Данная заявка была подана в патентное бюро Китая 30 сентября 2022 г., номер заявки 20221 1216918.0, приоритет принадлежит китайскому патенту под наименованием изобретения «Способ управления переключением передач, система управления переключением передач и двухмоторное транспортное средство», всё содержание которого включено в настоящую заявку посредством ссылки.
Область техники
Настоящая заявка относится к области управления транспортным средством, в частности, к способу управления переключением передач, системе управления переключением передач и двухмоторному транспортному средству.
Предпосылки изобретения
Гибридный автомобиль, оснащенные новыми электромеханическими устройствами связи, могут выбирать режимы работы в зависимости от рабочих условий для достижения высокой эффективности и экономии топлива. Новые электромеханические устройства связи часто выпускаются в нескольких режимах работы, таких как, чисто электрический, последовательный гибрид или распределение мощности, параллельный гибрид и т. д. Однако в процессе переключения режима автомобиль может вдруг двигаться вперед, трястись, двигаться не плавно и т. д., что приводит к ухудшению впечатления от вождения пользователя. Поэтому управление плавностью при переключении режимов является одной из ключевых технологий гибридных автомобилей.
Обычная коробка передач с двойным сцеплением (DualClutch Gearbox, DCT) или многоскоростные электромеханические системы связи часто используют стратегию переключения передач от сцепления к сцеплению(Clutch-To-Clutch). Стратегия переключения передач заключается в том, чтобы добиться переключения передач путем отпускания сцепляющего механизма перед переключением скорости и включения сцепляющего механизма после переключения скорости. Следовательно, вышеупомянутая стратегия переключения часто требует большой мгновенной мощности трения единицы скольжения и рабочей мощности трения скольжения сцепления, что приводит к увеличению затрат на сцепление и гидравлическую систему, а также к слишком сложному программному обеспечению управления.
Суть изобретения
В связи с этим, необходимо разработать способ управления переключением передач, систему управления переключением передач и двухмоторное транспортное средство, что предназначено для решения следующих технических проблем предшествующего уровня техники, таких как недостаточная плавность переключения режимов и сложность эксплуатации.
Способ управления переключением передач, применяемый к двухмоторному транспортному средству; Упомянутое двухмоторное транспортное средство включает в себя двигатель, первый мотор, второй мотор, тормоз, сцепление и колеса транспортного средства, и упомянутый способ управления переключением передач включает в себя:
При получении сигнала переключения назначенного переключения передач, упомянутое двухмоторное транспортное средство переключается с крутящего момента на колёсах обеспечиваемым упомянутым двигателем через входной вал на крутящий момент на колёсах обеспечиваемым упомянутым вторым мотором.
Упомянутое двухмоторное транспортное средство управляет сочетанием между упомянутым тормозом и солнечной шестерней.
Упомянутое двухмоторное транспортное средство использует упомянутый первый мотор для регулирования скорости вращения упомянутого двигателя (1) до целевой скорости вращения двигателя, соответствующей целевой передаче.
Упомянутое двухмоторное транспортное средство управляют упомянутым сцеплением во включенном состоянии.
Упомянутое двухмоторное транспортное средство переключается с крутящего момента на колёсах обеспечиваемым упомянутым вторым мотором на крутящий момент на колёсах обеспечиваемым упомянутым двигателем через упомянутый входной вал.
Система управления переключением передач, включает память и процессор. Упомянутый процессор реализует вышеупомянутый способ управления переключением передач при выполнении кода компьютерной программы, хранящегося в памяти.
Двухмоторное транспортное средство включает память и процессор. Упомянутый процессор реализует вышеупомянутый способ управления переключением передач при выполнении кода компьютерной программы, хранящегося в памяти.
Упомянутый способ управления переключением передач, система управления переключением передач и двухмоторное транспортное средство использует второй мотор для поддержания крутящего момента, необходимого на концах колес транспортного средства во время переключения передач, после завершения переключения двигатель используется для обеспечения крутящего момента, необходимого для колес транспортного средства, чтобы обеспечивало плавный переход крутящего момента на колёсах и хорошую плавность. В то же время это уменьшает требования к производительности тормозов, сцеплений и других элементов в процессе переключения передач и может увеличить срок годности тормозов, сцеплений и других элементов. В то же время это снижает уровень сложности во время процесса переключения передач двухмоторных транспортных средств.
Описание прилагаемых графических материалов
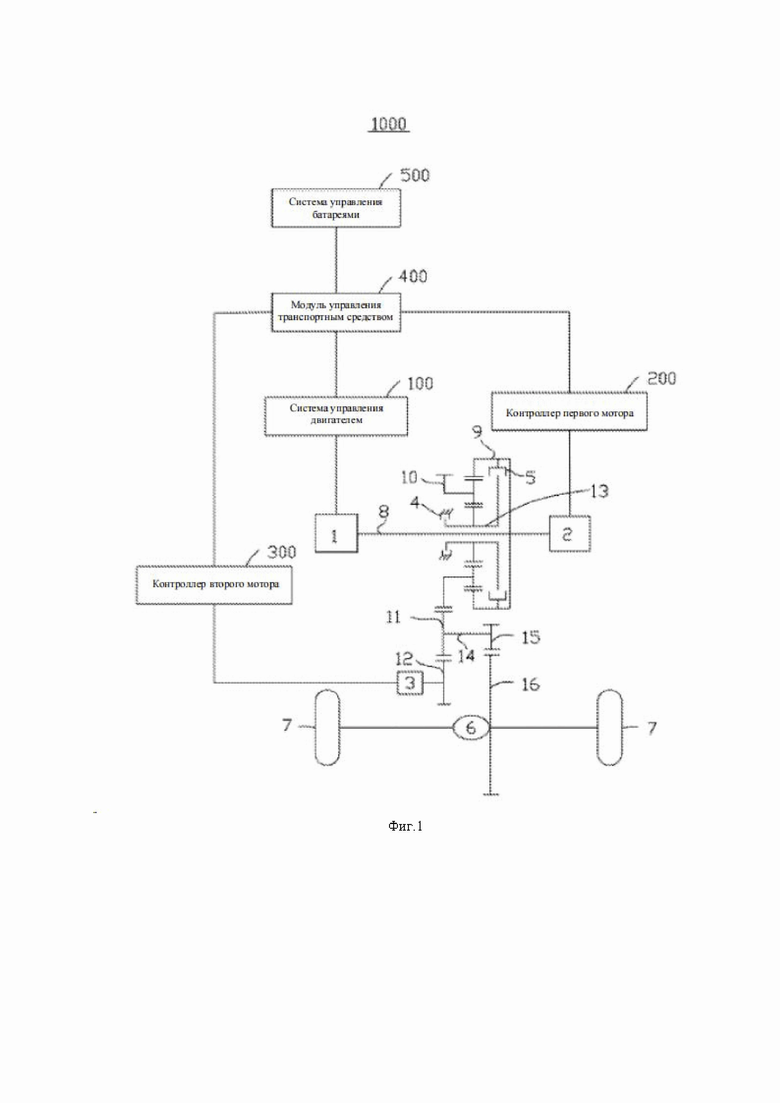
Фиг. 1 представляет собой конструктивную схему двухмоторного транспортного средства согласно предпочтительному примеру осуществления настоящей заявки.
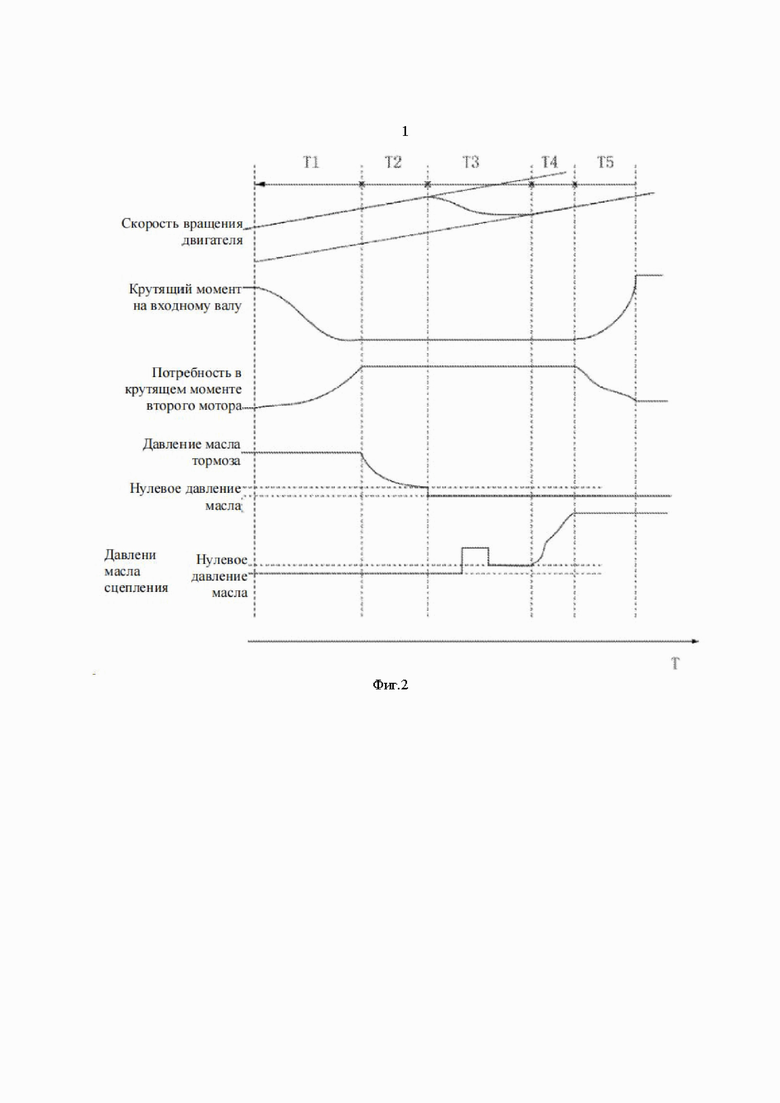
Фиг. 2 представляет собой схему формы волны скорости вращения двигателя, крутящего момента на входному валу, крутящего момента второго мотора, заданного давления масла и давления масла сцепления, когда двухмоторное транспортное средство на фиг. 1 переключается с первой передачи параллельного гибрида на второй передачи параллельного гибрида.
