Изобретение относится к акустическим способам активной локации, в основе функционирования которых лежит двойной эффект Доплера, в соответствии с которым происходит смещение частоты волн при отражении их от движущихся тел. В излучающем тракте устройства, реализующем режимы как доплеровских измерений, так и моностатического эхолотирования, в соответствии с предлагаемым способом, используются несколько параметрических излучающих антенн (ПИА), обеспечивающие формирование сигналов разностной частоты (СРЧ) с высокой направленностью в широкой полосе частот. В акустическом доплеровском способе профилирования скоростей течений в водной среде измерения предлагается осуществлять на нескольких рабочих сигналах разностной частоты, что позволит выбирать необходимую скоростную чувствительность, увеличить точность определения скорости судна-носителя как относительно дна, так и относительно слоистой водной среды. Сопоставление доплеровских сдвигов для различных глубин на рабочих сигналах между собой дает возможность дополнительно получать уточненные данные о распределении направлений и величин скоростей морских течений в звукорассеивающих слоях водной среды по глубине, т.е. исследовать в импульсном режиме тонкую структуру пространственно-временных характеристик поля скорости морских течений. Область использования -гидроакустика, океанология.
Известен однолучевой доплеровский способ измерения скорости корабля относительно дна или неподвижных объектов (см. К. Клей, Г. Медвин. Акустическая океанография. Основы и применения. - пер. с англ., Под ред. Ю.Ю. Житковского. - М.: Мир, 1980. с. 357-361) в воде, заключающийся в том, что:
1) останавливают в днище судна-носителя гидроакустической аппаратуры антенный блок из двух электроакустических преобразователей (ЭАП) с разными режимами работы - излучающий и приемный, акустические оси апертур каждого из ЭАП находятся в диаметральной плоскости (ось X) судна, в паре акустические оси ЭАП - параллельны и направлены вперед по курсу в сторону морского дна;
2) обеспечивают за счет использования движителя перемещение судна - носителя с компонентой скорости  в диаметральной плоскости (ось X) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось У) с компонентой скорости
в диаметральной плоскости (ось X) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось У) с компонентой скорости  , в результате чего относительно дна судно - носитель движется с путевой скоростью
, в результате чего относительно дна судно - носитель движется с путевой скоростью 
3) вырабатывают в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна - носителя с путевой скоростью  непрерывный гармонический сигнал с частотой ƒ, поступающий на пьезоэлемент излучающего ЭАП;
непрерывный гармонический сигнал с частотой ƒ, поступающий на пьезоэлемент излучающего ЭАП;
4) создают в водной среде, за счет как обратного пьезоэффекта, так и интерференции волновых процессов с частотой ƒ, ультразвуковую (УЗ) волну, распространяющуюся в водной среде к морскому дну со скоростью С в виде узкого пучка с угловой шириной θ0,7 по уровню 0,7, у которого акустическая ось расположена в диаметральной плоскости судна под углом Θд к плоскости горизонта;
5) определяют в соответствии с эффектом Доплера величину частоты  УЗ волны, дошедшей до заданной области морского дна, которая, распространяясь в водной среде вперед (нос), совпадает с компонентой скорости движения судна-носителя относительно дна;
УЗ волны, дошедшей до заданной области морского дна, которая, распространяясь в водной среде вперед (нос), совпадает с компонентой скорости движения судна-носителя относительно дна;
6) облучают наклонно как объем водной среды, заполненный k слоями движущихся каждый по-своему подвижных рассеивателей (пузырьки, взвешенные частицы, планктон и нектон, различные неоднородности и т.п.), так и несимметричный относительно акустических осей обоих ЭАП участок дна эллипсовидной формы, формируя как возникающий уже в момент излучения маскирующий объемный реверберационный процесс, так и запаздывающий донный эхосигнал;
7) принимают на фоне объемной реверберационной помехи донный эхосигнал, который попадает на пьезоэлемент приемного ЭАП уже под углом  к плоскости горизонта за счет перемещения судна-носителя на расстояние
к плоскости горизонта за счет перемещения судна-носителя на расстояние  в течение времени t прохождения УЗ волной со скоростью звука С в водной среде пути «излучающий ЭАП - дно - приемный ЭАП»;
в течение времени t прохождения УЗ волной со скоростью звука С в водной среде пути «излучающий ЭАП - дно - приемный ЭАП»;
8) вырабатывают за счет прямого пьезоэффекта электрический сигнал с частотой колебаний  поступающий в приемный тракт гидроакустической аппаратуры движущегося судна - носителя с компонентой скорости относительно дна;
поступающий в приемный тракт гидроакустической аппаратуры движущегося судна - носителя с компонентой скорости относительно дна;
9) вырабатывают в приемном тракте гидроакустической аппаратуры электрический сигнал с доплеровской частотой  экспериментально определив которую, можно произвести расчет компоненты скорости движения судна относительно дна с определенной погрешностью;
экспериментально определив которую, можно произвести расчет компоненты скорости движения судна относительно дна с определенной погрешностью;
10) отображают, регистрируют и документируют результаты измерений в аппаратуре.
Данный способ реализован в доплеровском лаге для измерения скорости корабля относительно дна или неподвижных объектов в воде (см. пат. США №2908888 "Acoustic logs", Kurkland R. Int.Cl G01S 15/60, опубл. 13.10.1959), содержащем генератор, соединенный с излучающим ЭАП, приемный ЭАП, соединенный через резонансный усилитель и частотный дискриминатор с блоком вторичной обработки доплеровской информации, причем, второй вход частотного дискриминатора соединен с выходом генератора. Генератор вырабатывает непрерывный гармонический сигнал с частотой ƒ, поступающий на излучающий ЭАП, формирующий в воде как прямо по курсу, так и в сторону дна УЗ пучок под углом ΘД к горизонту и с угловой шириной θ0,7 основного лепестка характеристики направленности (ХН) по уровню 0,7.
В соответствии с двойным эффектом Доплера дно можно рассматривать сначала как приемник, а затем как переизлучатель УЗ волн (см. Гидроакустическая энциклопедия. Под общ. ред. В.И. Тимошенко. - Таганрог, Издательство ТРТУ. 2000. с. 215-217). Вследствие движения судна с компонентой скорости  относительно дна частота УЗ колебаний волны, дошедшей до дна, будет равна
относительно дна частота УЗ колебаний волны, дошедшей до дна, будет равна

За время t прохождения УЗ сигнала со скоростью звука С в среде пути «излучающий ЭАП - дно - приемный ЭАП» корабль переместится на расстояние  и эхосигнал от дна попадет на приемный ЭАП уже под углом
и эхосигнал от дна попадет на приемный ЭАП уже под углом  Частота колебаний эхосигнала, пришедшего на приемный ЭАП от поверхности дна, будет равна
Частота колебаний эхосигнала, пришедшего на приемный ЭАП от поверхности дна, будет равна

Приемный ЭАП вырабатывает электрический сигнал с частотой ƒ2 = ƒ + ƒD дон, который через резонансный усилитель поступает на первый вход частотного дискриминатора, на второй вход которого с выхода генератора подается электрический сигнал с частотой ƒ. На выходе частотного дискриминатора вырабатывается напряжение с частотой ƒD дон, подаваемое на вход блока вторичной обработки доплеровской информации.
В рассматриваемом случае зависимость доплеровского приращения частоты ƒD дон от компоненты скорости движения корабля  имеет вид
имеет вид

откуда видно, что по доплеровскому сдвигу частот ƒD дон можно измерить компоненту скорости судна  (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с. 62).
(см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с. 62).
Разлагая (3) в степенной ряд и ограничиваясь лишь членами второго порядка малости, а также тем, что для реальных скоростей морских судов можно принять  выражение (3) примет вид
выражение (3) примет вид

Из выражения (4) видно, что зависимость доплеровского приращения частоты от компоненты скорости движения судна носит нелинейный характер.
Данный способ и реализующее его устройство имеет недостатки и ограничения в применении, связанные с малой точностью косвенного измерения скорости движения судна, что обусловлено большими погрешностями при определении доплеровского сдвига частоты, он не позволяет определять поперечный снос относительно курса судна, так как отсутствует учет влияния компоненты скорости  в траверзном направлении. Кроме того, существенным ограничением рассмотренного метода является отсутствие пространственного разрешения, т.е. такая доплеровская навигационная система с непрерывным излучением УЗ сигнала не может различать эхосигналы от рассеивателей, расположенных в соседних слоях озвученного водного объема и движущихся каждый по-своему, что не позволяет получать данные о тонкой структуре распределения скорости течения по глубине.
в траверзном направлении. Кроме того, существенным ограничением рассмотренного метода является отсутствие пространственного разрешения, т.е. такая доплеровская навигационная система с непрерывным излучением УЗ сигнала не может различать эхосигналы от рассеивателей, расположенных в соседних слоях озвученного водного объема и движущихся каждый по-своему, что не позволяет получать данные о тонкой структуре распределения скорости течения по глубине.
Известно, что облучение рассеивающей поверхности коническим пучком звуковых волн приводит к расширению доплеровского спектра частот, причем, ширина этого спектра приблизительно может быть оценена из соотношения (см. Виницкий А.С. Очерки основ радиолокации при непрерывном излучении радиоволн. М., Сов. Радио, 1961)

Появление доплеровского спектра частот вызывает погрешности в определении доплеровского сдвига по двум причинам:
1) величина мгновенной частоты доплеровского спектра флюктуирует относительно среднего значения частоты спектра, причем, в данном случае флуктуационная относительная погрешность измерения скорости судна  доплеровским лагом может быть оценена из соотношения (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с. 85)
доплеровским лагом может быть оценена из соотношения (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с. 85)

где λд - доплеровская длина волны сигнала; Т - время усреднения результатов N измерений мгновенных значений частоты ƒD пришедшего сигнала. Из (6) следует, что для уменьшения флуктуационной погрешности желательно уменьшать угловую ширину θ0,7 главного максимума ХН по уровню 0,7 и длину волны доплеровского λд рассеянного сигнала при увеличении времени усреднения T;
2) максимум энергии доплеровского спектра не соответствует центральной доплеровской частоте и смещен в сторону низких частот, что обусловлено имеющимися различиями как в условиях распространения излученного сигнала в направлениях крайних лучей (ближний и дальний по курсу судна проходят разные по длине трассы), так и в условиях их рассеяния дном, которое имеет угловую зависимость силы донного рассеяния. Относительная погрешность измерения скорости судна за счет деформации огибающей доплеровского спектра эхосигнала, обусловленная параметрами лага  и параметрами среды распространения (β - коэффициент затухания сигнала лага, χ - коэффициент обратного донного рассеяния для выбранного угла наклона акустической оси антенны, Н - глубина под килем судна), может быть оценена из соотношения
и параметрами среды распространения (β - коэффициент затухания сигнала лага, χ - коэффициент обратного донного рассеяния для выбранного угла наклона акустической оси антенны, Н - глубина под килем судна), может быть оценена из соотношения

