Изобретение относится к области гидроакустики и океанографии, в частности к корреляционным методам измерения скорости движения, позволяющим определять скорость судна как относительно дна, так и относительно пассивно переносимых течениями рассеивателей, находящихся в слоях тонкой структуры водной среды океана, а также сопровождается измерением глубин акватории по пути следования с требуемой точностью.
Изобретение может быть применено для измерения акустическим способом пространственно-временной картины поля течений, которое рассматривается как анизотропное и неоднородное. Скорость течения является случайной функцией географических координат места измерения, глубины горизонта и времени. В частности, при пересечении поля в горизонтальной плоскости интервалы временной корреляции скорости течений оцениваются в единицы часов, а интервал пространственной корреляции - примерно до тысяч метров. Работоспособность способа основана на том, что информацию получают за счет эхозондирования ультразвуком совокупностей рассеивателей в 1,2,…, , ..,
, .., слоях неоднородной водной среды, которые разделены граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, скорость звука, например, вертикальный градиент скорости на границах между слоями может превышать 5 -10 см/с на метр глубины), причем совокупности рассеивателей случайным образом и статистически неоднородно распределены в водных объемах слоев (от 1 до k). Рассеиватели (пузырьки, взвешенные частицы, планктон, различные неоднородности и т.п.) в слоях имеют нейтральную плавучесть, пассивно переносятся водными массами с различными линейными скоростями течений
слоях неоднородной водной среды, которые разделены граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, скорость звука, например, вертикальный градиент скорости на границах между слоями может превышать 5 -10 см/с на метр глубины), причем совокупности рассеивателей случайным образом и статистически неоднородно распределены в водных объемах слоев (от 1 до k). Рассеиватели (пузырьки, взвешенные частицы, планктон, различные неоднородности и т.п.) в слоях имеют нейтральную плавучесть, пассивно переносятся водными массами с различными линейными скоростями течений  относительно дна, причем величины их акустических сопротивлений
относительно дна, причем величины их акустических сопротивлений  ,
,  , ….,
, ….,  произвольно флюктуируют относительно значения акустического сопротивления
произвольно флюктуируют относительно значения акустического сопротивления  водной среды, т.е. в общем случае совокупность рассеивателей может быть как акустически мягкой, так и акустически жесткой относительно водной среды. С акустической точки зрения планктон представляет собой совокупность рассеивателей в водной среде, плотность и сжимаемость которых отличается от аналогичных характеристик окружающей жидкости, причем эффективность рассеяния ультразвука зависит от того, насколько плотность и сжимаемость рассеивателей отличаются от соответствующих свойств окружающей среды и от того, в каком соотношении находятся размеры рассеивателей и длина УЗ волны. Регистрация акустического сопротивления поверхности совокупности рассеивателей, которое характеризует ее динамическую реакцию на воздействие упругой волны, в результате чего происходят фазовые сдвиги или для звукового давления («акустически мягкая» граница) или для колебательной скорости частиц среды («акустически жесткая» граница) в отраженной волне, может позволить использовать эту величину в качестве дополнительного классификационного признака для исследования анизотропной и неоднородной пространственно-временной картины поля течений.
водной среды, т.е. в общем случае совокупность рассеивателей может быть как акустически мягкой, так и акустически жесткой относительно водной среды. С акустической точки зрения планктон представляет собой совокупность рассеивателей в водной среде, плотность и сжимаемость которых отличается от аналогичных характеристик окружающей жидкости, причем эффективность рассеяния ультразвука зависит от того, насколько плотность и сжимаемость рассеивателей отличаются от соответствующих свойств окружающей среды и от того, в каком соотношении находятся размеры рассеивателей и длина УЗ волны. Регистрация акустического сопротивления поверхности совокупности рассеивателей, которое характеризует ее динамическую реакцию на воздействие упругой волны, в результате чего происходят фазовые сдвиги или для звукового давления («акустически мягкая» граница) или для колебательной скорости частиц среды («акустически жесткая» граница) в отраженной волне, может позволить использовать эту величину в качестве дополнительного классификационного признака для исследования анизотропной и неоднородной пространственно-временной картины поля течений.
Известен автокорреляционный метод измерения скорости судна, в котором для определения его абсолютной скорости используется ее однозначная зависимость от величины коэффициента  автокорреляции низкочастотной огибающей эхосигнала от морского дна (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с.119-121).
автокорреляции низкочастотной огибающей эхосигнала от морского дна (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с.119-121).
Указанный способ реализуется следующим образом:
1) размещают на днище судна ИПИА, состоящую из необходимого количества электроакустических преобразователей (ЭАП), каждый из которых снабжен пьезоэлементом, узлами экранировки, гидро-, электро- и шумоизоляции;
2) обеспечивают работоспособность режимов излучения/приема каждого ЭАП за счет использования обратного/прямого пьезоэлектрических эффектов для пьезоэлемента простой геометрической формы (стержень, пластина, диск) с заданной резонансной частотой  ;
;
3) регулируют пространственное расположение акустической оси ИПИА до совпадения с нормалью относительно дна, что обеспечивает облучение сверху вниз УЗ энергией участка границы раздела «вода - дно» со случайным распределением донных неровностей через совокупности рассеивателей водной среды, в 1,2,…, , ..,
, .., слоях которой они случайным образом и статистически неоднородно распределены, рассеиватели имеют нейтральную плавучесть и акустическое сопротивление
слоях которой они случайным образом и статистически неоднородно распределены, рассеиватели имеют нейтральную плавучесть и акустическое сопротивление  , отличающееся от аналогичного параметра водной среды, пассивно переносятся водными массами с различными линейными скоростями течений
, отличающееся от аналогичного параметра водной среды, пассивно переносятся водными массами с различными линейными скоростями течений  относительно дна;
относительно дна;
4) генерируют в излучающем тракте аппаратуры электрические колебания, которые преобразуют в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму импульсов прямоугольной формы, а посылка содержит в себе несущую частоту  ;
;
5) преобразуют с помощью обратного пьезоэффекта электрические сигналы с помощью пьезоэлементов ЭАП ИПИА в периодические посылки УЗ волн с необходимой длительностью, обеспечивая передачу частицам водной среды акустической энергии за счет распространения колебаний с циклической частотой  , что формирует за счет интерференции в водной среде УЗ пучок;
, что формирует за счет интерференции в водной среде УЗ пучок;
6) осуществляют УЗ облучение и устанавливают акустические контакты с поверхностями участков:
- границы раздела «вода - дно» со случайным распределением донных неровностей,
- совокупностей рассеивателей водной среды, в 1, 2,…,, .., слоях которой они случайным образом и статистически неоднородно распределены, рассеиватели имеют нейтральную плавучесть,
например, на  -том горизонте глубины - их количество составляет
-том горизонте глубины - их количество составляет  , каждая совокупность из находящихся в -том слое имеет свой линейный размер
, каждая совокупность из находящихся в -том слое имеет свой линейный размер  , отражательную способность
, отражательную способность  и акустическое сопротивление , причем совокупность может быть как акустически жесткой
и акустическое сопротивление , причем совокупность может быть как акустически жесткой  >
> ), так и акустически мягкой
), так и акустически мягкой  <
<  ) - относительно водной среды, пассивно переносятся водными массами с линейной скоростью течения относительно дна;
) - относительно водной среды, пассивно переносятся водными массами с линейной скоростью течения относительно дна;
7) обеспечивают за счет движения судна-носителя аппаратуры непрерывное изменение положения ИПИА относительно
как совокупностей рассеивателей водной среды, в 1,2,…,, .., слоях которой они случайным образом и статистически неоднородно распределены, а также пассивно переносятся водными массами с различными линейными скоростями течений относительно дна,
так и множества случайно распределенных донных неровностей,
что обусловит формирование объемного реверберационного процесса и запаздывающего эхосигнала, квадрат огибающей которых будет содержать спектр частот, а их огибающая будет флуктуировать хаотическим образом;
8) преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП ИПИА флуктуирующий по амплитуде эхосигнал от перемещающейся области неровного морского дна, в соответствующий электрический сигнал, поступающий на вход приемного тракта аппаратуры;
9) определяют в приемном тракте аппаратуры величину коэффициента автокорреляции огибающей эхосигнала, что позволяет вычислить скорость движения судна  ;
;
10) отображают, регистрируют и документируют результаты измерений в аппаратуре.
Автокорреляционный метод измерения скорости требует использования одной ИПИА, исключены погрешности, связанные с ориентировкой антенны относительно направления движения, однако ему присущи следующие недостатки:
1) требуется стационарность принимаемого эхосигнала и, соответственно, повторяемость формы автокорреляционных функций для каждого значения скорости движения, что трудно осуществимо на практике, так как в реальных условиях форма автокорреляционной функции будет различной при одной и той же скорости движения судна в различных районах дна океана. В специфических условиях эксплуатации (маневрирование как на рейде, так и в порту, обеспечение шлюзования и швартовки) работоспособность указанного способа вследствие применения указанной выше обработки лишь амплитудных характеристик эхосигналов может быть нарушена, поскольку на акваториях «рукотворных» водных путей (судоходные каналы внутренней транспортной системы рек, озер, водохранилищ и т.д., искусственные каналы и фарватеры гаваней) практически отсутствуют неровности рельефа донной поверхности за счет проведения дноуглубительных работ.
2) точность измерения скорости ограничена отсутствием возможности регулировки остроты направленного действия ИПИА и одночастотным режимом работы. Как следует из соотношения 
 максимальная частота флуктуаций
максимальная частота флуктуаций  огибающей эхосигнала от перемещающейся за счет движения судна области неровного морского дна (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с.109) зависит как от скорости судна υ и угловой ширины основного лепестка ХН приемоизлучающей антенны
огибающей эхосигнала от перемещающейся за счет движения судна области неровного морского дна (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с.109) зависит как от скорости судна υ и угловой ширины основного лепестка ХН приемоизлучающей антенны  , так и длины волны λ зондирующего сигнала, что, в конечном итоге определяет значительность методических и инструментальных погрешностей автокорреляционного способа.
, так и длины волны λ зондирующего сигнала, что, в конечном итоге определяет значительность методических и инструментальных погрешностей автокорреляционного способа.
3) в способе не предусмотрена возможность измерения глубины под килем движущегося судна, относительной скорости его движения, а также измерение параметров течений в слоях тонкой структуры статистически неоднородной водной среды. Так, для решения указанной выше задачи в приемном тракте устройства осуществляется обработка только амплитудных признаков эхосигналов, имеющихся в гидроакустическом канале, в то время как для получения более полного объема первичных данных о параметрах течений в слоях тонкой структуры статистически неоднородной водной среды со случайно распределенными в их объемах рассеивателей необходимо дополнительно использовать фазовые признаки эхосигналов.
Известен взаимокорреляционный способ измерения скорости судна- носителя аппаратуры, в котором для расчета скорости используется ее однозначная зависимость от величины коэффициента взаимной корреляции флуктуаций огибающих эхосигналов от дна, принятых разнесенными в пространстве интерференционными приемными антеннами (ИПА) (см. Логинов К.В. Электронавигационные и рыбопоисковые приборы. - М.: Легкая и пищевая пром-сть, 1983, с.203- 204).
Указанный способ реализуется следующим образом:
1) размещают на днище судна в его диаметральной плоскости три антенны - интерференционные излучающую (далее - ИИА) и две приемные (далее - ИПА), состоящие из необходимого количества ЭАП, каждый из которых снабжен пьезоэлементом, узлами экранировки, гидро-, электро- и шумоизоляции, причем акустические оси всех антенн совпадают с нормалями относительно дна, ИПА разнесены на известное расстояние L друг от друга и расположены в кормовой и носовой частях судна, а ИИА - находится посередине между ними;
2) обеспечивают работоспособность режимов излучения/приема каждого ЭАП за счет использования обратного/прямого пьезоэлектрических эффектов для пьезоэлемента простой геометрической формы (стержень, пластина, диск) с заданной резонансной частотой  ;
;
3) генерируют в излучающем тракте аппаратуры электрические колебания и их преобразуют в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму импульсов прямоугольной формы, а посылка содержит в себе несущую частоту ;
4) преобразуют с помощью обратного пьезоэффекта пьезоэлементов ЭАП ИИА амплитудно-импульсные модулированные колебания в периодические посылки УЗ волн с необходимой длительностью, обеспечивая передачу частицам водной среды акустической энергии за счет распространения колебаний с циклической частотой  , что формирует за счет интерференции в водной среде УЗ импульсное излучение;
, что формирует за счет интерференции в водной среде УЗ импульсное излучение;
5) осуществляют за счет проведения цикла эхозондирования первой парой антенн - ИИА и носовой ИПА - первых акустических контактов с участками поверхностей
- совокупностей рассеивателей водной среды, в 1, 2,…,, .., слоях которой они случайным образом и статистически неоднородно распределены, рассеиватели имеют нейтральную плавучесть, например, на -том горизонте глубины - их количество составляет , каждая совокупность из находящихся в -том слое имеет свой линейный размер , отражательную способность и акустическое сопротивление , причем совокупность может быть как акустически жесткой >), так и акустически мягкой < ) - относительно водной среды, пассивно переносятся водными массами с линейной скоростью течения относительно дна,
и границы раздела «вода - дно» со случайным распределением донных неровностей,
что обеспечивает формирование первых информационных сигналов - объемного реверберационного процесса и запаздывающего эхосигнала, квадрат огибающих которых будет содержать спектр частот, а их огибающая будет флуктуировать хаотическим образом;
6) преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой ИПА первые информационные сигналы, в частности, флуктуирующий по амплитуде эхосигнал от участка поверхности границы раздела «вода - дно» со случайным распределением донных неровностей, в соответствующий электрический сигнал, поступающий на вход приемного тракта аппаратуры;
7) перемещают со скоростью  судно-носитель аппаратуры по курсу движения так, чтобы вторая пара антенн - ИИА и кормовая ИПА - разместилась над тем же самым участком поверхности границы раздела «вода - дно» со случайным распределением донных неровностей,
судно-носитель аппаратуры по курсу движения так, чтобы вторая пара антенн - ИИА и кормовая ИПА - разместилась над тем же самым участком поверхности границы раздела «вода - дно» со случайным распределением донных неровностей,
но уже другими участками поверхностей совокупностей рассеивателей водной среды, в 1, 2,…,, .., слоях которой они по-другому, но также случайным образом и статистически неоднородно распределены, например, на -том горизонте глубины - их количество составит уже  , каждая совокупность из находящихся в -том слое может иметь другие - линейный размер
, каждая совокупность из находящихся в -том слое может иметь другие - линейный размер  , отражательную способность
, отражательную способность  и акустическое сопротивление
и акустическое сопротивление  , причем совокупность может быть как акустически жесткой
, причем совокупность может быть как акустически жесткой  >), так и акустически мягкой
>), так и акустически мягкой  <
< ) - относительно водной среды, причем они оказались в области УЗ облучения за счет переноса водными массами с линейной скоростью течений
) - относительно водной среды, причем они оказались в области УЗ облучения за счет переноса водными массами с линейной скоростью течений  относительно дна;
относительно дна;
8) осуществляют за счет проведения цикла эхозондирования второй парой антенн - ИИА и кормовой ИПА акустические контакты с участками поверхностей
- других совокупностей рассеивателей водной среды, в 1, 2,…,, .., слоях которой они также случайным образом и статистически неоднородно распределены, причем они оказались в области УЗ облучения за счет переноса водными массами с различными линейными скоростями течений относительно дна, например, на -том горизонте глубины с линейной скоростью течений относительно дна - количество составит при линейных размерах , отражательных способностях и акустических сопротивлениях , причем каждая совокупность может быть как акустически жесткой >), так и акустически мягкой <) - относительно водной среды,
и той же границы раздела «вода - дно» с тем же самым случайным распределением донных неровностей,
что обеспечивает формирование сдвинутых во времени вторых информационных сигналов - объемного реверберационного процесса и запаздывающего эхосигнала, квадрат огибающих которых будет содержать спектр частот, а их огибающая будет флуктуировать хаотическим образом;
9) преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП кормовой ИПА сдвинутые во времени вторые информационные сигналы, в частности, флуктуирующего по амплитуде эхосигнала от того же самого участка поверхности границы раздела «вода - дно», имеющего случайное распределение донных неровностей, в соответствующий электрический сигнал, поступающий на вход приемного тракта аппаратуры;
10) определяют в приемном тракте аппаратуры величину коэффициента взаимной корреляции для флуктуирующих хаотическим образом во времени огибающих первого и второго электрических сигналов, соответствующих одному и тому же участку поверхности границы раздела «вода - дно», имеющего случайное распределение донных неровностей, что позволяет вычислить скорость движения судна  ;
;
11) отображают, регистрируют и документируют результаты измерений в аппаратуре.
Однако данному взаимокорреляционному способу измерения скорости судна-носителя аппаратуры присущи следующие недостатки:
1) точность измерения путевой скорости ограничена отсутствием возможности регулировки остроты направленного действия ИИА и ИПА и одночастотным режимом их функционирования. Так, например, относительная флуктуационная погрешность измерения путевой скорости  (методическая погрешность измерений, обусловленная вероятностным характером флуктуаций огибающей эхосигналов от дна) определяется соотношением
(методическая погрешность измерений, обусловленная вероятностным характером флуктуаций огибающей эхосигналов от дна) определяется соотношением

