Изобретение относится к области гидроакустики, в частности, к способам измерениям скорости подводных течений с использованием ультразвуковых волн. Функционирование способа измерения скорости подводных течений основано на том, что лучевая скорость УЗ волны в движущейся среде равна векторной сумме фазовой скорости звука в неподвижной среде и скорости движения самой среды. Вследствие этого, при распространении в направлении потока жидкости УЗ волна будет иметь лучевую скорость (c+υ×cosα), а при распространении против потока - (c-υ×cosα), где с - скорость УЗ в неподвижной жидкости, υ - скорость потока, α - угол между направлениями распространения УЗ волны и потока.
Уровень техники
Из уровня техники известен способ измерения параметров течений, основанный на измерении давления, оказываемого потоком воды на находящуюся в ней гидрометрическую вертушку, принцип действия которой основан на создании набегающим потоком воды на ее лопастях гидродинамического момента, приводящего к их вращению (см. Коровин В.П., Тимец В.М. Методы и средства гидрометеорологических измерений. Глава 8. Примеры и методы наблюдений за течениями. С. 127-147. - Санкт-Петербург: Гидрометеоиздат, 2000. - 311 с.), заключающийся в том, что:
1) устанавливают в заданном месте измерений на акватории неподвижное плавательное средство;
2) помещают на заданную глубину в движущийся слой водного объема посредством конструкционного элемента - вертикальной штанги -гидрометрической вертушки, лопасти которой закреплены на валу, опертом на подшипники, принцип действия вертушки основан на создании набегающим потоком воды на лопастях гидродинамического момента, т.е. к их вращению;
3) осуществляют в течении заданного времени эксперимента измерение общего числа оборотов лопастей гидрометрической вертушки, включив одновременно счетчик оборотов и секундомер,
4) определяют величину скорости течения в заданной точке измерительного объема по тарировочной кривой, которая прилагается к паспорту гидрометрической вертушки, связывая уравнением

величины скорости υ течения водной среды с числом оборотов n лопастей в единицу времени, где  - параметры, определяемые заранее экспериментально для гидрометрической вертушки тарированием;
- параметры, определяемые заранее экспериментально для гидрометрической вертушки тарированием;
5) производят измерения других значений скорости течений в следующих по глубине измерительных водных объемах в соответствии с пунктами 2-4;
6) производят расчет средней скорости для заданной вертикали глубин графомеханическим способом на основе полученных данных за счет построения эпюры скоростей и усреднения по площади эпюры.
7) регистрируют и документируют результаты измерений в аппаратуре.
Данный способ имеет недостатки и ограничения в применении, связанные с малой точностью косвенного измерения скорости движения. Так, точность измерений скорости течений зависит от плотности среды, условий обтекания, структуры и флуктуаций течения, т.е. данная зависимость нелинейна, и количественно может быть оценена только при рассмотрении малых отклонений от установившегося состояния. Диапазон измерений скоростей течений датчиками вертушечного типа лежит в пределах 0,005-3 м/с. Погрешность измерений механическими вертушками определяется в основном качеством исполнения и в лучших образцах не превышает 5%. При малых скоростях течений показания вертушек неустойчивы,
ввиду чего погрешности измерений в этом пределе могут быть
значительными (>10%), поскольку на показания вертушек существенно влияют износ подшипников, попадание твердых частиц в механизме прибора и т.п. При измерении датчиками вертушечного типа сложной картины течений, возникающей из-за воздействия ветровых и внутренних волн, вихревых течений и турбулентности на стационарный поток, возникает значительная погрешность. Кроме того, методика измерений течений с борта судна не позволяет фиксировать прибор в определенной точке пространства. Перемещения прибора на тросе с несущим буем и с судном датчик регистрирует как изменение скорости. Это приводит к появлению погрешностей, особенно проявляющихся при нахождении прибора
в слое воды, в котором сказывается влияние ветрового волнения.
Известен одноканальный способ измерения скорости потока жидкости, основанный на измерении величины сноса УЗ пучка потоком жидкой среды (см. Кремлевский П.П. Расходомеры и счетчики количества: Справочник. Глава 22. Акустические расходомеры. §22.10 Ультразвуковые расходомеры с колебаниями, перпендикулярными к движению потока, С. 463-465. - Л.: Машиностроение, Ленинград. Отд-ние, изд 4-ое, перераб. и доп., 1989. - 701 с.), заключающийся в том, что:
- устанавливают посредством линейного конструкционного элемента поперек потока жидкости на расстоянии акустической базы l три электроакустических преобразователя (ЭАП), один из которых - излучающий- с одной стороны потока, а два - приемных - на противоположной;
- формируют измерительный объем так, что акустические оси ЭАП параллельны как выбранной ориентации акустической базы, так и друг другу, причем, акустическая ось излучающего ЭАП находится между акустическими осями двух приемных ЭАП;
- применяют пьезоэлектрические ЭАП, которые идентичны как по конструкции, так и по пространственным характеристикам излучаемых УЗ полей, причем, так, что при отсутствии движения жидкой среды обеспечено одинаковое УЗ облучение апертур приемных ЭАП;
- вырабатывают в излучающем тракте импульсный электрический сигнал с частотой ƒ, поступающий на пьезоэлемент излучающего ЭАП;
- излучают УЗ импульс в движущуюся со скоростью υ жидкую среду поперек направления движения ее потока, что приводит к его смещению по потоку относительно заданного направления;
- принимают обоими приемными ЭАП, прошедший через движущуюся со скоростью υ жидкую среду УЗ импульс, причем, за счет его смещения по потоку электрические сигналы с их пьезоэлементов имеют различную амплитуду;
- подают электрические сигналы с различной амплитудой на два входа дифференциального усилителя, выходной электрический сигнал которого пропорционален разности амплитуд входных электрических сигналов, и, следовательно, скорости υ потока среды в измерительном объеме;
- регистрируют и документируют результаты измерений в аппаратуре.