Из (7) следует, что для уменьшения погрешности смещения максимума энергии доплеровского спектра следует уменьшать угловую ширину θ0,7 главного максимума ХН по уровню 0,7 и не использовать в качестве рабочих УЗ сигналы, испытывающие значительное пространственное затухание; знак (-) в правой части выражения (7) означает, что величины измеряемой скорости движения судна будут занижены по сравнению с истинной.
Таким образом, как метод, так и реализующий его однолучевой лаг неудовлетворительно работают при кренах и дифферентах судна, при его вертикальных перемещениях, значительна погрешность при измерении скорости судна, невозможно определять его поперечный относительно курса снос, отсутствует возможность выбора необходимой для изменяющихся условий лоцирования частоты зондирующего сигнала, и, соответственно, дальности действия устройства. Доплеровский лаг для измерения скорости корабля относительно дна или неподвижных объектов в воде не позволяет получать данные о тонкой структуре распределения скорости течения по глубине в облучаемом измерительном объеме водной среды, геометрические размеры которого определяются как угловой шириной основного лепестка ХН, так и боковым полем приемно-излучающей системы ЭАП.
Известен также двухлучевой доплеровский способ измерения скорости корабля (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с. 62), относительно дна или неподвижных объектов в воде, заключающийся в том, что:
1) устанавливают в днище судна-носителя гидроакустической аппаратуры антенный блок из четырех ЭАП, скомбинированных попарно по режиму работы - излучающий и приемный, акустические оси апертур каждого из ЭАП находятся в диаметральной плоскости (ось X) судна, в парах акустические оси параллельны, направлены как вперед (нос), так и назад (корма) по курсу в две области морского дна;
2) приводят в движение относительно дна судно - носитель с компонентой скорости в диаметральной плоскости (ось X), которое за счет внешних воздействий начинает двигаться и в траверзной плоскости (ось У) с компонентой скорости ;
3) вырабатывают в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна - носителя с путевой скоростью  непрерывный гармонический сигнал с частотой ƒ, поступающий на пьезоэлементы двух излучающих ЭАП,
непрерывный гармонический сигнал с частотой ƒ, поступающий на пьезоэлементы двух излучающих ЭАП,
4) создают в водной среде, за счет как обратного пьезоэффекта, так и интерференции волновых процессов с частотой ƒ, две УЗ волны, распространяющиеся в водной среде к морскому дну со скоростью С в виде узких пучков с угловой шириной θ0,7 по уровню 0,7, у которых акустические оси расположены под углом ΘД к плоскости горизонта в сторону морского дна, причем, направлены как вперед (нос), так и назад (корма) по курсу в диаметральной плоскости (ось X) судна;
5) определяют в соответствии с эффектом Доплера величины частот  УЗ волн, дошедших до заданных областей морского дна, распространяясь в водной среде как вперед (нос), так и назад (корма) по курсу движения судна-носителя с компонентой скорости относительно дна;
УЗ волн, дошедших до заданных областей морского дна, распространяясь в водной среде как вперед (нос), так и назад (корма) по курсу движения судна-носителя с компонентой скорости относительно дна;
6) облучают наклонно как впереди (нос), так и позади (корма) по курсу как объемы водной среды, заполненные k слоями движущихся каждый по-своему подвижных рассеивателей (пузырьки, взвешенные частицы, планктон и нектон, различные неоднородности и т.п.), а также несимметричные относительно акустических осей обоих пар ЭАП участки дна эллипсовидной формы, формируя как возникающие уже в момент излучения маскирующие объемные реверберационные процессы, так и запаздывающие донные эхосигналы;
7) принимают на фоне объемной реверберационной помехи донные эхосигналы, которые попадают на пьезоэлементы приемных ЭАП уже под углами к плоскости горизонта за счет перемещения судна-носителя на расстояние  в течение времени t прохождения УЗ волнами со скоростью звука С в водной среде пути «излучающий ЭАП - дно - приемный ЭАП»;
в течение времени t прохождения УЗ волнами со скоростью звука С в водной среде пути «излучающий ЭАП - дно - приемный ЭАП»;
8) вырабатывают за счет прямого пьезоэффекта электрические сигналы с частотами колебаний

 поступающие в приемный тракт гидроакустической аппаратуры движущегося судна - носителя с компонентой скорости относительно дна;
поступающие в приемный тракт гидроакустической аппаратуры движущегося судна - носителя с компонентой скорости относительно дна;
9) вырабатывают в приемном тракте гидроакустической аппаратуры электрический сигнал с доплеровской частотой  экспериментально определив которую, можно произвести расчет компоненты скорости движения судна
экспериментально определив которую, можно произвести расчет компоненты скорости движения судна  с определенной погрешностью;
с определенной погрешностью;
10) отображают, регистрируют и документируют результаты измерений в аппаратуре.
Данный способ реализован в доплеровской навигационной системе (см. пат. США №3277430 "Independent direction reƒerence system", Hagemann J. et al., Int.Cl G01S 15/60, опубл. 04.10.1966), в котором излучение УЗ волн производится вдоль диаметральной плоскости судна, в сторону носа и кормы под одним и тем же углом к горизонту Θд, содержащий генератор, соединенный с двумя излучающими ЭАП, два приемных ЭАП, соединенных через резонансные усилители с частотным дискриминатором, выход которого соединен с входом блока обработки и индикации.
Генератор вырабатывает непрерывный гармонический сигнал с частотой ƒ, поступающий на излучающие ЭАП, формирующие в воде в сторону дна два УЗ пучка под углом Θд к горизонту и с угловой шириной θ0,7 основного максимума ХН по уровню 0,7. УЗ пучки лежат в диаметральной плоскости «нос - корма» и сигналы распространяются как по курсу судна, так и в противоположную сторону. Отраженные от дна колебания со стороны носа и со стороны кормы поступают на соответствующие приемные ЭАП, вырабатывающие электрические сигналы с частотами соответственно

Доплеровский сдвиг частот «нос - корма» в этом случае составит  и выражение для скорости движения судна запишется в виде
и выражение для скорости движения судна запишется в виде

Данный двухлучевой доплеровский навигационный лаг обладает преимуществами перед однолучевым, так как из (10) следует линейная зависимость доплеровского частотного сдвига от скорости судна; а погрешности в определении доплеровского частотного сдвига по вышеперечисленным пунктам 1, 2, 4 практически устранены. Но метод и реализующее его устройство не позволяют определять поперечный снос относительно курса судна, так как отсутствует учет влияния компоненты скорости в траверзном направлении. Однако часть причин, препятствующих достижению заявляемого технического результата и ограничивающих точность косвенного измерения скорости движения судна, с помощью данного двухлучевого доплеровского лага, реализующего данный метод, осталась. Так, такая система тоже не может различать эхосигналы от рассеивателей, расположенных в соседних слоях озвученного водного объема и движущихся каждый по-своему, что не позволяет получать данные о тонкой структуре распределения скорости течения по глубине в реальном масштабе времени.
Основные погрешности при определении доплеровского сдвига частоты для двухлучевого лага обусловлены следующими причинами:
1) использование в расчетах постоянной усредненной скорости звука (в морской среде скорость может изменяться в пределах от 1435 до 1540 м/с);
2) замена пучка УЗ волны с угловой шириной θ0,7 по уровню 0,7 идеализированной «однолучевой и недифрагирующей» моделью волновых процессов, распространяющихся под углом кΘд плоскости горизонта в сторону морского дна;
3) внутри измерительных объемов в водной среде рассеиватели могут образовывать слоистые структуры, в пределах которых переноситься течением, находясь на разных удалениях от ЭАП в различных направлениях и с произвольными по величине скоростями, в результате чего доплеровский сигнал представляет собой суперпозицию доплеровских сигналов различной частоты, причем, пространственное разрешение слоистых структур с рассеивателями неосуществимо в данном устройстве.
Следует отметить, что относительные погрешности измерения скорости судна по этим указанным причинам имеют величины одного порядка, как для однолучевой, так и двухлучевой схем построения доплеровских лагов, причем, разработаны различные методы компенсации изменений скорости звука, что уменьшает влияние погрешности по пункту 1 (см. А.В. Богородский, Г.В. Яковлев и др. Гидроакустическая техника исследования и освоения океана. Л.: Гидрометеоиздат, 1984, с. 60).
В то же время флуктуационная погрешность и погрешность смещения максимума энергии доплеровского спектра и для двухлучевой схемы построения доплеровского лага приводит к существенной неизменной погрешности измерения скорости судна вследствие расширения доплеровского спектра частот (см. соотношения (6) и (7)); двухлучевая схема построения лага не позволяет определять поперечный относительно курса снос судна; в данном устройстве реализован лишь режим измерения с использованием сигналов донной реверберации, в то время как сигналы объемной реверберации не используются для получения дополнительной информации о скорости подводных течений. Для определения не только продольной, но и поперечной составляющих скорости судна применяют четырехлучевые доплеровские системы.
Признаки, совпадающие с заявляемым способом:
1) устанавливают в днище судна-носителя гидроакустической аппаратуры антенный блок из электроакустических преобразователей (ЭАП) с разными режимами работы - излучающий и приемный, акустические оси апертур каждого из ЭАП находятся в диаметральной плоскости (ось X) судна, попарно параллельны и направлены наклонно к плоскости горизонта в сторону морского дна;
2) приводят в движение относительно дна судно - носитель с компонентой скорости  в диаметральной плоскости (ось X), которое за счет внешних воздействий начинает двигаться и в траверзной плоскости (ось У) с компонентой скорости
в диаметральной плоскости (ось X), которое за счет внешних воздействий начинает двигаться и в траверзной плоскости (ось У) с компонентой скорости 
3) вырабатывают в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна - носителя с путевой скоростью  непрерывный гармонический сигнал с частотой ƒ, поступающий на пьезоэлемент излучающего ЭАП;
непрерывный гармонический сигнал с частотой ƒ, поступающий на пьезоэлемент излучающего ЭАП;
4) создают за счет обратного пьезоэффекта и интерференции волновых процессов с частотой ƒ УЗ волны, которые распространяются в слоистой водной среде, обладающей пространственной изменчивостью поля скоростей течений, к морскому дну со скоростью С в виде узких пучков с угловой шириной θ0,7 по уровню 0,7, у которых акустические оси расположена под углом Θд к плоскости горизонта в сторону морского дна, причем, УЗ волны распространяются в выбранных направлениях в диаметральной плоскости (ось X) судна;
5) облучают УЗ энергией области рассеивателей (пузырьки, взвешенные частицы, планктон и нектон, различные неоднородности и т.п.), которые движутся со скоростью различных течений в k слоях объема водной среды, а также участки дна, причем объемы водной среды и участки дна расположены по ходу и против движения в диаметральной плоскости (ось X) судна, что формирует маскирующие объемные реверберационные процессы и донные эхосигналы;
6) принимают на фоне объемной реверберационной помехи донные эхосигналы, которые попадают на пьезоэлементы приемных ЭАП под углом  к плоскости горизонта за счет перемещения судна-носителя на расстояния
к плоскости горизонта за счет перемещения судна-носителя на расстояния  в течение времени t прохождения УЗ волной со скоростью звука С в водной среде пути «излучающие ЭАП - дно - приемные ЭАП»;
в течение времени t прохождения УЗ волной со скоростью звука С в водной среде пути «излучающие ЭАП - дно - приемные ЭАП»;
7) вырабатывают в приемном тракте гидроакустической аппаратуры соответствующие электрические сигналы с доплеровскими частотами, экспериментально определив которые, можно произвести расчет компонент скорости движения судна  относительно дна с определенной погрешностью;
относительно дна с определенной погрешностью;
8) отображают, регистрируют и документируют результаты измерений в аппаратуре.
В качестве прототипа принят четырехлучевой доплеровский способ измерения путевой скорости корабля относительно дна (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с. 62-65), заключающийся в том, что:
1) устанавливают в днище судна-носителя гидроакустической аппаратуры электроакустические преобразователи (ЭАП), объединенные в антенный блок:
- восемь из которых формируют четырехлучевую характеристику направленности (ХН) типа «Янус», - скомбинированы в пары «излучающий ЭАП-принимающий ЭАП», акустические оси апертур каждой из двух пар ЭАП находятся во взаимноперпендикулярных плоскостях судна -носителя: -диаметральной (ось X) и траверзной (ось У), акустические оси в парах ЭАП - параллельны, а для каждой из двух пар ЭАП - направлены относительно курса - вперед (нос) и назад (корма), а также - влево (левый борт, л.б.) и вправо (правый борт, п.б.) в четыре взаимноперпендикулярные области морского дна, реализуя доплеровский способ измерений в диаметральном и траверзном измерительных каналах гидроакустической аппаратуры;
- каждый ЭАП снабжен многоэлементным пьезоэлементом с полосой пропускания Δƒ и узлами экранировки, гидро-, электро- и шумоизоляции, соединен кабелем с аппаратурой;
2) обеспечивают за счет использования движителя перемещение судна - носителя с компонентой скорости  в диаметральной плоскости (ось X) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось У) с компонентой скорости
в диаметральной плоскости (ось X) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось У) с компонентой скорости  в результате чего относительно дна судно - носитель движется со путевой скоростью
в результате чего относительно дна судно - носитель движется со путевой скоростью 
3) генерируют в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна - носителя непрерывный электрический сигнал с частотой ƒ01, находящийся в полосе пропускания Δƒ многоэлементных пьезоэлементов,
и синхронно подают его на многоэлементные пьезоэлементы излучающих ЭАП для обоих пар во взаимноперпендикулярных плоскостях -диаметральной (ось X) и траверзной (ось У) - судна -носителя;
4) формируют ультразвуковые (УЗ) волны, распространяющиеся наклонно в водной среде со скоростью С в виде узких пучков с угловой шириной θ0,7 по уровню 0,7,
и осуществляют акустические контакты с подвижными и неподвижными рассеивателями во взаимоперпендикулярно расположенных как в объемах слоистой водной среды, так и участках дна соответственно,
причем, пучки находятся относительно судна-носителя:- впереди (нос) и сзади (корма), а также - слева (левый борт) и справа (правый борт);
5) регистрируют донные эхосигналы многоэлементными пьезоэлементами приемных ЭАП антенного блока с четырехлучевой ХН типа «Янус», которые попарно находятся во взаимноперпендикулярных диаметральной (ось X) и траверзной (ось У) плоскостях судна -носителя;
6) преобразуют регистрируемые эхосигналы в электрические сигналы с частотами колебаний