где коэффициент  (0,3 - 0,4) определяется рассеивающими свойствами морского дна,
(0,3 - 0,4) определяется рассеивающими свойствами морского дна,  продольный разнос (база) ИПА,
продольный разнос (база) ИПА,  время осреднения данных (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с.143-157). Из (1) следует, что относительная флуктуационная погрешность измерения путевой скорости
время осреднения данных (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с.143-157). Из (1) следует, что относительная флуктуационная погрешность измерения путевой скорости  определяется техническими параметрами системы и в наибольшей степени зависит от значений измеряемой скорости, длины волны зондирующего сигнала, остроты направленного действия приемоизлучающей антенны, причем для снижения погрешности предлагается увеличивать продольный разнос антенн и время усреднения, повышать рабочую частоту и увеличивать угловую ширину основного лепестка ХН (для интерференционных антенн при неизменной апертуре при повышении рабочей частоты острота направленного действия повышается, т.е. угловая ширина основного лепестка ХН уменьшается).
определяется техническими параметрами системы и в наибольшей степени зависит от значений измеряемой скорости, длины волны зондирующего сигнала, остроты направленного действия приемоизлучающей антенны, причем для снижения погрешности предлагается увеличивать продольный разнос антенн и время усреднения, повышать рабочую частоту и увеличивать угловую ширину основного лепестка ХН (для интерференционных антенн при неизменной апертуре при повышении рабочей частоты острота направленного действия повышается, т.е. угловая ширина основного лепестка ХН уменьшается).
2) в способе не предусмотрена возможность изменения точности измерения глубины под килем судна. Так, маскировка реального рельефа морского дна по пути следования судна обусловлена сферичностью волнового фронта УЗ зондирующих сигналов вследствие чего возникает неопределенность в оценке фактической глубины (см. Кудрявцев В.И. Промысловая гидроакустика и рыболокация. М.: Пищевая пром-сть, 1978, с.255-258;
3) гидрофизические поля океана характеризуются наличием тонкой структуры ступенчатого характера, т.е. достаточно однородных по свойствам слоев с толщинами от десятков метров до единиц сантиметров, которые отделены друг от друга граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, плотность, скорость звука). Для получения информации о наличии данной слоистой стратификации водной среды необходима обработка амплитудных и фазовых признаков сигналов объемной реверберации, работоспособность предлагаемого способа может быть основана на установлении эхоконтактов с рассеивателями, которые случайным образом и статистически неоднородно распределены в водных объемах слоев и пассивно переносятся водными массами с различными линейными скоростями течений относительно дна.
4) для получения более полного объема первичных данных о параметрах течений в слоях тонкой структуры статистически неоднородной водной среды актуально осуществлять измерение набора значений - размера, отражательной способности и акустического сопротивления, причем величина последнего произвольно флюктуируют относительно значения акустического сопротивления водной среды. Однако в указанном способе не предусмотрена возможность регистрации такого информативного параметра совокупностей рассеивателей в любом из  слоев как акустическое сопротивление.
слоев как акустическое сопротивление.
Перечисленные недостатки взаимокорреляционных способов измерения путевой скорости ограничивают их применимость и делают более перспективным разработку аналогичных способов, функционирование которых основано на установлении статистической связи между случайными процессами, имеющими одинаковые корреляционные функции - двумя непрерывно регистрируемыми в реальном масштабе времени функциями распределения глубин водоема на пути следования судна.
В качестве прототипа выбран корреляционный гидроакустический способ, позволяющий определять путевую скорость судна, в котором для определения абсолютного значения путевой скорости используется ее однозначная зависимость от величины коэффициента взаимной корреляции двух непрерывно регистрируемых напряжений на выходах ИПИА как функций распределения глубин водоема (профиля дна) на пути следования судна (см. Справочник по гидроакустике. А.П. Евтютов, А.Е. Колесников и др. - Л.: Судостроение, 1982, с.28-29).
Указанный способ реализуется следующим образом:
1) размещают на расстоянии  в диаметральной плоскости судна, в частности, в носовой и кормовой частях днища, ИПИА эхолотных систем, которые состоят из необходимого количества электроакустических преобразователей (ЭАП), каждый из которых снабжен пьезоэлементом, узлами экранировки, гидро-, электро- и шумоизоляции, причем ИПИА ориентированы акустическими осями вертикально вниз, имеют одинаковые волновые размеры, причем облучаемые УЗ области дна под носом и кормой судна не перекрываются;
в диаметральной плоскости судна, в частности, в носовой и кормовой частях днища, ИПИА эхолотных систем, которые состоят из необходимого количества электроакустических преобразователей (ЭАП), каждый из которых снабжен пьезоэлементом, узлами экранировки, гидро-, электро- и шумоизоляции, причем ИПИА ориентированы акустическими осями вертикально вниз, имеют одинаковые волновые размеры, причем облучаемые УЗ области дна под носом и кормой судна не перекрываются;
2) обеспечивают работоспособность режимов излучения/приема каждого ЭАП за счет использования обратного/прямого пьезоэлектрических эффектов для пьезоэлемента простой геометрической формы (стержень, пластина, диск) с заданной резонансной частотой  ;
;
3) генерируют в излучающем тракте аппаратуры электрические колебания и преобразуют их в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму импульсов прямоугольной формы, а посылка содержит в себе несущую частоту ;
4) преобразуют с помощью обратного пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА амплитудно-импульсных модулированных колебаний в периодические посылки УЗ волн с необходимой длительностью, обеспечивая передачу частицам водной среды акустической энергии за счет распространения колебаний с циклической частотой и формируя за счет интерференции в водной среде под носовой и кормовой частями корпуса движущегося со скоростью  судна УЗ облучающие пучки;
судна УЗ облучающие пучки;
5) осуществляют акустические контакты с участками поверхностей:
- совокупностей рассеивателей водной среды, в 1, 2,…,, .., слоях которой они случайным образом и статистически неоднородно распределены, каждая совокупность рассеивателей в любом из слоев обладает «уникальным» набором характеристик, в частности, на -том горизонте глубины -количество структурных элементов , их линейный размер , отражательная способность и акустическое сопротивление , отличающееся от аналогичного параметра водной среды, и нейтральную плавучесть, вследствие чего совокупности рассеивателей пассивно переносятся водными массами с различными линейными скоростями течений относительно дна,
- границы раздела «вода - дно» со случайным распределением донных неровностей, причем эти поверхности участков находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью  судна, что обеспечивает одновременное формирование двух пространственно-временных зависимостей информационных сигналов - объемных реверберационных процессов и запаздывающих эхосигналов, квадраты огибающих которых будет содержать спектр частот, а их огибающие будет флуктуировать хаотическим образом;
судна, что обеспечивает одновременное формирование двух пространственно-временных зависимостей информационных сигналов - объемных реверберационных процессов и запаздывающих эхосигналов, квадраты огибающих которых будет содержать спектр частот, а их огибающие будет флуктуировать хаотическим образом;
6) преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА движущегося со скоростью  судна две пространственно-временные зависимости информационных сигналов, в частности, амплитуд эхосигналов от обоих облучаемых участков границы раздела «вода - дно» со случайными и различными распределениями донных неровностей, в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
судна две пространственно-временные зависимости информационных сигналов, в частности, амплитуд эхосигналов от обоих облучаемых участков границы раздела «вода - дно» со случайными и различными распределениями донных неровностей, в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
7) определяют по мере движения судна по заданному курсу две амплитудно-временные зависимости электрических сигналов  и
и  , визуализирующих акустические контакты с неровностями границы раздела «вода - дно», которые пропорциональны распределению глубин акватории под носовой и кормовой частями корпуса движущегося со скоростью
, визуализирующих акустические контакты с неровностями границы раздела «вода - дно», которые пропорциональны распределению глубин акватории под носовой и кормовой частями корпуса движущегося со скоростью  судна, причем эти функции идентичны друг другу, но сдвинуты во времени на величину
судна, причем эти функции идентичны друг другу, но сдвинуты во времени на величину  ;
;
8) определяют величину коэффициента взаимной корреляции для двух амплитудно-временных зависимостей электрических сигналов и , визуализирующих акустические контакты с неровностями границы раздела «вода - дно» и пропорциональных распределению глубин акватории под носовой и кормовой частями корпуса по курсу движения судна, что позволяет вычислить скорость движения судна  ;
;
9) отображают, регистрируют и документируют результаты измерений в аппаратуре.
Однако указанный корреляционный гидроакустический способ-прототип имеет следующие недостатки:
1) точность измерения путевой скорости ограничена отсутствием возможности регулировки остроты направленного действия узкополосных ЭАП ИПИА и их одночастотным режимом работы. Так, например, для рассматриваемого прототипа относительная флуктуационная погрешность измерения путевой скорости  , определяемая соотношением (1), так же актуальна и для рассмотренного выше аналога - способа взаимокорреляционного измерения путевой скорости (см. Логинов К.В. Электронавигационные и рыбопоисковые приборы. - М.: Легкая и пищевая пром-сть, 1983, с.203- 204). Из (1) следует, что несмотря на снижение величины относительной флуктуационной погрешности измерения путевой скорости за счет увеличения продольного разноса
, определяемая соотношением (1), так же актуальна и для рассмотренного выше аналога - способа взаимокорреляционного измерения путевой скорости (см. Логинов К.В. Электронавигационные и рыбопоисковые приборы. - М.: Легкая и пищевая пром-сть, 1983, с.203- 204). Из (1) следует, что несмотря на снижение величины относительной флуктуационной погрешности измерения путевой скорости за счет увеличения продольного разноса  (базы) ИПИА, в способе отсутствует возможность увеличения точностных характеристик за счет регулировки величины важного параметра -
(базы) ИПИА, в способе отсутствует возможность увеличения точностных характеристик за счет регулировки величины важного параметра -  - ширины пика взаимокорреляционной функции, что может быть необходимо при маневрировании судна с малыми скоростями движения
- ширины пика взаимокорреляционной функции, что может быть необходимо при маневрировании судна с малыми скоростями движения  в узкостях, на акватории гавани и т.д. В прототипе изменение ширины пика взаимокорреляционной функции затруднено тем, что данная величина определяется взаимосвязанными параметрами - длиной волны зондирующего сигнала и остротой направленного действия ИПИА. Так, при неизменной апертуре за счет уменьшения длины волны зондирующего сигнала острота направленного действия повышается, что следует из соотношения
в узкостях, на акватории гавани и т.д. В прототипе изменение ширины пика взаимокорреляционной функции затруднено тем, что данная величина определяется взаимосвязанными параметрами - длиной волны зондирующего сигнала и остротой направленного действия ИПИА. Так, при неизменной апертуре за счет уменьшения длины волны зондирующего сигнала острота направленного действия повышается, что следует из соотношения  (см. А.П. Евтютов, В.Б. Митько Инженерные расчеты в гидроакустике. - 2-е изд., перераб. и доп. - Л.: Судостроение, 1988. с.17-27). Точность измерения скорости существенно ухудшается при наличии амплитудных и фазовых флюктуаций, некоррелированных с перемещением судна, - при широком основном лепестке ХН антенны и соответствующем уровне ее бокового излучения причиной таких флюктуаций могут стать сигналы поверхностной реверберации;
(см. А.П. Евтютов, В.Б. Митько Инженерные расчеты в гидроакустике. - 2-е изд., перераб. и доп. - Л.: Судостроение, 1988. с.17-27). Точность измерения скорости существенно ухудшается при наличии амплитудных и фазовых флюктуаций, некоррелированных с перемещением судна, - при широком основном лепестке ХН антенны и соответствующем уровне ее бокового излучения причиной таких флюктуаций могут стать сигналы поверхностной реверберации;
2) в способе не предусмотрена возможность изменения точности измерения глубины под килем. Предложенная моностатическая схема эхолотирования для повышения точности профиля глубин водоема и подробной детализации рельефа дна может предполагать действия по подбору оптимальных пространственных характеристик УЗ полей, формируемых ИПИА, что в прототипе не осуществляется;
3) гидрофизические поля океана характеризуются наличием тонкой структуры ступенчатого характера, т.е. достаточно однородных по свойствам слоев с толщинами от десятков метров до единиц сантиметров, которые отделены друг от друга граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, плотность, скорость звука). Для получения информации о наличии данной слоистой стратификации водной среды оптимальна обработка сигналов объемной реверберации, однако, в данном способе-аналоге данные измерения не осуществляются, хотя рассеиватели (пузырьки, взвешенные частицы, планктон, различные неоднородности и т.п.) в слоях имеют нейтральную плавучесть и пассивно переносятся водными массами с различными линейными скоростями течений относительно дна;
4) в специфических условиях эксплуатации (маневрирование как на рейде, так и в порту, обеспечение шлюзования и швартовки) работоспособность корреляционного способа - прототипа с применением описанной выше обработки лишь амплитудных характеристик эхосигналов может быть нарушена. Дело в том, что на акваториях «рукотворных» водных путей (судоходные каналы внутренней транспортной системы рек, озер, водохранилищ и т.д., искусственные каналы и фарватеры гаваней) практически отсутствуют неровности рельефа донной поверхности за счет проведения дноуглубительных работ, в то время как различие акустических сопротивлений донной поверхности с выходами как плотных коренных пород («акустически жесткие»), так и газонасыщенных отложений - наносов («акустически мягкие») сохранено. В данных условиях эксплуатации в способе следует предусмотреть возможность регистрации изменения такого информативного параметра облучаемых участков донной поверхности на трассе движения как акустическое сопротивление границы раздела «вода-грунт». Таким образом, расширение эксплуатационных возможностей корреляционного способа - прототипа, позволяющего определять глубины акваторий и скорость судна-носителя аппаратуры относительно дна при движении на естественных и искусственных транспортных водных путях, может быть достигнуто за счет соответствующей обработки фазовых характеристик эхосигналов.
Общие признаки, совпадающие с заявляемым изобретением:
1) размещают на днище судна две ИПИА, состоящие из необходимого количества ЭАП, каждая из которых снабжен пьезоэлементом, узлами экранировки, гидро-, электро- и шумоизоляции;
2) обеспечивают работоспособность режимов излучения/приема каждого ЭАП за счет использования обратного/прямого пьезоэлектрических эффектов для пьезоэлемента простой геометрической формы (стержень, пластина, диск) с заданной резонансной частотой ;
3) регулируют пространственное расположение акустической оси обеих ИПИА до совпадения с нормалью относительно дна, что обеспечивает облучение сверху вниз УЗ энергией участка границы раздела «вода - дно» со случайным распределением донных неровностей через совокупности рассеивателей водной среды, в слоях которой они случайным образом и статистически неоднородно распределены, имея акустическое сопротивление , отличающееся от аналогичного параметра водной среды, и нейтральную плавучесть, вследствие чего совокупности рассеивателей пассивно переносятся водными массами с различными линейными скоростями течений относительно дна;
4) генерируют в излучающем тракте аппаратуры электрические колебания и преобразуют их в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму импульсов прямоугольной формы, а посылка содержит в себе несущую частоту ;
5) преобразуют электрические сигналы с помощью прямого пьезоэффекта пьезоэлементов ЭАП ИИА амплитудно-импульсных модулированных колебаний в периодические посылки УЗ волн с необходимой длительностью, обеспечивая передачу частицам водной среды акустической энергии за счет распространения колебаний с циклической частотой , что формирует за счет интерференции в водной среде УЗ пучок;
6) осуществляют акустические контакты с участками поверхностей совокупностей рассеивателей водной среды, в  слоях которой они случайным образом и статистически неоднородно распределены, имея акустическое сопротивление , отличающееся от аналогичного параметра водной среды, и нейтральную плавучесть, вследствие чего совокупности рассеивателей пассивно переносятся водными массами с различными линейными скоростями течений относительно дна, и границы раздела «вода - дно» со случайным распределением донных неровностей, причем эти участки поверхностей находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью
слоях которой они случайным образом и статистически неоднородно распределены, имея акустическое сопротивление , отличающееся от аналогичного параметра водной среды, и нейтральную плавучесть, вследствие чего совокупности рассеивателей пассивно переносятся водными массами с различными линейными скоростями течений относительно дна, и границы раздела «вода - дно» со случайным распределением донных неровностей, причем эти участки поверхностей находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью  судна, что обеспечивает формирование информационных сигналов - объемных реверберационных процессов и запаздывающих эхосигналов, квадраты огибающих которых будет содержать спектр частот, а их огибающие будет флуктуировать хаотическим образом;
судна, что обеспечивает формирование информационных сигналов - объемных реверберационных процессов и запаздывающих эхосигналов, квадраты огибающих которых будет содержать спектр частот, а их огибающие будет флуктуировать хаотическим образом;
7) преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА информационные сигналы, в частности, флуктуирующие по амплитуде эхосигналы от поверхностей разных участков границы раздела «вода - дно» со случайными и отличающимися друг от друга распределениями донных неровностей, причем эти участки поверхностей находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью  судна, в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
судна, в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
8) определяют в приемном тракте аппаратуры по мере движения судна по заданному курсу две медленно меняющиеся функции распределения глубин водоема, т.е. несовпадающие в данный момент времени зависимости электрических сигналов и , пропорциональные распределению глубин акватории под носовой и кормовой частями корпуса, причем эти функции идентичны друг другу, но сдвинуты во времени на величину ;
9) определяют величину коэффициента взаимной корреляции для несовпадающих в данный момент времени зависимостей электрических сигналов  и
и  , пропорциональных распределению глубин акватории под носовой и кормовой частями корпуса на пути движения судна, что позволяет вычислить скорость движения судна ;
, пропорциональных распределению глубин акватории под носовой и кормовой частями корпуса на пути движения судна, что позволяет вычислить скорость движения судна ;
10) отображают, регистрируют и документируют результаты измерений в аппаратуре.
К проблемам, вызванным общими недостатками прототипа и приведенных аналогов, можно отнести недостаточное соответствие эксплуатационным требованиям, в частности, невысокая угловая разрешающая способность и помехозащищенность при вертикальном зондировании как дна водоемов, так и водной толщи в условиях мелководья, при этом осуществляется обработка только амплитудных признаков эхосигналов основной частоты, в то время как для получения более полного объема первичных данных о тонкой структуре слоев неоднородной водной среды со случайно распределенными объемами рассеивателей необходимо дополнительно использовать и фазовые признаки.
Водная среда распространения обладает нелинейностью своих упругих свойств, что приводит к возникновению при распространении интенсивной УЗ волны различных нелинейных эффектов (см. Гидроакустическая энциклопедия. Под общ. ред. В.И.Тимошенко. - Таганрог, Издательство ТРТУ. 2000. с.438 - 441). Нелинейные эффекты в акустическом поле можно рассматривать как результат изменения свойств среды в области распространения мощного зондирующего сигнала накачки с частотой  , что приводит к искажению формы профиля волны конечной амплитуды при ее распространении к рассеивающей донной поверхности, т.е. генерации высших гармонических составляющих с частотами
, что приводит к искажению формы профиля волны конечной амплитуды при ее распространении к рассеивающей донной поверхности, т.е. генерации высших гармонических составляющих с частотами  , где
, где  - порядковый номер гармоники. Акустические поля сигналов высших гармоник обладают специфическими пространственными характеристиками: на акустической оси ИПИА изменение свойств среды под действием мощной волны накачки с частотой
- порядковый номер гармоники. Акустические поля сигналов высших гармоник обладают специфическими пространственными характеристиками: на акустической оси ИПИА изменение свойств среды под действием мощной волны накачки с частотой  происходит в наибольшей степени, в связи с чем угловая ширина основного лепестка ХН для каждой последующей гармоники меньше, а в направлениях дополнительных максимумов ХН на основной частоте
происходит в наибольшей степени, в связи с чем угловая ширина основного лепестка ХН для каждой последующей гармоники меньше, а в направлениях дополнительных максимумов ХН на основной частоте  изменение свойств среды происходит в гораздо меньшей степени, что приводит к снижению эффективности генерации гармоник в этих направлениях, т.е. уровень бокового поля ХН для каждой последующей гармоники меньше, чем у предыдущей (см. Т. Дж. Мюир. Нелинейная акустика и ее роль в геофизике морских осадков //Акустика морских осадков / Под ред. Ю. Ю. Житковского. - М.: Мир, 1977. - с. 245 - 250). Анализируя представленную в этом источнике информацию об угловых распределениях амплитуды звукового давления фазосвязанных сигналов кратных частот
изменение свойств среды происходит в гораздо меньшей степени, что приводит к снижению эффективности генерации гармоник в этих направлениях, т.е. уровень бокового поля ХН для каждой последующей гармоники меньше, чем у предыдущей (см. Т. Дж. Мюир. Нелинейная акустика и ее роль в геофизике морских осадков //Акустика морских осадков / Под ред. Ю. Ю. Житковского. - М.: Мир, 1977. - с. 245 - 250). Анализируя представленную в этом источнике информацию об угловых распределениях амплитуды звукового давления фазосвязанных сигналов кратных частот  можно сделать вывод о том, что с их использованием целесообразна разработка многочастотного корреляционного способа измерения скорости движения, при использовании которого возможно уточнение данных:
можно сделать вывод о том, что с их использованием целесообразна разработка многочастотного корреляционного способа измерения скорости движения, при использовании которого возможно уточнение данных:
- детальной структуры распределения глубин водоема в реальном масштабе времени на ходу судна-носителя аппаратуры,
- абсолютной (относительной) скорости движения судна-носителя,
- параметров течений в слоях тонкой структуры статистически неоднородной водной среды.
Таким образом технической проблемой для известных в уровне техники акустических способов измерения параметров течений статистически неоднородной водной среды является невозможность получения достоверной информации о параметрах течений в слоях тонкой структуры статистически неоднородной водной среды со случайно распределенными объемами рассеивателей.
Задачей данного изобретения является создание способа, позволяющего расширить эксплуатационные возможности корреляционного способа измерения скорости течений.
Технический результат изобретения заключается в повышении достоверности получения информации о параметрах течений в слоях тонкой структуры статистически неоднородной водной среды со случайно распределенными объемами рассеивателей, что позволяет получить новый объем первичных данных о подводной обстановке и добиться расширения эксплуатационных возможностей способа.
Заявляемый результат достигается тем, что в известный корреляционный гидроакустический способ измерения скорости течений, в котором:
- размещают на расстоянии в диаметральной плоскости судна, в носовой и кормовой частях днища две ИПИА эхолотных систем, которые состоят из необходимого количества ЭАП, каждый из которых снабжен пьезоэлементом, узлами экранировки, гидро-, электро- и шумоизоляции, причем обе ИПИА ориентированы акустическими осями вертикально вниз, имеют одинаковые волновые размеры, причем облучаемые УЗ области дна под носом и кормой судна не перекрываются;
- обеспечивают работоспособность режимов излучения/приема каждого ЭАП за счет использования обратного/прямого пьезоэлектрических эффектов для пьезоэлемента простой геометрической формы (стержень, пластина, диск) с заданной резонансной частотой ;
- генерируют в излучающем тракте аппаратуры электрические колебания, которые преобразуют в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму импульсов прямоугольной формы, а посылка содержит в себе несущую частоту ;
- преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА амплитудно-импульсные модулированные колебания в периодические посылки УЗ волн с заданной длительностью, обеспечивая передачу частицам водной среды акустической энергии за счет распространения колебаний с циклической частотой  и формируя за счет интерференции в водной среде под носовой и кормовой частями корпуса движущегося со скоростью
и формируя за счет интерференции в водной среде под носовой и кормовой частями корпуса движущегося со скоростью  судна УЗ облучающие пучки;
судна УЗ облучающие пучки;
- осуществляют акустические контакты с участками поверхностей - совокупностей рассеивателей водной среды, в 1, 2,…,, .., слоях которой они случайным образом и статистически неоднородно распределены, при этом каждая совокупность рассеивателей в любом из слоев обладает «уникальным» набором характеристик, в частности, на -том горизонте глубины - количество структурных элементов , их линейный размер , отражательная способность и акустическое сопротивление , отличающееся от аналогичного параметра водной среды, а также нейтральной плавучестью вследствие чего совокупности рассеивателей пассивно переносятся водными массами с различными линейными скоростями течений относительно дна,
- границы раздела «вода - дно» со случайным распределением донных неровностей, причем эти поверхности участков находятся в данный момент времени под носовой и кормовой ИПИА эхолотных систем, т.е. носовой (Н) и кормовой (К) частями движущегося судна со скоростью  относительно дна, что обеспечивает одновременное формирование двух пространственно-временных зависимостей информационных сигналов - объемных реверберационных процессов и запаздывающих эхосигналов, квадраты огибающих которых будет содержать спектр частот, а их огибающие будет флуктуировать хаотическим образом;
относительно дна, что обеспечивает одновременное формирование двух пространственно-временных зависимостей информационных сигналов - объемных реверберационных процессов и запаздывающих эхосигналов, квадраты огибающих которых будет содержать спектр частот, а их огибающие будет флуктуировать хаотическим образом;
- преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА движущегося со скоростью судна две пространственно-временные зависимости информационных сигналов, амплитуды эхосигналов от обоих облучаемых участков границы раздела «вода - дно» со случайными и различными распределениями донных неровностей, в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
- определяют по мере движения судна по заданному курсу две амплитудно-временные зависимости электрических сигналов  и
и  , визуализирующих акустические контакты с неровностями границы раздела «вода - дно», которые пропорциональны распределению глубин акватории под носовой и кормовой частями корпуса движущегося со скоростью судна, причем эти функции идентичны друг другу, но сдвинуты во времени на величину ;
, визуализирующих акустические контакты с неровностями границы раздела «вода - дно», которые пропорциональны распределению глубин акватории под носовой и кормовой частями корпуса движущегося со скоростью судна, причем эти функции идентичны друг другу, но сдвинуты во времени на величину ;
- определяют величину коэффициента взаимной корреляции для несовпадающих в данный момент времени зависимостей электрических сигналов и , пропорциональных распределению глубин акватории под носовой и кормовой частями корпуса по курсу движения судна, что позволяет вычислить скорость движения судна ;
- отображают, регистрируют и документируют результаты измерений в аппаратуре
дополнительно введены следующие операции
- задают для обеих ИПИА эхолотных систем критерий соответствия их волновых размеров интервалу значений