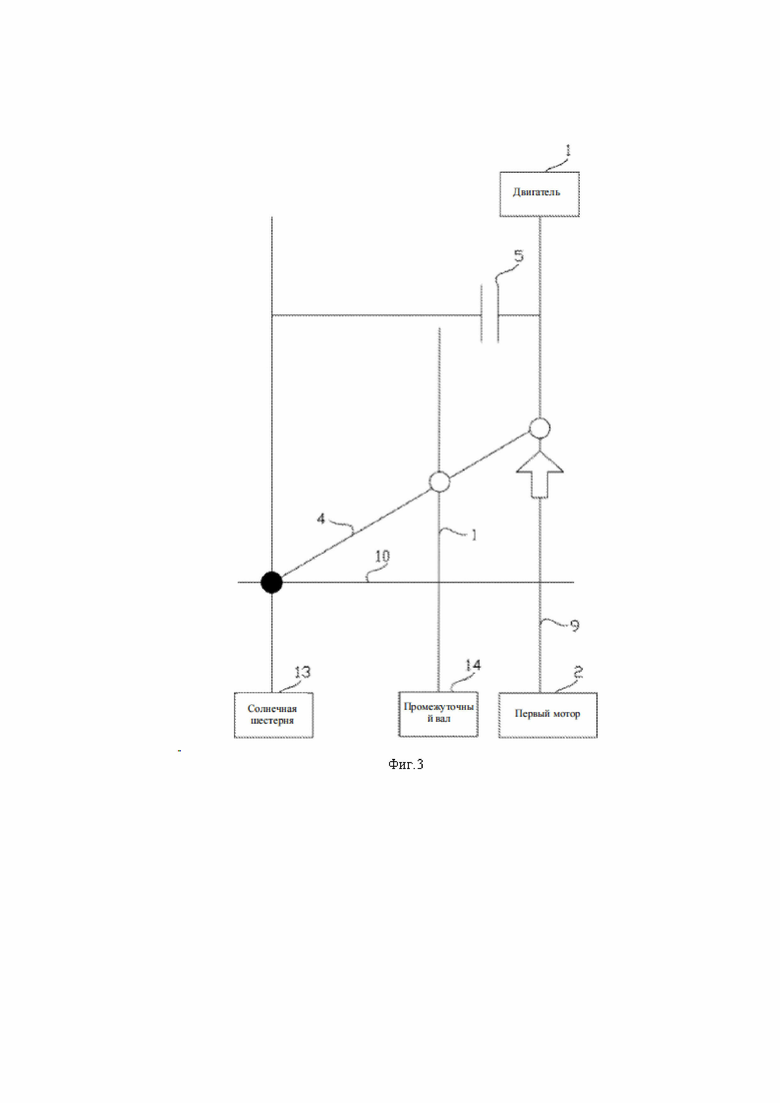
На фиг.3 представлена схема рычага двухмоторного транспортного средства перед первым этапом.
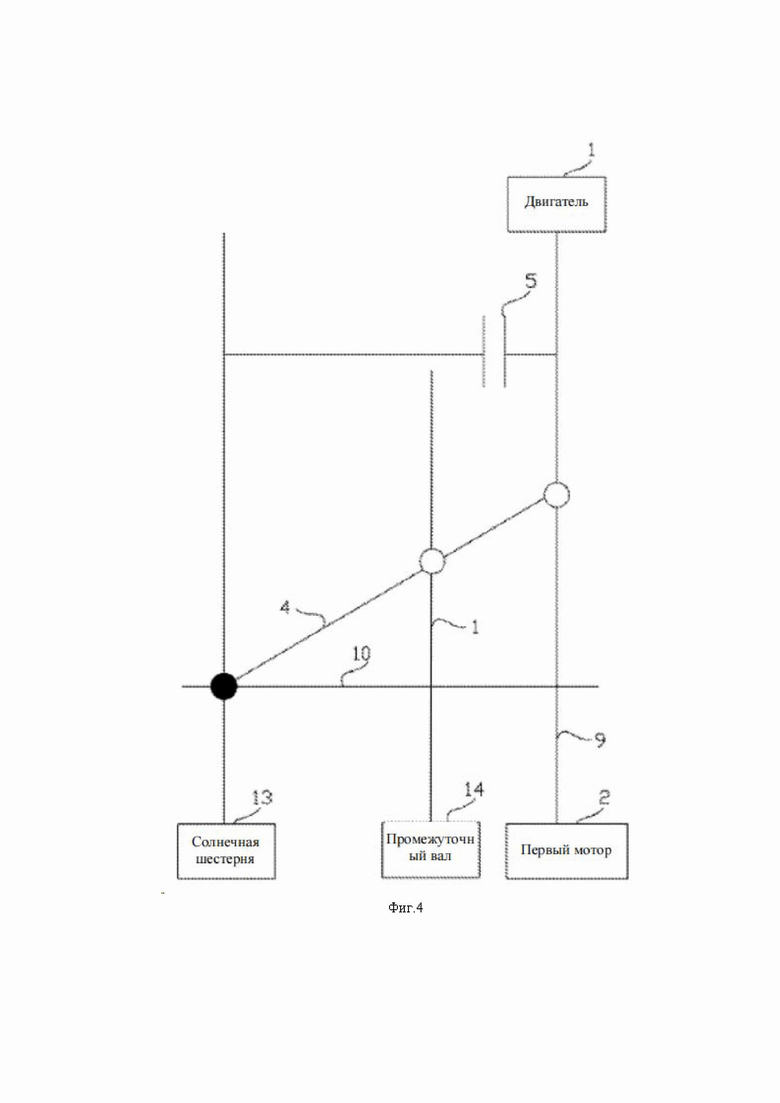
На фиг.4 представлена схема рычага двухмоторного транспортного средства в конце первого этапа.
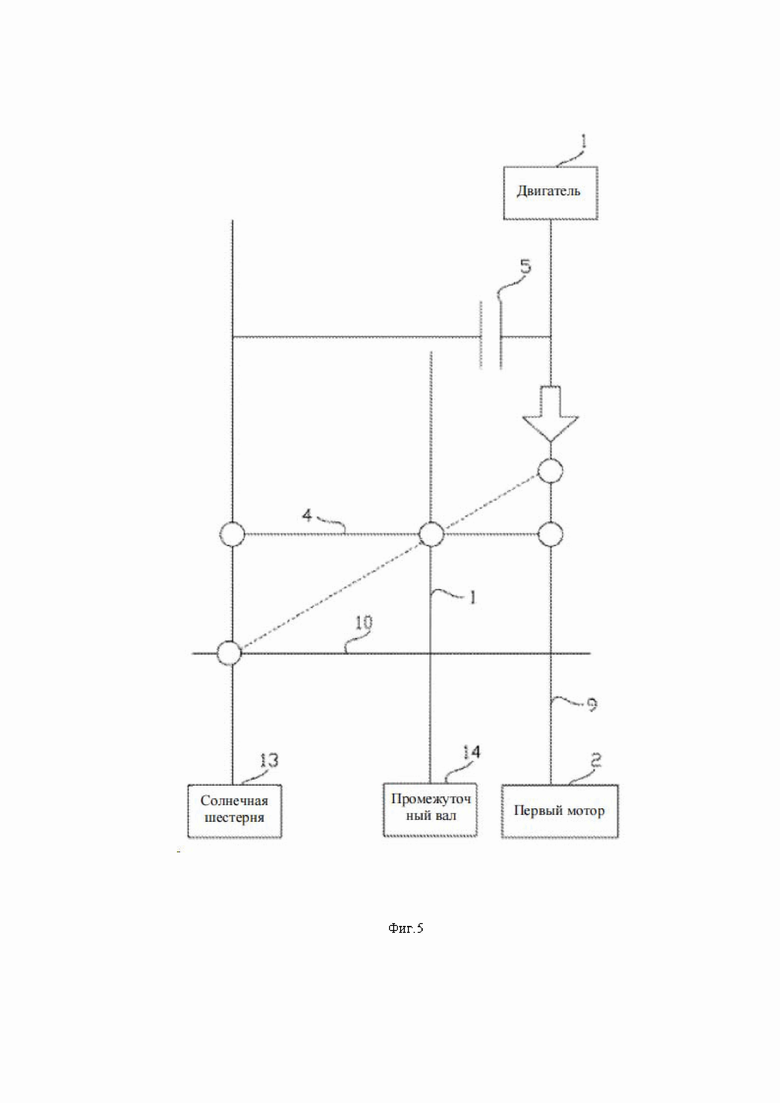
На фиг.5 представлена схема рычага двухмоторного транспортного средства третьего этапа.