где  - определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с рассеивателями, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости
- определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с рассеивателями, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости  относительно дна;
относительно дна;
 - продольная компонента путевой скорости судна-носителя относительно дна;
- продольная компонента путевой скорости судна-носителя относительно дна;
 - поперечная компонента путевой скорости судна-носителя относительно дна;
- поперечная компонента путевой скорости судна-носителя относительно дна;
Θд - угол наклона акустических осей узких УЗ пучков относительно плоскости горизонта
и передают их в приемный тракт гидроакустической аппаратуры;
7) вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки электрические сигналы с доплеровскими частотами

где  - доплеровские сдвиги частот электрических сигналов УЗ волны с частотой ƒ01 для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости
- доплеровские сдвиги частот электрических сигналов УЗ волны с частотой ƒ01 для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости  относительно дна
относительно дна
и рассчитывают за счет вторичной обработки путевую скорость и движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно дна, а также угол смещения
компоненты относительно дна, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам:
направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам:

где  - скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;

где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;

8) отображают, регистрируют и документируют результаты измерений в аппаратуре.
Данный способ реализован в доплеровской навигационной системе (см. пат. США №3257638 "Doppler navigation system", Kritz J., Int.Cl G01S 15/60, опубл. 21.06.1966), содержащей генератор, соединенный с четырьмя излучающими ЭАП, четыре приемных ЭАП, соединенных через четыре резонансных усилителя попарно с двумя частотными дискриминаторами, выходы которых соединены с блоком обработки и индикации. Генератор вырабатывает электрический гармонический сигнал с частотой ƒ0 = 1МГц, поступающий на четыре излучающих ЭАП, формирующих в водной среде в сторону дна четыре УЗ пучка с углом наклона 30° к вертикали и с угловой шириной около 3° основного лепестка ХН по уровню 0,7. Отраженные от дна колебания поступают на приемные ЭАП, образующие вместе с излучающими пары - «нос (н)» и «корма (к)» в диаметральной плоскости судна, а также - «лев. борт (л.б.)» и «прав. борт (п.б.)» в его траверзной плоскости, что позволит определить как продольную, так и поперечную составляющие скорости судна относительно дна. Приемные ЭАП вырабатывают электрические сигналы с частотами  (см. соотношения (8) - (9)) и через резонансные усилители подают их на два входа каждого из двух частотных дискриминаторов, образуя два канала выделения доплеровских частот (см. соотношение (10))- диаметральный («нос» и «корма») и траверзный («лев. борт» и «прав. борт»). Выходы дискриминаторов соединены с блоком вторичной обработки доплеровской информации, который выдает информацию о путевой скорости движения и угле сноса судна относительно курса.
(см. соотношения (8) - (9)) и через резонансные усилители подают их на два входа каждого из двух частотных дискриминаторов, образуя два канала выделения доплеровских частот (см. соотношение (10))- диаметральный («нос» и «корма») и траверзный («лев. борт» и «прав. борт»). Выходы дискриминаторов соединены с блоком вторичной обработки доплеровской информации, который выдает информацию о путевой скорости движения и угле сноса судна относительно курса.
Признаки, совпадающие с заявляемым способом:
1) устанавливают в днище судна-носителя гидроакустической аппаратуры электроакустические преобразователи (ЭАП), объединенные в антенный блок:
- восемь, из которых формируют четырехлучевую характеристику направленности (ХН) типа «Янус», - скомбинированы в пары «излучающий ЭАП-принимающий ЭАП», акустические оси апертур каждой из двух пар ЭАП находятся во взаимноперпендикулярных плоскостях судна - носителя: - диаметральной (ось X) и траверзной (ось У), акустические оси в парах ЭАП - параллельны, а для каждой из двух пар ЭАП - направлены относительно курса - вперед (нос) и назад (корма), а также - влево (левый борт, л.б.) и вправо (правый борт, п.б.) в четыре взаимноперпендикулярные области морского дна, реализуя доплеровский способ измерений в диаметральном и траверзном измерительных каналах гидроакустической аппаратуры;
- каждый ЭАП снабжен многоэлементным пьезоэлементом с полосой пропускания Δƒ и узлами экранировки, гидро-, электро- и шумоизоляции, соединен кабелем с аппаратурой;
2) обеспечивают за счет использования движителя перемещение судна - носителя с компонентой скорости в диаметральной плоскости (ось X) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось У) с компонентой скорости в результате чего относительно дна судно - носитель движется со путевой скоростью 
3) генерируют в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна - носителя непрерывный электрический сигнал с частотой ƒ01, находящийся в полосе пропускания Δƒ многоэлементных пьезоэлементов,
и синхронно подают его на многоэлементные пьезоэлементы излучающих ЭАП для обоих пар во взаимноперпендикулярных плоскостях -диаметральной (ось X) и траверзной (ось У) - судна -носителя;
4) формируют ультразвуковые (УЗ) волны, распространяющиеся наклонно в водной среде со скоростью С в виде узких пучков с угловой шириной θ0,7 по уровню 0,7,
и осуществляют акустические контакты с подвижными и неподвижными рассеивателями во взаимоперпендикулярно расположенных как в объемах слоистой водной среды, так и участках дна соответственно,
причем, пучки находятся относительно судна-носителя:- впереди (нос) и сзади (корма), а также - слева (левый борт) и справа (правый борт);
5) регистрируют донные эхосигналы многоэлементными пьезоэлементами приемных ЭАП антенного блока с четырехлучевой ХН типа «Янус», которые попарно находятся во взаимноперпендикулярных диаметральной (ось X) и траверзной (ось У) плоскостях судна -носителя;
6) преобразуют регистрируемые эхосигналы в электрические сигналы с частотами колебаний, в соответствии с (11), где  - определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с рассеивателями, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости
- определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с рассеивателями, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости  относительно дна;
относительно дна;
 - продольная компонента путевой скорости судна-носителя относительно дна;
- продольная компонента путевой скорости судна-носителя относительно дна;
 - поперечная компонента путевой скорости судна-носителя относительно дна;
- поперечная компонента путевой скорости судна-носителя относительно дна;
Θд - угол наклона акустических осей узких УЗ пучков относительно плоскости горизонта,
и передают их в приемный тракт гидроакустической аппаратуры;
7) вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки электрические сигналы с доплеровскими частотами в соответствии с (12), где  - доплеровские сдвиги частот электрических сигналов УЗ волны с частотой ƒ01 продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости
- доплеровские сдвиги частот электрических сигналов УЗ волны с частотой ƒ01 продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости  относительно дна
относительно дна
и рассчитывают за счет вторичной обработки путевую скорость и движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно дна, а также угол смещения
компоненты относительно дна, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам, в соответствии с (13), (14) и (15).
направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам, в соответствии с (13), (14) и (15).
В данном способе и устройстве, его реализующем, тоже использован лишь режим измерения путевой скорости судна с использованием донных эхосигналов, в то время как сигналы объемной реверберации не используются для получения дополнительной информации о скорости подводных течений. Ограничения по точности (флуктуационная погрешность (6) и погрешность смещения максимума энергии (7) доплеровского спектра) косвенного измерения путевой скорости движения судна, с помощью данного четырехлучевого доплеровского лага, также остались. Их наличие и отрицательное влияние обусловлены определенной пространственной избирательностью (направленностью) находящихся в среде лоцирования излучающих и приемных ЭАП, т.е. их способностью излучать (принимать) УЗ волны в одних направлениях в большей степени, чем в других. Так, во всех рассмотренных выше доплеровских системах среда распространения необходима лишь для переноса энергии продольной УЗ волны «разрежения - сжатия» в прямом и обратном направлениях (см. Ультразвук. Маленькая энциклопедия. Под ред. И.П. Голяминой. - М.:Сов. энциклопедия, с. 221-223, 351).
Пространственное разрешение, т.е. способность к различению эхосигналов от рассеивателей, расположенных в соседних слоях озвученного водного объема и движущихся каждый по-своему, в рассмотренных выше доплеровских навигационных системах для измерения путевой скорости корабля относительно дна может быть достигнуто за счет использования импульсного режима. В промышленных образцах доплеровских лагов преимущественно используется импульсный режим излучения с низкой частотой следования зондирующих импульсов в двух разновидностях: с постоянными и переменными длительностью и периодом следования импульсов, причем, недостатком таких систем является ограничение по минимальной глубине под килем (см. Бородин В.И., Смирнов Г.Е., Толстякова Н.А., Яковлев Г.В. Гидроакустические навигационные средства. Л.: Судостроение, с. 154-160). Для повышения помехоустойчивости и точности измерений в гидроакустических лагах используется импульсный режим с переменными в зависимости от глубины под килем судна длительностью импульсов τИ и периодом их повторения Тсл при постоянстве скважности Q = Тсл/τИ. Длительность излучаемых импульсов регулируется по закону τИ = 2D/С, где D - текущее значение наклонной дальности до дна, С - скорость звука в воде, т.е. излучение зондирующего импульса продолжается до тех пор? пока эхо-сигнал от переднего фронта излученного импульса, отразившись от дна, не подойдет к антенне, переключаемой с этого момента на прием. При увеличении глубины под килем судна формирующие эпюру импульсного режима стробы τИ, τР, τП (длительности зондирующего импульса, подавления эхосигналов объемной реверберации и приема эхосигналов донной реверберации соответственно) пропорционально растягиваются, при уменьшении глубины - сжимаются, сохраняя заданное для них соотношение (см. Гусев Н.М., Яковлев Г.В. Гидроакустические доплеровские лаги.- Судостроение за рубежом, 1976, №5, с. 53-66). Длительность приемного строба обычно равна длительности строба излучения либо несколько превышает его, причем, некоторое время после окончания импульса излучения приемный тракт в известных доплеровских лагах держат закрытым с целью подавления наиболее интенсивных сигналов объемной реверберации и длительность τР зависит от глубины под килем судна так же, как длительность импульсов и период их следования. Таким образом, скважность импульсов принимает значение Q>2 и выбор конкретного значения данного параметра определяется следующим - при увеличении скважности лучше осуществляется подавление реверберационной помехи, но одновременно ухудшаются условия сглаживания флуктуаций доплеровской частоты, обусловленные природой доплеровского сигнала.
Обобщенная структурная схема импульсного лага включает блоки стандартных эхо-импульсных систем, в которых обработка гидроакустической информации проходит следующие этапы: 1) предварительная обработка сигналов, 2) первичная (пространственно-временной) обработка сигналов, 3) вторичная обработка информации, 4)отображение, регистрация и документирование информации (см. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. Глава 8. Аппаратура обработки гидроакустической информации, стр. 237-277. - СПб.: Наука. - 2004, 410 с.). Основной недостаток импульсного режима работы существующих доплеровских лагов - неполное использование общего времени работы лага для целей измерения доплеровской частоты, причем, для устранения этого недостатка предложено использовать многочастотный импульсный режим (см. Бородин В.И., Смирнов Г.Е., Толстякова Н.А., Яковлев Г.В. Гидроакустические навигационные средства. - Л.: Судостроение, 1983, с. 159), совмещающий в себе достоинство непрерывного режима излучения с точки зрения полного использования для целей измерения доплеровской частоты общего времени работы лага и преимущество импульсного режима, устраняющего реверберационную помеху.
Реализация в данных устройствах режима измерения скорости течений в водной среде, т.е. акустического доплеровского профилирования течений (АДПТ), потребует кроме этого еще и применение дополнительного более высокочастотного приемно-излучающего доплеровского тракта, который работает в режиме измерения относительной скорости судна по сигналам объемной реверберации. Для упрощения электронной аппаратуры данных устройств частоты излучаемых колебаний в высокочастотном и низкочастотном приемно-излучающих трактах целесообразно выбирать кратными (см. Бородин В.И., Смирнов Г.Е., Толстякова Н.А., Яковлев Г.В. Гидроакустические навигационные средства.- Л.: Судостроение, 1983, с. 224).
Задачей изобретения является расширение эксплуатационных качеств гидроакустической аппаратуры, в частности, акустических доплеровских профилографов течений (АДПТ) в водной среде, за счет использования эффектов нелинейной акустики.
Задача обеспечивается осуществлением в импульсном многочастотном режиме измерений параметров тонкой структуры пространственно-временных характеристик поля скорости морских течений в водной среде при использовании АДПТ.
Технический результат изобретения заключается в возможности определения абсолютной скорости движения судна-носителя АДПТ в диаметральном и траверзном каналах на рабочих сигналах разностной частоты при функционировании в режиме параметрического излучения ЭАП антенного блока.
Технический результат достигается тем, что в четырехлучевом доплеровском способе измерения путевой скорости судна относительно дна, заключающимся в том, что:
1) устанавливают в днище судна-носителя гидроакустической аппаратуры электроакустические преобразователи (ЭАП), объединенные в антенный блок:
- восемь, из которых формируют четырехлучевую характеристику направленности (ХН) типа «Янус», - скомбинированы в пары «излучающий ЭАП-принимающий ЭАП», акустические оси апертур каждой из двух пар ЭАП находятся во взаимноперпендикулярных плоскостях судна-носителя: -диаметральной (ось X) и траверзной (ось У), акустические оси в парах ЭАП - параллельны, а для каждой из двух пар ЭАП - направлены относительно курса - вперед (нос) и назад (корма), а также - влево (левый борт, л.б.) и вправо (правый борт, п.б.) в четыре взаимноперпендикулярные области морского дна, реализуя доплеровский способ измерений в диаметральном и траверзном измерительных каналах гидроакустической аппаратуры, каждый ЭАП снабжен многоэлементным пьезоэлементом с полосой пропускания Δƒ и узлами экранировки, гидро-, электро- и шумоизоляции, соединен кабелем с аппаратурой;
2) обеспечивают за счет использования движителя перемещение судна - носителя с компонентой скорости  в диаметральной плоскости (ось X) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось У) с компонентой скорости
в диаметральной плоскости (ось X) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось У) с компонентой скорости  в результате чего относительно дна судно - носитель движется со путевой скоростью
в результате чего относительно дна судно - носитель движется со путевой скоростью 
3) генерируют в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна - носителя непрерывный электрический сигнал с частотой ƒ01, находящийся в полосе пропускания Δƒ многоэлементных пьезоэлементов,
и синхронно подают его на многоэлементные пьезоэлементы излучающих ЭАП для обоих пар во взаимноперпендикулярных плоскостях -диаметральной (ось X) и траверзной (ось У) - судна -носителя;
4) формируют ультразвуковые (УЗ) волны, распространяющиеся наклонно в водной среде со скоростью С в виде узких пучков с угловой шириной θ0,7 по уровню 0,7,
и осуществляют акустические контакты с подвижными и неподвижными рассеивателями во взаимоперпендикулярно расположенных как в объемах слоистой водной среды, так и участках дна соответственно,
причем, пучки находятся относительно судна-носителя: - впереди (нос) и сзади (корма), а также - слева (левый борт) и справа (правый борт);
5) регистрируют донные эхосигналы многоэлементными пьезоэлементами приемных ЭАП антенного блока с четырехлучевой ХН типа «Янус», которые попарно находятся во взаимноперпендикулярных диаметральной (ось X) и траверзной (ось У) плоскостях судна -носителя;
6) преобразуют регистрируемые эхосигналы в электрические сигналы с частотами колебаний (11)
где  - определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с рассеивателями, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости
- определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с рассеивателями, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости  относительно дна;
относительно дна;
 - продольная компонента путевой скорости судна-носителя относительно дна;
- продольная компонента путевой скорости судна-носителя относительно дна;
 - поперечная компонента путевой скорости судна-носителя относительно дна;
- поперечная компонента путевой скорости судна-носителя относительно дна;
ΘД - угол наклона акустических осей узких УЗ пучков относительно плоскости горизонта,
и передают их в приемный тракт гидроакустической аппаратуры;
7) вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки электрические сигналы с доплеровскими частотами (12)

