Для того чтобы на такие проводники подавался ток, необходимо чтобы проводники имели трапециевидную форму без нижнего основания, были вставлены друг в друга и имели контактные площадки. Подача тока от контактных шин через контактные площадки на подвижные проводники будет осуществляться на вынесенные за линию контакта ленты с корпусом участки. Лента будет разделена на участки, которые будут поочерёдно подключаться один за другим по ходу поперечного колебания ленты. Расстояние между контактными площадками (5) на каждом подвижном проводнике ленты (2) равно расстоянию между контактными шинами (6) на корпусе. Боковые участки подвижных проводников не мешают магнитному взаимодействию, т.к. они являются перпендикулярными по отношению к стационарным проводникам.
В описываемом положении ленты, в области, лежащей на линии касания ленты и корпуса, образуется контакт между контактными шинами и контактными площадками описываемых ближайших проводников. В результате контакта по подвижным проводникам начинает бежать электрический ток. Последующая подача электрического тока на соответствующие ближайшие стационарные проводники создаёт силу Ампера, достаточную для изгиба ленты в новое положение. Участки ленты притягиваются к корпусу из-за соединения с подвижными проводниками, на которые влияет сила Ампера. Изгиб происходит путём прижима участков ленты между линией касания с корпусом и подвижным проводником с током до корпуса.
Участки ленты изгибаются в новое положение, т.е. до следующих по порядку стационарных проводников, придавая общему очертанию ленты новую форму. Взаимодействуя последовательно с каждым из стационарных проводников за своё колебание, лента приходит в своё последнее положение цикла, после которого статичные состояния лента может принимать только после «отпружинивания», в результате которого расположение гребней ленты становится зеркальным первоначальному состоянию, относительно продольной линии. В новом первоначальном положении контактные площадки первых для начала цикла подвижных проводников соединяются с контактными шинами. Цикл повторяется.
Алгоритм работы блока управления:
1. Блок управления (9) подаёт постоянный электрический ток от источника питания (8) на контактные шины (6).
2. Блок управления (9) периодически подключает и отключает стационарные проводники (4) к шинам (6) в заданной временной последовательности, время подключения проводников меньше времени их критического нагрева и составляет около 5…50 мс.
3. При подключении стационарных проводников (4) к шинам (6), через стационарные проводники (4) протекает электрический ток.
4. Контактные площадки (7) проводников, находящихся на гребнях ленты, касаются контактных шин (6), по этим проводникам протекают токи от контактных шин (6).
5. Токи по стационарным и подвижным проводникам протекают в одну сторону. Из-за силы Ампера, действующей на проводники с током, и из-за однонаправленности токов в проводниках, стационарные и подвижные проводники, по которым протекают токи, притягиваются друг другу, изгибая ленту в новое положение.
6. Участок ленты, на котором расположен подвижный проводник с действующей на него силой Ампера, изгибает ленту (2) в новое положение. В новом положении происходит замыкание новых подвижных проводников ленты. Изменение положения гребней ленты происходит до тех пор, пока участки ленты от первой оси до первой точки касания и от последней точки касания до второй оси не приобретут критическую кривизну. При достижении критической кривизны боковых участков, лента меняет своё устойчивое состояние на зеркальное, относительно продольной оси. В новом состоянии движение гребней происходит по такому же принципу.
7. Среда, жидкая или газовая, расположенная между лентой (2) и корпусом (1), при перемещении гребней ленты (2), перемещается лентой (2) в направлении движении гребней.
8. Таким образом, обеспечивается работа движителя в качестве источника тяги или насоса.
Пример цикла работы предлагаемого устройства:
1. Допустим, лента (2) находится в положении, указанном на фиг. 6. В этом положении, гребни ленты (1) находятся вблизи некоторых проводников корпуса (1), допустим, проводников 413, 438 (см. фиг. 7).
2. Контактные площадки (7) проводников 513, 538 ленты касаются контактных шин (6). По соответствующим подвижным проводникам ленты течёт ток Iл. (фиг. 7).
3. Блок управления (7) подключает проводники 415, 440 корпуса к контактным шинам, при этом по проводникам 415, 440 протекают токи Iк за время коммутации (фиг. 8).
4. Подвижные проводники 513, 538 притягиваются к стационарным проводникам 415, 440 за счёт силы Ампера и магнитных сил, изгибая ленту в новое положение. В новом положении происходит замыкание новых проводников ленты, допустим 515, 540 (фиг. 9).
5. Лента из-за своей упругости отгибается от корпуса в местах замыкания предыдущих стационарных проводников (413, 438), тем самым разрывая соединение контактных шин (6) и контактных площадок (7). Блок управления (7) отключает проводники 415, 440 корпуса от контактных шин (фиг. 8).
6. Далее цикл повторяется со следующими по порядку стационарными проводниками, т.е. 415, 440.
7. Цикл повторяется до достижения критической кривизны боковых участков ленты (2) и смены устойчивого состояния на зеркальное относительно продольной оси. Блок управления (7) подключает ближайшие к ленте (2) стационарные проводники (4) к контактным шинам (6), чтобы примагнитить к ним участки ленты (2) и создать контакт между контактными площадками (7) подвижных проводников (5) и контактными шинами (6).