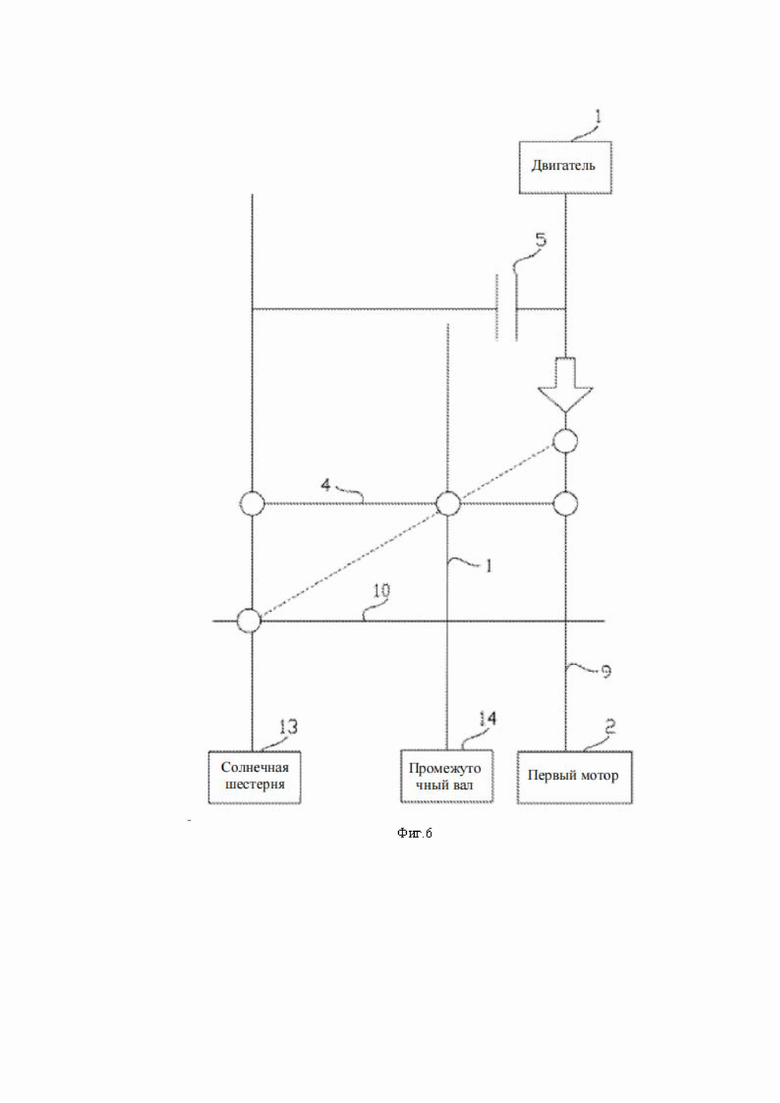
На фиг.6 представлена схема рычага двухмоторного транспортного средства пятого этапа.
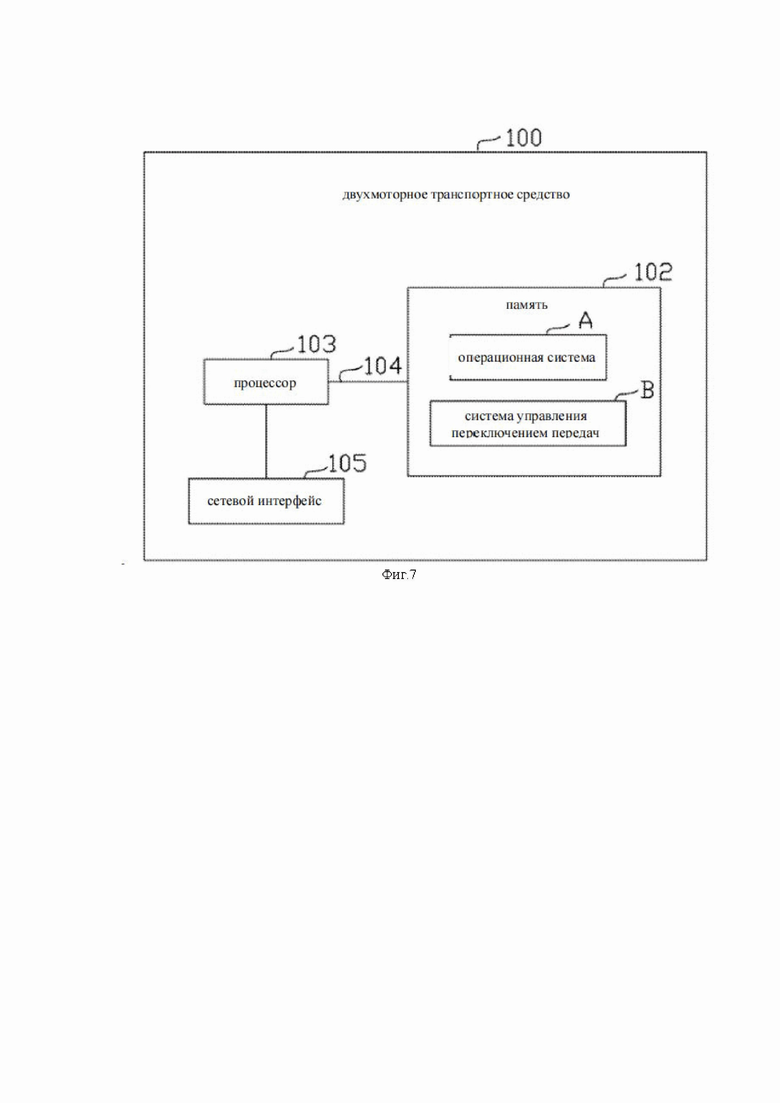
Фиг.7 представляет собой модульную схему операционной среды двухмоторного транспортного средства согласно предпочтительному примеру осуществления настоящей заявки.
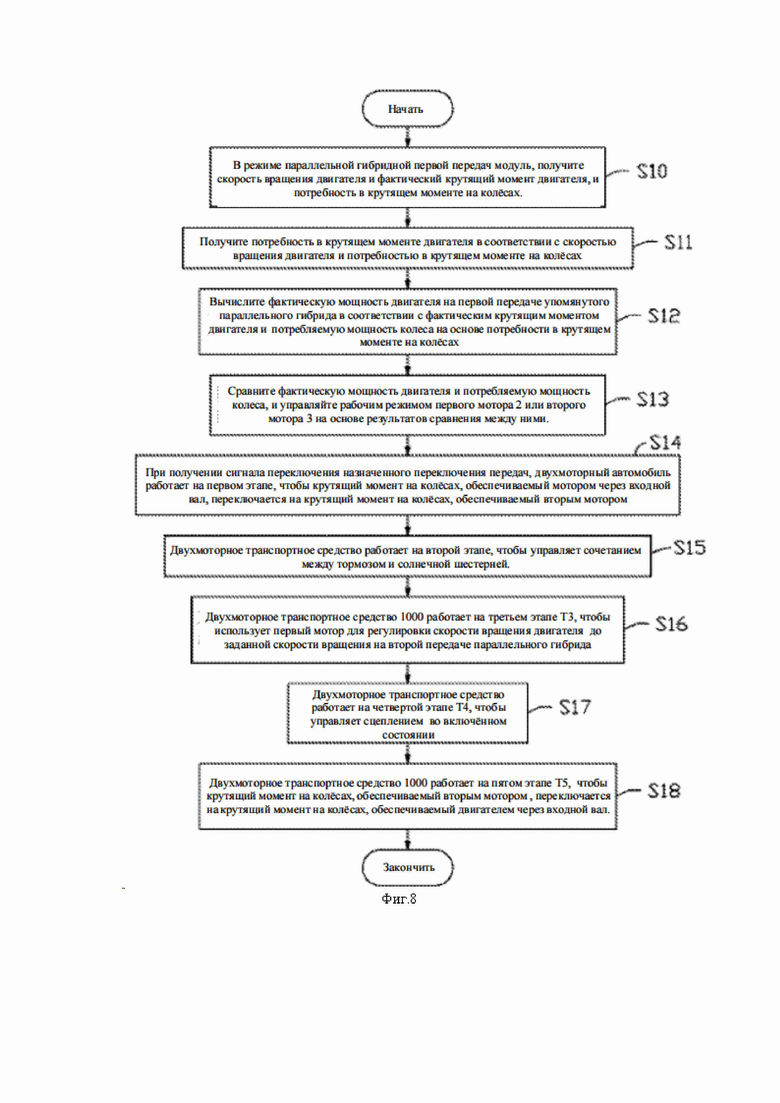
Фиг.8 представляет собой схема процесса способа управления переключением передач согласно предпочтительному варианту осуществления настоящей заявки.
Фиг.9 представляет собой схему процесса детализации этапа S16 на Фиг.8.
Конкретные способы осуществления
Чтобы специалисты в технической области могли лучше понять проект в этой заявке, технические решения в примерах осуществления настоящей заявки будут ясно и полностью описаны ниже, с учетом прилагаемых фигур в примерах осуществления настоящей заявки. Очевидно, что описанные примеры осуществления являются лишь частью примеров осуществления настоящей заявки, а не всеми. На основании примеров осуществления в этой заявке, все другие примеры осуществления, полученные специалистами в данной области техники без созидательного труда, подпадают под сферу охраны в этой настоящей заявке.
В описании примеров осуществления настоящей заявки следует отметить, что, если иное четко не предусмотрено и не ограничено, термин «соединение» следует понимать в широком смысле. Например, это может быть неподвижное соединение, разъемное соединение или интегральное соединение;
это может быть механическое соединение, электрическое соединение или взаимная связь; это может быть прямое соединение или косвенное соединение через промежуточное соединение, это может быть внутреннее соединение двух элементов или отношение взаимодействия между двумя элементами. Для специалистов в данной области техники конкретные значения вышеуказанных терминов в данной заявке могут быть поняты в зависимости от конкретной ситуации.
Термины «первый», «второй» и «третий» в инструкции по эксплуатации настоящей заявки и прилагаемых фигур используются для различения разных объектов, а не для описания заданной последовательности. Более того, термин «включает» и любые его варианты предназначены для обозначения неисключительного включения.
Если не определено иное, все технические и научные термины, используемые в этой заявке, имеют то же значение, которое обычно понимается специалистом в области техники данной заявки. Термины, используемая в инструкции по эксплуатации настоящей заявки, предназначена только для описания конкретных примеров реализации и не предназначена для ограничения заявки.
Ниже в сочетании с прилагаемыми фигурами будет описана систем управления переключением передач, способ управления переключением передач двухмоторного транспортного средства и способ выполнения транспортного средства.
См. фиг. 1, которая представляет собой конструктивную схему двухмоторного транспортного средства 1000 согласно примеру осуществления настоящей заявки. Двухмоторное транспортное средство 1000 включает в себя двигатель 1, первый мотор 2, второй мотор 3, тормоз 4, сцепление 5, дифференциал 6 и колеса транспортного средства 7.