где  - доплеровские сдвиги частот электрических сигналов УЗ волны с частотой ƒ01 продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости
- доплеровские сдвиги частот электрических сигналов УЗ волны с частотой ƒ01 продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости  относительно дна
относительно дна
и рассчитывают за счет вторичной обработки путевую скорость и движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно дна, а также угол смещения
компоненты относительно дна, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам (13)- (15):
направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам (13)- (15):

где  - скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;

где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
в отличие от прототипа
8) устанавливают в антенный блок дополнительный ЭАП, который выполнен обратимым, реализуя схему моностатического эхолотирования, и расположен как в фазовом центре четырех пар ЭАП, используемых в доплеровском способе измерений, так и в горизонтальной плоскости (X, У) относительно судна-носителя, акустическая ось ЭАП совпадает с осью (Z) перпендикулярной горизонтальной плоскости, дополнительный обратимый ЭАП снабжен многоэлементным пьезоэлементом с полосой пропускания Δƒ и узлами экранировки, гидро-, электро- и шумоизоляции, соединен кабелем с аппаратурой;
9) регистрируют отсутствие акустического контакта с донными рассеивателями, которое осуществлялось посредством приемных ЭАП антенного блока с четырехлучевой ХН типа «Янус» (http://raut.md/wp-content/uploads/2015/08/Dopier_LAG.pdf, https://www.msmi.ru/upload/folders/edu_lit/kaf/tss/2017_23.pdf,) при выходе судна-носителя гидроакустической аппаратуры на участок глубокой водной среды;
10) генерируют дополнительно в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна - носителя непрерывный гармонический сигнал с частотой ƒ02, находящийся в полосе пропускания Δƒ многоэлементных пьезоэлементов ЭАП антенного блока, реализующего как доплеровский способ измерений, так и дополнительный - моностатический способ эхолотирования;
11) преобразуют в излучающем тракте гидроакустической аппаратуры колебания непрерывных электрических сигналов с частотами ƒ01,02 в кратковременные амплитудно-импульсные модулированные радиоимпульсы прямоугольной формы и усиливают по мощности полученные радиоимпульсы прямоугольной формы с несущими частотами ƒ01,02, синхронно подавая их на многоэлементные пьезоэлементы излучающих ЭАП антенного блока;
12) формируют за счет нелинейного эффекта взаимодействия в водной среде пять параметрических излучающих антенн (ПИА), в объемах которых распределены нелинейные источники спектральных компонент комбинационных частот,
и генерируют импульсные УЗ волны с разностной частотой (ВРЧ)  распространяющиеся для акустического контактирования с подвижными и неподвижными рассеивателями:
распространяющиеся для акустического контактирования с подвижными и неподвижными рассеивателями:
- наклонно в водной среде со скоростью С в виде четырех узких пучков с угловой шириной  по уровню 0,7, облучая ими взаимоперпендикулярно расположенные объемы слоистой водной среды и участки дна на линиях как курса, так и сноса судна-носителя,
по уровню 0,7, облучая ими взаимоперпендикулярно расположенные объемы слоистой водной среды и участки дна на линиях как курса, так и сноса судна-носителя,
- вертикально в водной среде со скоростью С в виде узкого пучка с угловой шириной  по уровню 0,7, облучая им расположенные друг над другом объемы слоистой водной среды и участок дна под судном;
по уровню 0,7, облучая им расположенные друг над другом объемы слоистой водной среды и участок дна под судном;
13) регистрируют и обрабатывают в приемных трактах аппаратуры судна-носителя эхосигналы, обусловленные акустическими контактами с подвижными и неподвижными рассеивателями, которые расположены как в объемах водной среды, так и на участках дна в соответствии с п. 12, реализуя на ВРЧ доплеровский способ измерений и моностатический способ эхолотирования;
14) осуществляют вертикальную пространственную стратификацию совокупностей рассеивателей водной среды на 1, 2, …, i, …, k горизонтах глубин за счет стробирования эхосигналов объемной реверберации в приемных трактах, задавая одинаковые значения:
ширины строба τi сл,
исходного расположения относительно дна,
скорости и последовательности перемещения строба
для получения по i горизонту глубин расчетных данных об величине скорости  течения;
течения;
15) преобразуют стробируемые эхосигналы объемной реверберации в электрические сигналы с частотами колебаний
где  - определяемые двойным эффектом Доплера величины частот ВРЧ
- определяемые двойным эффектом Доплера величины частот ВРЧ  которые несут информацию о акустических контактах с рассеивателями i-того слоя водной среды, где i от 1 до k, причем, при распространении ВРЧ соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости
которые несут информацию о акустических контактах с рассеивателями i-того слоя водной среды, где i от 1 до k, причем, при распространении ВРЧ соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости  и
и  относительно i-того слоя водной среды,
относительно i-того слоя водной среды,
- продольная компонента скорости судна относительно i-того слоя водной среды;
- поперечная компонента скорости судна относительно i-того слоя водной среды;
Θд - угол наклона акустических осей излучаемых пучков ВРЧ  относительно плоскости горизонта
относительно плоскости горизонта
и передают их в приемный тракт гидроакустической аппаратуры;
16) преобразуют принятые эхосигналы донной реверберации в электрические сигналы с частотами колебаний
где  - определяемые двойным эффектом Доплера величины частот ВРЧ, которые несут информацию об акустических контактах с донными рассеивателями, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости
- определяемые двойным эффектом Доплера величины частот ВРЧ, которые несут информацию об акустических контактах с донными рассеивателями, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости  относительно дна;
относительно дна;
 - продольная компонента путевой скорости судна-носителя относительно дна;
- продольная компонента путевой скорости судна-носителя относительно дна;
 - поперечная компонента путевой скорости судна-носителя относительно дна;
- поперечная компонента путевой скорости судна-носителя относительно дна;
Θд - угол наклона акустических осей излучаемых пучков ВРЧ  относительно плоскости горизонта
относительно плоскости горизонта
и передают их в приемный тракт гидроакустической аппаратуры;
17) вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки электрические сигналы с доплеровскими частотами

где  - доплеровский сдвиг частот электрических сигналов с величинами частот ВРЧ
- доплеровский сдвиг частот электрических сигналов с величинами частот ВРЧ  для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости
для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости  относительно i-того слоя водной среды
относительно i-того слоя водной среды
и определяют за счет вторичной обработки полученных электрических сигналов величину путевой скорости  движения судна-носителя, ее продольную
движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно i-того слоя водной среды, а также угол смещения
компоненты относительно i-того слоя водной среды, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна
направления вектора путевой скорости судна относительно диаметральной плоскости судна

где  - скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;

где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;


18) вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки электрические сигналы с доплеровскими частотами

где  - доплеровские сдвиги частот электрических сигналов ВРЧ
- доплеровские сдвиги частот электрических сигналов ВРЧ  для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт»- судна-носителя с компонентами путевой скорости
для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт»- судна-носителя с компонентами путевой скорости  относительно дна
относительно дна
и рассчитывают за счет вторичной обработки путевую скорость и движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно дна, а также угол смещения
компоненты относительно дна, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам:
направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам:

где  - скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;