Данный способ имеет недостатки и ограничения в применении, связанные с малой точностью косвенного измерения скорости потока. Погрешность измерений скорости потока достигает 2-5%, основной источник погрешности - вариации скорости (с) ультразвука на контролируемом участке потока из-за изменения температуры или состава жидкости. В данном способе не предусмотрен дополнительный канал для измерения скорости (с) ультразвука на контролируемом участке потока, отсутствует возможность изменения направления УЗ облучения движущейся со скоростью υ жидкой среды, что снижает точность и надежность способа.
Наиболее близким к заявляемому изобретению является способ измерения скорости υ потока жидкости в измерительном объеме, например, в канале с потоком воды (см. Ультразвук. Маленькая энциклопедия. Глав. ред. И.П. Голямина. Расходомер ультразвуковой, с. 300 - М.: Советская энциклопедия, 1979. - 400 с), заключающийся в том, что:
- устанавливают оппозитно на заданном горизонте движущейся жидкости электроакустические преобразователи (ЭАП) на расстоянии акустической базы l друг от друга посредством использования линейного конструкционного элемента;
- формируют измерительный объем для определения скорости υ движения жидкой среды так, что акустические оси ЭАП пространственно совпадают с выбранной ориентацией в пространстве оси акустической базы в нем, но направлены встречно;
- применяют обратимые пьезоэлектрические ЭАП, идентичные как по конструкции, так и по пространственными характеристиками УЗ полей;
- вырабатывают в излучающем тракте аппаратуры импульсные электрические сигналы с частотой заполнения ƒ и поочередно подают их на пьезоэлементы оппозитно расположенных ЭАП;
- излучают в измерительный объем поочередно УЗ импульсы, распространяющиеся со скоростью С, - как попутно, так и навстречу движению потока жидкой среды со скоростью υ, причем, направления векторов данных скоростей могут образовывать величины в диапазонах как острых α, так и тупых углов (180°-α) соответственно;
- измеряют в приемном тракте аппаратуры поочередно два значения времени распространения УЗ импульсов в движущейся жидкой среде - по направлению ее движения, а также навстречу - вдоль акустической базы и величину их разности;
- рассчитывают в блоке обработки результатов измерений скорость движения υ жидкой среды в пределах измерительного объема;
- отображают, регистрируют и документируют результаты измерений в аппаратуре.
Данный способ имеет недостатки и ограничения в применении, связанные с малой точностью косвенного измерения скорости потока. Погрешность измерений скорости υ потока достигает 2-5%, основной источник погрешности - вариации скорости С ультразвука на контролируемом участке потока из-за изменения температуры или состава жидкости. В зависимости от способа измерения разности времен выбирают соответствующий тип измерительной схемы - разностно-фазовые, разностно-временные и частотно-разностные. Например, для разностно-фазовой реализации измерительной схемы известно соотношение, связывающее частоту ƒ излучаемых УЗ колебаний и длину l акустической базы - ƒ×l<c2/υ. Из этого следует, что при коротких базах l возможно применение высоких частот ƒ и , наоборот, при длинных базах l рабочая частота ƒ ультразвука должна быть низкой. В соответствии с этим соотношением относительная погрешность измерения скорости υ из-за непостоянства скорости (С) звука в море, погрешностей измерения частоты и акустической базы равна (Δυ/υ)=2(Δc/c)+(Δƒ/ƒ)+(Δl/l), причем, только первое слагаемое обусловит величину до 5-7%. В данном способе также не предусмотрен дополнительный канал для измерения скорости С ультразвука на контролируемом участке потока, отсутствует возможность изменения направления УЗ облучения в измерительном объеме движущейся со скоростью υ жидкой среды, что может быть актуально для определения параметров течения водной среды, в которой заранее неизвестно направление движения потока.
Задачей изобретения является уменьшение результирующей погрешности гидроакустической контрольно-измерительной аппаратуры, в частности, средств обеспечения океанографических исследований (см. Справочник по гидроакустике. Под ред. А.Е. Колесникова. Л.: Судостроение, 1982, стр. 5-6).
Задача решается косвенным определением значения скорости С распространения звука непосредственно в «разноглубинных» измерительных объемах водной среды, обладающих изменчивой структурой поля скорости υ морских течений.
Техническим результатом изобретения является повышение точности измерения скорости течения в измерительном объеме водной среды.