Двигатель 1 используется для обеспечения движущей силы. Двигатель 1 соединен с первым мотором 2 и соединен со вторым мотором 3 через входной вал 8, планетарный венец шестерни 9, водило планетарной передачи 10, первую шестерню 11 и вторую шестерню 12. Тормоз 4 соединен с солнечной шестерней 13. При этом солнечная шестерня 13 и водило планетарной передачи 10 входят в зацепление, а водило планетарной передачи 10 и планетарный венец шестерни 9 входят в зацепление. При этом солнечная шестерня 13 и водило планетарной передачи 10 входят в зацепление, а водило планетарной передачи 10 и планетарный венец шестерни 9 входят в зацепление. Сцепление 5 соединено с планетарным венцом шестерни 9. Тормоз 4 взаимодействует со сцеплением 5 для переключения передач двигателя 1. Далее, первая шестерня 11 соединена с дифференциалом 6 и двумя колесами 7 транспортного средства через промежуточный вал 14, третью шестерню 15 и четвертую шестерню 16.
Когда тормоз 4 включен, движущая сила двигателя 1 передается на водило планетарной передачи 10 через планетарный венец шестерни 9, на промежуточный вал 14 через первую передачу 11 и далее на дифференциал 6 и колеса 7 транспортного средства через третью передачу 15 и четвертую передачу 16. В это время, движущую силу обеспечивает двигатель 1, который находится на первой передаче параллельного гибрида. В то же время, первый мотор 2 и второй мотор 3 могут обеспечивать движущую силу.
Когда сцепление 5 включено, солнечная шестерня 13, водило планетарной передачи 10 и планетарный венец шестерни 9 вращаются синхронно в целом, а вырабатываемая движущая сила передается на промежуточный вал 14 через водило планетарной передачи 10 и первую шестерню 11 и далее передается через третью передачу 15 и четвертую передачу 16 на дифференциал 6 и колеса 7 транспортного средства. В это время, двигатель 1 обеспечивает движущую силу, и двигатель 1 переключается на вторую передачу параллельного гибрида. В то же время, первый мотор 2 и второй мотор 3 могут обеспечивать движущую силу.
Двухмоторное транспортное средство 1000 имеет четыре режима: чисто электрический режим, режим последовательного гибрида, режим параллельной гибридной первой передачи и режим параллельной гибридной второй передачи. Среди них, двухмоторное транспортное средство 1000 активно переключается между вышеупомянутыми режимами в соответствии с такими параметрами, как дроссельная заслонка, скорость транспортного средства и уровень заряда аккумуляторной батареи(state of charge, SOC ).
Двухмоторное транспортное средство 1000 также включает в систему управления двигателем 100 (Engine management system), контроллер первого мотора (Power control unit, PCU) 200, второй контроллер мотора 300, модуль управления транспортным средством (блок управления Vehicle control unit, VCU) 400. и систему управления батареями (Battery management system) 500.
Система управления двигателем 100 электрически соединена с двигателем 1. Система управления двигателем 100 считывает такие параметры, как скорость вращения двигателя и фактический крутящий момент двигателя, когда двигатель 1 работает.
Контроллер первого мотора 200 электрически соединен с первым мотором 2. Контроллер первого мотора 200 используется для вывода крутящего момента первого мотора на первый мотора 2, чтобы управлять вращением первого мотора 2.
Второй контроллер мотора 300 электрически соединен с вторым мотором 3. Второй контроллер мотора 300 используется для вывода крутящего момента первого электродвигателя на первый мотор 2, чтобы управлять вращением второго мотора 3.
Модуль управления транспортным средством 400 и система управления двигателем 100, контроллер первого мотора 200, второй контроллер мотора 300 и система управления батареями 500 электрически соединены. Модуль управления транспортным средством 400 связывается с системой управления двигателем 100, чтобы получить множество параметров двигателя 1 и получить потребность в крутящем моменте на колёсах 7 транспортного средства. По меньшей мере, в одном примере осуществления настоящей заявки, параметрами двигателя являются скоростью вращения двигателя и фактический крутящий момент двигателя. Модуль управления транспортным средством 400 вычисляет фактическую мощность двигателя на основе параметров двигателя и потребности в крутящем моменте на колёсах, и вычисляет потребляемую мощность колеса на основе скорости, радиуса шины и потребности в крутящем моменте на колёсах двухмоторного транспортного средства 1000. Модуль управления транспортным средством 400 сравнивает потребляемую мощность двигателя и колеса и выводит параметры первого мотора на контроллер первого мотора 200 в соответствии с результатами сравнения, чтобы регулировать работу первого мотора 2. Модуль управления транспортным средством 400 выводит параметры второго мотора на второй контроллер мотора 300, чтобы регулировать работу второго мотора 3. По меньшей мере, в одном примере осуществления настоящей заявки первый параметр мотора представляет собой первое передаточное число электродвигателя, а параметр второй мотора представляет собой передаточное число второго мотора.
Например, в режиме параллельной гибридной первой передач модуль, модуль управления транспортным средством 400 получает скорость вращения двигателя и фактический крутящий момент двигателя 1 через систему управления двигателем 100 и получает потребность в крутящем моменте на колёсах. По меньшей мере, в одном варианте осуществления настоящей заявки потребность в крутящем моменте на колёсах получается на основе справочной таблицы сигналов педали акселератора, сигналов скорости транспортного средства.
В соответствии с требованиями к частоте вращения двигателя и потребностью в крутящем моменте на колёсахс, которые получается из следующей таблицы 1, модуль управления транспортным средством 400 получает потребность в крутящем моменте на колёсах и отправляет её в систему управления двигателем 100.
Таблица 1. - это таблица отношения между скоростью вращения двигателя, потребностью в крутящем моменте на колёсах и потребностью в крутящем моменте двигателя.
Таблица 1 может использоваться для настройки исходной таблицы с помощью исчерпывающего метода или динамических правил, основанных на рабочих условий, а также для оптимизации содержимого исходной таблицы на основе реальных автомобилей.
Модуль управления транспортным средством 400 дополнительно вычисляет фактическую мощность двигателя и потребляемую мощность колеса и управляет рабочим режимом первого мотора 2 или второго мотора 3 на основе результатов сравнения между ними. Когда потребляемая мощность колеса больше или равна фактической мощности двигателя, модуль управления транспортным средством 400 управляет вторым мотором 3 для обеспечения вспомогательной мощности через второй контроллер мотора 300, чтобы удовлетворить потребляемой мощности колеса. Когда потребляемая мощность колеса меньше фактической мощности двигателя, модуль управления транспортным средством 400 управляет первым электродвигателем 2 для выработки электроэнергии через первый контроллер мотора 200 и подачи электроэнергии на другие элементы двухмоторного транспортного средства 1000, например, компрессор кондиционера двухмоторного транспортного средства 1000, колонки, интерфейсы зарядки, и т. д., в этой заявке не ограничиваются.
Фактическую мощность двигателя можно вычислять по следующей формуле 1.
 Формула 1
Формула 1
Среди них,  - фактическая мощность двигателя;
- фактическая мощность двигателя;  - скорость вращения двигателя;
- скорость вращения двигателя;  - фактический крутящий момент двигателя; V - скорость двухмоторного транспортного средства 1000; r - радиус шины двухмоторного транспортного средства 1000.
- фактический крутящий момент двигателя; V - скорость двухмоторного транспортного средства 1000; r - радиус шины двухмоторного транспортного средства 1000.
Потребляемую мощность колеса можно вычислять по следующей формуле 2.
 Формула 2
Формула 2
Среди них,  - потребляемая мощность колеса транспортного средства;
- потребляемая мощность колеса транспортного средства;  - потребность в крутящем моменте на колёсах ; V - скорость двухмоторного транспортного средства 1000; r - радиус шины двухмоторного транспортного средства 1000.
- потребность в крутящем моменте на колёсах ; V - скорость двухмоторного транспортного средства 1000; r - радиус шины двухмоторного транспортного средства 1000.
Модуль управления транспортным средством 400 дополнительно вычисляет потребность в крутящем моменте первого мотора и второго мотора и отправляет ее в контроллер первого мотора 200 и второй контроллер мотора 300.
Потребность в крутящем моменте первого мотора можно вычислять по следующей формуле 3.
 Формула 3
Формула 3
Среди них,  - потребность в крутящем моменте второго мотора; - потребность в крутящем моменте на колёса транспортного средства;
- потребность в крутящем моменте второго мотора; - потребность в крутящем моменте на колёса транспортного средства;  - передаточное число от двигателя 1 к колесам в режиме параллельной гибридной первой передач; - фактический крутящий момент двигателя; -
- передаточное число от двигателя 1 к колесам в режиме параллельной гибридной первой передач; - фактический крутящий момент двигателя; - - передаточное число от первого мотора 2 к двигателю 1 в режиме параллельной гибридной первой передач.
- передаточное число от первого мотора 2 к двигателю 1 в режиме параллельной гибридной первой передач.
Потребность в крутящем моменте второго мотора можно вычислять по следующей формуле 4
 Формула 4
Формула 4
Среди них,  - потребность в крутящем моменте второго мотора; - потребность в крутящем моменте на колёсах транспортного средства; - фактический крутящий момент двигателя; - передаточное число от двигателя 1 к колесам транспортного средства 7 в режиме параллельной гибридной первой передач;
- потребность в крутящем моменте второго мотора; - потребность в крутящем моменте на колёсах транспортного средства; - фактический крутящий момент двигателя; - передаточное число от двигателя 1 к колесам транспортного средства 7 в режиме параллельной гибридной первой передач;  - передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной первой передачи.
- передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной первой передачи.
Далее, при получении сигнала переключения назначенной передачи, модуль управления транспортным средством 400 переключает крутящий момент на колёсах обеспечиваемым двигателем 1 через входной вал 8 на крутящий момент на колёсах обеспечиваемым вторым мотором 3, и использует первый мотор 2 для регулировки скорости вращения двигателя 1 до заданной скорости вращения на второй передаче параллельного гибрида, затем крутящий момент на колёсах обеспечиваемым вторым мотором 3 переключается на крутящий момент на колёсах обеспечиваемым двигателем 1 через входной вал 8, так что крутящий момент колеса транспортного средства 7 плавно переходит во время процесса переключения. По меньшей мере, в одном примере осуществления настоящей заявки, сигнал переключения назначенной передачи дает команду двухмоторному транспортному средству 1000, чтобы он переключится с первой передачи параллельного гибрида на вторую передачу параллельного гибрида.