8. По крайним подвижным проводникам (5) начинает бежать электрический ток.
9. Цикл повторяется сначала со следующими стационарными проводниками (5).
Движитель изготавливается следующим образом. Две половины корпуса, представляющие собой продольный разрез, отливаются пластмассы, например из Smooth-Cast 310. После застывания заготовки достаются из форм и поступают на зачистку дефектов литья. На гибкой ленте, выполненной из пружинной стали 50ХСА толщиной 0,01 гальваническим способом, наносятся проводники из меди, после чего покрываются изоляционным материалом- резиной. После, в пазы устанавливаются стационарные проводники, контактные шины, выполненные из электротехнической меди М1Е диаметром 2,44 мм. Затем две половины сплавляются вместе, устанавливается гибкая лента. При параметрах корпуса L=0,4 м, D=0,1 м, H=0,01 м (где L, D, H - соответственно длина, высота и ширина корпуса) массе движителя без груза – 2 кг, сила тяги равна 10,5 кг при частоте колебаний ленты 300 Гц и описывается формулой: Fтяги=0.175*ρсреды L2DH vколебаний2, (ρсреды - плотность среды [кг/м3], vколебаний – частота колебаний ленты [Гц]). Удельная тяга равна Fуд=105:2=52,5 Н/кг. В результате, развиваемая удельная сила тяги волнового движителя для газовых и жидких сред с распределенным электрическим приводом выше, чем у прототипа.
Из примера применения видно, что предлагаемый движитель не требует специальных материалов, может быть изготовлен с помощью известных технических средств и обеспечивает технический результат. Следовательно, он обладает промышленной применимостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой движитель | 2024 |
|
RU2839091C1 |
| ИНТЕГРАЛЬНАЯ СИСТЕМА ДАТЧИКОВ | 2010 |
|
RU2532575C2 |
| ЕМКОСТНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2573447C2 |
| ЕМКОСТНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА С ДИФФЕРЕНЦИАЛЬНЫМИ ПАРАМИ | 2010 |
|
RU2559993C2 |
| Подшипниковый узел (варианты) | 2013 |
|
RU2677435C2 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| ВЫСОКОСКОРОСТНАЯ ТУРБИНА | 2012 |
|
RU2608386C2 |
| Пьезоэлектрический резервный источник питания (варианты) | 2019 |
|
RU2719538C1 |
| МОДУЛЬНАЯ ПЕРЕДАЮЩАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА И РАЗВОРАЧИВАЕМЫЙ ИЗЛУЧАТЕЛЬ (ВАРИАНТЫ) | 2013 |
|
RU2557447C1 |



Изобретение относится к машиностроению и может быть применено в качестве движителя для транспортировки газовых и жидких сред, а также для создания реактивной силы для перемещения транспортных средств. Волновой движитель для газовых и жидких сред с распределенным электрическим приводом включает в себя гибкую ленту, принимающую синусоидальную форму, привод, корпус, источник питания и блок управления. Гибкая лента, принимающая синусоидальную форму в виде трех полных циклов, размещена внутри корпуса, прямоугольного параллелепипеда с открытыми торцами, приводом представлена группа взаимодействующих стационарных и подвижных проводников электрического тока, распределённых и размещённых на корпусе и на ленте соответственно. Проводники расположены перпендикулярно направлению движения гребней ленты, стационарные на поверхностях корпуса, а подвижные на обеих поверхностях ленты. Подвижные проводники имеют скобообразную форму и вложены друг в друга с выступающими на концах контактными площадками, а блок управления соединён с источником питания и контактными шинами, расположенными вдоль корпуса и отделенными от стационарных проводников равными изолирующими разрывами, при этом с возможностью передачи электрического тока от блока управления через контактные шины на контактные площадки подвижных проводников, и через коммутирующие элементы блока управления последовательно на стационарные проводники. Достигается увеличение производительности движителя, снижение потерь мощности и упрощение конструкции. 8 ил.
Волновой движитель для газовых и жидких сред с распределенным электрическим приводом, включающий гибкую ленту, принимающую синусоидальную форму, привод, корпус, источник питания, блок управления, отличающийся тем, что гибкая лента, принимающая синусоидальную форму в виде трех полных циклов, размещена внутри корпуса, прямоугольного параллелепипеда с открытыми торцами, приводом представлена группа стационарных и подвижных проводников электрического тока, распределённых и размещённых на корпусе и на ленте соответственно, при этом проводники расположены перпендикулярно направлению движения гребней ленты, стационарные на поверхностях корпуса, а подвижные на обеих поверхностях ленты, при этом подвижные проводники имеют скобообразную форму и вложены друг в друга с выступающими на концах контактными площадками, а блок управления соединён с источником питания и контактными шинами, расположенными вдоль корпуса и отделенными от стационарных проводников равными изолирующими разрывами, при этом с возможностью передачи электрического тока от блока управления через контактные шины на контактные площадки подвижных проводников, и через коммутирующие элементы блока управления последовательно на стационарные проводники.
| US 20190055917 A1, 21.02.2019 | |||
| WO 2021137852 A1, 08.07.2021 | |||
| СУДОВОЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2009958C1 |
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1999 |
|
RU2152332C1 |