Технический результат достигается тем, что в способ измерения скорости υ потока жидкости в измерительном объеме, заключающийся в том, что:
- устанавливают оппозитно на заданном горизонте движущейся жидкости электроакустические преобразователи (ЭАП) на расстоянии акустической базы l друг от друга посредством использования линейного конструкционного элемента;
- формируют измерительный объем для определения скорости υ движения жидкой среды так, что акустические оси ЭАП пространственно совпадают с выбранной ориентацией в пространстве оси акустической базы в нем, но направлены встречно;
- применяют обратимые пьезоэлектрические ЭАП идентичные как по конструкции, так и по пространственными характеристикам УЗ полей;
- вырабатывают в излучающем тракте аппаратуры импульсные электрические сигналы с частотой заполнения ƒ и поочередно подают их на пьезоэлементы оппозитно расположенных ЭАП;
- излучают в измерительный объем поочередно УЗ импульсы, распространяющиеся со скоростью С, как попутно, так и навстречу движению потока жидкой среды со скоростью υ, причем, направления векторов данных скоростей могут образовывать величины в диапазонах как острых α, так и тупых углов (180°-α) соответственно;
- измеряют в приемном тракте аппаратуры два значения времени распространения УЗ импульсов в движущейся жидкой среде - по направлению ее движения, а также навстречу - вдоль акустической базы и величину их разности;
- рассчитывают в блоке обработки результатов измерений скорость движения υ жидкой среды в пределах измерительного объема;
дополнительно введены следующие операции:
- выполняют конструкционной элемент в виде кольца диаметром l, равным акустической базе l измерительного объема;
- устанавливают оппозитно на внешней поверхности кольцевого конструкционного элемента m обратимых ЭАП;
- формируют m измерительных объемов, оси которых проходят через центр кольца, лежат в его плоскости и совпадают со встречно направленными акустическими осями оппозитно расположенных ЭАП, образуя в пространстве 1, 2, …i, …m возможных вариантов ориентации оси используемого измерительного объема относительно направления движения потока жидкости, имеющего скорость υ;
- проводят последовательно излучение УЗ-импульсов по направлению и навстречу движению потока жидкой среды и соответствующие измерения времени распространения УЗ импульсов в жидкой среде для каждого из (m) измерительных объемов водной среды путем коммутации в заданном порядке трактов излучения, приема и обработки аппаратуры до обнаружения i-того измерительного объема, в котором измеряемая разность времен прохождения УЗ импульсами акустической базы между оппозитными ЭАП - по направлению, а также навстречу движению водной среды - будет минимальной Δtпопер;
- используют наиболее точные данные, полученные для (i-1)-го измерительного объема на частотах ƒ1, ƒ2=аƒ1…ƒ3=вƒ1, в частности, величину времени прохождения t1попер УЗ импульсами по направлению, для вычисления величины угла α1 и, соответственно, cosα1 из геометрических параметров кольцевого конструкционного элемента;
- определяют соотношение для скорости С распространения УЗ волны с частотами ƒ1 , ƒ2=аƒ1…ƒ3=вƒ1 в пространстве измерительного объема;
- выбирают для осуществления измерений на частотах ƒ1, ƒ2=аƒ1…ƒ3=вƒ1 еще один из m измерительных объемов, причем, тот у которого ось сдвинута относительно оси i-того измерительного канала на 90°;
- проводят последовательно излучение УЗ-импульсов по направлению и навстречу движению потока жидкой среды и соответствующие измерения времени распространения УЗ импульсов в жидкой среде для данного измерительного объема водной среды путем коммутации в заданном порядке трактов излучения, приема и обработки аппаратуры, причем, в выбранном канале разность времен Δtпрод продольного прохождения УЗ импульсами акустической базы между ЭАП - по направлению, а также навстречу движению водной среды - будет максимальной Δtпрод ;
- вычисляют значение скорости υ движения жидкой среды в пространстве измерительного объема на заданном горизонте движущейся жидкости.
- осуществляют измерения других значений скорости течений в следующих по глубине измерительных водных объемах;
- регистрируют и документируют результаты измерений в аппаратуре.