где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
19) рассчитывают за счет вторичной обработки величины значений векторов скоростей течения  в i-том слое как векторную сумму вектора путевой скорости судна-носителя относительно дна, измеренной на сигналах донной реверберации и вектора путевой скорости судна-носителя относительно i-того слоя, измеренного на сигналах объемной реверберации, с учетом данных полученных в соответствии с пунктом 7 формулы;
в i-том слое как векторную сумму вектора путевой скорости судна-носителя относительно дна, измеренной на сигналах донной реверберации и вектора путевой скорости судна-носителя относительно i-того слоя, измеренного на сигналах объемной реверберации, с учетом данных полученных в соответствии с пунктом 7 формулы;
20) фиксируют результаты проведенных выше измерений и вычислений в виде объемных годографов скоростей течений в k слоях стратифицированного водного объема, глубину нахождения которых вычисляют за счет вертикального моностатического эхолотирования;
21) выбирают из полученного семейства (n-1) объемных годографов скоростей течений в к слоях стратифицированного водного объема данные, соответствующие заданной точности измерений;
22) отображают, регистрируют и документируют результаты измерений в аппаратуре.
Предлагаемый способ поясняется следующими чертежами.
На фиг. 1 показана структурная схема диаметрального канала АДПТ, реализующего предлагаемое изобретение (схема траверзного канала аналогична изображенной) на рабочих сигналах - накачки и ВРЧ, ориентация лучей в диаметральном плоскости судна-носителя АДПТ и их прохождение через модель слоистой водной среды.
На фиг. 2 представлено изображение антенного блока АДПТ с режимом параметрического излучения, где - 1 и 2 - излучающие и приемные ЭАП АДПТ с режимом параметрического излучения, формирующие для доплеровского способа измерений четырехлучевую ХН типа «Янус»; 3 и 4 - излучающий и приемный ЭАП эхолотного канала для моностатического способа эхолотирования.
Реализующий предлагаемый способ АДПТ с режимом параметрического излучения содержит генератор 1, соединенный через импульсный модулятор 2 и усилитель мощности 3 с пятью излучающими ЭАП 4 диаметрального и траверзного каналов, входящими в состав антенного блока 6. Для доплеровского способа измерений сформирована четырехлучевая ХН типа «Янус», т.е. применяют наклонное излучение четырех ЭАП 4 - диаметральный канал «нос», «корма» - блоки показаны на фиг. 1, траверзный канал «лев. борт», «прав. борт» - на фиг. 1 к ним показана связь 19, для моностатического способа эхолотирования - вертикальное излучение центрального ЭАП 4, расположенного в фазовом центре антенного блока 6. Для реализации доплеровского способа измерений четыре ЭАП 4 через водную среду 7, в которой перемещаются со скоростями течений совокупности рассеивателей 8 нейтральной плавучести, а также донную поверхность 9, акустически связаны с четырьмя приемными ЭАП 5 («нос», «корма», «лев. борт», «прав. борт»). Четыре пары ЭАП 4 и 5 объединены в антенный блок 6, в котором размещены попарно («нос»- «корма», «лев. борт» - «прав. борт») и установлены таким образом, чтобы осуществлять излучение (ЭАП 4) и прием (ЭАП 5) непрерывных УЗ колебаний под углом Θд к горизонту как в диаметральной, так и в траверзной плоскостях судна-носителя. Приемные ЭАП 5 («нос», «корма», «лев. борт», «прав. борт») соединены с входами резонансных усилителей 10, 11, настроенных соответственно на частоты - накачки ƒ01 и ВРЧ  причем, выходы резонансных усилителей 10, 11 с одинаковыми частотами настройки - накачки ƒ01 и ВРЧ
причем, выходы резонансных усилителей 10, 11 с одинаковыми частотами настройки - накачки ƒ01 и ВРЧ  и попарно с указанных направлений («нос» и «корма»; «лев. борт» и «прав. борт») соединены со входами частотных дискриминаторов (направление «нос» и «корма» и направление «лев. борт» и «прав. борт» - частотные дискриминаторы 14, 15), выходы которых соединены с соответствующими входами блока вторичной обработки доплеровской информации 16. В фазовом центре антенного блока 6 дополнительно установлены излучающий 4 и приемный 5 ЭАП, которые реализуют схему моностатического эхолотирования и расположены в горизонтальной плоскости (Х, У) относительно судна-носителя, их акустические оси ЭАП совпадают с осью (Z) перпендикулярной горизонтальной плоскости. В данном случае вход ЭАП 4 также соединен с генератором 1 через импульсный модулятор 2 и усилитель мощности 3, излучая УЗ вертикально ориентированный пучок через водную среду 7. В слоистой структуре воды 7 распределены и перемещаются со скоростями течений совокупности рассеивателей 8 нейтральной плавучести, что обусловливает возникновение акустических контактов как с ними, так и с донной поверхностью 9. Эхосигналы достигают приемного ЭАП 5 моностатического эхолотирования, который вырабатывает соответствующие электрические сигналы, поступающие через резонансный усилитель 12, настроенный на частоту ВРЧ
и попарно с указанных направлений («нос» и «корма»; «лев. борт» и «прав. борт») соединены со входами частотных дискриминаторов (направление «нос» и «корма» и направление «лев. борт» и «прав. борт» - частотные дискриминаторы 14, 15), выходы которых соединены с соответствующими входами блока вторичной обработки доплеровской информации 16. В фазовом центре антенного блока 6 дополнительно установлены излучающий 4 и приемный 5 ЭАП, которые реализуют схему моностатического эхолотирования и расположены в горизонтальной плоскости (Х, У) относительно судна-носителя, их акустические оси ЭАП совпадают с осью (Z) перпендикулярной горизонтальной плоскости. В данном случае вход ЭАП 4 также соединен с генератором 1 через импульсный модулятор 2 и усилитель мощности 3, излучая УЗ вертикально ориентированный пучок через водную среду 7. В слоистой структуре воды 7 распределены и перемещаются со скоростями течений совокупности рассеивателей 8 нейтральной плавучести, что обусловливает возникновение акустических контактов как с ними, так и с донной поверхностью 9. Эхосигналы достигают приемного ЭАП 5 моностатического эхолотирования, который вырабатывает соответствующие электрические сигналы, поступающие через резонансный усилитель 12, настроенный на частоту ВРЧ  и детектор 13, на дополнительный вход блока вторичной обработки доплеровской информации 16, а также на вход блока индикации и документирования информации 17. Функционирование в необходимом режиме блоков АДПТ осуществляется посредством блока управления 18, причем, для траверзного канала - предусмотрены связи 20, 21, а также связь 22 с блоком 17. Заявляемый способ реализуется следующим образом.
и детектор 13, на дополнительный вход блока вторичной обработки доплеровской информации 16, а также на вход блока индикации и документирования информации 17. Функционирование в необходимом режиме блоков АДПТ осуществляется посредством блока управления 18, причем, для траверзного канала - предусмотрены связи 20, 21, а также связь 22 с блоком 17. Заявляемый способ реализуется следующим образом.
Стартуя на мелководье, генератор 1 гидроакустической аппаратуры вырабатывает непрерывный электрический синусоидальный сигнал частотой ƒ01, поступающий через нормально открытый импульсный модулятор 2, переведенный в это состояние блоком управления 18, на вход усилителя мощности 3. Четыре ЭАП 4 («нос», «корма», «лев. борт», «прав. борт») излучают в водную среду 7 в направлении дна (вперед, назад, влево, вправо относительно направления «нос - корма», ось х) УЗ пучки с угловой шириной  по уровню 0,7, которые наклонены на угол
по уровню 0,7, которые наклонены на угол  относительно горизонта. УЗ колебания распространяются в водной среде 7, обладающей нелинейностью упругих характеристик, причем, при распространении в среде мощные УЗ сигналы испытывают накапливающиеся искажения профиля волны, что физически означает генерацию высших гармонических компонент 2ƒ01, 3ƒ01, …, nƒ01 и снижение энергетического потенциала сигнала накачки ƒ01 при расширении частотного диапазона зондирующего сигнала.
относительно горизонта. УЗ колебания распространяются в водной среде 7, обладающей нелинейностью упругих характеристик, причем, при распространении в среде мощные УЗ сигналы испытывают накапливающиеся искажения профиля волны, что физически означает генерацию высших гармонических компонент 2ƒ01, 3ƒ01, …, nƒ01 и снижение энергетического потенциала сигнала накачки ƒ01 при расширении частотного диапазона зондирующего сигнала.
Неоднородности водной среды 7 и ее границ (дно и поверхность) обусловливают появление полей рассеяния УЗ, которые в месте расположения приемных 5 и излучающих 4 ЭАП, создают эффект, называемый реверберацией, которую подразделяют на три вида: объемную, определяемую рассеянием звука на распределенных по всему объему воды рассеивателях (пузырьки, взвешенные частицы, планктон и нектон, различные неоднородности и т.п.), которые могут образовывать геометрические области в водной среде, называемые рассеивающими слоями 8 (см. Терминологический словарь-справочник по гидроакустике. Под ред. А.Е. Колесникова.- Л. Судостроение, 1989, с. 180); поверхностную, обусловленную рассеянием звука водной поверхностью и неоднородностями в приповерхностном слое; донную, характеризующуюся рассеянием от неровностей дна, причем, в нашем случае наиболее актуальны первый и третий виды. Однако, данная информация в устройстве не обрабатывается и не используется в связи с первоочередной необходимостью решения навигационных задач для судна-носителя. Далее, в тех же направлениях («нос», «корма», «лев. борт», «прав. борт») непрерывные УЗ сигналы достигают дна и отражаются от него, претерпевая для каждого сигнала соответствующий доплеровский сдвиг частоты (±ƒ0 D дон). Здесь (+) или (-), а также величина доплеровского сдвига частот дают информацию о параметрах движения судна - приближению или удалению относительно рассеивателей на донной поверхности, а также о значении путевой скорости судна  .
.
Ниже рассмотрим работу диаметрального (показан на фиг. 1) и траверзного каналов выделения доплеровских частот, так как функционирование каналов полностью аналогично. Отраженные от донной 9 поверхности колебания поступают на соответствующие приемные ЭАП 5 антенного блока 6 с четырехлучевой ХН типа «Янус», которые попарно находятся во взаимноперпендикулярных диаметральной (ось X) и траверзной (ось У) плоскостях судна-носителя. ЭАП 5 преобразуют регистрируемые эхосигналы в электрические сигналы с частотами колебаний (блоки 10)


где  - определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с донными рассеивателями 9, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости
- определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с донными рассеивателями 9, причем, при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости  относительно дна 9;
относительно дна 9;
 - продольная компонента путевой скорости судна-носителя относительно дна 9;
- продольная компонента путевой скорости судна-носителя относительно дна 9;
 - поперечная компонента путевой скорости судна-носителя относительно дна 9;
- поперечная компонента путевой скорости судна-носителя относительно дна 9;
Θд - угол наклона акустических осей узких УЗ пучков относительно плоскости горизонта и передают их в приемный тракт гидроакустической аппаратуры. Вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки (блоки 14, 15) электрические сигналы с доплеровскими частотами

где  - доплеровские сдвиги частот электрических сигналов УЗ волны с частотой /ql для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт»- судна-носителя с компонентами путевой скорости
- доплеровские сдвиги частот электрических сигналов УЗ волны с частотой /ql для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт»- судна-носителя с компонентами путевой скорости  относительно дна 9.
относительно дна 9.
Рассчитывают за счет вторичной обработки (блок 16) путевую скорость и движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно дна 9, а также угол смещения
компоненты относительно дна 9, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам:
направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам:

где  - скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;

где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;