Во время процесса переключения передач, Модуль управления транспортным средством 400 последовательно работает на первом этапе Т1, втором этапе Т2, третьем этапе Т3, четвертом этапе Т4 и пятом этапе Т5.
На фиг. 2 и 3 вместе - схема формы волны скорости вращения двигателя, крутящего момента на входному валу, крутящего момента второго электродвигателя, заданного давления масла и давления масла сцепления, когда двухмоторное транспортное средство на фиг. 1 переключается с первой передачи параллельного гибрида на второй передачи параллельного гибрида. На фиг.3 представлена схема рычага двухмоторного транспортного средства 1000 перед первым этапом 1. На первом этапе Т1 (этап обмена крутящим моментом), модуль управления транспортным средством 400 переводит тормоз 4 в включённое состояние, а сцепление 5 в выключенное состояние. Модуль управления транспортным средством 400 переключается с крутящего момента колеса обеспечиваемым двигателем 1 через входной вал 8 на крутящий момент колеса обеспечиваемым вторым мотором 3. В частности, модуль управления транспортным средством 400 управляет крутящим моментом на входном валу так, чтобы он уменьшался ступенчато первой длиной шага каждое заданное время, и управляет крутящим моментом второго мотора, чтобы он повышался ступенчато первой длиной шага каждое заданное время, и чтобы поддерживать крутящий момент на колёсах 7 транспортного средства неизменным. По меньшей мере, в одном примере осуществления настоящей заявки заданное время составляет 10 миллисекунд (мс).
Режим изменения крутящего момента на входному валу можно вычислять по следующей формуле 5.
 Формула 5
Формула 5
Среди них, - крутящий момент на входному валу;
- крутящий момент на входному валу;  - значение крутящего момента на входному валу в предыдущий момент;
- значение крутящего момента на входному валу в предыдущий момент;  - длина первого шага; - передаточное число от двигателя 1 к колесам транспортного средства 7 в режиме параллельной гибридной первой передач;
- длина первого шага; - передаточное число от двигателя 1 к колесам транспортного средства 7 в режиме параллельной гибридной первой передач;
Режим изменения крутящего момента второго мотора можно вычислять по следующей формуле 6.
 Формула 6
Формула 6
Среди них,  - крутящий момент второго мотора;
- крутящий момент второго мотора;  - значение крутящего момента второго электродвигателя в предыдущий момент; - длина первого шага; - передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной первой передачи, - потребность в крутящем моменте на колёсах.
- значение крутящего момента второго электродвигателя в предыдущий момент; - длина первого шага; - передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной первой передачи, - потребность в крутящем моменте на колёсах.
После того, что завершается обмена крутящим моментом, крутящий момент на входном валу, передаваемый двигателем 1 на входном валу 8, равен 0, крутящий момент на колесах транспортного средства 7 обеспечивается вторым крутящим моментом 2 второго мотора второго мотора 3. Далее, потребность в крутящем моменте первого мотора можно вычислять по следующей формуле 7.
 Формула 7
Формула 7
Среди них,  - крутящий момент первого мотора; - крутящий момент на входном валу; - фактический крутящий момент двигателя; - передаточное число от первого мотора 2 к двигателю 1 в режиме параллельной гибридной первой передач.
- крутящий момент первого мотора; - крутящий момент на входном валу; - фактический крутящий момент двигателя; - передаточное число от первого мотора 2 к двигателю 1 в режиме параллельной гибридной первой передач.
На фиг. 4 представлена схема рычага двухмоторного транспортного средства 1000 в конце первого этапа T1. Как видно из фиг. 4, двигатель 1 перестает подать движущую силу через входной вал 8.
На втором этапе Т2, модуль управления транспортным средством 400 управляет соединением тормоза 4 и солнечной шестерни 13. По меньшей мере, в одном примере осуществления настоящей заявки, модуль управления транспортным средством 400 контролирует давление масла в тормозе, которое должно быть снижено до точки полумуфты(Kiss point, KP), чтобы тормоз 4 соединился с солнечной шестерней 13.
На фиг. 5 представлена схема рычага двухмоторного транспортного средства 1000 на третьем этапе Т3. На третьем этапе Т3 (этап синхронизации скорости вращения) модуль управления транспортным средством 400 управляет двухмоторным транспортным средством 1000, чтобы оно работало в режиме последовательного гибрида. В это время и тормоз 4 и сцепление 5 находятся в выключенном состоянии. В режиме последовательного гибрида, модуль управления транспортным средством 400 использует первый мотор 2 для регулировки скорости вращения двигателя 1 до заданной скорости вращения на второй передаче параллельного гибрида. В текущем режиме последовательного гибрида, потребность в мощности двигателя включает в себя потребность в мощности второго мотора и других элементов. То есть часть мощности двигателя передается второму мотору 3, а другая часть - другим аксессуарам.
В частности, модуль управления транспортным средством 400 вычисляет целевую скорость вращения двигателя и потребность в мощности двигателя на основе крутящего момента второго мотора, полученного на первом этапе T1. Среди них, целевой скоростью является скоростью вращения двигателя после переключения передач. То есть, скорость вращения двигателя на второй передаче параллельного гибрида.
Поскольку второй мотор 3 подает движущую силу на колеса транспортного средства 7 в конце первом этапе Т1, модуль управления транспортным средством 400 может рассчитать потребность в крутящем моменте второго мотора в соответствии с потребностью в крутящем моменте на колёсах и отправить ее во второй контроллер мотора 300.
Далее, потребность в крутящем моменте второго мотора можно вычислять по следующей формуле 8.
 Формула 8
Формула 8
Среди них, - потребность в крутящем моменте второго мотора; - потребность в крутящем моменте на колёсах транспортного средства,  - передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи.
- передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи.
Модуль управления транспортным средством 400 дополнительно вычисляет потребность в мощности двигателя. Поэтому, потребность в мощности двигателя можно вычислять по следующей формуле 9.
 Формуле 9
Формуле 9
Среди них,  - потребность в мощности двигателя;
- потребность в мощности двигателя;  в мощности второго мотора;
в мощности второго мотора;  - потребность в мощности других элементов;
- потребность в мощности других элементов;  - скорость вращения второго мотора; - крутящий момент второго мотора;
- скорость вращения второго мотора; - крутящий момент второго мотора;  - эффективность системы второго мотора, - коэффициентом полезного действия (КПД) механической мощности двигателя в электрическую. Целавау скорость вращения двигателя можно вычислять по следующей формуле 10.
- эффективность системы второго мотора, - коэффициентом полезного действия (КПД) механической мощности двигателя в электрическую. Целавау скорость вращения двигателя можно вычислять по следующей формуле 10.
 Формула 10
Формула 10
Среди них,  - целевая скорость вращения двигателя;
- целевая скорость вращения двигателя;  - передаточное число от двигателя 1 к колесам в режиме параллельной гибридной второй передачи, V- скорость двухмоторного транспортного средства 1000, r - радиус шины двухмоторного транспортного средства 1000.
- передаточное число от двигателя 1 к колесам в режиме параллельной гибридной второй передачи, V- скорость двухмоторного транспортного средства 1000, r - радиус шины двухмоторного транспортного средства 1000.
Модуль управления транспортным средством 400 вычисляет потребность в крутящем моменте двигателя на основе целевой скорости вращения двигателя и потребность в мощности двигателя и отправляет ее в систему управления двигателем 100 . Потребностью в крутящем моменте двигателя можно вычислять по следующей формуле 11.
 Формула 11
Формула 11
Среди них,  - потребность в крутящем моменте двигателя; - потребность в мощность двигателя; - максимальный крутящий момент при настоящей скорости вращения двигателя;
- потребность в крутящем моменте двигателя; - потребность в мощность двигателя; - максимальный крутящий момент при настоящей скорости вращения двигателя;  - целевая скорость вращения двигателя.
- целевая скорость вращения двигателя.
Модуль управления транспортным средством 400 вычисляет разницу скоростей между целевой скоростью двигателя и текущей фактически скоростью двигателя и в соответствии с разницей скоростей вычисляет потребность в крутящем моменте первого мотора на основе алгоритма пропорционально-интегрирующего управления. Потребность в крутящем моменте первого мотора можно вычислять по следующей формуле 12.
 Формула 12
Формула 12
Среди них, - крутящий момент первого мотора;  - значение крутящего момента первого мотора в предыдущий момент;
- значение крутящего момента первого мотора в предыдущий момент;  - значение P пропорционально - интегрального регулятора;
- значение P пропорционально - интегрального регулятора;  - разница скоростей;
- разница скоростей;  - значение I пропорционально-интегрального регулятора, и также это скалярная величина.
- значение I пропорционально-интегрального регулятора, и также это скалярная величина.
По меньшей мере, в одном примере осуществления настоящей заявки, потребность в крутящем моменте первого мотора используется в качестве потребности в крутящем моменте обратной связи, которая вместе с потребностью в крутящем моменте второго мотора приводит к регулированию скорости вращения двигателя до целевой.
На четвертом этапе Т4, модуль управления транспортным средством 400 управляет сцеплением 5 во включенном состоянии. Когда обнаруживается, что разница скоростей между двумя концами сцепления 5 находится в пределах 50 об/мин (revolutions per minute, rpm), модуль управления транспортным средством 400 управляет сцеплением 5 для повышения давления масла (как показано на фиг. 4), чтобы сцепление 5 было во включенном состоянии.