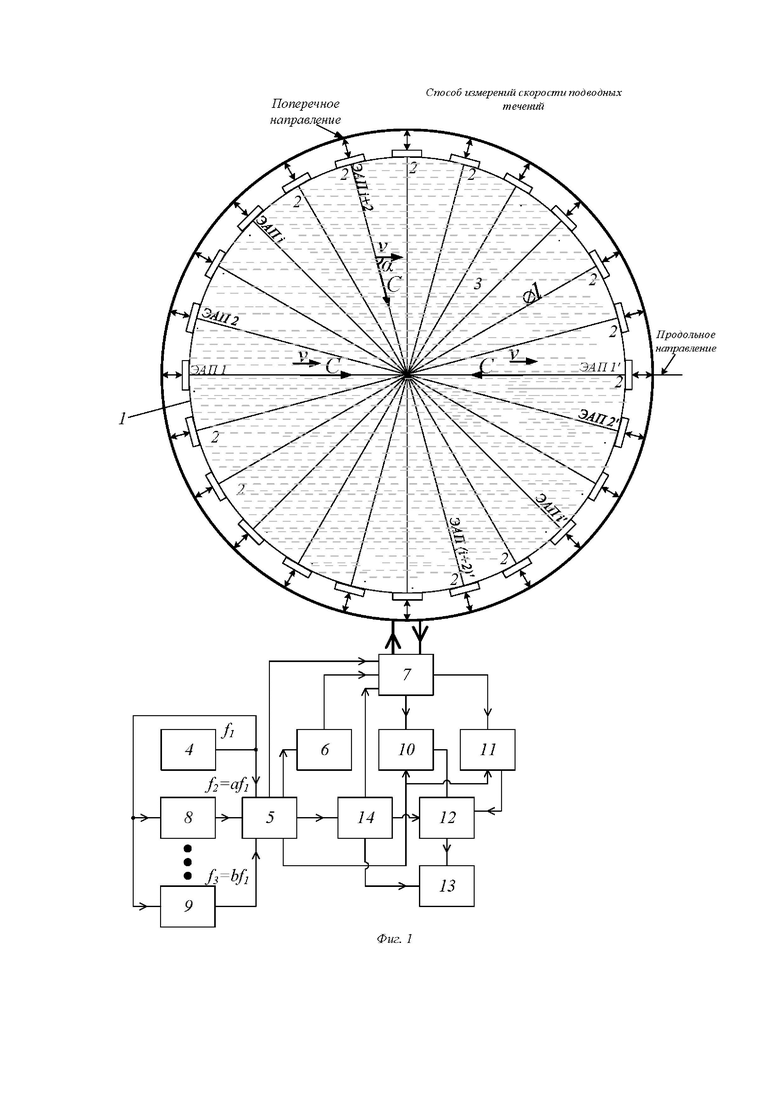
На фиг. 1 показан кольцевой конструкционный элемент 1 диаметром l (акустическая база измерительного объема с движущейся жидкостью 3) с установленными оппозитно ЭАП 2 и с отмеченными продольным (ЭАП1-ЭАП1') и поперечным (ЭАП(i+2)-ЭАП(i+2)') направлениями для измерений, а также структурная схема трактов излучения, приема и обработки аппаратуры. Измерительная аппаратура включает следующие блоки: 4 - генератор, 5 - хронизатор-модулятор, 6 - усилитель мощности, 7 - многоканальный управляемый коммутатор, 8, 9 - умножители частоты в a, …, b раз, 10 - канал поперечного направления, 11 - канал продольного направления, 12 - блок обработки, 13 - блок отображения, регистрации и документирования результатов, 14 - блок управления.
Способ реализуется следующим образом. Электроакустические преобразователи 2 располагаются на кольцевом конструкционном элементе 1(фиг. 1), попарно и оппозитно образуя (m) измерительных объемов для измерений, например, (ЭАП1-ЭАП1') и (ЭАП(i+2) -ЭАП(i+2)') с продольным и поперечным направлениями прохождения УЗ импульсами акустической базы относительно направления движения потока жидкости 3 (на фиг. 1 выделена штриховкой) со скоростью υ. Оси (m) измерительных объемов сдвинуты друг относительно друга на некоторый угол, что дает возможность за счет коммутирования соответствующих пар ЭАП 2 изменять направление вектора С фазовой скорости УЗ в жидкой среде 3 относительно заранее неизвестного направления и величины вектора υ скорости течения. Стрелками <--> обозначены вход/выход ЭАП2, что позволяет через многоканальный управляемый коммутатор 7 подавать/снимать электрические сигналы с пьезоэлементов ЭАП2.
Обратимые пьезоэлектрические ЭАП конструктивно идентичны, формируют аналогичные пространственные УЗ поля, каждый из них снабжен полуволновым стержневым пьезоэлементом толщиной h с основной (низшей) частотой резонанса ƒ=ncE/2h, где n=1 - номер нормального колебания, cE- скорость продольных волн в пьезоэлементе. Следует учесть, что стержневой пьезоэлемент является сплошной колебательной системой, в которых нормальные колебания представляют собой стоячие волны, собственные частоты которых образуют бесконечную дискретную последовательность (при нечетных n=1, 3, 5…) (см. Ультразвук. Маленькая энциклопедия. Глав. ред. И.П. Голямина. Нормальные колебания, С.237-238. - М.: Советская энциклопедия, 1979. - 400 с). Каждый ЭАП снабжен обтекателем с жидким электроизолирующим диэлектриком внутри, для которых -  , c1 - толщина диэлектрического зазора через который проходит УЗ волна и скорость УЗ в нем соответственно, - b2/2, c2 - толщина корпуса обтекателя через который также проходит УЗ волна и скорость УЗ в материале обтекателя соответственно.
, c1 - толщина диэлектрического зазора через который проходит УЗ волна и скорость УЗ в нем соответственно, - b2/2, c2 - толщина корпуса обтекателя через который также проходит УЗ волна и скорость УЗ в материале обтекателя соответственно.
Для осуществления технического результата изобретения - повышения точности измерения скорости течения в измерительном объеме водной среды, излучающий тракт аппаратуры имеет следующие особенности. Генератор 4 вырабатывает непрерывный электрический сигнал с частотой ƒ1, который подается через умножители частоты 8, 9 в a, …, b раз (нечетные числа) , а также непосредственно, на соответствующие входы хронизатора-модулятора 5, который соединен и управляется сигналом с первого выхода блока управления 14. Это позволяет увеличивать частоту электрического сигнала в заданное число раз - ƒ2=аƒ1…ƒ3=вƒ1, а также формировать импульсы требуемой длительности с заданным гармоническим заполнением, которые подаются на вход усилителя мощности 6. Вследствие этого излучающий тракт аппаратуры получает возможность генерировать выходной импульсный электрический сигнал требуемой длительности с различной частотой заполнения ƒ1, ƒ2=аƒ1…ƒ3=вƒ1. Данный электрический сигнал поступает на пьезоэлемент необходимого ЭАП2 через многоканальный управляемый коммутатор 7, снабженный двумя входами - от хронизатора-модулятора 5 и блока управления 14, вызывая резонансные колебания по толщине на одной из требуемых собственных частот.