При выходе судна-носителя гидроакустической аппаратуры на участок глубокой водной среды шельфа энергетического потенциала локационного устройства может быть недостаточно для осуществления акустического контакта со дном 9, что нарушает его работоспособность и обусловливает необходимость применения низкочастотного зондирующего излучения для реализации как доплеровских измерений, так и дополнительного режима работы - моностатического эхолотирования.
При регистрации отсутствия акустического контакта с донными рассеивателями 9 функционирование устройства в описанном выше режиме, т.е. при выходе судна-носителя гидроакустической аппаратуры на участок глубокой водной среды, осуществляются действия по реализации режима АДПТ с режимом параметрического излучения. По команде с блока управления 18 гидроакустическую аппаратуру переводят в импульсный режим и генерируют дополнительно в излучающем тракте гидроакустической аппаратуры (блоки 1, 2, 3) движущегося относительно дна 9 судна - носителя непрерывный гармонический сигнал с частотой ƒ02, находящийся в полосе пропускания Δƒ многоэлементных пьезоэлементов ЭАП 4 антенного блока 6, реализующего как доплеровский способ измерений, так и дополнительный - моностатический способ эхолотирования. Уточним, что в антенный блок 6 установлены дополнительные ЭАП 4, 5, с помощью которых реализуют схему моностатического эхолотирования, т.е. они расположены в геометрическом центре антенного блока 6 (фиг. 2), их акустические оси совпадают с вертикалью.
Итак, для реализации АДПТ с режимом РПИ преобразуют в излучающем тракте гидроакустической аппаратуры колебания непрерывных электрических сигналов с частотами ƒ01,02 в кратковременные амплитудно-импульсные модулированные радиоимпульсы прямоугольной формы и усиливают по мощности полученные радиоимпульсы прямоугольной формы с несущими частотами ƒ01,02, синхронно подавая их на многоэлементные пьезоэлементы излучающих ЭАП 4 антенного блока, реализующих как доплеровский способ измерений, так и моностатический способ эхолотирования. При распространении в водной среде 6 мощных импульсных сигналов формируют за счет нелинейного эффекта взаимодействия в водной среде пять параметрических излучающих антенн (ПИА), в объемах которых распределены нелинейные источники спектральных компонент комбинационных частот.В частности, генерируют импульсные УЗ волны с разностной частотой (ВРЧ)  распространяющиеся для акустического контактирования с подвижными и неподвижными рассеивателями:
распространяющиеся для акустического контактирования с подвижными и неподвижными рассеивателями:
- наклонно в водной среде 7 со скоростью С в виде четырех узких пучков с угловой шириной  по уровню 0,7, облучая ими взаимоперпендикулярно расположенные объемы 8 слоистой водной среды и участки дна 9 на линиях как курса, так и сноса судна-носителя,
по уровню 0,7, облучая ими взаимоперпендикулярно расположенные объемы 8 слоистой водной среды и участки дна 9 на линиях как курса, так и сноса судна-носителя,
- вертикально в водной среде 7 со скоростью С в виде узкого пучка с угловой шириной  по уровню 0,7, облучая им расположенные друг над другом объемы 8 слоистой водной среды и участок дна 9 под судном.
по уровню 0,7, облучая им расположенные друг над другом объемы 8 слоистой водной среды и участок дна 9 под судном.
При движении судна-носителя гидроакустической аппаратуры, излученные УЗ сигналы распространяются через слоистую структуру водной среды 7, содержащую отражающие объекты (газовые пузыри, водоросли, планктон), которые распределены в k слоях и движутся со скоростями  вместе с течениями в слоях. За счет отличий акустических сопротивлений совокупностей рассеивателей 8 в к слоях и водной среды 7 в указанных направлениях «нос», «корма», «лев. борт», «прав. борт» УЗ сигналы отражаются от движущихся с разными скоростями слоев водной структуры, претерпевая соответствующий доплеровский сдвиг частоты. Величины доплеровского сдвига частот могут дать информацию о параметрах движения судна-носителя - приближению или удалению рассеивателей, а также о значении скорости судна относительно рассеивающих объектов в каждом i-том рассеивающем горизонтальном слое.
вместе с течениями в слоях. За счет отличий акустических сопротивлений совокупностей рассеивателей 8 в к слоях и водной среды 7 в указанных направлениях «нос», «корма», «лев. борт», «прав. борт» УЗ сигналы отражаются от движущихся с разными скоростями слоев водной структуры, претерпевая соответствующий доплеровский сдвиг частоты. Величины доплеровского сдвига частот могут дать информацию о параметрах движения судна-носителя - приближению или удалению рассеивателей, а также о значении скорости судна относительно рассеивающих объектов в каждом i-том рассеивающем горизонтальном слое.
Регистрируют (блок ЭАП 5) и обрабатывают в приемных трактах аппаратуры судна-носителя эхосигналы, обусловленные акустическими контактами с подвижными и неподвижными рассеивателями, которые расположены как в объемах 8 водной среды, так и на участках дна 9, реализуя на ВРЧ доплеровский способ измерений (резонансные усилители 11, настроенные на частоту ВРЧ) и моностатический способ эхолотирования (резонансный усилитель 12, настроенный на частоту ВРЧ). В процессе измерений осуществляют вертикальную пространственную стратификацию совокупностей 8 рассеивателей водной среды 7 на 1, 2, …, i, …, k горизонтах глубин за счет стробирования эхосигналов объемной реверберации в приемных трактах, задавая одинаковые значения: ширины строба τi сл, исходного расположения относительно дна, скорости и последовательности перемещения строба для получения по ш горизонту глубин расчетных данных о величине скорости  течения. С этой целью преобразуют стробируемые эхосигналы объемной реверберации в электрические сигналы с частотами колебаний
течения. С этой целью преобразуют стробируемые эхосигналы объемной реверберации в электрические сигналы с частотами колебаний
где  - определяемые двойным эффектом Доплера величины частот ВРЧ
- определяемые двойным эффектом Доплера величины частот ВРЧ  которые несут информацию об акустических контактах с рассеивателями 8 i-того слоя водной среды, где i от 1 до k. Отметим, что эти соотношения справедливы при распространении ВРЧ соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости
которые несут информацию об акустических контактах с рассеивателями 8 i-того слоя водной среды, где i от 1 до k. Отметим, что эти соотношения справедливы при распространении ВРЧ соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости  относительно i-того слоя водной среды,
относительно i-того слоя водной среды,  - продольная компонента скорости судна относительно i-того слоя водной среды;
- продольная компонента скорости судна относительно i-того слоя водной среды;  - поперечная компонента скорости судна относительно i-того слоя водной среды; Θд - угол наклона акустических осей излучаемых пучков ВРЧ
- поперечная компонента скорости судна относительно i-того слоя водной среды; Θд - угол наклона акустических осей излучаемых пучков ВРЧ  относительно плоскости горизонта.
относительно плоскости горизонта.
В приемном тракте гидроакустической аппаратуры за счет первичной обработки (блоки 11, 15) электрических сигналов с доплеровскими частотами

где  - доплеровский сдвиг частот электрических сигналов с величинами частот ВРЧ
- доплеровский сдвиг частот электрических сигналов с величинами частот ВРЧ  для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости
для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости  относительно i-того слоя водной среды. Далее определяют за счет вторичной обработки (блок 16) полученных электрических сигналов величину путевой скорости
относительно i-того слоя водной среды. Далее определяют за счет вторичной обработки (блок 16) полученных электрических сигналов величину путевой скорости  движения судна-носителя, ее продольную
движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно i-того слоя водной среды, а также угол смещения
компоненты относительно i-того слоя водной среды, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна
направления вектора путевой скорости судна относительно диаметральной плоскости судна

где  - скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;

где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;


Аналогичным образом вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки (блоки 11, 15) электрические сигналы с доплеровскими частотами

где  - доплеровские сдвиги частот электрических сигналов ВРЧ
- доплеровские сдвиги частот электрических сигналов ВРЧ  для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости
для продольного и поперечного направлений движения - «нос - корма» и «лев. борт - прав. борт» - судна-носителя с компонентами путевой скорости  относительно дна и рассчитывают за счет вторичной обработки (блок 16) путевую скорость и движения судна-носителя, ее продольную
относительно дна и рассчитывают за счет вторичной обработки (блок 16) путевую скорость и движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно дна, а также угол смещения
компоненты относительно дна, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам:
направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам:

где  - скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;