где  - диаметр антенны,
- диаметр антенны,  - длина волны УЗ с частотой
- длина волны УЗ с частотой  , распространяющегося со скоростью
, распространяющегося со скоростью  в воде,
в воде,  - амплитуда звукового давления в Паскалях у поверхности ИПИА в режиме излучения;
- амплитуда звукового давления в Паскалях у поверхности ИПИА в режиме излучения;
- генерируют с помощью излучающего тракта аппаратуры электрические колебания с частотой , поступающие на две ИПИА эхолотных систем в режиме излучения;
- преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП двух ИПИА эхолотных систем амплитудно-импульсные модулированные колебания в периодические посылки мощных УЗ волн с заданной длительностью, обеспечивая передачу частицам водной среды акустической энергии, достаточной для проявления нелинейных упругих свойств водной среды под носовой и кормовой частями корпуса движущегося со скоростью судна, что формирует в водной среде две параметрические излучающие антенны (ПИА), в объемах которых распределены нелинейные источники генерируемых спектральных компонент (самовоздействие);
- генерируют посредством обеих ПИА в водной среде два полигармонических пучка УЗ фазосвязанных сигналов с кратными частотами  , где
, где  - порядковый номер гармоники, акустические поля гармоник соосны, их волновые векторы ориентированы вертикально вниз, причем с ростом номера гармоники пучки имеют уменьшающиеся величины поперечного сечения;
- порядковый номер гармоники, акустические поля гармоник соосны, их волновые векторы ориентированы вертикально вниз, причем с ростом номера гармоники пучки имеют уменьшающиеся величины поперечного сечения;
- устанавливают на УЗ фазосвязанных сигналах с кратными частотами акустические контакты с участками поверхностей:
- совокупностей рассеивателей водной среды, в 1, 2,…,, ..., слоях которой они случайным образом и статистически неоднородно распределены, каждая совокупность рассеивателей в любом из слоев обладает «уникальным» набором характеристик, в частности, на -том горизонте глубины - количество структурных элементов , их линейный размер , отражательная способность и акустическое сопротивление ,
- границы раздела «вода - дно» со случайным распределением донных неровностей,
причем эти поверхности участков находятся в данный момент времени под носовой и кормовой ИПИА эхолотных систем, т.е. носовой (Н) и кормовой (К) частями движущегося судна со скоростью ( ) относительно
) относительно  -го слоя, что обеспечивает формирование
-го слоя, что обеспечивает формирование  носовых и кормовых информационных сигналов, которые несут как амплитудную, так и фазовую информацию об участках поверхностей, позволяя судить об их отражательной способности и акустическом сопротивлении, а также о их глубине нахождения;
носовых и кормовых информационных сигналов, которые несут как амплитудную, так и фазовую информацию об участках поверхностей, позволяя судить об их отражательной способности и акустическом сопротивлении, а также о их глубине нахождения;
15) преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА  носовых и кормовых информационных сигналов от
носовых и кормовых информационных сигналов от
участков поверхностей совокупностей рассеивателей водной среды, которые движутся с различными скоростями  течений на 1, 2,…,, .., горизонтах глубин и находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью (
течений на 1, 2,…,, .., горизонтах глубин и находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью ( ) судна относительно -го слоя,
) судна относительно -го слоя,
- и границы раздела «вода - дно» со случайным распределением донных неровностей,
в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
- осуществляют вертикальную пространственную стратификацию совокупностей рассеивателей водной среды на 1, 2,…,, .., горизонтов глубин, производя в приемных трактах эхолотных систем на фазосвязанных сигналах кратных частот  стробирование соответствующих электрических сигналов, установив одинаковые величины - ширины строба
стробирование соответствующих электрических сигналов, установив одинаковые величины - ширины строба  , их исходного расположения относительно дна, скорости и последовательности перемещения строба;
, их исходного расположения относительно дна, скорости и последовательности перемещения строба;
- вырабатывают в приемном тракте аппаратуры на каждом из фазосвязанных сигналов кратных частот по пар амплитудно-временных зависимостей электрических сигналов и , визуализирующих акустические контакты с неровностями границы раздела «вода - дно», которые пропорциональны распределению глубин акватории под носовой и кормовой частями корпуса движущегося со скоростью судна;
- измеряют для пар идентичных друг другу, но сдвинуты в парах во времени, амплитудно-временных зависимостей электрических сигналов и , величины  значений транспортных запаздываний
значений транспортных запаздываний  , что позволяет рассчитать значений скорости движения судна
, что позволяет рассчитать значений скорости движения судна  относительно дна;
относительно дна;
- вырабатывают в приемном тракте аппаратуры на каждом из фазосвязанных сигналов кратных частот по пар амплитудно-временных зависимостей электрических сигналов, визуализирующих акустические контакты с совокупностями рассеивателей, находящимися в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин, например, для -го горизонта глубины  и
и  , пропорциональных случайному распределению совокупностей рассеивателей в -том слое под носовой и кормовой частями корпуса движущегося со скоростью
, пропорциональных случайному распределению совокупностей рассеивателей в -том слое под носовой и кормовой частями корпуса движущегося со скоростью  судна относительно -го слоя (горизонта);
судна относительно -го слоя (горизонта);
- измеряют для пар идентичных друг другу, но сдвинутых в парах во времени амплитудно-временных зависимостей электрических сигналов, например, для -го горизонта глубины и , величины значений транспортных запаздываний  , измерив которые, рассчитывают значений скорости движения судна
, измерив которые, рассчитывают значений скорости движения судна  =
=
 относительно -го слоя (горизонта);
относительно -го слоя (горизонта);
- вычисляют значений скорости  течения в -том слое (горизонте глубин) как разность значений скоростей движения судна относительно -го слоя (горизонта глубин) и скоростей движения
течения в -том слое (горизонте глубин) как разность значений скоростей движения судна относительно -го слоя (горизонта глубин) и скоростей движения  судна относительно дна, где знак «+» соответствует попутному, знак «-» - встречному направлению течения в -том слое (горизонте глубины) водоема соответственно относительно вектора скорости движения судна;
судна относительно дна, где знак «+» соответствует попутному, знак «-» - встречному направлению течения в -том слое (горизонте глубины) водоема соответственно относительно вектора скорости движения судна;
- вырабатывают в приемном тракте аппаратуры на двух фазосвязанных сигналах кратных частот  по две амплитудно-временные зависимости электрических сигналов, визуализирующих акустические контакты и сопротивления совокупностей рассеивателей, находящихся в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин, например, для -го горизонта глубины
по две амплитудно-временные зависимости электрических сигналов, визуализирующих акустические контакты и сопротивления совокупностей рассеивателей, находящихся в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин, например, для -го горизонта глубины  и
и  , пропорциональных случайному распределению значения акустического сопротивления (мягкого или жесткого относительно водной среды) совокупностей рассеивателей в -том слое под носовой и кормовой частями корпуса движущегося со скоростью судна относительно -го слоя (горизонта);
, пропорциональных случайному распределению значения акустического сопротивления (мягкого или жесткого относительно водной среды) совокупностей рассеивателей в -том слое под носовой и кормовой частями корпуса движущегося со скоростью судна относительно -го слоя (горизонта);
- измеряют для двух идентичных друг другу, но сдвинутых в парах во времени амплитудно-временных зависимостей электрических сигналов, визуализирующих акустические контакты, и сопротивления совокупностей рассеивателей, например, для -го горизонта глубины и , величину значения транспортного запаздывания  , измерив которую, рассчитывают значение скорости движения судна
, измерив которую, рассчитывают значение скорости движения судна  =
=
 относительно -го слоя (горизонта);
относительно -го слоя (горизонта);
- определяют значения средних арифметических величин скоростей:
1)абсолютного движения судна, т.е. относительно дна,
2) относительного движения судна, т.е. относительно 1, 2,…,, .., слоев,
3) пассивного переноса совокупностей рассеивателей, находящихся в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин;
- осуществляют отображение, регистрацию и документирование результатов измерений в аппаратуре:
1) детальной структуры распределения глубин водоема в реальном масштабе времени на ходу судна-носителя аппаратуры,
2) абсолютной (относительной) скорости движения судна-носителя,
3) параметров течений в слоях тонкой структуры статистически неоднородной водной среды, который представлен в виде вертикального профиля скорости течения в k слоях стратифицированного водного объема, который спроецирован на диаметральную плоскость судна.
Предлагаемый способ поясняется следующими чертежами.
На фиг.1 показана структурная схема устройства, реализующего заявляемое изобретение;
на фиг.2 - схематично изображены зависимости величин электрических напряжений  , вырабатываемых приемными трактами носовой и кормовой эхолотных систем, от текущего времени
, вырабатываемых приемными трактами носовой и кормовой эхолотных систем, от текущего времени  на зондирующих сигналах кратных частот:
на зондирующих сигналах кратных частот:  -,
-,  , …..
, …..  , т.е. функции глубины моря (профили дна на спектральных компонентах полигармонического зондирующего сигнала);
, т.е. функции глубины моря (профили дна на спектральных компонентах полигармонического зондирующего сигнала);
на фиг.3. схематично изображены:
а) слой водного объема, содержащий совокупности рассеивателей - «акустически мягкую» (слева, насыщенный пузырьками газа планктон,  <
<  ), «акустически жесткую» (справа, насыщенный взвешенными частицами объем,
), «акустически жесткую» (справа, насыщенный взвешенными частицами объем,  >
>  ); б) зависимости видеоимпульсных информационных электрических сигналов
); б) зависимости видеоимпульсных информационных электрических сигналов  и
и  от времени t, пропорциональные распределению акустического сопротивления совокупностей рассеивателей в этом слое.
от времени t, пропорциональные распределению акустического сопротивления совокупностей рассеивателей в этом слое.
Реализующий предлагаемый способ многочастотный корреляционный гидроакустический лаг (фиг.1) функционально объединяет в себе две (нос и корма) эхолотовые системы (излучение, прием, отображение и регистрация информации), дополненные общими трактами: корреляционной обработки информации, измерения скорости судна, фазовой обработки и управления. Эхолотовые системы имеют общий тракт излучения: генератор 1 соединен через последовательно включенные хронизатор-модулятор 2, усилитель мощности 3 и коммутаторы 4 и 5 в режиме «Передача» с ИПИА 6 и 7 (корма и нос соответственно). Носовая 7 и кормовая 6 ИПИА размещены в диаметральной плоскости вдоль корпуса судна на расстоянии (база)  , ориентированы акустическими осями вертикально вниз к поверхности морского дна. УЗ эхоконтакты с разными, но принадлежащими одному маршруту следования, участками донной поверхности осуществляются через водную среду. Водная среда имеет неоднородную тонкую структуру, обладающую граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, скорость звука) для
, ориентированы акустическими осями вертикально вниз к поверхности морского дна. УЗ эхоконтакты с разными, но принадлежащими одному маршруту следования, участками донной поверхности осуществляются через водную среду. Водная среда имеет неоднородную тонкую структуру, обладающую граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, скорость звука) для  слоев совокупностей рассеивателей, которые случайным образом и статистически неоднородно распределены в водных объемах слоев (от 1 до k), имея различное акустическое сопротивление
слоев совокупностей рассеивателей, которые случайным образом и статистически неоднородно распределены в водных объемах слоев (от 1 до k), имея различное акустическое сопротивление  и нейтральную плавучесть, пассивно переносятся водными массами с различными линейными скоростями течений относительно дна. Эхолотовые системы имеют раздельные приемные тракты. ИПИА 6 через коммутатор 4 (корма) в режиме «Прием» соединена через
и нейтральную плавучесть, пассивно переносятся водными массами с различными линейными скоростями течений относительно дна. Эхолотовые системы имеют раздельные приемные тракты. ИПИА 6 через коммутатор 4 (корма) в режиме «Прием» соединена через  параллельно включенных цепочек из последовательно соединенных полосовых фильтров 8, 9, ….,10 (частоты
параллельно включенных цепочек из последовательно соединенных полосовых фильтров 8, 9, ….,10 (частоты  ), стробируемых усилителей 14, 15, …,16, амплитудных детекторов 20, 21, ...,22 с
), стробируемых усилителей 14, 15, …,16, амплитудных детекторов 20, 21, ...,22 с  -входовым аналоговым ключом 26, а ИПИА 7 через коммутатор 5 (нос) в режиме «Прием» соединена через
-входовым аналоговым ключом 26, а ИПИА 7 через коммутатор 5 (нос) в режиме «Прием» соединена через  параллельно включенных цепочек из последовательно соединенных полосовых фильтров 11, 12, ….,13 (частоты
параллельно включенных цепочек из последовательно соединенных полосовых фильтров 11, 12, ….,13 (частоты  ), стробируемых усилителей 17, 18, …,19, амплитудных детекторов 23, 24, …,25 с
), стробируемых усилителей 17, 18, …,19, амплитудных детекторов 23, 24, …,25 с  - входовым аналоговым ключом 27. В обеих эхолотовых системах предусмотрены тракты отображения и регистрации информации, для чего выходы