Исходя из того, что при установке на заданном горизонте кольцевого конструкционного элемента заранее неизвестно направление движения потока, осуществляют последовательное выполнение излучения УЗ импульсов для каждого из (m) измерительных объемов в движущейся водной среде за счет коммутации в заданном порядке трактов излучения, приема и обработки аппаратуры. Таким образом, излучают поочередно в измерительные объемы УЗ импульсы, распространяющиеся со скоростью С,- как попутно, так и навстречу движению потока жидкой среды со скоростью υ. Причем, направления векторов данных скоростей могут образовывать величины в диапазонах как острых α, так и тупых углов (180°-α) соответственно, а также измеряют в приемном тракте аппаратуры в каждом случае по два значения времени распространения УЗ импульсов в движущейся жидкой среде - по направлению ее движения, а также навстречу - вдоль акустической базы и величину их разности.
Эти измерения следует остановить при обнаружении i-того измерительного объема, в котором измеряемая разность времен прохождения УЗ импульсами акустической базы между оппозитными ЭАП будет минимальной Δtпопер. Это возможно в том случае, когда  , а векторы С фазовой скорости УЗ в жидкости и скорости υ течения жидкой среды являются катетами прямоугольного треугольника при обоих направлениях прохождения акустической базы. Следует отметить, что для продольного направления векторы С фазовой скорости УЗ жидкой среде и υ скорости течения жидкой среды находятся на одной прямой, при прохождении УЗ импульсом измерительного объема - слева направо, т.е в попутном направлении -
, а векторы С фазовой скорости УЗ в жидкости и скорости υ течения жидкой среды являются катетами прямоугольного треугольника при обоих направлениях прохождения акустической базы. Следует отметить, что для продольного направления векторы С фазовой скорости УЗ жидкой среде и υ скорости течения жидкой среды находятся на одной прямой, при прохождении УЗ импульсом измерительного объема - слева направо, т.е в попутном направлении -  при обратном прохождении, т.е навстречу потоку жидкости -
при обратном прохождении, т.е навстречу потоку жидкости -  ,
,  На фиг. 1 - α - угол между υ и С, эти скорости для продольного и поперечного направлений измерительных каналов ЭАП1 - ЭАП1', …, ЭАП(i+2) - ЭАП(i+2)' указаны стрелками разной длины.
На фиг. 1 - α - угол между υ и С, эти скорости для продольного и поперечного направлений измерительных каналов ЭАП1 - ЭАП1', …, ЭАП(i+2) - ЭАП(i+2)' указаны стрелками разной длины.
Время t1прод распространения УЗ волны вдоль акустической базы от ЭАП1 к ЭАП1' (по скорости υ движения жидкой среды) выдает канал продольного направления 11

Время t2прод распространения УЗ волны вдоль акустической базы от ЭАП1' к ЭАП1 (против скорости υ движения жидкой среды) выдает канал продольного направления 11

Здесь  - временная задержка (аппаратурная) в электронной измерительной схеме.
- временная задержка (аппаратурная) в электронной измерительной схеме.
Разность времен 
с учетом того , что c2  . Уточним, что
. Уточним, что  - величина, получаемая в результате экспериментальных измерений, выдает канал поперечного направления 10, l - заданная величина акустической базы, значение скорости υ движения жидкой среды надо определить, причем, в предлагаемом способе предложено вычислять значение скорости υ движения жидкой среды в пространстве измерительного объема (в блоке обработки 12), получив соотношение для скорости С распространения УЗ волны на заданном горизонте движущейся жидкости из (4).
- величина, получаемая в результате экспериментальных измерений, выдает канал поперечного направления 10, l - заданная величина акустической базы, значение скорости υ движения жидкой среды надо определить, причем, в предлагаемом способе предложено вычислять значение скорости υ движения жидкой среды в пространстве измерительного объема (в блоке обработки 12), получив соотношение для скорости С распространения УЗ волны на заданном горизонте движущейся жидкости из (4).
Итак, для определения С в области измерений осуществим УЗ излучение от ЭАП (i+2) к ЭАП(i+2)' в поперечном направлении (фиг. 1). УЗ волны вдоль акустической базы от ЭАП (i+2) к ЭАП(i+2)' (между υ и с - острый угол α)

 α и cosα - из геометрии на фиг 1 определим.
α и cosα - из геометрии на фиг 1 определим.
Продолжим алгебраические преобразования, нам надо выразить с2 и подставить в выражение для разности времен при продольном направлении.

После подстановки видно, что в данном уравнении известны все члены, кроме υ - скорости течения жидкой среды 
Нужно получить приведенное квадратное уравнение вида  , где
, где  ).
).