где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
В блоке 16 рассчитывают за счет вторичной обработки величины значений векторов скоростей течения  в i-том слое как векторную сумму вектора путевой скорости судна-носителя относительно дна, измеренной на сигналах донной реверберации и вектора путевой скорости судна-носителя относительно i-того слоя, измеренного на сигналах объемной реверберации.
в i-том слое как векторную сумму вектора путевой скорости судна-носителя относительно дна, измеренной на сигналах донной реверберации и вектора путевой скорости судна-носителя относительно i-того слоя, измеренного на сигналах объемной реверберации.
В конечном итоге в АДПТ с режимом РПИ фиксируют результаты проведенных выше измерений и вычислений в виде объемных годографов скоростей течений в к слоях стратифицированного водного объема, глубину нахождения которых вычисляют за счет вертикального моностатического эхолотирования, результаты отображают, регистрируют и документируют результаты измерений в блоке 17.
Разработанный опытно-промышленный образец акустического доплеровского профилографа течений (АДПТ) для измерения скорости водного потока на различных глубинах имеет следующие технические характеристики:
1) Глубина измерений - 0,6-150 м.
2) Глубина водоема (в режиме абсолютного лага) - до 2000 м.
3) Разрешение по дальности - 0,5; 1; 2; 4; 8 м.
4) Погрешность измерения скорости потока относительная - 0,3%;
абсолютная - ±0,5 см/с.
5) Тип интерфейса - RS 232/422/Ethernet.
6) Количество измерительных акустических лучей - 4 наклонных, 1 вертикальный.
7) Требования к антенной системе и передающему тракту:
- несущая частота - 250÷300 кГц
- диапазон разностных (рабочих) частот - 20÷50 кГц
- ширина луча - 4°
- наклон лучей к вертикали - 30°
- излучаемая мощность одного тракта излучения - не более 500 Вт
- частота повторения импульсов - 1 Гц и ниже с дискретностью 0,1 Гц.
Антенный блок (фиг. 2) состоит из четырех двухчастотных антенн, расположенных под углами в 30 градусов относительно горизонта с углом разворота между собой в 90 град, и двухчастотной антенны, направленной вертикально в сторону дна «Эхолотный канал».
По каждому из 4-х наклонных лучей сформировано узконаправленное излучение на разностной частоте 30-60 кГц. Для приема эхосигналов на этой частоте около излучающих высокочастотных антенн накачки помещаются приемные антенны для приема рассеянных волн разностных частот. Из-за низкого затухания на этих частотах можно рассчитывать на получение сигналов от дна и от слоев среды на сравнительно больших глубинах. Сигналы разностной частоты используются и для измерения абсолютной скорости судна.
Акустический доплеровский профилограф течений предназначен для измерения скорости и направлений течений водных потоков на различных горизонтах, а также -непрерывных измерений абсолютной скорости судна.
Полученные результаты измерений должны способствовать повышению точности данных гидроакустических и сейсмоакустических средств исследования океанского дна, разведки минеральных ресурсов и инженерных изысканий. Прибор оснащен низкочастотным узко лучевым каналом (параметрический режим), позволяющим на глубоководных акваториях работать в режиме абсолютного лага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многочастотный доплеровский способ измерений скорости течений в водной среде | 2022 |
|
RU2795579C1 |
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| Корреляционный способ измерения параметров тонкой структуры водной среды | 2022 |
|
RU2799974C1 |
| МНОГОЧАСТОТНЫЙ КОРРЕЛЯЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ | 2022 |
|
RU2795577C1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| Акустический способ измерения параметров движения слоистой морской среды | 2022 |
|
RU2801053C1 |
| Акустический способ измерения параметров движения слоистой морской среды на прибрежной акватории | 2023 |
|
RU2833473C1 |
| Способ абсолютной градуировки излучающих и приемных электроакустических преобразователей антенного блока акустического доплеровского профилографа течений | 2023 |
|
RU2821706C1 |
| Способ градуировки обратимых электроакустических преобразователей антенн корреляционного измерителя скорости течений | 2023 |
|
RU2835804C1 |
| Способ измерения скорости подводных течений | 2022 |
|
RU2804343C1 |
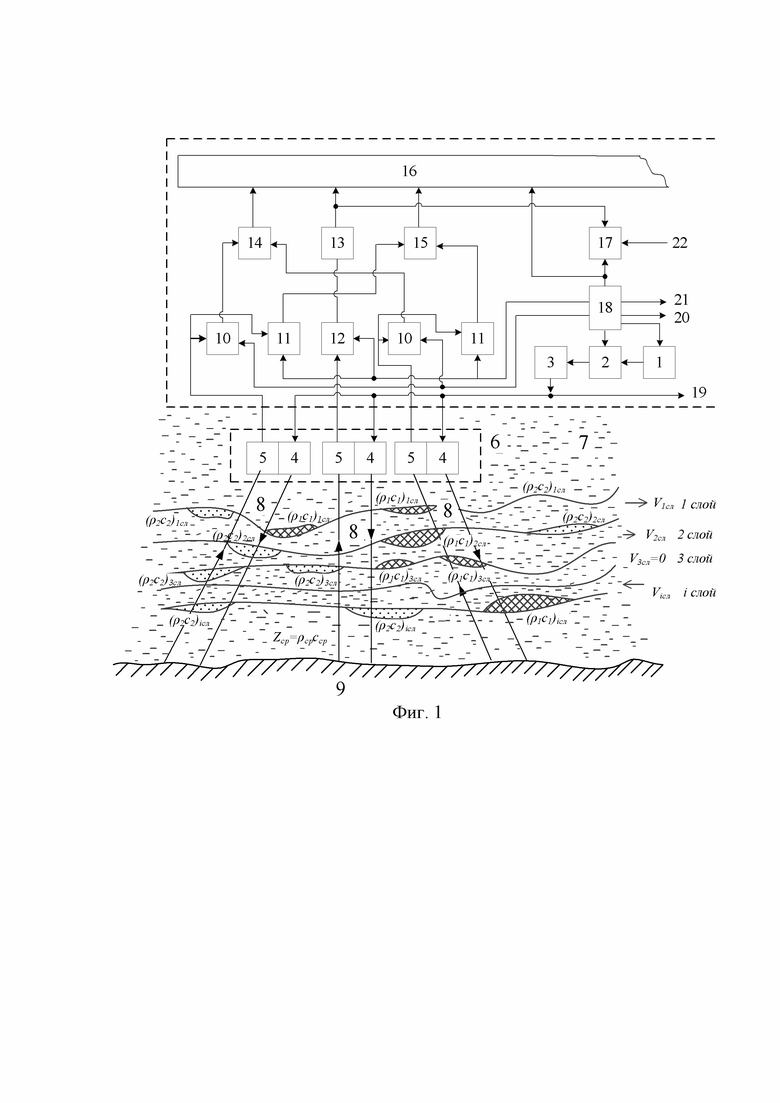
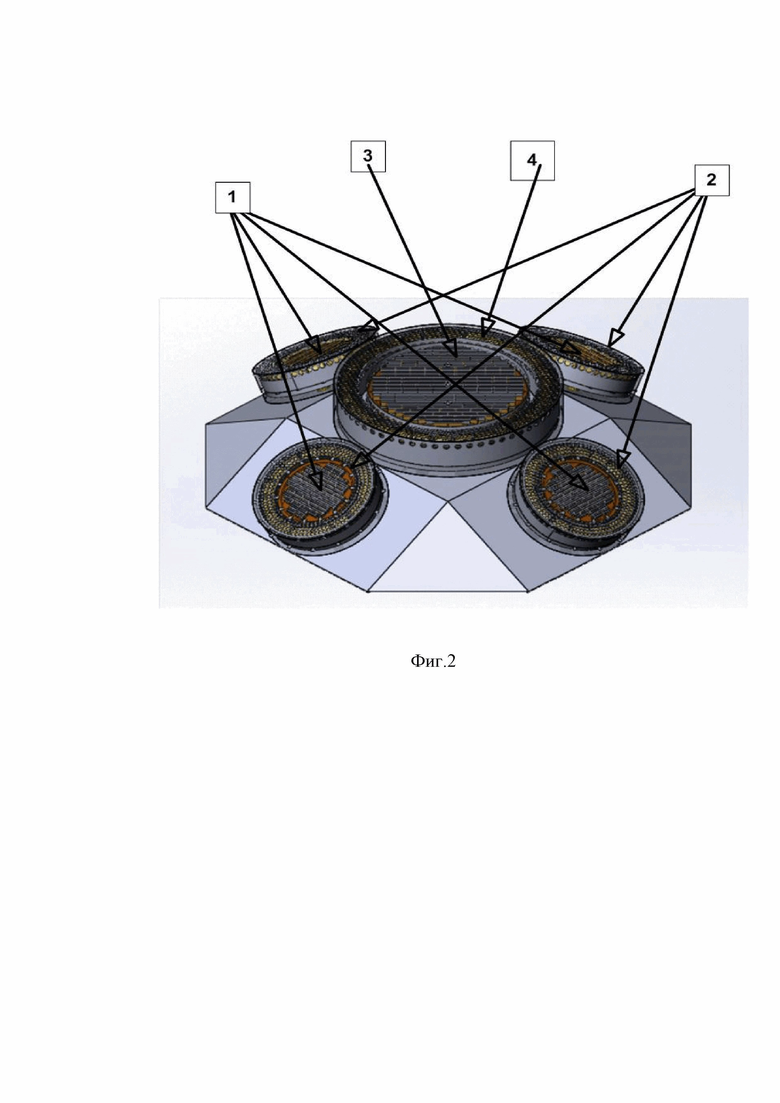
Использование: изобретение относится к акустическим способам активной локации, в основе функционирования которых лежит двойной эффект Доплера, в соответствии с которым происходит смещение частоты волн при отражении их от движущихся тел. Область использования – гидроакустика, океанология. Сущность: в излучающем тракте устройства, реализующем режимы как доплеровских измерений, так и моностатического эхолотирования, в соответствии с предлагаемым способом используются несколько параметрических излучающих антенн (ПИА), обеспечивающих формирование сигналов разностной частоты (CРЧ) с высокой направленностью в широкой полосе частот. В акустическом доплеровском способе профилирования скоростей течений в водной среде измерения осуществляют на нескольких рабочих сигналах разностной частоты, что позволяет выбирать необходимую скоростную чувствительность, увеличить точность определения скорости судна-носителя как относительно дна, так и относительно слоистой водной среды. Технический результат: сопоставление доплеровских сдвигов для различных глубин на рабочих сигналах между собой дает возможность дополнительно получать уточненные данные о распределении направлений и величин скоростей морских течений в звукорассеивающих слоях водной среды по глубине, т.е. исследовать в импульсном режиме тонкую структуру пространственно-временных характеристик поля скорости морских течений. 2 ил.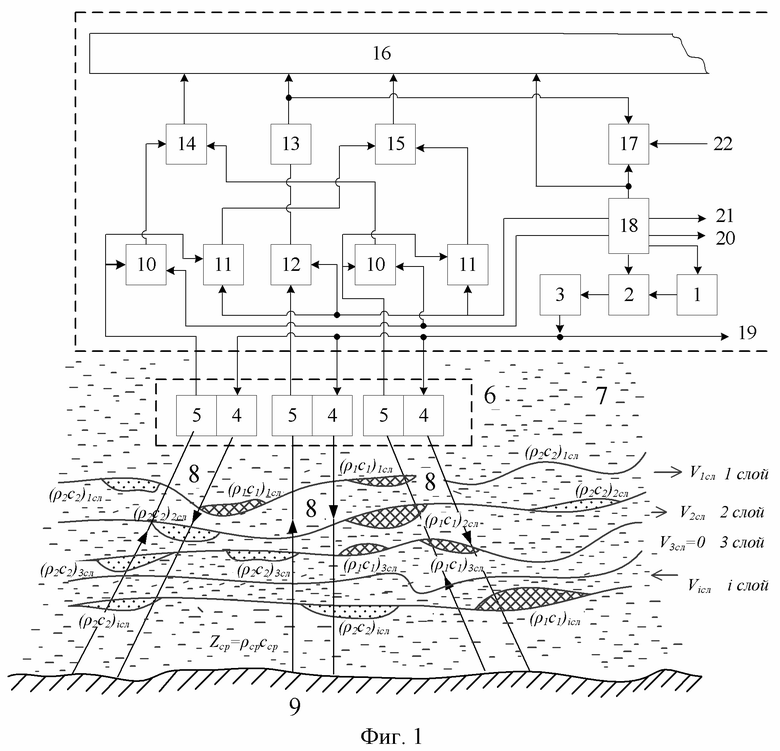
Акустический доплеровский способ профилирования течений в водной среде, характеризующийся тем, что:
1) устанавливают в днище судна-носителя гидроакустической аппаратуры электроакустические преобразователи (ЭАП), объединенные в антенный блок:
- восемь, из которых формируют четырехлучевую характеристику направленности (ХН) типа «Янус», - скомбинированы в пары «излучающий ЭАП-принимающий ЭАП», акустические оси апертур каждой из двух пар ЭАП находятся во взаимно перпендикулярных плоскостях судна-носителя: диаметральной (ось  ) и траверзной (ось
) и траверзной (ось  ), акустические оси в парах ЭАП параллельны, а для каждой из двух пар ЭАП - направлены относительно курса - вперед (нос) и назад (корма), а также влево (левый борт, л.б.) и вправо (правый борт, п.б.) - в четыре взаимно перпендикулярные области морского дна, реализуя доплеровский способ измерений в диаметральном и траверзном измерительных каналах гидроакустической аппаратуры, каждый ЭАП снабжен многоэлементным пьезоэлементом с полосой пропускания
), акустические оси в парах ЭАП параллельны, а для каждой из двух пар ЭАП - направлены относительно курса - вперед (нос) и назад (корма), а также влево (левый борт, л.б.) и вправо (правый борт, п.б.) - в четыре взаимно перпендикулярные области морского дна, реализуя доплеровский способ измерений в диаметральном и траверзном измерительных каналах гидроакустической аппаратуры, каждый ЭАП снабжен многоэлементным пьезоэлементом с полосой пропускания  и узлами экранировки, гидро-, электро- и шумоизоляции, соединен кабелем с аппаратурой;
и узлами экранировки, гидро-, электро- и шумоизоляции, соединен кабелем с аппаратурой;
2) обеспечивают за счет использования движителя перемещение судна-носителя с компонентой скорости  в диаметральной плоскости (ось ) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось ) с компонентой скорости
в диаметральной плоскости (ось ) по заданному курсу, сопровождающееся сносом с него вследствие воздействий водной и воздушной сред в траверзной плоскости (ось ) с компонентой скорости  , в результате чего относительно дна судно-носитель движется с путевой скоростью
, в результате чего относительно дна судно-носитель движется с путевой скоростью  ;
;
3) генерируют в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна-носителя непрерывный электрический сигнал с частотой  , находящийся в полосе пропускания многоэлементных пьезоэлементов, и синхронно подают его на многоэлементные пьезоэлементы излучающих ЭАП для обеих пар во взаимно перпендикулярных плоскостях - диаметральной (ось ) и траверзной (ось ) - судна-носителя;
, находящийся в полосе пропускания многоэлементных пьезоэлементов, и синхронно подают его на многоэлементные пьезоэлементы излучающих ЭАП для обеих пар во взаимно перпендикулярных плоскостях - диаметральной (ось ) и траверзной (ось ) - судна-носителя;
4) формируют ультразвуковые (УЗ) волны, распространяющиеся наклонно в водной среде со скоростью C в виде узких пучков с угловой шириной  по уровню 0,7, и осуществляют акустические контакты с подвижными и неподвижными рассеивателями во взаимоперпендикулярно расположенных как в объемах слоистой водной среды, так и участках дна соответственно, причем пучки находятся относительно судна-носителя: впереди (нос) и сзади (корма), а также слева (левый борт) и справа (правый борт);
по уровню 0,7, и осуществляют акустические контакты с подвижными и неподвижными рассеивателями во взаимоперпендикулярно расположенных как в объемах слоистой водной среды, так и участках дна соответственно, причем пучки находятся относительно судна-носителя: впереди (нос) и сзади (корма), а также слева (левый борт) и справа (правый борт);
5) регистрируют донные эхо-сигналы многоэлементными пьезоэлементами приемных ЭАП антенного блока с четырехлучевой ХН типа «Янус», которые попарно находятся во взаимно перпендикулярных диаметральной (ось ) и траверзной (ось ) плоскостях судна-носителя;
6) преобразуют регистрируемые эхо-сигналы в электрические сигналы с частотами колебаний
 ,
,
и  ,
,
 ,
,
и  ,
,
где  ,
,  ,
,  ,
,  - определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с рассеивателями, причем при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости и
- определяемые двойным эффектом Доплера величины частот УЗ волн, которые несут информацию об акустических контактах с рассеивателями, причем при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости и  относительно дна;
относительно дна;
- продольная компонента путевой скорости судна-носителя относительно дна;
- поперечная компонента путевой скорости судна-носителя относительно дна;
 - угол наклона акустических осей узких УЗ пучков относительно плоскости горизонта,
- угол наклона акустических осей узких УЗ пучков относительно плоскости горизонта,
и передают их в приемный тракт гидроакустической аппаратуры;
7) вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки электрические сигналы с доплеровскими частотами
 и
и
 ,
,
где  и
и  - доплеровские сдвиги частот электрических сигналов УЗ волны с частотой для продольного и поперечного направлений движения - «нос – корма» и «лев.борт – прав.борт» - судна-носителя с компонентами путевой скорости и
- доплеровские сдвиги частот электрических сигналов УЗ волны с частотой для продольного и поперечного направлений движения - «нос – корма» и «лев.борт – прав.борт» - судна-носителя с компонентами путевой скорости и  относительно дна, и рассчитывают за счет вторичной обработки путевую скорость
относительно дна, и рассчитывают за счет вторичной обработки путевую скорость  движения судна-носителя, ее продольную
движения судна-носителя, ее продольную  и поперечную компоненты относительно дна, а также угол смещения
и поперечную компоненты относительно дна, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам
направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам
 ,
,
где  – скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
– скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
 ,
,
где – скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;