- входовым аналоговым ключом 27. В обеих эхолотовых системах предусмотрены тракты отображения и регистрации информации, для чего выходы  -входовых аналоговых ключей соединены со входами индикаторов и регистраторов: в кормовой эхолотной системе -
-входовых аналоговых ключей соединены со входами индикаторов и регистраторов: в кормовой эхолотной системе -  -входовый аналоговый ключ 26 - с индикатором 33 и регистратором 34, а в носовой эхолотной системе -
-входовый аналоговый ключ 26 - с индикатором 33 и регистратором 34, а в носовой эхолотной системе -  - входовый аналоговый ключ 27 - с индикатором 35 и регистратором 36. Приемные тракты эхолотовых систем подключены к общему тракту корреляционной обработки информации и измерения путевой скорости судна: выходы
- входовый аналоговый ключ 27 - с индикатором 35 и регистратором 36. Приемные тракты эхолотовых систем подключены к общему тракту корреляционной обработки информации и измерения путевой скорости судна: выходы  -входовых аналоговых ключей 26 и 27 соединены с двумя входами перемножающего устройства 29, причем аналоговый ключ 26 (корма) - через блок регулируемой задержки времени 28, управляющий вход которого соединен через экстремальный регулятор 32 с выходом интегратора 30 и входом измерительного прибора 31. Вход интегратора 30 соединен с выходом перемножающего устройства 29. Функционирование блоков эхолотовых систем определяется трактом управления: управляющие входы стробируемых усилителей 14, 15, …,16 и 17, 18, …,19, аналоговых ключей 26 и 27, индикаторов 33 и 35, регистраторов 34 и 36, хронизатора-модулятора 2 соединены с соответствующими выходами блока управления 37. Фазовая обработка осуществляется в приемных трактах обеих эхолотных систем. Так, в приемном тракте носовой (Н) эхолотной системы (фиг.1) после фильтрации (полосовой фильтр 11, частота
-входовых аналоговых ключей 26 и 27 соединены с двумя входами перемножающего устройства 29, причем аналоговый ключ 26 (корма) - через блок регулируемой задержки времени 28, управляющий вход которого соединен через экстремальный регулятор 32 с выходом интегратора 30 и входом измерительного прибора 31. Вход интегратора 30 соединен с выходом перемножающего устройства 29. Функционирование блоков эхолотовых систем определяется трактом управления: управляющие входы стробируемых усилителей 14, 15, …,16 и 17, 18, …,19, аналоговых ключей 26 и 27, индикаторов 33 и 35, регистраторов 34 и 36, хронизатора-модулятора 2 соединены с соответствующими выходами блока управления 37. Фазовая обработка осуществляется в приемных трактах обеих эхолотных систем. Так, в приемном тракте носовой (Н) эхолотной системы (фиг.1) после фильтрации (полосовой фильтр 11, частота  и полосовой фильтр 12, частота
и полосовой фильтр 12, частота  ) и усиления (усилитель 17, частота
) и усиления (усилитель 17, частота  и усилитель 18, частота
и усилитель 18, частота  ) выделяются - электрический сигнал
) выделяются - электрический сигнал  c частотой
c частотой  , который после удвоителя частоты 40 (
, который после удвоителя частоты 40 ( ) подают на первый вход фазового детектора 44, а также электрический сигнал
) подают на первый вход фазового детектора 44, а также электрический сигнал  с частотой
с частотой  через фазовращатель 42 подается на второй вход фазового детектора 44, выход которого соединен с дополнительным входом
через фазовращатель 42 подается на второй вход фазового детектора 44, выход которого соединен с дополнительным входом  -входового аналогового ключа 27. Выход
-входового аналогового ключа 27. Выход  -входового аналогового ключа 27 соединен как с индикатором 35, так и с регистратором 36, а также через блок регулируемой задержки времени 28 с первым входом перемножителя 29. На управляющий вход фазовращателя 42 подается электрический сигнал с соответствующего выхода блока формирования управляющих напряжений 38, который запускается синхроимпульсом с дополнительного выхода блока управления 37. Характеристики разнополярного электрического сигнала
-входового аналогового ключа 27 соединен как с индикатором 35, так и с регистратором 36, а также через блок регулируемой задержки времени 28 с первым входом перемножителя 29. На управляющий вход фазовращателя 42 подается электрический сигнал с соответствующего выхода блока формирования управляющих напряжений 38, который запускается синхроимпульсом с дополнительного выхода блока управления 37. Характеристики разнополярного электрического сигнала  , формируемого на выходе фазового детектора 44 и подаваемого через блок регулируемой задержки времени 28 на первый вход перемножителя 29, пропорциональны изменению такого информативного параметра облучаемых участков совокупностей рассеивателей, находящихся в выделенном слое на заданном горизонте глубины под носовой эхолотной системой на трассе движения судна, как акустическое сопротивление совокупностей рассеивателей, причем при лоцировании «акустически мягких» а (насыщенный пузырьками газа планктон, < ) сигнал будет иметь отрицательную полярность, а для «акустически жесткой» (насыщенный взвешенными частицами объем, > ) - положительную, а для областей с промежуточными значениями акустического сопротивления электрический сигнал будет иметь флюктуирующую амплитуду и полярность. Фазовая обработка в приемном тракте кормовой (К) эхолотной системы осуществляется аналогичным образом: - после фильтрации (полосовой фильтр 8, частота
, формируемого на выходе фазового детектора 44 и подаваемого через блок регулируемой задержки времени 28 на первый вход перемножителя 29, пропорциональны изменению такого информативного параметра облучаемых участков совокупностей рассеивателей, находящихся в выделенном слое на заданном горизонте глубины под носовой эхолотной системой на трассе движения судна, как акустическое сопротивление совокупностей рассеивателей, причем при лоцировании «акустически мягких» а (насыщенный пузырьками газа планктон, < ) сигнал будет иметь отрицательную полярность, а для «акустически жесткой» (насыщенный взвешенными частицами объем, > ) - положительную, а для областей с промежуточными значениями акустического сопротивления электрический сигнал будет иметь флюктуирующую амплитуду и полярность. Фазовая обработка в приемном тракте кормовой (К) эхолотной системы осуществляется аналогичным образом: - после фильтрации (полосовой фильтр 8, частота  и полосовой фильтр 9, частота
и полосовой фильтр 9, частота  ) и усиления (усилитель 14, частота
) и усиления (усилитель 14, частота  и усилитель 15, частота
и усилитель 15, частота  ) выделяются - электрический сигнал
) выделяются - электрический сигнал  c частотой
c частотой  , который после удвоителя частоты 39 (
, который после удвоителя частоты 39 ( ) подают на первый вход фазового детектора 43, а также электрический сигнал
) подают на первый вход фазового детектора 43, а также электрический сигнал  с частотой
с частотой  через фазовращатель 41 подается на второй вход фазового детектора 43, выход которого соединен с дополнительным входом
через фазовращатель 41 подается на второй вход фазового детектора 43, выход которого соединен с дополнительным входом  -входового аналогового ключа 26. Выход
-входового аналогового ключа 26. Выход  -входового аналогового ключа 26 соединен с индикатором 33 и с регистратором 34, а также со вторым входом перемножителя 29. На второй вход перемножителя 29 поступает разнополярный электрический сигнал
-входового аналогового ключа 26 соединен с индикатором 33 и с регистратором 34, а также со вторым входом перемножителя 29. На второй вход перемножителя 29 поступает разнополярный электрический сигнал  , формируемый на выходе фазового детектора 43, который пропорционален изменению такого информативного параметра облучаемых участков совокупностей рассеивателей, находящихся под кормовой эхолотной системой на трассе движения судна, как акустическое сопротивление. Отметим, что электрический сигнал
, формируемый на выходе фазового детектора 43, который пропорционален изменению такого информативного параметра облучаемых участков совокупностей рассеивателей, находящихся под кормовой эхолотной системой на трассе движения судна, как акустическое сопротивление. Отметим, что электрический сигнал  , формируемый на выходе фазового детектора 44 кормовой эхолотной системой на трассе движения судна, будет запаздывать на промежуток времени
, формируемый на выходе фазового детектора 44 кормовой эхолотной системой на трассе движения судна, будет запаздывать на промежуток времени  относительно электрического сигнала
относительно электрического сигнала  , уже сформированного на выходе фазового детектора 43 носовой эхолотной системой на трассе движения судна. Таким образом, по мере движения судна по заданному курсу непрерывно определяются две амплитудно-временные зависимости электрических сигналов
, уже сформированного на выходе фазового детектора 43 носовой эхолотной системой на трассе движения судна. Таким образом, по мере движения судна по заданному курсу непрерывно определяются две амплитудно-временные зависимости электрических сигналов  и
и  , визуализирующих акустические контакты и сопротивления совокупностей рассеивателей, находящихся в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин, например, для -го горизонта глубины и , пропорциональных случайному распределению значения акустического сопротивления (мягкого или жесткого относительно водной среды) совокупностей рассеивателей в -том слое под носовой и кормовой частями корпуса движущегося со скоростью судна относительно -го слоя (горизонта).
, визуализирующих акустические контакты и сопротивления совокупностей рассеивателей, находящихся в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин, например, для -го горизонта глубины и , пропорциональных случайному распределению значения акустического сопротивления (мягкого или жесткого относительно водной среды) совокупностей рассеивателей в -том слое под носовой и кормовой частями корпуса движущегося со скоростью судна относительно -го слоя (горизонта).
Заявляемый способ с помощью многочастотного корреляционного гидроакустического лага, реализующего предлагаемый способ, происходит следующим образом.
Генератор 1 излучающего тракта эхолотных систем вырабатывает электрический сигнал  с частотой
с частотой  , поступающий на вход хронизатора-модулятора 2, приводящегося в рабочее состояние оператором по команде с блока управления 37, в результате чего на выходе хронизатора-модулятора 2 получаем радиоимпульс
, поступающий на вход хронизатора-модулятора 2, приводящегося в рабочее состояние оператором по команде с блока управления 37, в результате чего на выходе хронизатора-модулятора 2 получаем радиоимпульс  с гармоническим заполнением. После усилителя мощности 3 радиоимпульс
с гармоническим заполнением. После усилителя мощности 3 радиоимпульс  поступает через коммутаторы 5 и 4 в режиме «Передача» на ИПИА 7 и 6 (нос и корма соответственно), излучающие мощные (в соответствии с соотношением (2)) зондирующие УЗ сигналы в водную среду, обладающую нелинейностью своих
поступает через коммутаторы 5 и 4 в режиме «Передача» на ИПИА 7 и 6 (нос и корма соответственно), излучающие мощные (в соответствии с соотношением (2)) зондирующие УЗ сигналы в водную среду, обладающую нелинейностью своих  упругих характеристик. Носовая 7 и кормовая 6 ИПИА эхолотных систем размещены в диаметральной плоскости вдоль корпуса судна на расстоянии
упругих характеристик. Носовая 7 и кормовая 6 ИПИА эхолотных систем размещены в диаметральной плоскости вдоль корпуса судна на расстоянии  и ориентированы акустическими осями вертикально вниз (фиг.1), причем их ХН должны иметь такую остроту направленного действия, чтобы облучаемые области дна не перекрывались.
и ориентированы акустическими осями вертикально вниз (фиг.1), причем их ХН должны иметь такую остроту направленного действия, чтобы облучаемые области дна не перекрывались.
Отметим, что носовая 7 и кормовая 6 ИПИА эхолотных систем обеспечивают формирование и прием волновых процессов в водной среде, т.к. именно УЗ является эффективным для передачи и получения информации в водной среде, причем проектирование данного многочастотного корреляционного способа измерения параметров водной среды обусловливает существенное увеличение мощностей излучаемых волн. В данных условиях начинает меняться роль гидроакустического канала как звукопроводящей среды - от «линейной» акустики, в рамках которой изменение плотности воды еще линейно зависит от изменения звукового давления распространяющегося волнового процесса, что обусловливает выполнение принципа суперпозиции до «нелинейной» акустики, где начинает проявляться нелинейность ее упругих свойств, вызывающая как самовоздействие, так и взаимодействие распространяющихся волн конечной амплитуды, приводя к генерации новых спектральных компонент комбинационных частот. Следует учитывать, что все процессы, приводящие к уменьшению плотности потока акустической энергии - диссипативные, дифракционные и т.д. ослабляют нелинейные явления, что делает актуальным прояснение области значений нелинейного режима как для ЭАП носовой 7 и кормовой 6 ИПИА эхолотных систем, так и излучаемых мощных волн. Ниже обсудим критерий соответствия (6) волновых размеров для ЭАП обеих 6, 7 ИПИА эхолотных систем интервалу значений 10 <  <
<  , что обеспечивает работоспособность многочастотного корреляционного гидроакустического лага, в котором реализуется предлагаемый способ.
, что обеспечивает работоспособность многочастотного корреляционного гидроакустического лага, в котором реализуется предлагаемый способ.
В нелинейной акустике принято оценивать относительное влияние диссипативных, дифракционных и нелинейных эффектов на мощные излучаемые волны, рассчитав безразмерные величины: параметр Хохлова  , число Рейнольдса
, число Рейнольдса  или параметр
или параметр  (см. Новиков Б. К., Руденко О. В., Тимошенко В. И. Нелинейная гидроакустика. - Л.: Судостроение, 1981. - 264 с., стр.13-14, 100 -102, Зарембо Л.К., Красильников В.А. Введение в нелинейную акустику. - М.: Изд-во «Наука», 1966. - 520 с., стр. 98 -110) для конкретного ЭАП с использованием соотношений:
(см. Новиков Б. К., Руденко О. В., Тимошенко В. И. Нелинейная гидроакустика. - Л.: Судостроение, 1981. - 264 с., стр.13-14, 100 -102, Зарембо Л.К., Красильников В.А. Введение в нелинейную акустику. - М.: Изд-во «Наука», 1966. - 520 с., стр. 98 -110) для конкретного ЭАП с использованием соотношений:

-расстояние разрыва плоской волны с частотой  (рад/с) и амплитудой звукового давления
(рад/с) и амплитудой звукового давления  (Па) у поверхности ЭАП, м;
(Па) у поверхности ЭАП, м;

- длина области дифракции Френеля для волны накачки с частотой  (рад/с), м;
(рад/с), м;

- расстояние затухания акустической волны, м. Коэффициент затухания  (Нп/м) акустического сигнала с частотой
(Нп/м) акустического сигнала с частотой 
 в морской воде рассчитывать по соотношениям Шихи и Хелли, а также Либермана (см. Новиков Б. К., Руденко О. В., Тимошенко В. И. Нелинейная гидроакустика. - Л.: Судостроение, 1981. - 264 с., стр.23-26). Для пресной воды коэффициент затухания
в морской воде рассчитывать по соотношениям Шихи и Хелли, а также Либермана (см. Новиков Б. К., Руденко О. В., Тимошенко В. И. Нелинейная гидроакустика. - Л.: Судостроение, 1981. - 264 с., стр.23-26). Для пресной воды коэффициент затухания  (Нп/м) связан с частотой
(Нп/м) связан с частотой  (1/с) следующим уравнением:
(1/с) следующим уравнением:  (см. Яковлев А.Н., Каблов Г.П. Гидролокаторы ближнего действия. - Л.:Судостроение, 1983.-200с., стр.7-9)
(см. Яковлев А.Н., Каблов Г.П. Гидролокаторы ближнего действия. - Л.:Судостроение, 1983.-200с., стр.7-9)

амплитуда звукового давления сигнала накачки у поверхности ЭАП, Па. Здесь: 
амплитуда звукового давления сигнала накачки, приведенного к расстоянию 1 метр от ЭАП с учетом затухания.
Приближенно оценивать предельные значения амплитуд звукового давления накачки, при которых начинают проявляться нелинейные эффекты, предложено (см Новиков Б. К., Руденко О. В., Тимошенко В. И. Нелинейная гидроакустика. - Л.: Судостроение, 1981. - 264 с., стр.248-252) следующим образом. Образование разрывов для плоских волн характеризуется величиной параметра  отсюда соответствующая амплитуда звукового давления у поверхности ЭАП равна
отсюда соответствующая амплитуда звукового давления у поверхности ЭАП равна

где  - диссипативный коэффициент среды. Но так как дифракционные явления значительно ослабляют нелинейные эффекты, то для ограниченных пучков накачки при этих значениях
- диссипативный коэффициент среды. Но так как дифракционные явления значительно ослабляют нелинейные эффекты, то для ограниченных пучков накачки при этих значениях  разрыв может и не наступить. Тогда, пренебрегая нелинейным затуханием волны накачки и полагая
разрыв может и не наступить. Тогда, пренебрегая нелинейным затуханием волны накачки и полагая  , предельные уровни амплитуд звукового давления рассчитывают по формуле
, предельные уровни амплитуд звукового давления рассчитывают по формуле

Таким образом, амплитуда звукового давления  у поверхности ЭАП для каждого из сигналов накачки ПИА заключена в пределах, определяемых в соответствии с (8) и (9). Соотношение (9) с учетом того, что диаметр ИПИА
у поверхности ЭАП для каждого из сигналов накачки ПИА заключена в пределах, определяемых в соответствии с (8) и (9). Соотношение (9) с учетом того, что диаметр ИПИА  ,
,  и частота
и частота  , можно преобразовать и представить в виде
, можно преобразовать и представить в виде

что ограничивает сверху величину волнового размера ЭАП для ИПИА 7 и 6 (нос и корма соответственно) эхолотных систем, причем нижнюю границу ( ) можно установить из результатов экспериментов (см Новиков Б. К., Руденко О. В., Тимошенко В. И. Нелинейная гидроакустика. - Л.: Судостроение, 1981. - 264 с., стр.161-165,171-179,182-188).
) можно установить из результатов экспериментов (см Новиков Б. К., Руденко О. В., Тимошенко В. И. Нелинейная гидроакустика. - Л.: Судостроение, 1981. - 264 с., стр.161-165,171-179,182-188).
Проведем анализ типичных результатов экспериментальных измерений пространственных характеристик акустических сигналов кратных частот, полученных при реализации «линейного» и «нелинейного» режимов излучения мощного одночастотного сигнала накачки, например, для ЭАП ИПИА рыбопоисковой аппаратуры гидролокатора «Таймень-М» в режиме самовоздействия (см. Волощенко В.Ю., Волощенко А.П. Параметрические гидроакустические средства ближнего подводного наблюдения. Южный федеральный университет. - Ростов-на-Дону; Таганрог: Изд-во ЮФУ, 2018.-176 с., стр.29-42). Так, для ИПИА РПА «Таймень-М» представлены несколько угловых распределений амплитуд звуковых давлений для акустических сигналов кратных частот, полученные в двух режимах:
1) ( )- «линейный», соответствующий непосредственному возбуждению ЭАП антенны на частотах
)- «линейный», соответствующий непосредственному возбуждению ЭАП антенны на частотах  =50 кГц (
=50 кГц ( ),
),  =100 кГц (
=100 кГц ( ),
),  =150 кГц (
=150 кГц ( );
);
2) ( ) - «нелинейный», соответствующий штатному режиму возбуждения ЭАП антенны РПА на частоте
) - «нелинейный», соответствующий штатному режиму возбуждения ЭАП антенны РПА на частоте  =50 кГц (
=50 кГц ( ), что приводит к генерации в водной среде высших гармоник
), что приводит к генерации в водной среде высших гармоник  (
( ).
).
Итак, ИПИА гидролокатора «Таймень-М» имеет: в «нелинейном» режиме - на частоте  =50 кГц угловую ширину основного лепестка ХН по уровню 0,7
=50 кГц угловую ширину основного лепестка ХН по уровню 0,7  =14,4° и уровень бокового излучения
=14,4° и уровень бокового излучения  =(-19 дБ); на частоте
=(-19 дБ); на частоте  = 100 кГц -
= 100 кГц -  =10,8° и
=10,8° и  = (- 23 дБ); на частоте
= (- 23 дБ); на частоте  = 150 кГц -
= 150 кГц -  =8,1° и
=8,1° и  = (-23 дБ);
= (-23 дБ);
в «линейном» режиме непосредственного возбуждения - на частоте  =50 кГц угловую ширину основного лепестка ХН по уровню 0,7
=50 кГц угловую ширину основного лепестка ХН по уровню 0,7  = 14,4° и уровень бокового излучения
= 14,4° и уровень бокового излучения  = (-19 дБ); на частоте
= (-19 дБ); на частоте  = 100 кГц -
= 100 кГц -  = 7,2° и
= 7,2° и  = (-19 дБ); на частоте
= (-19 дБ); на частоте  = 150 кГц -
= 150 кГц -  = 4,8° и
= 4,8° и  = (-18 дБ).
= (-18 дБ).
Из представленных данных видно, что в «линейном» случае на всех частотах УЗ уровень бокового поля ХН практически не изменяется (-18 дБ), а угловая ширина основного лепестка ХН уменьшается в соответствии с известными закономерностями - (14,4°, 7,2°, 4,8°) - (см. А.П. Евтютов, В.Б. Митько Инженерные расчеты в гидроакустике. - 2-е изд., перераб. и доп. - Л.:Судостроение, 1988. с.17-27), в «нелинейном» режиме мощный акустический сигнал наиболее заметно меняет упругие свойства водной среды именно на оси антенны, что и приводит к существенному ослаблению бокового поля -от (-18 дБ) до (-23 дБ) - и постепенному обострению основного лепестка - (14,4°, 10,8°, 8,1°), причем применение «нелинейного режима» существенно расширяет рабочий диапазон устройства, реализующего предлагаемый способ.
Анализируя представленную выше информацию о локационных сигналах кратных частот , можно сделать вывод о том, что целесообразно применение носовой 7 и кормовой 6 ИПИА эхолотных систем комплексно - «нелинейный режим» - формирование волновых процессов в водной среде, -«линейный режим» - прием отраженных сигналов, что расширит эксплуатационные возможности известного корреляционного способа, обеспечив , в частности, получение достоверной информации о параметрах течений в слоях тонкой структуры статистически неоднородной водной среды со случайно распределенными объемами рассеивателей.
Водная среда имеет неоднородную тонкую структуру, обладающую граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, скорость звука) для i слоев рассеивателей, которые случайным образом и статистически неоднородно распределены в водных объемах слоев (от 1 до k), имея различное акустическое сопротивление и нейтральную плавучесть, и пассивно переносятся водными массами с различными линейными скоростями течений относительно дна (см. Майкл С. Грегг. Микроструктура океана //Наука об океане / Под ред. О. И. Мамаева. - М.: Изд-во «Прогресс», 1983. - с. 219- 243). Полигармонический зондирующий УЗ сигнал, содержащий спектральные составляющие с частотами  , распространяется в среде лоцирования, имеющей акустическое сопротивление (
, распространяется в среде лоцирования, имеющей акустическое сопротивление ( ), где
), где  - плотность среды,
- плотность среды,  - скорость звука в ней, достигает расположенных в среде подвижных (слои рассеивателей с акустическим сопротивлением , формирующие сигнал объемной реверберации) и покоящихся (дно) относительно нее объектов с акустическим сопротивлением (
- скорость звука в ней, достигает расположенных в среде подвижных (слои рассеивателей с акустическим сопротивлением , формирующие сигнал объемной реверберации) и покоящихся (дно) относительно нее объектов с акустическим сопротивлением ( )≠(
)≠( ) и отражается от них. Амплитуды отраженных УЗ волн, несущих информацию об объектах, определяются их рассеивающими (отражающими) свойствами, которые определяются формой объектов, ракурсом облучения, волновыми размерами. Отраженные спектральные компоненты полигармонического УЗ сигнала в силу малости амплитуд возмущений при обратном распространении подчиняются законам «линейной» акустики, достигают ИПИА 7 и 6 (нос и корма соответственно) эхолотных систем, преобразуются их ЭАП в соответствующие электрические, причем полигармонические электрические сигналы
) и отражается от них. Амплитуды отраженных УЗ волн, несущих информацию об объектах, определяются их рассеивающими (отражающими) свойствами, которые определяются формой объектов, ракурсом облучения, волновыми размерами. Отраженные спектральные компоненты полигармонического УЗ сигнала в силу малости амплитуд возмущений при обратном распространении подчиняются законам «линейной» акустики, достигают ИПИА 7 и 6 (нос и корма соответственно) эхолотных систем, преобразуются их ЭАП в соответствующие электрические, причем полигармонические электрические сигналы  несут определенную амплитудную информацию о границах раздела, позволяют судить об их отражательной способности в широкой полосе частот (
несут определенную амплитудную информацию о границах раздела, позволяют судить об их отражательной способности в широкой полосе частот ( ), а также и об их удалении от ИПИА 7 и 6. Таким образом, при движении судна со скоростью
), а также и об их удалении от ИПИА 7 и 6. Таким образом, при движении судна со скоростью  с помощью обеих эхолотных систем на различных спектральных компонентах
с помощью обеих эхолотных систем на различных спектральных компонентах  отраженного полигармонического сигнала можно зафиксировать с различной разрешающей способностью детали подробных профилей облученных участков поверхностей совокупностей рассеивателей водной среды, в слоях которой они случайным образом и статистически неоднородно распределены. Следует учесть, что каждая совокупность рассеивателей в любом из слоев обладает «уникальным» набором характеристик, в частности, на -том горизонте глубины -количество структурных элементов , их линейный размер , отражательная способность и акустическое сопротивление . Как видно из фиг.1, эти -тые участки поверхностей совокупностей рассеивателей в слоях водной среды находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью () судна относительно -го слоя, что обеспечивает формирование носовых и кормовых информационных сигналов, в частности, объемных реверберационных процессов, огибающие которых флуктуируют хаотическим образом, а также -тых участков поверхности морского дна, находящихся на общем маршруте следования.
отраженного полигармонического сигнала можно зафиксировать с различной разрешающей способностью детали подробных профилей облученных участков поверхностей совокупностей рассеивателей водной среды, в слоях которой они случайным образом и статистически неоднородно распределены. Следует учесть, что каждая совокупность рассеивателей в любом из слоев обладает «уникальным» набором характеристик, в частности, на -том горизонте глубины -количество структурных элементов , их линейный размер , отражательная способность и акустическое сопротивление . Как видно из фиг.1, эти -тые участки поверхностей совокупностей рассеивателей в слоях водной среды находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью () судна относительно -го слоя, что обеспечивает формирование носовых и кормовых информационных сигналов, в частности, объемных реверберационных процессов, огибающие которых флуктуируют хаотическим образом, а также -тых участков поверхности морского дна, находящихся на общем маршруте следования.
С этой целью в приемных трактах носовой и кормовой эхолотных систем движущегося судна осуществляется соответствующая обработка сигналов  по команде оператора через блок управления 37. В результате этого на выходе приемного тракта носовой эхолотной системы после фильтрации (полосовые фильтры 11 (
по команде оператора через блок управления 37. В результате этого на выходе приемного тракта носовой эхолотной системы после фильтрации (полосовые фильтры 11 ( ), 12 (
), 12 ( ),…13 (
),…13 ( )), стробирования и усиления (стробируемые усилители 17, 18, …19), детектирования (детекторы 23, 24,…25) и соответствующего переключения
)), стробирования и усиления (стробируемые усилители 17, 18, …19), детектирования (детекторы 23, 24,…25) и соответствующего переключения  -входового аналогового ключа 27 выделяется видеоимпульсный электрический сигнал
-входового аналогового ключа 27 выделяется видеоимпульсный электрический сигнал  , соответствующий эхосигналу какой-либо одной выбранной оператором в качестве рабочей спектральной компоненты из набора частот
, соответствующий эхосигналу какой-либо одной выбранной оператором в качестве рабочей спектральной компоненты из набора частот  ,
,  ,
, ….,
….,  от облучаемых поверхностей слоев рассеивателей, а также морского дна, находящихся под носовой частью корпуса судна. Видеоимпульсный электрический сигнал
от облучаемых поверхностей слоев рассеивателей, а также морского дна, находящихся под носовой частью корпуса судна. Видеоимпульсный электрический сигнал  подается в тракт отображения и регистрации информации - на входы индикатора 35 и регистратора 36, запускаемые подачей синхроимпульса с выхода блока управления 37. Аналогично, на выходе приемного тракта кормовой эхолотной системы после фильтрации (полосовые фильтры 8 (
подается в тракт отображения и регистрации информации - на входы индикатора 35 и регистратора 36, запускаемые подачей синхроимпульса с выхода блока управления 37. Аналогично, на выходе приемного тракта кормовой эхолотной системы после фильтрации (полосовые фильтры 8 ( ), 9 (
), 9 ( ),…10 (
),…10 ( )), стробирования и усиления (стробируемые усилители 14, 15, …16), детектирования (детекторы 20, 21,…22) и соответствующего переключения
)), стробирования и усиления (стробируемые усилители 14, 15, …16), детектирования (детекторы 20, 21,…22) и соответствующего переключения  -входового аналогового ключа 26 выделяется видеоимпульсный электрический сигнал
-входового аналогового ключа 26 выделяется видеоимпульсный электрический сигнал  , соответствующий эхосигналу какой-либо одной выбранной оператором в качестве рабочей спектральной компоненты из набора частот
, соответствующий эхосигналу какой-либо одной выбранной оператором в качестве рабочей спектральной компоненты из набора частот  ,
,  ,
, ….,
….,  от облучаемых поверхностей слоев рассеивателей, а также морского дна, находящихся под кормовой частью корпуса судна. Видеоимпульсный электрический сигнал
от облучаемых поверхностей слоев рассеивателей, а также морского дна, находящихся под кормовой частью корпуса судна. Видеоимпульсный электрический сигнал  подается в тракт отображения и регистрации информации - на входы индикатора 33 и регистратора 34, запускаемые подачей синхроимпульса с выхода блока управления 37. На фиг.2 схематично изображены зависимости величин электрических напряжений , вырабатываемых приемными трактами носовой и кормовой эхолотных систем, от текущего времени на зондирующих сигналах кратных частот: -, , ….. , т.е. функции глубины моря соответствующие его рельефу, что видно из сопоставления фиг.1 и фиг.2 (эхограммы дна на трассе движения судна, зарегистрированных на спектральных компонентах полигармонического зондирующего сигнала),
подается в тракт отображения и регистрации информации - на входы индикатора 33 и регистратора 34, запускаемые подачей синхроимпульса с выхода блока управления 37. На фиг.2 схематично изображены зависимости величин электрических напряжений , вырабатываемых приемными трактами носовой и кормовой эхолотных систем, от текущего времени на зондирующих сигналах кратных частот: -, , ….. , т.е. функции глубины моря соответствующие его рельефу, что видно из сопоставления фиг.1 и фиг.2 (эхограммы дна на трассе движения судна, зарегистрированных на спектральных компонентах полигармонического зондирующего сигнала),
В качестве примера рассмотрим влияние на характер записи рельефа морского дна угловой ширины основного лепестка ХН, так и уровня бокового излучения ИПИА эхолотной системы, в частности, в нашем случае - результирующей остроты направленного действия  приемоизлучающей антенны, где
приемоизлучающей антенны, где  . Так, полученное изображения рельефа дна на эхограмме в основном соответствует действительному рельефу, однако, неровности дна (впадины и возвышенности) получаются сглаженными. При прохождении носа судна над впадиной (фиг.1) ее склоны облучает полигармонический зондирующий ультразвуковой сигнал, содержащий сформировавшиеся в нелинейной водной среде спектральные составляющие с частотами
. Так, полученное изображения рельефа дна на эхограмме в основном соответствует действительному рельефу, однако, неровности дна (впадины и возвышенности) получаются сглаженными. При прохождении носа судна над впадиной (фиг.1) ее склоны облучает полигармонический зондирующий ультразвуковой сигнал, содержащий сформировавшиеся в нелинейной водной среде спектральные составляющие с частотами  , на которых ИПИА 7 в режиме излучения имеет разную остроту направленного действия
, на которых ИПИА 7 в режиме излучения имеет разную остроту направленного действия  (нелинейный режим). Следует отметить, что острота направленного действия той же ИПИА 7 в режиме приема более высокочастотной компоненты также возрастает:
(нелинейный режим). Следует отметить, что острота направленного действия той же ИПИА 7 в режиме приема более высокочастотной компоненты также возрастает:  (линейный режим). Таким образом, формирование результирующей ХН ИПИА антенны 7 для каждой спектральной компоненты имеет свои особенности, обусловленные перемножением ее ХН по давлению в обоих режимах: ослабление уровня бокового излучения, более медленное уменьшение угловой ширины основного лепестка ХН, причем
(линейный режим). Таким образом, формирование результирующей ХН ИПИА антенны 7 для каждой спектральной компоненты имеет свои особенности, обусловленные перемножением ее ХН по давлению в обоих режимах: ослабление уровня бокового излучения, более медленное уменьшение угловой ширины основного лепестка ХН, причем  . Как следует из фиг.1 сигналы различных спектральных компонент отражаются от различных по площади участков поверхности впадины, в результате чего возвращаются к ИПИА 7 неодновременно, что приводит к удлинению эхосигналов, а также регистрации на эхограмме первыми отраженных сигналов, пришедших от ближайших к приемнику точек поверхности впадины. Таким образом, изображение рельефа впадины (возвышенности) на эхограмме представляет собой геометрическое место точек на горизонтальной проекции облученной площади углубления (возвышенности) морского дна, находящихся на кратчайшем расстоянии от ИПИА 7 при различных положениях носа судна относительно впадины (см. Логинов К.В. Электронавигационные и рыбопоисковые приборы. - М.: Легкая и пищевая пром-сть, 1983, с.292-296). Как видно из графических построений, степень искажения профиля впадин и возвышенностей дна на эхограмме уменьшается для более высокочастотных спектральных компонент (фиг.2). Маскировка реального рельефа морского дна по пути следования судна обусловлена сферичностью волнового фронта УЗ сигналов, вследствие чего возникает неопределенность в оценке фактической глубины и неровности на полученной эхограмме изображаются сглаженными. В том случае, если измерение глубин производится на акваториях с большими уклонами дна, индикатор и регистратор эхолота будут фиксировать глубины меньше фактической, так как их срабатывание обусловлено приходом первого эхосигнала, соответствующего кратчайшему расстоянию между ИПИА и дном, что обусловливает наличие в практике измерений соответствующих поправок. В частности, если α - угол наклона дна больше, чем угловая ширина основного лепестка ХН
. Как следует из фиг.1 сигналы различных спектральных компонент отражаются от различных по площади участков поверхности впадины, в результате чего возвращаются к ИПИА 7 неодновременно, что приводит к удлинению эхосигналов, а также регистрации на эхограмме первыми отраженных сигналов, пришедших от ближайших к приемнику точек поверхности впадины. Таким образом, изображение рельефа впадины (возвышенности) на эхограмме представляет собой геометрическое место точек на горизонтальной проекции облученной площади углубления (возвышенности) морского дна, находящихся на кратчайшем расстоянии от ИПИА 7 при различных положениях носа судна относительно впадины (см. Логинов К.В. Электронавигационные и рыбопоисковые приборы. - М.: Легкая и пищевая пром-сть, 1983, с.292-296). Как видно из графических построений, степень искажения профиля впадин и возвышенностей дна на эхограмме уменьшается для более высокочастотных спектральных компонент (фиг.2). Маскировка реального рельефа морского дна по пути следования судна обусловлена сферичностью волнового фронта УЗ сигналов, вследствие чего возникает неопределенность в оценке фактической глубины и неровности на полученной эхограмме изображаются сглаженными. В том случае, если измерение глубин производится на акваториях с большими уклонами дна, индикатор и регистратор эхолота будут фиксировать глубины меньше фактической, так как их срабатывание обусловлено приходом первого эхосигнала, соответствующего кратчайшему расстоянию между ИПИА и дном, что обусловливает наличие в практике измерений соответствующих поправок. В частности, если α - угол наклона дна больше, чем угловая ширина основного лепестка ХН  по уровню 0,7, то первым к антенне придет эхосигнал, распространяющийся по направлению перпендикулярному к наклонному участку дна, и поправка на уклон дна определится по формуле (см. Судовые эхолоты / А.А.Хребтов и др.- Л.: Судостроение,1982.-с.174-180)
по уровню 0,7, то первым к антенне придет эхосигнал, распространяющийся по направлению перпендикулярному к наклонному участку дна, и поправка на уклон дна определится по формуле (см. Судовые эхолоты / А.А.Хребтов и др.- Л.: Судостроение,1982.-с.174-180)