Для этого преобразуем последовательно



B -коэффициент при υ в первой степени, свободный член - D
Корни приведенного квадратного уравнения 
Таким образом, значение υ - скорости течения жидкой среды можно вычислить, выбирая положительное и физически разумное значение величины (13 - блок отображения, регистрации и документирования результатов)
Следует отметить, что обратимые ЭАП 2 в УЗ диапазоне являются направленными и обладают одинаковыми коэффициентами концентрации К, что эффективно для уменьшения влияния на измерения отражений, уменьшения помех, создаваемых внешними источниками шума в водной среде измерительного объема, а также дает возможность изменения временной задержки в электронной измерительной схеме.
Так, при неизменной апертуре ЭАП2 в виде плоского диска диаметром Д увеличение частоты в а раз приводит к такому же уменьшению длины волны λ и , соответственно, увеличению коэффициента концентрации  (см. Акустические измерения. Колесников А.Е. Использование направленных приемников и излучателей звука в замкнутых объемах и при натурных измерениях, с. 71-78. - Л.: Судостроение, 256 с.) В свою очередь, помехоустойчивость
(см. Акустические измерения. Колесников А.Е. Использование направленных приемников и излучателей звука в замкнутых объемах и при натурных измерениях, с. 71-78. - Л.: Судостроение, 256 с.) В свою очередь, помехоустойчивость  определяется отношением как мощностей
определяется отношением как мощностей  сигнала и помех на выходе преобразователя, так и интенсивностей сигнала и помехи
сигнала и помех на выходе преобразователя, так и интенсивностей сигнала и помехи  , измеренных в месте нахождения преобразователя при условии его отсутствия, а также его коэффициентом осевой концентрации К для направления
, измеренных в месте нахождения преобразователя при условии его отсутствия, а также его коэффициентом осевой концентрации К для направления  , которое в нашем случае совпадает с акустической осью характеристики направленности (ХН) ЭАП2
, которое в нашем случае совпадает с акустической осью характеристики направленности (ХН) ЭАП2  .
.
Из теории электрических цепей (см. Гоноровский И.С. Радиосигналы и переходные процессы в радиоцепях. М., Связьиздат, 1954) известно, что воздействие импульса гармонического колебания с частотой, равной собственной частоте избирательной системы (например, на резонансный усилитель) приводит к возникновению переходных процессов, проявляющихся в «затягивании» переднего и заднего фронтов. Возникновение запаздывания в формировании огибающей установившегося импульсного выходного сигнала (передний фронт) приводит к появлению времени задержки (аппаратурного) в электронной измерительной схеме, которое добавляется ко времени пробега измеряемого расстояния упругими волнами и может вносить погрешность в результаты измерений. Аппаратурное время задержки определяется совместным действием двух факторов - полосой пропускания тракта и уровнем дискриминации сигнала при его детектировании. В эхо-импульсных устройствах уровень дискриминации вводится в приемный тракт для исключения ложных показаний устройства при наличии внешних акустических и других помех, причем, для фиксации информативного сигнала необходимо его превышение над установленным порогом дискриминации. Для возможно большего ослабления флуктуаций аппаратурного времени задержки, определяющего величину погрешности проводимых измерений, необходимо как уменьшать порог дискриминации, так и увеличивать уровень полезного информативного сигнала. Известны расчетные значения времени аппаратурного запаздывания (мксек), и соответствующего дополнительного расстояния (см) при относительных уровнях дискриминации 0,5; 0,3; 0,1 от установившейся величины информационного сигнала: 220 мксек и 16,3 см; 114 мксек и 8,1 см; 33 мксек и 2,4 см. Таким образом, применение многочастотного (ƒ1 , ƒ2=аƒ1…ƒ3=вƒ1) излучающего тракта аппаратуры дает возможность уменьшать величину погрешности проводимых измерений за счет применения более высокочастотного УЗ.
При проведении испытаний было установлено, что временной интервал при измерении потока воды со скоростью менее 1м/с при размере акустической базы 15 см достигает нескольких наносекунд. Основное влияние на точность измерения скорости потока оказывает погрешность фиксации временного интервала , которую определяет погрешность фиксации момента принятия информационного импульса, возникающая из-за ограниченного отношения сигнал/шум. Относительная погрешность фиксации разности временных интервалов рассчитывается как  -1. Например, при заданных
-1. Например, при заданных  п=100 мс, Δ=1%,
п=100 мс, Δ=1%,  =40 нс необходимое отношение сигнал/шум ≈102, это требует применения ЭАП с полосой пропускания около 1МГц при подаче на пьезоэлемент толщиной 0,3 мм и диаметром 10 мм импульса возбуждения амплитудой около 102 В.
=40 нс необходимое отношение сигнал/шум ≈102, это требует применения ЭАП с полосой пропускания около 1МГц при подаче на пьезоэлемент толщиной 0,3 мм и диаметром 10 мм импульса возбуждения амплитудой около 102 В.