На фиг. 6 представлена схема рычага двухмоторного транспортного средства 1000 на пятом этапе Т5. На первом этапе Т5 (этап обмена крутящим моментом), модуль управления транспортным средством 400 переводит тормоз 4 в выключенное состояние, а сцепление 5 во включенное состояние. На этом этапе, модуль управления транспортным средством 400 обменивает крутящий момент на колёсах, обеспечиваемый крутящим моментом второго мотора, на крутящий момент на колёсах, обеспечиваемый крутящим моментом двигателя. В соответствии с требованиями к скорости вращения двигателя на второй передаче параллельного гибрида и потребностью в крутящем моменте на колёсахс, которые получается из следующей таблицы 1, модуль управления транспортным средством 400 снова получает потребность в крутящем моменте на колёсах и отправляет её в систему управления двигателем 100. Далее, когда потребляемая мощность колеса больше или равна фактической мощности двигателя, модуль управления транспортным средством 400 управляет вторым мотором 3 для обеспечения вспомогательной мощности через второй контроллер мотора 300, чтобы удовлетворить потребляемой мощности колеса. Когда потребляемая мощность колеса меньше фактической мощности двигателя, модуль управления транспортным средством 400 управляет первым мотором 2 для выработки электроэнергии через контроллер первого мотора 200 и подачи электроэнергии на другие элементы двухмоторного транспортного средства 1000.
Модуль управления транспортным средством 400 дополнительно вычисляет целевую мощность первого мотора или целевую мощность второго мотора на основе фактического крутящего момента двигателя и потребности в крутящем моменте на колёсах.
Целевую мощность первого мотора можно вычислять по следующей формуле 13.
 Формула 13
Формула 13
Среди них, - целевой крутящий момент первого мотора; - потребность в крутящем моменте на колёсах транспортного средства; - передаточное число от двигателя 1 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи; - фактический крутящий момент двигателя; - передаточное число от второго мотора 2 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи.
Целевую мощность второго мотора можно вычислять по следующей формуле 14.
 Формула 14
Формула 14
Среди них, - целевой крутящий момент второго мотора; - потребность в крутящем моменте на колёсах транспортного средства; - фактический крутящий момент двигателя; - значение крутящего момента второго мотора в последний момент; - передаточное число от двигателя 1 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи;  - передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи.
- передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи.
Модуль управления транспортным средством 400 управляет крутящим моментом на входном валу так, чтобы он повышался ступенчато второй длиной шага каждое заданное время, и управляет крутящим моментом второго мотора, чтобы он уменьшался ступенчато второй длиной шага каждое заданное время. По меньшей мере, в одном примере осуществления настоящей заявки, заданное время составляет 10 миллисекунд (мс) для поддержания крутящего момента на колёсах 7 транспортного средства неизменным. Длина второго шага может быть такой же или отличаться от длины первого шага.
Крутящий момент на входному валу можно вычислять по следующей формуле 15.
 Формула 15
Формула 15
Среди них, -крутящий момент на входному валу; - значение крутящего момента входного вала в предыдущий момент,  - величина второго шага; - передаточное число от двигателя 1 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи;
- величина второго шага; - передаточное число от двигателя 1 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи; - целевой крутящий момент первого мотора;
- целевой крутящий момент первого мотора;  - передаточное число от мотора 2 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи; - требуемый крутящий момент двигателя.
- передаточное число от мотора 2 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи; - требуемый крутящий момент двигателя.
Потребность в крутящем моменте второго мотора можно вычислять по следующей формуле 16.
 Формула 16
Формула 16
Среди них, - крутящий момент второго мотора; - значение крутящего момента второго мотора в последний момент; - длина второго шага; - передаточное число от второго мотора 3 к колесам транспортного средства 7 в режиме параллельной гибридной второй передачи,  - потребность в целевом крутящем моменте второго мотора.
- потребность в целевом крутящем моменте второго мотора.
После того, что завершается обмена крутящим моментом, крутящий момент на входном валу, передаваемый двигателем 1 на входной вал 8, является основным источником крутящего момента на колёсах.
Когда первая передача параллельного гибрида переключается на вторую передачу параллельного гибрида, Модуль управления транспортным средством 400 вышеупомянутого двухмоторного транспортного средства 1000 использует второй мотор 3 для поддержания крутящего момента, необходимого для колес 7 транспортного средства, и после завершения переключения, двигатель 1 используется для обеспечения крутящего момента, необходимого для колес 7 транспортного средства, чтобы обеспечивало плавный переход крутящего момента на колесах во время процесса переключения режима и хорошую плавность. В то же время, это уменьшает требования к производительности тормозов, сцеплений и других элементов в процессе переключения передач и может увеличить срок годности тормозов, сцеплений и других элементов. В то же время, это снижает уровень сложности во время процесса переключения передач двухмоторных транспортных средств 1000. Фиг.7 представляет собой модульную схему операционной среды двухмоторного транспортного средства 1000. Двухмоторное транспортное средство 1000 также включает в себя память 102, процессор 103, коммуникационную шину 104 и сетевой интерфейс 105. Среди них, сетевой интерфейс 105 устанавливает передачи данных между двухмоторным транспортным средством 1000 и сервером или другими электронными оборудованиями.
Память 102 храняет программный код. Память 102 может представлять собой электроцепь с функцией хранения, которая не имеет физической формы в интегральной схеме, такие как планка оперативной памяти, TF-карта(Trans-flash Card ), смарт-медиа-карта (smart media card), SD-карта (secure digital card ), флэш-карта (flash card) и другие устройства хранения данных. Память 102 может обмениваться данными с процессором 103 через коммуникационную шину 104. Память 102 может включать в себя операционную систему A и систему управления переключением передач B. Операционная система A представляет собой программу, которая управляет и контролирует аппаратные и программные ресурсы двухмоторного транспортного средства 1000 и поддерживает работу системы управления переключением передач и другого программного обеспечения и/или программ.
Процессор 103 может включать в себя один или несколько микропроцессоров,цифровых процессоров. Процессор 103 может вызывать программный код, которые хранит в памяти 102, для выполнения связанных функций. Упомянутый процессор 103 также называется центральным процессором (CPU, Central Processing Unit)), представляет собой очень большую интегральную схему, которая является операционным ядром (Core) и ядром управления.
(Control Unit). Например, система управления переключением передач B представляет собой программный код, которые хранят в памяти 102 и исполняются процессором 103 для реализации способа управления переключением передач.
Кроме того, система управления переключением передач B может взаимодействовать с двигателем 1, первым мотором 2, вторым мотором 3, тормозом 4, сцеплением 5, дифференциалом 6 и колесами 7 транспортного средства для выполнения способа управления переключением передач.
Также см. фиг. 8, на котором представлена схема процесса способа управления переключением передач. Способ управления переключением передач включает в себя следующие шаги:
Шаг S10, в режиме параллельной гибридной первой передач модуль, получить скорость вращения двигателя 1 и фактический крутящий момент двигателя, и потребность в крутящем моменте на колёсах.
По меньшей мере, в одном примере осуществления настоящей заявки, получают скорость вращения двигателя и фактический крутящий момент двигателя 1 через систему управления двигателем 100. Потребность в крутящем моменте на колёсах получается на основе справочной таблицы сигналов педали акселератора, сигналов скорости транспортного средства.
Шаг S11, получить потребностью в крутящем моменте двигателя в соответствии с скоростью вращения двигателя и потребность в крутящем моменте на колёсах.
По меньшей мере в одном варианте осуществления настоящей заявки, потребностью в крутящем моменте двигателя получается путем вышеупомянутой таблице 1. Таблица 1 сформирована по стилю описания выше, никаких дополнительных подробностей здесь приводиться не будет.
Шаг S12, вычислить фактическую мощность двигателя на первой передаче параллельного гибрида на основе фактического крутящего момента двигателя и потребляемую мощность колеса на основе потребности в крутящем моменте на колёсах.
По меньшей мере в одном примере осуществления, фактическую мощность двигателя можно рассчитать по формуле 1, описанной выше. Потребляемую мощность колеса можно рассчитать по формуле 2, описанной выше никаких дополнительных подробностей здесь приводиться не будет.
Шаг S13, сравнить фактическую мощность двигателя и потребляемую мощность колеса и управлять рабочим режимом первого мотора 2 или второго мотороа 3 на основе результатов сравнения между ними.
По меньшей мере в одном примере осуществления, когда потребляемая мощность колеса больше или равна фактической мощности двигателя, второй мотор 3 обеспечивает вспомогательную мощность, чтобы удовлетворить потребляемой мощности колеса. Когда потребляемая мощность колеса меньше фактической мощности двигателя, первый мотор 2 вырабатывает электричество для подачи напряжения на другие элементы двухмоторного транспортного средства 1000. Когда первый мотор 2 работает, потребность в крутящем моменте первого электродвигателя можно вычислять по вышеупомянутой формуле 7.
По меньшей мере в одном примере осуществления, потребность в крутящем моменте первого мотора можно вычислять по вышеупомянутой формуле 3, потребность в крутящем моменте второго мотора можно вычислять по вышеупомянутой формуле 4, никаких дополнительных подробностей здесь приводиться не будет.
Шаг S14, при получении сигнала переключения назначенного переключения передач, Двухмоторный автомобиль 1000 работает на первом этапе, чтобы крутящий момент на колёсах обеспечиваемым электродвигателем 1 через входной вал 8 переключается на крутящий момент на колёсах обеспечиваемым вторым мотором 3.
По меньшей мере, в одном примере осуществления настоящей заявки, сигнал переключения назначенной передачи дает команду двухмоторному транспортному средству 1000, чтобы он переключится с первой передачи параллельного гибрида на вторую передачу параллельного гибрида.
По меньшей мере в одном примере осуществления настоящей заявки, управлять крутящим моментом на входном валу так, чтобы он уменьшался ступенчато второй длиной шага каждое заданное время, и управлять крутящим моментом второго мотора, чтобы он повышался ступенчато второй длиной шага каждое заданное время. По меньшей мере в одном примере осуществления настоящей заявки, заданное время составляет 10 миллисекунд (мс) для поддержания крутящего момента на колёсах 7 транспортного средства неизменным. Режим изменения крутящего момента на входному валу можно вычислять по следующей формуле 5. Режим изменения крутящего момента второго мотора можно вычислять по следующей формуле 6.