причем в данном направлении участок наклонного дна может «акустически освещать» и дополнительный лепесток ХН, что говорит об актуальности снижения уровня бокового излучения ИПИА эхолотов. Из соотношения (11) видно, что увеличение остроты направленного действия ИПИА эхолота (т.е. уменьшение  ) приводит к уменьшению
) приводит к уменьшению  . При прохождении судном акваторий с сильно расчлененным дном погрешность измерения глубины будет зависеть также и от профиля дна: при движении судна «акустически освещается» полоса донной поверхности шириной
. При прохождении судном акваторий с сильно расчлененным дном погрешность измерения глубины будет зависеть также и от профиля дна: при движении судна «акустически освещается» полоса донной поверхности шириной  , в пределах которой регистрируются ближайшие площадки дна, что маскирует имеющиеся в непосредственной близости неровности, в связи с чем увеличение остроты направленного действия ИПИА приведет к более точному отображению сложного профиля дна на регистраторе.
, в пределах которой регистрируются ближайшие площадки дна, что маскирует имеющиеся в непосредственной близости неровности, в связи с чем увеличение остроты направленного действия ИПИА приведет к более точному отображению сложного профиля дна на регистраторе.
Таким образом, по мере движения судна со скоростью по заданному курсу непрерывно вырабатывают в приемном тракте аппаратуры на каждом из фазосвязанных сигналов кратных частот по пар амплитудно-временных зависимостей электрических сигналов и , визуализирующих акустические контакты с неровностями границы раздела «вода - дно», которые пропорциональны распределению глубин акватории под носовой и кормовой частями его корпуса. Эти функции идентичны друг другу и могут быть зарегистрированы оператором на любой из рабочих частот  в зависимости от конкретных условий навигации, но сдвинуты во времени на величины - транспортных запаздываний -
в зависимости от конкретных условий навигации, но сдвинуты во времени на величины - транспортных запаздываний -  . Для определения величин промежутков времени
. Для определения величин промежутков времени  видеоимпульсные электрические сигналы
видеоимпульсные электрические сигналы  и
и  , соответствующие эхосигналам какой-либо одной выбранной оператором в качестве рабочей спектральной компоненты из набора частот
, соответствующие эхосигналам какой-либо одной выбранной оператором в качестве рабочей спектральной компоненты из набора частот  ,
,  ,
, ….,
….,  эхолотных систем поступают на два входа перемножающего устройства 29, причем сигнал от кормовой ИПИА - через блок регулируемой задержки времени 28. С интегратора 30 сигнал, пропорциональный коэффициенту
эхолотных систем поступают на два входа перемножающего устройства 29, причем сигнал от кормовой ИПИА - через блок регулируемой задержки времени 28. С интегратора 30 сигнал, пропорциональный коэффициенту  взаимной корреляции сигналов
взаимной корреляции сигналов  и
и  , поступает на экстремальный регулятор 32 и на измерительный прибор 31. Управляющий сигнал с экстремального регулятора 32 воздействует на блок регулируемой задержки 28, устанавливающий такую задержку
, поступает на экстремальный регулятор 32 и на измерительный прибор 31. Управляющий сигнал с экстремального регулятора 32 воздействует на блок регулируемой задержки 28, устанавливающий такую задержку  , чтобы на измерительном приборе 31 поддерживался максимум сигнала, т.е. максимум коэффициента
, чтобы на измерительном приборе 31 поддерживался максимум сигнала, т.е. максимум коэффициента  корреляции. По величине введенной задержки определяется скорость судна, измеренная на нескольких частотах
корреляции. По величине введенной задержки определяется скорость судна, измеренная на нескольких частотах 

Для многочастотного корреляционного гидроакустического лага имеется возможность увеличения точностных характеристик и выбора оптимального значения относительной флуктуационной погрешности измерения путевой скорости  , определяемой соотношением (1), за счет регулировки величины важного параметра -
, определяемой соотношением (1), за счет регулировки величины важного параметра -  - ширины пика взаимокорреляционной функции, что может быть необходимо при маневрировании судна с малыми скоростями движения
- ширины пика взаимокорреляционной функции, что может быть необходимо при маневрировании судна с малыми скоростями движения  в узкостях, на акватории гавани и т.д. Следует отметить, что использование обратимой интерференционной антенны РПА «Таймень» в качестве ИПИА многочастотного корреляционного гидроакустического лага может обеспечить снижение относительной флуктуационной погрешности измерения путевой скорости
в узкостях, на акватории гавани и т.д. Следует отметить, что использование обратимой интерференционной антенны РПА «Таймень» в качестве ИПИА многочастотного корреляционного гидроакустического лага может обеспечить снижение относительной флуктуационной погрешности измерения путевой скорости  за счет того, что в силу описанных выше закономерностей имеется возможность регулировки величины параметра -
за счет того, что в силу описанных выше закономерностей имеется возможность регулировки величины параметра -  - ширины пика взаимокорреляционной функции для соответствующей спектральной компоненты полигармонического сигнала (при использовании более высокочастотного сигнала числитель
- ширины пика взаимокорреляционной функции для соответствующей спектральной компоненты полигармонического сигнала (при использовании более высокочастотного сигнала числитель  уменьшается быстрее, чем знаменатель
уменьшается быстрее, чем знаменатель  , что вызывает уменьшение самого отношения), где
, что вызывает уменьшение самого отношения), где  - длина волны используемого ультразвукового сигнала (изменяется в
- длина волны используемого ультразвукового сигнала (изменяется в  раз),
раз),  - угловая ширина результирующего основного лепестка ХН ИПИА (излучение - «нелинейный» режим, прием - «линейный» режим).
- угловая ширина результирующего основного лепестка ХН ИПИА (излучение - «нелинейный» режим, прием - «линейный» режим).
Рассмотрим еще один пример. Относительная погрешность в измерении путевой скорости из-за вертикальных перемещений судна на качке при амплитудном детектировании описывается соотношением (см. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. М.: Пищевая промышленность, 1980, с.143-157)

где  - среднее значение размаха вертикальных перемещений судна,
- среднее значение размаха вертикальных перемещений судна,  - период вертикальных колебаний судна. Из (13) видно, что при амплитудном детектировании относительная погрешность в измерении путевой скорости из-за вертикальных перемещений судна на качке растет с увеличением размаха вертикальных перемещений и с уменьшением путевой скорости судна и периода качки, но уменьшается при более узком основном лепестке ХН ИПИА.
- период вертикальных колебаний судна. Из (13) видно, что при амплитудном детектировании относительная погрешность в измерении путевой скорости из-за вертикальных перемещений судна на качке растет с увеличением размаха вертикальных перемещений и с уменьшением путевой скорости судна и периода качки, но уменьшается при более узком основном лепестке ХН ИПИА.
Выше описан режим работы корреляционного гидроакустического лага для измерения абсолютной путевой скорости судна, т.е. относительно дна моря, причем на больших глубинах устройство может работать в относительном режиме, носителем информации в котором является объемная реверберация. С этой целью оператор задает стратификацию по вертикали совокупностей рассеивателей, размещенных в водной среде на 1, 2, …, , .., горизонтах глубин, осуществляя в приемных трактах эхолотных систем (стробируемые усилители 17, 18, … 19 и 14, 15, … 16), на фазосвязанных сигналах кратных частот стробирование соответствующих электрических сигналов, установив одинаковые величины - ширины строба , их исходного расположения относительно дна, скорости и последовательности перемещения строба. В результате вырабатываются в приемном тракте аппаратуры на каждом из фазосвязанных сигналов кратных частот по пар амплитудно-временных зависимостей электрических сигналов, визуализирующих акустические контакты с совокупностями рассеивателей, находящимися в отдельных 1, 2, …, , .., слоях при разделении водной среды на 1, 2, …, , .., горизонтов глубин, например, для -го горизонта глубины и , пропорциональных случайному распределению совокупностей рассеивателей в -том слое под носовой и кормовой частями корпуса движущегося со скоростью судна относительно -го слоя (горизонта). Для них осуществляют аналогичные операции с использованием описанных выше блоков и связей, т.е. измеряют для пар идентичных друг другу, но сдвинутых в парах во времени, амплитудно-временных зависимостей электрических сигналов, например, для -го горизонта глубины и , величины значений транспортных запаздываний , измерив которые, рассчитывают значений скорости движения судна = относительно -го слоя (горизонта). Это дает возможность осуществить расчет значений скорости течения в -том слое (горизонте глубин) как разность значений скоростей движения судна относительно -го слоя (горизонта глубин) и скоростей движения судна относительно дна, где знак «+» соответствует попутному, знак «-» - встречному направлению течения в -том слое (горизонте глубины) водоема соответственно относительно вектора скорости движения судна.
Однако в специфических условиях эксплуатации (маневрирование как на рейде, так и в порту, обеспечение шлюзования и швартовки) работоспособность устройства, реализующего предлагаемый способ, вследствие применения только описанной выше обработки лишь амплитудных характеристик эхосигналов кратных частот  может быть нарушена. Дело в том, что на акваториях «рукотворных» водных путей (судоходные каналы внутренней транспортной системы рек, озер, водохранилищ и т.д., искусственные каналы и фарватеры гаваней) практически отсутствуют неровности рельефа донной поверхности за счет проведения дноуглубительных работ, а сигналы объемной реверберации также не обеспечивают четкое разделение тонкой структуры водной среды по слоям за счет амплитудных признаков, в то время как различие акустических сопротивлений совокупностей рассеивателей сохранено. В данных условиях эксплуатации в устройстве предусмотрена возможность регистрации изменения такого информативного параметра облучаемых участков поверхностей совокупностей рассеивателей в слоях водной среды на трассе движения судна как их акустическое сопротивление. Таким образом, расширение эксплуатационных возможностей предлагаемого способа, позволяющего определять глубины акваторий и скорость судна (абсолютную и относительную) при движении на естественных и искусственных транспортных водных путях, может быть достигнуто за счет соответствующей обработки фазовых характеристик эхосигналов кратных частот.
может быть нарушена. Дело в том, что на акваториях «рукотворных» водных путей (судоходные каналы внутренней транспортной системы рек, озер, водохранилищ и т.д., искусственные каналы и фарватеры гаваней) практически отсутствуют неровности рельефа донной поверхности за счет проведения дноуглубительных работ, а сигналы объемной реверберации также не обеспечивают четкое разделение тонкой структуры водной среды по слоям за счет амплитудных признаков, в то время как различие акустических сопротивлений совокупностей рассеивателей сохранено. В данных условиях эксплуатации в устройстве предусмотрена возможность регистрации изменения такого информативного параметра облучаемых участков поверхностей совокупностей рассеивателей в слоях водной среды на трассе движения судна как их акустическое сопротивление. Таким образом, расширение эксплуатационных возможностей предлагаемого способа, позволяющего определять глубины акваторий и скорость судна (абсолютную и относительную) при движении на естественных и искусственных транспортных водных путях, может быть достигнуто за счет соответствующей обработки фазовых характеристик эхосигналов кратных частот.
Рассмотрим основы работоспособности фазового приемного тракта устройства, реализующего заявляемый способ, основанные на применении следующего способа получения фазочастотной характеристики (ФЧХ) границы раздела, реализуемого с использованием двух когерентных гармонических акустических сигналов  и
и  кратных частот
кратных частот  и
и  , отличающихся по частоте в целое число раз
, отличающихся по частоте в целое число раз  или
или  , с помощью которых эхолотная система облучает поверхность (см. Волощенко В.Ю., Тимошенко В.И. Параметрические гидроакустические средства ближнего подводного наблюдения. (Ч.1). - Таганрог: Изд-во ТТИ ЮФУ, 2009.-294 с., стр.204 - 206). Пусть в среду лоцирования антенной эхолотной системы излучаются два акустических сигнала
, с помощью которых эхолотная система облучает поверхность (см. Волощенко В.Ю., Тимошенко В.И. Параметрические гидроакустические средства ближнего подводного наблюдения. (Ч.1). - Таганрог: Изд-во ТТИ ЮФУ, 2009.-294 с., стр.204 - 206). Пусть в среду лоцирования антенной эхолотной системы излучаются два акустических сигнала