отличающийся тем, что
8) устанавливают в антенный блок дополнительный ЭАП, который выполнен обратимым, реализуя схему моностатического эхолотирования, и расположен как в фазовом центре четырех пар ЭАП, используемых в доплеровском способе измерений, так и в горизонтальной плоскости ( ) относительно судна-носителя, акустическая ось ЭАП совпадает с осью (
) относительно судна-носителя, акустическая ось ЭАП совпадает с осью ( ) перпендикулярной горизонтальной плоскости, дополнительный обратимый ЭАП снабжен многоэлементным пьезоэлементом с полосой пропускания и узлами экранировки, гидро-, электро- и шумоизоляции, соединен кабелем с аппаратурой;
) перпендикулярной горизонтальной плоскости, дополнительный обратимый ЭАП снабжен многоэлементным пьезоэлементом с полосой пропускания и узлами экранировки, гидро-, электро- и шумоизоляции, соединен кабелем с аппаратурой;
9) регистрируют отсутствие акустического контакта с донными рассеивателями, что осуществлялось посредством приемных ЭАП антенного блока с четырехлучевой ХН типа «Янус», при выходе судна-носителя гидроакустической аппаратуры на участок глубокой водной среды;
10) генерируют дополнительно в излучающем тракте гидроакустической аппаратуры движущегося относительно дна судна-носителя непрерывный гармонический сигнал с частотой  , находящийся в полосе пропускания многоэлементных пьезоэлементов ЭАП антенного блока, реализующего как доплеровский способ измерений, так и дополнительный - моностатический способ эхолотирования;
, находящийся в полосе пропускания многоэлементных пьезоэлементов ЭАП антенного блока, реализующего как доплеровский способ измерений, так и дополнительный - моностатический способ эхолотирования;
11) преобразуют в излучающем тракте гидроакустической аппаратуры колебания непрерывных электрических сигналов с частотами  в кратковременные амплитудно-импульсные модулированные радиоимпульсы прямоугольной формы и усиливают по мощности полученные радиоимпульсы прямоугольной формы с несущими частотами
в кратковременные амплитудно-импульсные модулированные радиоимпульсы прямоугольной формы и усиливают по мощности полученные радиоимпульсы прямоугольной формы с несущими частотами  , синхронно подавая их на многоэлементные пьезоэлементы излучающих ЭАП антенного блока;
, синхронно подавая их на многоэлементные пьезоэлементы излучающих ЭАП антенного блока;
12) формируют за счет нелинейного эффекта взаимодействия в водной среде пять параметрических излучающих антенн (ПИА), в объемах которых распределены нелинейные источники спектральных компонент комбинационных частот, и генерируют импульсные УЗ волны с разностной частотой (ВРЧ)  , распространяющиеся для акустического контактирования с подвижными и неподвижными рассеивателями:
, распространяющиеся для акустического контактирования с подвижными и неподвижными рассеивателями:
- наклонно в водной среде со скоростью  в виде четырех узких пучков с угловой шириной
в виде четырех узких пучков с угловой шириной  по уровню 0,7, облучая ими взаимоперпендикулярно расположенные объемы слоистой водной среды и участки дна на линиях как курса, так и сноса судна-носителя,
по уровню 0,7, облучая ими взаимоперпендикулярно расположенные объемы слоистой водной среды и участки дна на линиях как курса, так и сноса судна-носителя,
- вертикально в водной среде со скоростью в виде узкого пучка с угловой шириной по уровню 0,7, облучая им расположенные друг над другом объемы слоистой водной среды и участок дна под судном;
13) регистрируют и обрабатывают в приемных трактах аппаратуры судна-носителя эхо-сигналы, обусловленные акустическими контактами с подвижными и неподвижными рассеивателями, которые расположены как в объемах водной среды, так и на участках дна в соответствии с шагом 12, реализуя на ВРЧ доплеровский способ измерений и моностатический способ эхолотирования;
14) осуществляют вертикальную пространственную стратификацию совокупностей рассеивателей водной среды на 1, 2,…, , ..,
, .., горизонтах глубин за счет стробирования эхо-сигналов объемной реверберации в приемных трактах, задавая одинаковые значения:
горизонтах глубин за счет стробирования эхо-сигналов объемной реверберации в приемных трактах, задавая одинаковые значения:
ширины строба  ,
,
исходного расположения относительно дна,
скорости и последовательности перемещения строба
для получения по  горизонту глубин расчетных данных о величине скорости
горизонту глубин расчетных данных о величине скорости  течения;
течения;
15) преобразуют стробируемые эхо-сигналы объемной реверберации в электрические сигналы с частотами колебаний




где  ,
,  ,
,  ,
,  - определяемые двойным эффектом Доплера величины частот ВРЧ , которые несут информацию о акустических контактах с рассеивателями i-го слоя водной среды, где i от 1 до k, причем при распространении ВРЧ соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости
- определяемые двойным эффектом Доплера величины частот ВРЧ , которые несут информацию о акустических контактах с рассеивателями i-го слоя водной среды, где i от 1 до k, причем при распространении ВРЧ соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости 
 относительно i-го слоя водной среды,
относительно i-го слоя водной среды,
 - продольная компонента скорости судна относительно i-го слоя водной среды;
- продольная компонента скорости судна относительно i-го слоя водной среды;
 - поперечная компонента скорости судна относительно i-го слоя водной среды;
- поперечная компонента скорости судна относительно i-го слоя водной среды;
- угол наклона акустических осей излучаемых пучков ВРЧ относительно плоскости горизонта,
и передают их в приемный тракт гидроакустической аппаратуры;
16) преобразуют принятые эхо-сигналы донной реверберации в электрические сигналы с частотами колебаний
 ,
,
и  ,
,
 ,
,
и  ,
,
где  ,
,  ,
,  ,
,  - определяемые двойным эффектом Доплера величины частот ВРЧ, которые несут информацию об акустических контактах с донными рассеивателями, причем при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости и относительно дна;
- определяемые двойным эффектом Доплера величины частот ВРЧ, которые несут информацию об акустических контактах с донными рассеивателями, причем при их распространении соответственно как вперед и назад по курсу судна-носителя, так и в стороны левого и правого бортов поперек курса движения судна-носителя, движущегося с компонентами скорости и относительно дна;
- продольная компонента путевой скорости судна-носителя относительно дна;
- поперечная компонента путевой скорости судна-носителя относительно дна;
- угол наклона акустических осей излучаемых пучков ВРЧ относительно плоскости горизонта и передают их в приемный тракт гидроакустической аппаратуры;
17) вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки электрические сигналы с доплеровскими частотами
 ,
,  ,
,
где  и
и  - доплеровский сдвиг частот электрических сигналов с величинами частот ВРЧ для продольного и поперечного направлений движения - «нос – корма» и «лев.борт – прав.борт» - судна-носителя с компонентами путевой скорости
- доплеровский сдвиг частот электрических сигналов с величинами частот ВРЧ для продольного и поперечного направлений движения - «нос – корма» и «лев.борт – прав.борт» - судна-носителя с компонентами путевой скорости  и
и  относительно i-го слоя водной среды, и определяют за счет вторичной обработки полученных электрических сигналов величину путевой скорости
относительно i-го слоя водной среды, и определяют за счет вторичной обработки полученных электрических сигналов величину путевой скорости  движения судна-носителя, ее продольную
движения судна-носителя, ее продольную  и поперечную
и поперечную  компоненты относительно i-го слоя водной среды, а также угол смещения
компоненты относительно i-го слоя водной среды, а также угол смещения  направления вектора путевой скорости судна относительно диаметральной плоскости судна
направления вектора путевой скорости судна относительно диаметральной плоскости судна
 ,
,
где  – скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
– скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
 ,
,
где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;

 ;
;
18) вырабатывают в приемном тракте гидроакустической аппаратуры за счет первичной обработки электрические сигналы с доплеровскими частотами
 и
и
 ,
,
где  и
и  - доплеровские сдвиги частот электрических сигналов ВРЧ для продольного и поперечного направлений движения - «нос – корма» и «лев.борт – прав.борт» - судна-носителя с компонентами путевой скорости
- доплеровские сдвиги частот электрических сигналов ВРЧ для продольного и поперечного направлений движения - «нос – корма» и «лев.борт – прав.борт» - судна-носителя с компонентами путевой скорости  и относительно дна, и рассчитывают за счет вторичной обработки путевую скорость движения судна-носителя, ее продольную и поперечную компоненты относительно дна, а также угол смещения направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам
и относительно дна, и рассчитывают за счет вторичной обработки путевую скорость движения судна-носителя, ее продольную и поперечную компоненты относительно дна, а также угол смещения направления вектора путевой скорости судна относительно диаметральной плоскости судна по формулам
 ,
,
где  - скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для диаметральной плоскости судна-носителя;
 ,
,
где  - скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;
- скоростная чувствительность гидроакустической аппаратуры для траверзной плоскости судна-носителя;

 ;
;
19) рассчитывают за счет вторичной обработки величины значений векторов скоростей течения  в i-м слое как векторную сумму вектора путевой скорости судна-носителя относительно дна, измеренной на сигналах донной реверберации, и вектора путевой скорости судна-носителя относительно i-го слоя, измеренной на сигналах объемной реверберации, с учетом данных, полученных в соответствии с пунктом 7) формулы;
в i-м слое как векторную сумму вектора путевой скорости судна-носителя относительно дна, измеренной на сигналах донной реверберации, и вектора путевой скорости судна-носителя относительно i-го слоя, измеренной на сигналах объемной реверберации, с учетом данных, полученных в соответствии с пунктом 7) формулы;
20) фиксируют результаты проведенных выше измерений и вычислений в виде объемных годографов скоростей течений в k слоях стратифицированного водного объема, глубину нахождения которых вычисляют за счет вертикального моностатического эхолотирования;
21) выбирают из полученного семейства ( -1) объемных годографов скоростей течений в k слоях стратифицированного водного объема данные, соответствующие заданной точности измерений;
-1) объемных годографов скоростей течений в k слоях стратифицированного водного объема данные, соответствующие заданной точности измерений;
22) отображают, регистрируют и документируют результаты измерений в аппаратуре.
| АКУСТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ ТЕЧЕНИЙ | 2019 |
|
RU2710527C1 |
| Способ образования вихревой воронки в верхнем бьефе гидротехнических сооружений | 1947 |
|
SU75062A1 |
| US 11119211 B2, 14.09.2021 | |||
| US 11846704 B2, 19.12.2023 | |||
| А.Н | |||
| Морозов и др | |||
| АКУСТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ПРОФИЛОМЕТР ТЕЧЕНИЙ КАК ЭЛЕМЕНТ КОМПЛЕКСНОЙ СИСТЕМЫ ОПЕРАТИВНОГО КОНТРОЛЯ СОСТОЯНИЯ ВОДНОЙ СРЕДЫ В ПРИБРЕЖНОЙ ЗОНЕ МОРЯ, журнал "Экологическая безопасность прибрежной и шельфовой зон моря", номер | |||