По меньшей мере в одном примере осуществления настоящей заявки, в течении первой этапы Т1, тормоз 4 управляется во включённом состоянии, а сцепление 5 находится в выключенном состоянии.
Шаг S15, двухмоторное транспортное средство 1000 работает на второй этапе Т2, чтобы управляет сочетанием между тормозом 4 и солнечной шестерней 13.
По меньшей мере, в одном примере осуществления настоящей заявки, модуль управления транспортным средством 400 контролирует давление масла в тормозе, которое должно быть снижено до точки полумуфты(Kiss point, KP), чтобы тормоз 4 соединился с солнечной шестерней 13. Цепление 5 находится в выключенном состоянии.
Шаг S16, двухмоторное транспортное средство 1000 работает на третьем этапе Т3, чтобы использует первый мотор 2 для регулировки скорости вращения двигателя 1 до заданной скорости вращения на второй передаче параллельного гибрида.
По меньшей мере в одном примере осуществления настоящей заявки, на третьем этапе Т3, двухмоторное транспортное средство 1000 работает в режиме последовательного гибрида. то есть, тормоз 4 и сцепление 5 находятся в выключенном состоянии.
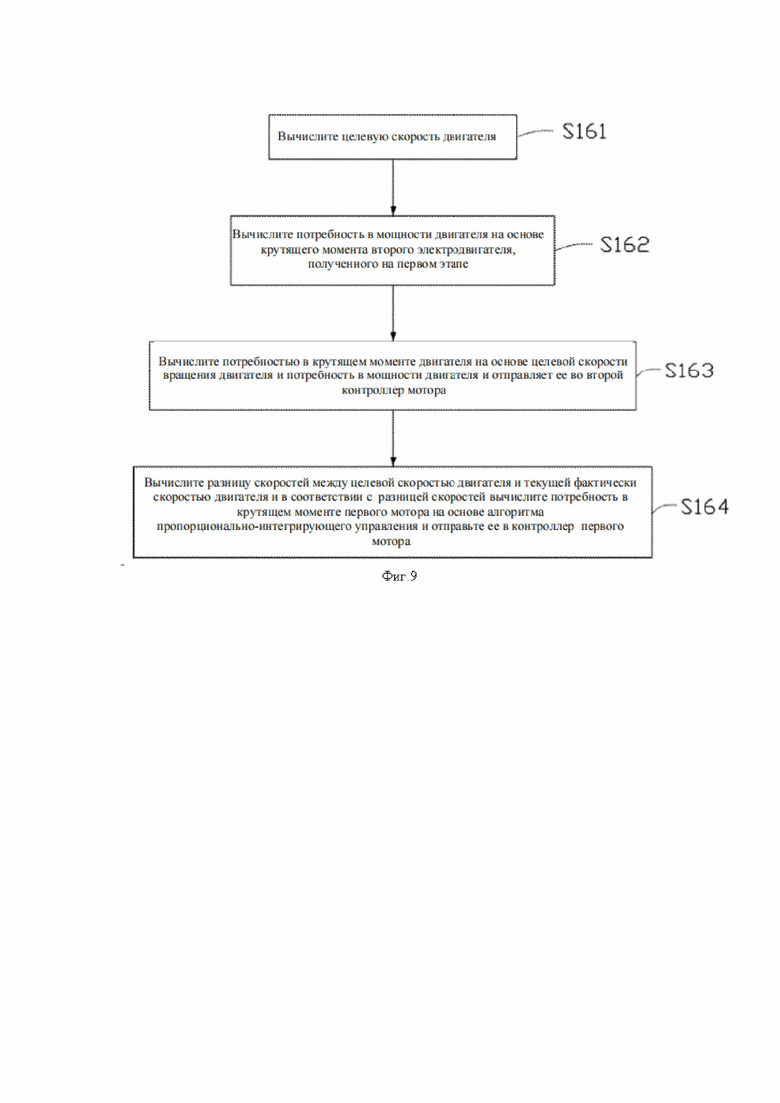
См. вместе фиг. 9, по меньшей мере в одном примере осуществления настоящей заявки, шаг S16 конкретно включает в себя следующие шаги: шаг S161; вычислить целевой скорости вращения двигателя;
Шаг S162, вычислить потребность в мощности двигателя на основе крутящего момента второго мотора, полученного на первом этапе T1;
Шаг S162, вычисляет потребностью в крутящем моменте двигателя на основе целевой скорости вращения двигателя и потребность в мощности двигателя и отправляет ее во второй контроллер мотора 300 .
Шаг S164, вычислить разницу скоростей между целевой скоростью двигателя и текущей фактически скоростью двигателя и в соответствии с разницей скоростей вычислите потребность в крутящем моменте первого мотора на основе алгоритма пропорционально-интегрирующего управления и отправить ее в контроллер первого мотора.
По меньшей мере в одном примере осуществления настоящей заявки, целевая скорость вращения двигателя представляет собой скорость вращения двигателя на второй передаче параллельного гибрида.
По меньшей мере, в одном примере осуществления настоящей заявки, потребность в крутящем моменте первого мотора используется в качестве потребности в крутящем моменте обратной связи, которая вместе с потребностью в крутящем моменте второго мотора приводит к регулированию скорости вращения двигателя до целевой.
По меньшей мере, в одном примере осуществления настоящей заявки, в текущем режиме последовательного гибрида, потребность в мощности двигателя включает в себя потребность в мощности второго мотора и других элементов. То есть часть мощности двигателя передается второму мотору 3, а другая часть - другим аксессуарам. Поскольку второй мотор 3 подает движущую силу на колеса 7 транспортного средства в конце первой этапе Т1, модуль управления транспортным средством 400 может рассчитать потребность в крутящем моменте второго мотора в соответствии с потребностью в крутящем моменте на колёсах, целевая скорость вращения двигателя можно вычислять по вышеупомянутой формуле 10, потребность в крутящем моменте второго мотора можно вычислять по вышеупомянутой формуле 8, потребность в мощности двигателя можно вычислять по вышеупомянутой формуле девять, потребностью в крутящем моменте двигателя можно вычислять вышеупомянутой формуле 11, потребность в крутящем моменте первого мотора можно вычислять по вышеупомянутой формуле 12, никаких дополнительных подробностей здесь приводиться не будет.
По меньшей мере, в одном примере осуществления настоящей заявки, потребность в крутящем моменте первого мотора можно вычислять по вышеупомянутой формуле 12, никаких дополнительных подробностей здесь приводиться не будет.
Шаг S17, двухмоторное транспортное средство 1000 работает на четвертой этапе Т4, чтобы управляет сцеплением 5 во включённом состоянии.
Когда обнаруживается, что разница скоростей между двумя концами сцепления 5 находится в пределах 50 об/мин (revolutions per minute, rpm ), модуль управления транспортным средством 400 управляет сцеплением 5 для повышения давления масла (как показано на фиг. 4), чтобы сцепление 5 было во включенном состоянии.
Шаг S18, двухмоторное транспортное средство 1000 работает на пятом этапе T5, чтобы крутящий момент на колёсах обеспечиваемым вторым мотором 3 переключается на крутящий момент на колёсах обеспечиваемым двигателем 1 через входной вал 8.
По меньшей мере в одном примере осуществления настоящей заявки, управлять крутящим моментом на входном валу так, чтобы он уменьшался ступенчато второй длиной шага каждое заданное время, и управлять крутящим моментом второго мотора, чтобы он повышался ступенчато второй длиной шага каждое заданное время. По меньшей мере, в одном примере осуществления настоящей заявки заданное время составляет 10 миллисекунд (мс). Длина второго шага может быть такой же или отличаться от длины первого шага, чтобы поддержало крутящий момент на колёсах 7 транспортного средства неизменным. Режим изменения крутящего момента на входному валу можно вычислять по вышеупомянутой формуле 15. Режим изменения крутящего момента второго мотора можно вычислять по вышеупомянутой формуле 16.
По меньшей мере в одном примере осуществления настоящей заявки, в течении первой этапы Т1, тормоз 4 управляется в выключенном состоянии, а сцепление 5 находится во включённом состоянии.
Вышеупомянутая система управления переключением передач B и способ переключения передач, когда первая передача параллельного гибрида переключается на вторую передачу параллельного гибрида, используется второй мотор 3 для поддержания крутящего момента, необходимого для колес 7 транспортного средства, и после завершения переключения, двигатель 1 используется для обеспечения крутящего момента, необходимого для колес 7 транспортного средства, чтобы обеспечивало плавный переход крутящего момента на колесах во время процесса переключения режима и хорошую плавность. В то же время это уменьшает требования к производительности тормозов, сцеплений и других элементов в процессе переключения передач и может увеличить срок годности тормозов, сцеплений и других элементов. В то же время, это снижает уровень сложности во время процесса переключения передач двухмоторных транспортных средств 1000.