где  и
и  - начальные фазы и циклические частоты для соответствующих акустических сигналов. Если отражающая поверхность находится на удалении
- начальные фазы и циклические частоты для соответствующих акустических сигналов. Если отражающая поверхность находится на удалении  , то через время
, то через время  к приемной антенне (без учета затухания и расширения фронта волны) поступят эхосигналы:
к приемной антенне (без учета затухания и расширения фронта волны) поступят эхосигналы:


где  и
и  - волновые числа для соответствующих сигналов с частотами
- волновые числа для соответствующих сигналов с частотами  и
и  ;
;  - скорость звука в воде;
- скорость звука в воде;  и
и  - величины модулей коэффициентов отражения и приобретаемого фазового сдвига для звукового давления акустических сигналов при отражении от облучаемой поверхности. После обработки в приемных трактах локационного устройства фазосвязанных эхосигналов
- величины модулей коэффициентов отражения и приобретаемого фазового сдвига для звукового давления акустических сигналов при отражении от облучаемой поверхности. После обработки в приемных трактах локационного устройства фазосвязанных эхосигналов  и
и  (фильтрация, усиление, приведение к одной частоте, фазовое детектирование) можно получить информацию о фазовой характеристике отражающей поверхности цели, определяя фазу одного из эхосигналов путем сравнения с другим эхосигналом, используемым в качестве опорного. Так, например, разность фаз, приведенных к одинаковой частоте фазосвязанных сигналов (
(фильтрация, усиление, приведение к одной частоте, фазовое детектирование) можно получить информацию о фазовой характеристике отражающей поверхности цели, определяя фазу одного из эхосигналов путем сравнения с другим эхосигналом, используемым в качестве опорного. Так, например, разность фаз, приведенных к одинаковой частоте фазосвязанных сигналов ( ) кратных частот
) кратных частот  и
и  , будет равна:
, будет равна:

т.е. разность фаз приобретенных при отражении фазовых сдвигов не зависит ни от времени  распространения сигналов, ни от расстояния
распространения сигналов, ни от расстояния  до отражающего объекта, а определяется только соотношением акустических сопротивлений поверхности объекта и среды лоцирования. При облучении акустически «жестких» объектов (выход плотных коренных пород, каменистое дно в море) акустическое сопротивление
до отражающего объекта, а определяется только соотношением акустических сопротивлений поверхности объекта и среды лоцирования. При облучении акустически «жестких» объектов (выход плотных коренных пород, каменистое дно в море) акустическое сопротивление  которого больше, чем акустическое сопротивление среды распространения
которого больше, чем акустическое сопротивление среды распространения  , отражение акустических сигналов
, отражение акустических сигналов  и
и  кратных частот происходит без фазового сдвига на
кратных частот происходит без фазового сдвига на  радиан, т.е.
радиан, т.е. и
и  . В случае отражения от акустически «мягких» объектов (насыщенный пузырьками газа верхний слой речного грунта) акустическое сопротивление
. В случае отражения от акустически «мягких» объектов (насыщенный пузырьками газа верхний слой речного грунта) акустическое сопротивление  которых меньше, чем акустическое сопротивление среды распространения
которых меньше, чем акустическое сопротивление среды распространения  , отражение акустических сигналов
, отражение акустических сигналов  и
и  кратных частот происходит с фазовым сдвигом на радиан, т.е.
кратных частот происходит с фазовым сдвигом на радиан, т.е.  и
и  .
.
В устройстве, реализующем предлагаемый способ, как в носовой (Н), так и в кормовой (К) эхолотных системах в качестве фазосвязанных сигналов кратных частот используются сигнал накачки с частотой  и сформировавшаяся в нелинейной водной среде вторая гармоника с частотой
и сформировавшаяся в нелинейной водной среде вторая гармоника с частотой  . Рассмотрим работу фазового приемного тракта устройства, реализующего предлагаемый способ, например, в приемном тракте носовой (Н) эхолотной системы (фиг.1) после фильтрации (полосовой фильтр 11, частота и полосовой фильтр 12, частота ) и усиления ( усилитель 17, частота и усилитель 18, частота ) выделяются - электрический сигнал c частотой , который после удвоителя частоты 40 () подают на первый вход фазового детектора 44, а также электрический сигнал с частотой через фазовращатель 42 подается на второй вход фазового детектора 44, выход которого соединен с дополнительным входом -входового аналогового ключа 27. Выход -входового аналогового ключа 27 соединен как с индикатором 35, так и с регистратором 36, а также через блок регулируемой задержки времени 28 с первым входом перемножителя 29. На управляющий вход фазовращателя 42 подается электрический сигнал с соответствующего выхода блока формирования управляющих напряжений 38, который запускается синхроимпульсом с дополнительного выхода блока управления 37. Характеристики разнополярного электрического сигнала , формируемого на выходе фазового детектора 44 и подаваемого через блок регулируемой задержки времени 28 на первый вход перемножителя 29, пропорциональны изменению такого информативного параметра облучаемых участков совокупностей рассеивателей, находящихся в выделенном слое на заданном горизонте глубины под носовой эхолотной системой на трассе движения судна, как акустическое сопротивление совокупностей рассеивателей, причем при лоцировании «акустически мягких», а (насыщенный пузырьками газа планктон, < ) сигнал будет иметь отрицательную полярность, а для «акустически жесткой» (насыщенный взвешенными частицами объем, > ) - положительную, а для областей с промежуточными значениями акустического сопротивления электрический сигнал будет иметь флюктуирующую как амплитуду, так и полярность.
. Рассмотрим работу фазового приемного тракта устройства, реализующего предлагаемый способ, например, в приемном тракте носовой (Н) эхолотной системы (фиг.1) после фильтрации (полосовой фильтр 11, частота и полосовой фильтр 12, частота ) и усиления ( усилитель 17, частота и усилитель 18, частота ) выделяются - электрический сигнал c частотой , который после удвоителя частоты 40 () подают на первый вход фазового детектора 44, а также электрический сигнал с частотой через фазовращатель 42 подается на второй вход фазового детектора 44, выход которого соединен с дополнительным входом -входового аналогового ключа 27. Выход -входового аналогового ключа 27 соединен как с индикатором 35, так и с регистратором 36, а также через блок регулируемой задержки времени 28 с первым входом перемножителя 29. На управляющий вход фазовращателя 42 подается электрический сигнал с соответствующего выхода блока формирования управляющих напряжений 38, который запускается синхроимпульсом с дополнительного выхода блока управления 37. Характеристики разнополярного электрического сигнала , формируемого на выходе фазового детектора 44 и подаваемого через блок регулируемой задержки времени 28 на первый вход перемножителя 29, пропорциональны изменению такого информативного параметра облучаемых участков совокупностей рассеивателей, находящихся в выделенном слое на заданном горизонте глубины под носовой эхолотной системой на трассе движения судна, как акустическое сопротивление совокупностей рассеивателей, причем при лоцировании «акустически мягких», а (насыщенный пузырьками газа планктон, < ) сигнал будет иметь отрицательную полярность, а для «акустически жесткой» (насыщенный взвешенными частицами объем, > ) - положительную, а для областей с промежуточными значениями акустического сопротивления электрический сигнал будет иметь флюктуирующую как амплитуду, так и полярность.
Работа фазового приемного тракта многочастотного корреляционного лага в приемном тракте кормовой (К) эхолотной системы осуществляется аналогичным образом: - после фильтрации (полосовой фильтр 8, частота и полосовой фильтр 9, частота ) и усиления (усилитель 14, частота и усилитель 15, частота ) выделяются - электрический сигнал c частотой , который после удвоителя частоты 39 () подают на первый вход фазового детектора 43, а также электрический сигнал с частотой через фазовращатель 41 подается на второй вход фазового детектора 43, выход которого соединен с дополнительным входом -входового аналогового ключа 26. Выход -входового аналогового ключа 26 соединен как с индикатором 33, так и с регистратором 34, а также со вторым входом перемножителя 29. На второй вход перемножителя 29 поступает разнополярный электрический сигнал , формируемый на выходе фазового детектора 43, который пропорционален изменению такого информативного параметра облучаемых участков совокупностей рассеивателей, находящихся под кормовой эхолотной системой на трассе движения судна, как акустическое сопротивление. Отметим, что электрический сигнал , формируемый на выходе фазового детектора 44 кормовой эхолотной системой на трассе движения судна, будет запаздывать на промежуток времени относительно электрического сигнала , уже сформированного на выходе фазового детектора 43 носовой эхолотной системой на трассе движения судна. Таким образом, по мере движения судна по заданному курсу непрерывно определяются две амплитудно-временные зависимости электрических сигналов и , визуализирующих акустические контакты и сопротивления совокупностей рассеивателей, находящихся в отдельных 1, 2, …, , …, слоях при разделении водной среды на 1, 2, …, , …, горизонтов глубин, например, для -го горизонта глубины и , пропорциональных случайному распределению значения акустического сопротивления (мягкого или жесткого относительно водной среды) совокупностей рассеивателей в -том слое под носовой и кормовой частями корпуса движущегося со скоростью судна относительно -го слоя (горизонта).
На фиг.3 в верхней части не изображено движущееся судно-носитель гидроакустической аппаратуры, а также многочастотные пучки от его эхолотных систем, но предполагается его движение слева направо, как на фиг.1. Уточним, что на фиг.1 в водной среде схематично изображена ее стратифицированная структура, в слоях которой расположены совокупности рассеивателей, пассивно переносимые течениями. Более подробно на фиг.3. схематично изображены: а) неподвижный отдельный слой водного объема (отмечено горизонтальными штрихами), содержащий совокупности рассеивателей - «акустически мягкую» (слева, область заполненная точками, насыщенный пузырьками газа планктон, < ), «акустически жесткую» (справа, область заполненная штриховкой, насыщенный взвешенными частицами объем, > ). Результаты обработки фазосвязанных сигналов кратных частот - первой и второй гармоник - в фазовом приемном тракте движущегося слева направо судна представлены фиг.3 б) в виде двух зависимостей видеоимпульсных информационных электрических сигналов и от времени t, пропорциональные распределению акустического сопротивления совокупностей рассеивателей в этом слое. Носовая эхолотная система судна - носителя первой облучает как «акустически мягкую» (отрицательный видеоимпульс), так и «акустически жесткую» (положительный видеоимпульс) совокупности рассеивателей, пространственно разнесенные в слое. Затем кормовая эхолотная система также облучает эти же совокупности рассеивателей, в результате чего получим ту же самую последовательность видеоимпульсов, но смещенную по оси времени вправо, за счет запаздывания кормовой эхолотной системы движущегося судна.
В дальнейшем оператор измеряет для двух идентичных друг другу, но сдвинутых в парах во времени, амплитудно-временных зависимостей электрических сигналов и , визуализирующих акустические контакты, и сопротивления совокупностей рассеивателей, например, для -го горизонта глубины и , величину значения транспортного запаздывания , определив которую, рассчитывают значение скорости движения судна = относительно -го слоя (горизонта).
Для определения величины промежутка времени  видеоимпульсные электрические сигналы
видеоимпульсные электрические сигналы  и
и  , подают на два входа перемножающего устройства 29, причем сигнал от носовой ПИА - через блок регулируемой задержки времени 28. С интегратора 30 сигнал, пропорциональный коэффициенту
, подают на два входа перемножающего устройства 29, причем сигнал от носовой ПИА - через блок регулируемой задержки времени 28. С интегратора 30 сигнал, пропорциональный коэффициенту  взаимной корреляции данных сигналов, поступает на экстремальный регулятор 32 и на измерительный прибор 31. Управляющий сигнал с экстремального регулятора 32 воздействует на блок регулируемой задержки 28, устанавливающий такую задержку
взаимной корреляции данных сигналов, поступает на экстремальный регулятор 32 и на измерительный прибор 31. Управляющий сигнал с экстремального регулятора 32 воздействует на блок регулируемой задержки 28, устанавливающий такую задержку  , чтобы на измерительном приборе 31 поддерживался максимум сигнала, т.е. максимум коэффициента
, чтобы на измерительном приборе 31 поддерживался максимум сигнала, т.е. максимум коэффициента  корреляции. По величине введенной задержки определяется абсолютная скорость судна, измеренная на фазосвязанных акустических сигналах кратных частот
корреляции. По величине введенной задержки определяется абсолютная скорость судна, измеренная на фазосвязанных акустических сигналах кратных частот 

Аналогичным образом, можно осуществить измерения, например, для -го горизонта глубины и , величину значения транспортного запаздывания , измерив которую, рассчитывают значение скорости движения судна = относительно -го слоя (горизонта).
Таким образом, устройство, реализующее предлагаемый способ, позволяет оператору вычислить значения средних арифметических величин скоростей: 1)абсолютного движения судна, т.е. относительно дна, 2)относительного движения судна, т.е. относительно 1, 2, …, , …, слоев, 3)пассивного переноса совокупностей рассеивателей, находящихся в отдельных 1, 2, …, , …, слоях при разделении водной среды на 1, 2, …, , .., горизонтов глубин.
Кроме того осуществляется отображение, регистрация и документация результатов измерений детальной структуры распределения глубин водоема в реальном масштабе времени на ходу судна-носителя аппаратуры, а также параметров течений в слоях тонкой структуры статистически неоднородной водной среды в виде вертикального профиля скорости течения в k слоях стратифицированного водного объема, спроецированного на диаметральную плоскость судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЧАСТОТНЫЙ КОРРЕЛЯЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ | 2022 |
|
RU2795577C1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| Многочастотный доплеровский способ измерений скорости течений в водной среде | 2022 |
|
RU2795579C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| Акустический способ измерения параметров движения слоистой морской среды на прибрежной акватории | 2023 |
|
RU2833473C1 |
| Акустический способ измерения параметров движения слоистой морской среды | 2022 |
|
RU2801053C1 |
| Способ измерения скорости подводных течений | 2022 |
|
RU2804343C1 |
| Способ абсолютной градуировки излучающих и приемных электроакустических преобразователей антенного блока акустического доплеровского профилографа течений | 2023 |
|
RU2821706C1 |
| Способ градуировки обратимых электроакустических преобразователей антенн корреляционного измерителя скорости течений | 2023 |
|
RU2835804C1 |