Заявляемый способ может найти широкое применение при измерении скорости подводных течений, поскольку обеспечивает уменьшение результирующей погрешности гидроакустической контрольно-измерительной аппаратуры, в частности, средств обеспечения океанографических исследований. При этом достигается высокая точность измерения скорости течения в измерительном объеме водной среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический способ измерения параметров движения слоистой морской среды на прибрежной акватории | 2023 |
|
RU2833473C1 |
| Акустический способ измерения параметров движения слоистой морской среды | 2022 |
|
RU2801053C1 |
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| Многочастотный доплеровский способ измерений скорости течений в водной среде | 2022 |
|
RU2795579C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| МНОГОЧАСТОТНЫЙ КОРРЕЛЯЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ | 2022 |
|
RU2795577C1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| Корреляционный способ измерения параметров тонкой структуры водной среды | 2022 |
|
RU2799974C1 |
| Способ градуировки обратимых электроакустических преобразователей антенн корреляционного измерителя скорости течений | 2023 |
|
RU2835804C1 |
| Устройство для градуировки электроакустических преобразователей | 2020 |
|
RU2782354C2 |
Изобретение относится к области гидроакустики, в частности к способам измерения скорости подводных течений с использованием ультразвуковых волн. Способ характеризуется тем, что формируют m измерительных объемов, оси которых проходят через центр конструкционного кольца, лежат в его плоскости и совпадают со встречно направленными акустическими осями оппозитно расположенных ЭАП на внешней поверхности кольца, образуя в пространстве 1, 2, …i, …m возможных вариантов ориентации оси используемого измерительного объема относительно направления движения потока жидкости, имеющего скорость υ, проводят последовательно излучение УЗ-импульсов по направлению и навстречу движению потока жидкой среды и соответствующие измерения времени распространения УЗ-импульсов в жидкой среде для каждого из (m) измерительных объемов водной среды путем коммутации в заданном порядке трактов излучения, приема и обработки аппаратуры до обнаружения i-го измерительного объема, в котором измеряемая разность времен прохождения УЗ-импульсами акустической базы между оппозитными ЭАП - по направлению, а также навстречу движению водной среды - будет минимальной Δtпопер, используют наиболее точные данные, полученные для (i-1)-го измерительного канала на частотах ƒ1, ƒ2=aƒ1…ƒ3=вƒ1, в частности величину времени прохождения t1попер УЗ-импульсами по направлению, для вычисления величины угла α1 и, соответственно, cosα1 из геометрических параметров кольцевого конструкционного элемента, определяют соотношение для скорости С распространения УЗ-волны с частотами ƒ1, ƒ2=aƒ1…ƒ3=вƒ1 в пространстве измерительного объема, выбирают для осуществления измерений на частотах ƒ1, ƒ2=aƒ1…ƒ3=вƒ1 еще один из m измерительных объемов, причем тот, у которого ось сдвинута относительно оси i-го измерительного канала на 90°, проводят последовательно излучение УЗ-импульсов по направлению и навстречу движению потока жидкой среды и соответствующие измерения времени распространения УЗ-импульсов в жидкой среде для данного измерительного объема водной среды путем коммутации в заданном порядке трактов излучения, приема и обработки аппаратуры, причем в выбранном канале разность времен Δtпрод продольного прохождения УЗ-импульсами акустической базы между ЭАП - по направлению, а также навстречу движению водной среды - будет максимальной Δtпрод, вычисляют значение скорости υ движения жидкой среды в пространстве измерительного объема на заданном горизонте движущейся жидкости и производят измерения других значений скорости течений в следующих по глубине измерительных водных объемах. Технический результат – повышение точности измерения скорости течения в измерительном объеме водной среды. 1 ил.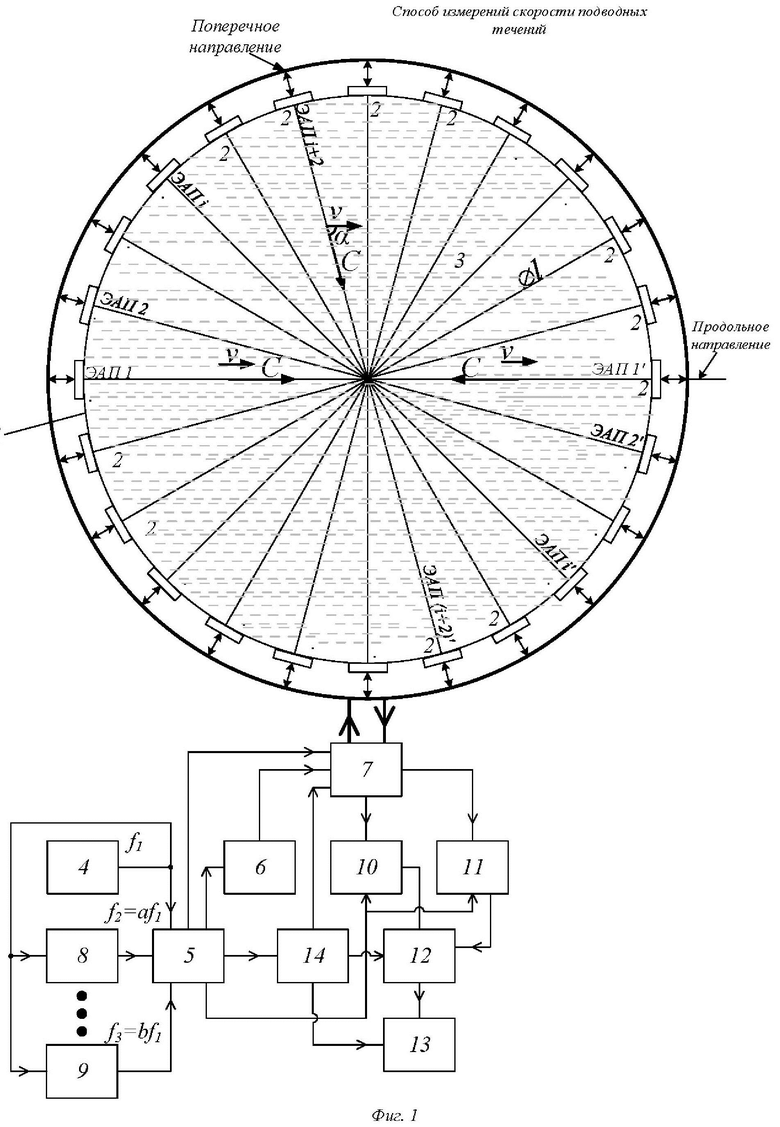
Способ измерения скорости подводных течений, заключающийся в том, что