Обычные специалисты в данной области техники должны понимать, что вышеупомянутые примеры осуществления используются только для объяснения настоящей заявки и не используются для ограничения настоящей заявки, пока это находится в пределах духовной сущности настоящей заявки, соответствующие изменения, внесенные в вышеупомянутые примеры осуществления, попадают в объем охраны, заявленной настоящей заявкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2615083C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ ДАННЫХ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ, УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ | 2021 |
|
RU2761015C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613749C1 |
| СПОСОБ УПРАВЛЕНИЯ РАСЦЕПЛЕНИЕМ СКОЛЬЗЯЩЕЙ ШЕСТЕРНИ | 2017 |
|
RU2719115C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657624C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2510474C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| УСТРОЙСТВО РЕКУПЕРАТИВНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2658614C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2631150C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОЧКАМИ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2010 |
|
RU2528476C2 |
Изобретение относится к транспортным средствам. В способе управления переключением передач двухмоторного транспортного средства, при получении сигнала переключения передач, переключают крутящий момент, обеспечиваемый двигателем через входной вал, на крутящий момент обеспечиваемый вторым мотором. Управляют сочетанием между тормозом и солнечной шестерней. Используют первый мотор для регулирования скорости вращения двигателя до целевой скорости, соответствующей целевой передаче. Управляют сцеплением во включенном состоянии. Переключаются с крутящего момента, обеспечиваемого вторым мотором, на крутящий момент, обеспечиваемый двигателем через входной вал. Повышается плавность переключения режимов. 3 н. и 7 з.п. ф-лы, 9 ил.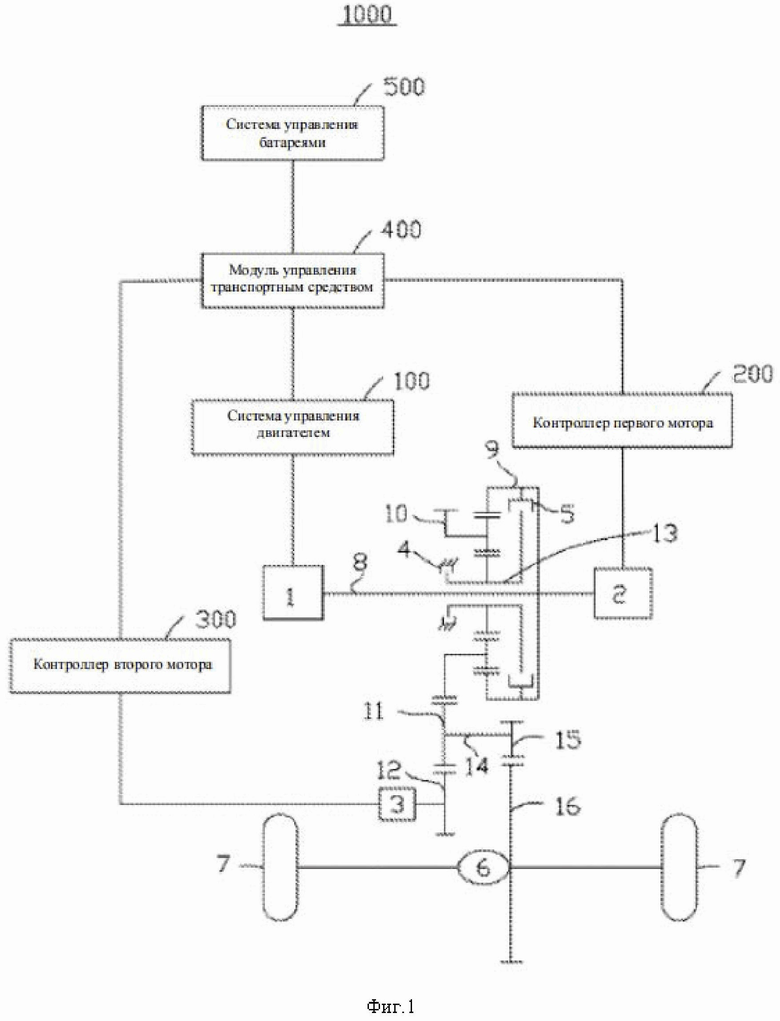
1. Способ управления переключением передач, применяемый к двухмоторному транспортному средству; упомянутое двухмоторное транспортное средство включает в себя двигатель, первый мотор, второй мотор, тормоз, сцепление и колеса транспортного средства, отличающийся тем, что упомянутый способ управления переключением передач включает в себя:
при получении назначенного сигнала переключения передач упомянутое двухмоторное транспортное средство переключается с крутящего момента на колёсах, обеспечиваемого упомянутым двигателем через входной вал, на крутящий момент на колёсах, обеспечиваемый упомянутым вторым мотором;
упомянутое двухмоторное транспортное средство управляет сочетанием между упомянутым тормозом и солнечной шестерней;
упомянутое двухмоторное транспортное средство использует упомянутый первый мотор для регулирования скорости вращения упомянутого двигателя до целевой скорости вращения двигателя, соответствующей целевой передаче;
упомянутое двухмоторное транспортное средство управляет упомянутым сцеплением во включенном состоянии;
упомянутое двухмоторное транспортное средство переключается с крутящего момента на колёсах, обеспечиваемого упомянутым вторым мотором, на крутящий момент на колёсах, обеспечиваемый упомянутым двигателем через упомянутый входной вал.
2. Способ управления переключением передач по п. 1, отличающийся тем, что шаг переключения крутящего момента на колёсах, обеспечиваемого упомянутым двигателем через входной вал, на крутящий момент на колёсах, обеспечиваемый упомянутым вторым мотором в двухмоторном транспортном средстве, включает в себя:
управление крутящим моментом на упомянутом входном валу так, чтобы он повышался ступенчато второй длиной шага каждое заданное время, и управление крутящим моментом упомянутого второго мотора, чтобы он уменьшался ступенчато второй длиной шага каждое заданное время, чтобы поддержать крутящий момент на упомянутых колёсах транспортного средства неизменным.
3. Способ управления переключением передач по п. 2, отличающийся тем, что шаг использования двухмоторного транспортного средства для регулирования скорости вращения упомянутого двигателя до целевой скорости упомянутого двигателя, соответствующей упомянутой целевой передаче, включает в себя:
вычисление целевой скорости вращения двигателя; среди них целевая скорость вращения двигателя представляет собой скорость вращения двигателя после переключения передач;
потребность в мощности двигателя рассчитывается на основе крутящего момента упомянутого мотора, когда крутящий момент на входному валу равен нулю;
потребность в крутящем моменте двигателя рассчитывается в соответствии с целевой скоростью вращения упомянутого двигателя и потребностью в мощности упомянутого двигателя;
вычисление разницы скоростей между целевой скоростью упомянутого двигателя и текущей фактической скоростью упомянутого двигателя и в соответствии с разницей скоростей вычисление потребности в крутящем моменте первого мотора на основе алгоритма пропорционально-интегрирующего управления; упомянутая потребность в крутящем моменте первого мотора используется в качестве потребности в крутящем моменте обратной связи, которая вместе с потребностью в крутящем моменте упомянутого второго мотора приводит к регулированию скорости вращения упомянутого двигателя до целевой.
4. Способ управления переключением передач по п. 1, отличающийся тем, что передача также включает в себя:
когда обнаруживается, что разница скоростей между двумя концами упомянутого сцепления находится в пределах 50 об/мин (revolutions per minute, rpm), модуль управления транспортным средством управляет упомянутым сцеплением для повышения давления масла, чтобы упомянутое сцепление было во включенном состоянии.
5. Способ управления переключением передач по п. 1, отличающийся тем, что шаг переключения упомянутого двухмоторного транспортного средства с крутящего момента на колёсах, обеспечиваемого упомянутым вторым электродвигателем, на крутящий момент на колёсах, обеспечиваемый упомянутым двигателем через упомянутый входной вал, включает в себя:
управление крутящим моментом на упомянутом входном валу так, чтобы он повышался ступенчато второй длиной шага каждое заданное время, и управление крутящим моментом упомянутого второго мотора, чтобы он уменьшался ступенчато второй длиной шага каждое заданное время, чтобы поддержать крутящий момент на упомянутых колёсах транспортного средства неизменным.
6. Способ управления переключением передач по п. 1, отличающийся тем, что назначенный сигнал переключения передач дает команду двухмоторному транспортному средству переключиться с первой передачи параллельного гибрида на вторую передачу параллельного гибрида, способ управления переключением передач также включает в себя:
на упомянутой первой передаче параллельного гибрида получение скорости вращения упомянутого двигателя и фактического крутящего момента двигателя, а также получение потребности в крутящем моменте на колёсах;
получение потребности в крутящем моменте двигателя в соответствии со скоростью вращения двигателя и потребностью в крутящем моменте на колёсах;
вычисление фактической мощности упомянутого двигателя на первой передаче упомянутого параллельного гибрида в соответствии с фактическим крутящим моментом упомянутого двигателя и потребляемой мощности колеса на основе потребности в крутящем моменте на упомянутых колёсах;
сравнение фактической мощности упомянутого двигателя и мощности с потребляемой мощностью упомянутого колеса и контроль рабочего режима первого или второго мотора на основе результатов сравнения.
7. Способ управления переключением передач по п. 6, отличающийся тем, что передача также включает в себя:
когда потребляемая мощность упомянутого колеса больше или равна фактической мощности упомянутого двигателя, управление вторым упомянутым мотором для обеспечения вспомогательной мощности на упомянутых колёсах транспортного средства, чтобы удовлетворить потребляемой мощности упомянутого колеса;
когда потребляемая мощность упомянутого колеса меньше фактической мощности упомянутого двигателя, управление упомянутым первым мотором для вырабатывания электричества и подачи её на другие элементы упомянутого двухмоторного транспортного средства.
8. Способ управления переключением передач по п. 1, отличающийся тем, что упомянутое двухмоторное транспортное средство использует упомянутый первый электродвигатель для регулирования скорости вращения упомянутого двигателя до целевой скорости вращения двигателя, соответствующей целевой передаче, упомянутое двухмоторное транспортное средство работает в режиме последовательного гибрида.
9. Система управления переключением передач, включающая память и процессор, отличающаяся тем, что упомянутый процессор реализует вышеупомянутый способ управления переключением передач по любому из пп. 1-8 при выполнении кода компьютерной программы, хранящегося в упомянутой памяти.
10. Двухмоторное транспортное средство, включающее память и процессор, отличающееся тем, что упомянутый процессор реализует вышеупомянутый способ управления переключением передач по любому из пп. 1-8 при выполнении кода компьютерной программы, хранящегося в упомянутой памяти.
| CN 104859638 A, 26.08.2015 | |||
| CN 113619586 A, 09.11.2021 | |||
| CN 114658841 A, 24.06.2022 | |||
| СПОСОБ ГЕНЕРИРОВАНИЯ ДАННЫХ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ, УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ | 2021 |
|
RU2761015C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИЗМЕНЕНИЕМ РЕЖИМА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2669660C1 |
| ПРИВОДНАЯ СИСТЕМА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2534465C2 |