- закрепляют посредством конструкционного элемента в измерительном объеме для формирования акустической базы с выбранной ориентацией в пространстве идентичные конструктивно и по пространственным характеристикам УЗ-полей приемоизлучающие электроакустические преобразователи (ЭАП), установленные оппозитно на заданном расстоянии l друг от друга;
- формируют измерительный объем для определения скорости υ движения жидкой среды так, что акустические оси ЭАП пространственно совпадают с выбранной ориентацией в пространстве оси акустической базы в нем, но направлены встречно;
- вырабатывают в излучающем тракте аппаратуры импульсные электрические сигналы с частотой заполнения ƒ и поочередно подают их на пьезоэлементы оппозитно расположенных ЭАП;
- излучают в измерительный объем поочередно УЗ-импульсы, распространяющиеся со скоростью С, по направлению и навстречу движению потока жидкой среды со скоростью υ, причем направления векторов данных скоростей могут образовывать величины в диапазонах как острых α, так и тупых углов (180°-α) соответственно;
- измеряют в приемном тракте аппаратуры два значения времени распространения УЗ-импульсов в движущейся жидкой среде - по направлению ее движения, а также навстречу - вдоль акустической базы и величину их разности;
- рассчитывают в блоке обработки результатов измерений скорость движения υ жидкой среды в пределах измерительного объема;
отличающийся тем, что:
- выполняют конструкционной элемент в виде кольца диаметром l, равным акустической базе l измерительного объема;
- устанавливают оппозитно на внешней поверхности кольцевого конструкционного элемента m обратимых ЭАП;
- формируют m измерительных объемов, оси которых проходят через центр кольца, лежат в его плоскости и совпадают со встречно направленными акустическими осями оппозитно расположенных ЭАП, образуя в пространстве 1, 2, …i, …m возможных вариантов ориентации оси используемого измерительного объема относительно направления движения потока жидкости, имеющего скорость υ;
- проводят последовательно излучение УЗ-импульсов по направлению и навстречу движению потока жидкой среды и соответствующие измерения времени распространения УЗ-импульсов в жидкой среде для каждого из m измерительных объемов водной среды путем коммутации в заданном порядке трактов излучения, приема и обработки аппаратуры до обнаружения i-го измерительного объема, в котором измеряемая разность времен прохождения УЗ-импульсами акустической базы между оппозитными ЭАП - по направлению, а также навстречу движению водной среды - будет минимальной Δtпопер;
- используют наиболее точные данные, полученные для (i-1)-го измерительного канала на частотах ƒ1, ƒ2=аƒ1…ƒ3=вƒ1, в частности величину времени прохождения t1попер УЗ-импульсами по направлению, для вычисления величины угла α1 и, соответственно, cosα1 из геометрических параметров кольцевого конструкционного элемента;
- определяют соотношение для скорости С распространения УЗ-волны с частотами ƒ1, ƒ2=аƒ1…ƒ3=вƒ1 в пространстве измерительного объема;
- выбирают для осуществления измерений на частотах ƒ1, ƒ2=аƒ1…ƒ3=вƒ1 еще один из m измерительных объемов, причем тот, у которого ось сдвинута относительно оси i-го измерительного канала на 90°;
- проводят последовательно излучение УЗ-импульсов по направлению и навстречу движению потока жидкой среды и соответствующие измерения времени распространения УЗ-импульсов в жидкой среде для данного измерительного объема водной среды путем коммутации в заданном порядке трактов излучения, приема и обработки аппаратуры, причем в выбранном канале разность времен Δtпрод продольного прохождения УЗ-импульсами акустической базы между ЭАП - по направлению, а также навстречу движению водной среды - будет максимальной Δtпрод;
- вычисляют значение скорости υ движения жидкой среды в пространстве измерительного объема на заданном горизонте движущейся жидкости;
- производят измерения других значений скорости течений в следующих по глубине измерительных водных объемах;
- регистрируют и документируют результаты измерений в аппаратуре.
| Ультразвук | |||
| Маленькая энциклопедия | |||
| Глав | |||
| ред | |||
| И.П | |||
| Голямина | |||
| Расходомер ультразвуковой, с | |||
| ТКАЦКИЙ СТАНОК | 1920 |
|
SU300A1 |
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |
| СПОСОБ ПОВЫШЕНИЯ УРОЖАЙНОСТИ РАСТЕНИЙ | 0 |
|
SU179554A1 |
| Акустический способ и устройство измерения параметров морского волнения | 2019 |
|
RU2721307C1 |
| 0 |
|
SU153021A1 | |