Изобретение относится к области гидроакустики и океанографии, в частности к корреляционным методам измерения скорости движения, позволяющим определять скорость судна как относительно дна, так и относительно пассивно переносимых течениями рассеивателей, находящихся в слоях тонкой структуры водной среды океана, а также сопровождается измерением глубин акватории по пути следования с требуемой точностью. Изобретение может быть применено для измерения акустическим способом пространственно-временной картины поля течений, которое рассматривается как анизотропное и неоднородное. Сущность: скорость течения является случайной функцией географических координат места измерения, глубины горизонта и времени. В частности, при пересечении поля в горизонтальной плоскости интервалы временной корреляции скорости течений оцениваются в единицы часов, а интервал пространственной корреляции - примерно до тысяч метров. Работоспособность способа основана на том, что информацию получают за счет эхозондирования ультразвуком совокупностей рассеивателей в 1,2,…, , ..,
, .., слоях неоднородной водной среды, которые разделены граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, скорость звука, например, вертикальный градиент скорости на границах между слоями может превышать 5-10 см/с на метр глубины), причем, совокупности рассеивателей случайным образом и статистически неоднородно распределены в водных объемах слоев (от 1 до k). Рассеиватели (пузырьки, взвешенные частицы, планктон, различные неоднородности и т.п.) в слоях имеют нейтральную плавучесть, пассивно переносятся водными массами с различными линейными скоростями течений
слоях неоднородной водной среды, которые разделены граничными прослойками с резкими изменениями термодинамических характеристик (температура, соленость, скорость звука, например, вертикальный градиент скорости на границах между слоями может превышать 5-10 см/с на метр глубины), причем, совокупности рассеивателей случайным образом и статистически неоднородно распределены в водных объемах слоев (от 1 до k). Рассеиватели (пузырьки, взвешенные частицы, планктон, различные неоднородности и т.п.) в слоях имеют нейтральную плавучесть, пассивно переносятся водными массами с различными линейными скоростями течений  относительно дна, причем, величины их акустических сопротивлений
относительно дна, причем, величины их акустических сопротивлений  ,
,  , ….,
, ….,  произвольно флюктуируют относительно значения акустического сопротивления
произвольно флюктуируют относительно значения акустического сопротивления  водной среды, т.е. в общем случае совокупность рассеивателей может быть как акустически мягкой, так и акустически жесткой относительно водной среды. С акустической точки зрения планктон представляет собой совокупность рассеивателей в водной среде, плотность и сжимаемость которых отличается от аналогичных характеристик окружающей жидкости, причем эффективность рассеяния ультразвука зависит от того, насколько плотность и сжимаемость рассеивателей отличаются от соответствующих свойств окружающей среды и от того, в каком соотношении находятся размеры рассеивателей и длина УЗ волны. Регистрация акустического сопротивления поверхности совокупности рассеивателей, которое характеризует ее динамическую реакцию на воздействие упругой волны, в результате чего происходят фазовые сдвиги или для звукового давления («акустически мягкая» граница) или для колебательной скорости частиц среды («акустически жесткая» граница) в отраженной волне, может позволить использовать эту величину в качестве дополнительного классификационного признака для исследования анизотропной и неоднородной пространственно-временной картины поля течений. Технический результат: повышение достоверности получения информации о параметрах течений в слоях тонкой структуры статистически неоднородной водной среды со случайно распределенными объемами рассеивателей, что позволяет получить новый объем первичных данных о подводной обстановке и добиться расширения эксплуатационных возможностей способа. 1 з.п. ф-лы, 3 ил.
водной среды, т.е. в общем случае совокупность рассеивателей может быть как акустически мягкой, так и акустически жесткой относительно водной среды. С акустической точки зрения планктон представляет собой совокупность рассеивателей в водной среде, плотность и сжимаемость которых отличается от аналогичных характеристик окружающей жидкости, причем эффективность рассеяния ультразвука зависит от того, насколько плотность и сжимаемость рассеивателей отличаются от соответствующих свойств окружающей среды и от того, в каком соотношении находятся размеры рассеивателей и длина УЗ волны. Регистрация акустического сопротивления поверхности совокупности рассеивателей, которое характеризует ее динамическую реакцию на воздействие упругой волны, в результате чего происходят фазовые сдвиги или для звукового давления («акустически мягкая» граница) или для колебательной скорости частиц среды («акустически жесткая» граница) в отраженной волне, может позволить использовать эту величину в качестве дополнительного классификационного признака для исследования анизотропной и неоднородной пространственно-временной картины поля течений. Технический результат: повышение достоверности получения информации о параметрах течений в слоях тонкой структуры статистически неоднородной водной среды со случайно распределенными объемами рассеивателей, что позволяет получить новый объем первичных данных о подводной обстановке и добиться расширения эксплуатационных возможностей способа. 1 з.п. ф-лы, 3 ил.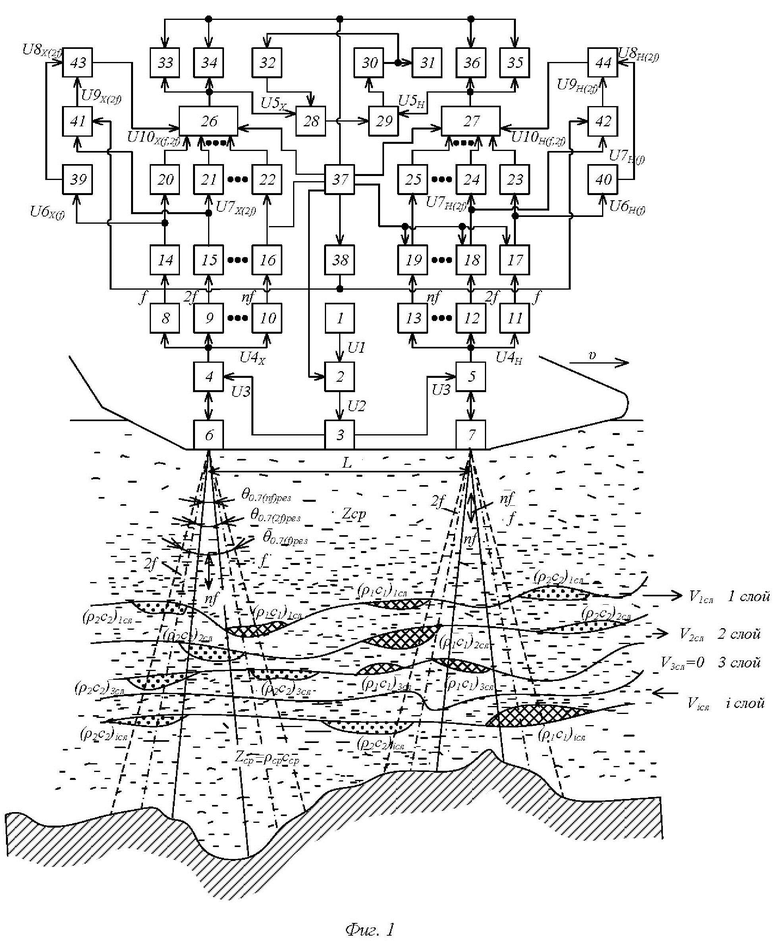
1. Корреляционный способ измерения параметров тонкой структуры водной среды, заключающийся в том, что
- размещают на расстоянии  в диаметральной плоскости судна, в частности в носовой и кормовой частях днища, две измерительные параметрические излучающие антенны ИПИА эхолотных систем, включающих заданное количество электроакустических преобразователей ЭАП, причем обе ИПИА ориентированы акустическими осями вертикально вниз, имеют одинаковые волновые размеры, а облучаемые ультразвуковыми волнами УЗ области дна под носом и кормой судна не перекрываются;
в диаметральной плоскости судна, в частности в носовой и кормовой частях днища, две измерительные параметрические излучающие антенны ИПИА эхолотных систем, включающих заданное количество электроакустических преобразователей ЭАП, причем обе ИПИА ориентированы акустическими осями вертикально вниз, имеют одинаковые волновые размеры, а облучаемые ультразвуковыми волнами УЗ области дна под носом и кормой судна не перекрываются;
- обеспечивают работоспособность в режимах излучения/приема каждого ЭАП за счет использования обратного/прямого пьезоэлектрических эффектов с заданной резонансной частотой  ;
;
- генерируют в излучающем тракте аппаратуры электрические колебания, которые преобразуют в кратковременные амплитудно-импульсные модулированные колебания, огибающая которых повторяет форму импульсов прямоугольной формы, а посылка содержит в себе несущую частоту  ;
;
- преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА амплитудно-импульсные модулированные колебания в периодические посылки УЗ волн с заданной длительностью, обеспечивая передачу частицам водной среды акустической энергии за счет распространения колебаний с циклической частотой  и формируя за счет интерференции в водной среде под носовой и кормовой частями корпуса движущегося со скоростью
и формируя за счет интерференции в водной среде под носовой и кормовой частями корпуса движущегося со скоростью  судна УЗ облучающие пучки;
судна УЗ облучающие пучки;
- осуществляют акустические контакты с участками поверхностей: совокупностей рассеивателей водной среды, в 1, 2,…, , ..,
, .., слоях которой они случайным образом и статистически неоднородно распределены, при этом каждая совокупность рассеивателей в любом из
слоях которой они случайным образом и статистически неоднородно распределены, при этом каждая совокупность рассеивателей в любом из  слоев обладает собственным набором характеристик на i-том горизонте глубины, которые включают количество структурных элементов
слоев обладает собственным набором характеристик на i-том горизонте глубины, которые включают количество структурных элементов  , их линейный размер
, их линейный размер  , отражательную способность
, отражательную способность  и акустическое сопротивление
и акустическое сопротивление  , отличающееся от аналогичного параметра водной среды, а также нейтральной плавучестью, вследствие чего совокупности рассеивателей пассивно переносятся водными массами с различными линейными скоростями течений
, отличающееся от аналогичного параметра водной среды, а также нейтральной плавучестью, вследствие чего совокупности рассеивателей пассивно переносятся водными массами с различными линейными скоростями течений  относительно дна,
относительно дна,
границы раздела «вода - дно» со случайным распределением донных неровностей, причем эти поверхности участков находятся в данный момент времени под носовой и кормовой ИПИА эхолотных систем, т.е. носовой (Н) и кормовой (К) частями движущегося судна со скоростью  относительно дна, что обеспечивает одновременное формирование двух пространственно-временных зависимостей информационных сигналов - объемных реверберационных процессов и запаздывающих эхосигналов, квадраты огибающих которых будет содержать спектр частот, а их огибающие будет флуктуировать хаотическим образом;
относительно дна, что обеспечивает одновременное формирование двух пространственно-временных зависимостей информационных сигналов - объемных реверберационных процессов и запаздывающих эхосигналов, квадраты огибающих которых будет содержать спектр частот, а их огибающие будет флуктуировать хаотическим образом;
- преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА движущегося со скоростью  судна две пространственно-временные зависимости информационных сигналов, в частности амплитуд эхосигналов от обоих облучаемых участков границы раздела «вода - дно» со случайными и различными распределениями донных неровностей, в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
судна две пространственно-временные зависимости информационных сигналов, в частности амплитуд эхосигналов от обоих облучаемых участков границы раздела «вода - дно» со случайными и различными распределениями донных неровностей, в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
- определяют по мере движения судна по заданному курсу две амплитудно-временные зависимости электрических сигналов  и
и  , визуализирующих акустические контакты с неровностями границы раздела «вода - дно», пропорциональных распределению глубин акватории под носовой и кормовой частями корпуса движущегося со скоростью судна, причем эти функции идентичны друг другу, но сдвинуты во времени на величину
, визуализирующих акустические контакты с неровностями границы раздела «вода - дно», пропорциональных распределению глубин акватории под носовой и кормовой частями корпуса движущегося со скоростью судна, причем эти функции идентичны друг другу, но сдвинуты во времени на величину  ;
;
- определяют величину коэффициента взаимной корреляции для несовпадающих в данный момент времени зависимостей электрических сигналов  и
и  , пропорциональных распределению глубин акватории под носовой и кормовой частями корпуса по курсу движения судна, что позволяет вычислить скорость движения судна
, пропорциональных распределению глубин акватории под носовой и кормовой частями корпуса по курсу движения судна, что позволяет вычислить скорость движения судна  ;
;
отличающийся тем, что
- задают для обеих ИПИА эхолотных систем критерий соответствия их волновых размеров интервалу значений

где  - диаметр антенны,
- диаметр антенны,  - длина волны УЗ с частотой
- длина волны УЗ с частотой  , распространяющегося со скоростью
, распространяющегося со скоростью  в воде,
в воде,  - амплитуда звукового давления в Паскалях у поверхности ИПИА в режиме излучения;
- амплитуда звукового давления в Паскалях у поверхности ИПИА в режиме излучения;
- генерируют с помощью излучающего тракта аппаратуры электрические колебания с частотой , поступающие на две ИПИА эхолотных систем в режиме излучения;
- преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП двух ИПИА эхолотных систем амплитудно-импульсные модулированные колебания в периодические посылки мощных УЗ волн с необходимой длительностью, обеспечивая передачу частицам водной среды акустической энергии, достаточной для проявления нелинейных упругих свойств водной среды под носовой и кормовой частями корпуса движущегося со скоростью судна, что формирует в водной среде две параметрические излучающие антенны ПИА, в объемах которых распределены нелинейные источники генерируемых спектральных компонент;
- генерируют посредством обеих ПИА в водной среде два полигармонических пучка УЗ фазосвязанных сигналов с кратными частотами  , где
, где  - порядковый номер гармоники, причем акустические поля гармоник соосны, их волновые векторы ориентированы вертикально вниз, а с ростом номера гармоники пучки имеют уменьшающиеся величины поперечного сечения;
- порядковый номер гармоники, причем акустические поля гармоник соосны, их волновые векторы ориентированы вертикально вниз, а с ростом номера гармоники пучки имеют уменьшающиеся величины поперечного сечения;
- устанавливают на УЗ фазосвязанных сигналах с кратными частотами акустические контакты с участками поверхностей:
совокупностей рассеивателей водной среды, в 1, 2,…,, .., слоях которой они случайным образом и статистически неоднородно распределены, каждая совокупность рассеивателей в любом из слоев обладает «уникальным» набором характеристик, в частности, на i-том горизонте глубины - количество структурных элементов , их линейный размер , отражательная способность и акустическое сопротивление ,
границы раздела «вода - дно» со случайным распределением донных неровностей, причем эти поверхности участков находятся в данный момент времени под носовой и кормовой ИПИА эхолотных систем, т.е. носовой (Н) и кормовой (К) частями движущегося судна со скоростью ( ) относительно
) относительно  -го слоя, что обеспечивает формирование
-го слоя, что обеспечивает формирование  носовых и кормовых информационных сигналов, которые несут как амплитудную, так и фазовую информацию об участках поверхностей, позволяя судить об их отражательной способности и акустическом сопротивлении, а также об их глубине нахождения;
носовых и кормовых информационных сигналов, которые несут как амплитудную, так и фазовую информацию об участках поверхностей, позволяя судить об их отражательной способности и акустическом сопротивлении, а также об их глубине нахождения;
- преобразуют с помощью прямого пьезоэффекта пьезоэлементов ЭАП носовой и кормовой ИПИА  носовых и кормовых информационных сигналов от участков поверхностей совокупностей рассеивателей водной среды, которые движутся с различными скоростями
носовых и кормовых информационных сигналов от участков поверхностей совокупностей рассеивателей водной среды, которые движутся с различными скоростями  течений на 1, 2,…,, .., горизонтах глубин и находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью (
течений на 1, 2,…,, .., горизонтах глубин и находятся в данный момент времени под носовой (Н) и кормовой (К) частями движущегося со скоростью ( ) судна относительно i-го слоя, и границы раздела «вода - дно» со случайным распределением донных неровностей в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
) судна относительно i-го слоя, и границы раздела «вода - дно» со случайным распределением донных неровностей в соответствующие электрические сигналы, поступающие на вход приемного тракта аппаратуры;
- осуществляют вертикальную пространственную стратификацию совокупностей рассеивателей водной среды на 1, 2,…,, .., горизонтов глубин, производя в приемных трактах эхолотных систем на фазосвязанных сигналах кратных частот  стробирование соответствующих электрических сигналов, установив одинаковые величины - ширины строба
стробирование соответствующих электрических сигналов, установив одинаковые величины - ширины строба  , их исходного расположения относительно дна, скорости и последовательности перемещения строба;
, их исходного расположения относительно дна, скорости и последовательности перемещения строба;
- вырабатывают в приемном тракте аппаратуры на каждом из фазосвязанных сигналов кратных частот по пар амплитудно-временных зависимостей электрических сигналов и , визуализирующих акустические контакты с неровностями границы раздела «вода - дно», которые пропорциональны распределению глубин акватории под носовой и кормовой частями корпуса движущегося со скоростью судна;
- измеряют для пар идентичных друг другу, но сдвинутых в парах во времени амплитудно-временных зависимостей электрических сигналов и , величины  значений транспортных запаздываний
значений транспортных запаздываний  для определения значений скорости движения судна
для определения значений скорости движения судна  относительно дна;
относительно дна;
- вырабатывают в приемном тракте аппаратуры на каждом из фазосвязанных сигналов кратных частот по пар амплитудно-временных зависимостей электрических сигналов, визуализирующих акустические контакты с совокупностями рассеивателей, находящимися в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин, например, для i-го горизонта глубины  и
и  , пропорциональных случайному распределению совокупностей рассеивателей в i-том слое под носовой и кормовой частями корпуса движущегося со скоростью
, пропорциональных случайному распределению совокупностей рассеивателей в i-том слое под носовой и кормовой частями корпуса движущегося со скоростью  судна относительно i-го слоя;
судна относительно i-го слоя;
- измеряют для пар идентичных друг другу, но сдвинутых в парах во времени, амплитудно-временных зависимостей электрических сигналов, например, для i-го горизонта глубины и , величины значений транспортных запаздываний  , для определения значений скорости движения судна
, для определения значений скорости движения судна  =
=
 относительно i-го слоя;
относительно i-го слоя;
- вычисляют значений скорости  течения в i-том слое как разность значений скоростей движения судна относительно i-го слоя и скоростей движения
течения в i-том слое как разность значений скоростей движения судна относительно i-го слоя и скоростей движения  судна относительно дна, где знак «+» соответствует попутному, знак «-» - встречному направлению течения в i-том слое водоема соответственно относительно вектора скорости движения судна;
судна относительно дна, где знак «+» соответствует попутному, знак «-» - встречному направлению течения в i-том слое водоема соответственно относительно вектора скорости движения судна;
- вырабатывают в приемном тракте аппаратуры на двух фазосвязанных сигналах кратных частот  по две амплитудно-временные зависимости электрических сигналов, визуализирующих акустические контакты и сопротивления совокупностей рассеивателей, находящихся в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин, например, для i-го горизонта глубины
по две амплитудно-временные зависимости электрических сигналов, визуализирующих акустические контакты и сопротивления совокупностей рассеивателей, находящихся в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин, например, для i-го горизонта глубины  и
и  , пропорциональных случайному распределению значения акустического сопротивления совокупностей рассеивателей в i-том слое под носовой и кормовой частями корпуса движущегося со скоростью судна относительно i-го слоя;
, пропорциональных случайному распределению значения акустического сопротивления совокупностей рассеивателей в i-том слое под носовой и кормовой частями корпуса движущегося со скоростью судна относительно i-го слоя;
- измеряют для двух идентичных друг другу, но сдвинутых в парах во времени, амплитудно-временных зависимостей электрических сигналов, визуализирующих акустические контакты и сопротивления совокупностей рассеивателей, например, для i-го горизонта глубины и , величину значения транспортного запаздывания  , для определения скорости движения судна
, для определения скорости движения судна  =
=
 относительно i-го слоя;
относительно i-го слоя;
- вычисляют значения средних арифметических величин скоростей абсолютного движения судна относительно дна, относительного движения судна относительно 1, 2,…,, .., слоев, пассивного переноса совокупностей рассеивателей, находящихся в отдельных 1, 2,…,, .., слоях при разделении водной среды на 1, 2,…,, .., горизонтов глубин;
- осуществляют отображение, регистрацию и документирование результатов измерений детальной структуры распределения глубин водоема в реальном масштабе времени на ходу судна-носителя аппаратуры, абсолютной скорости движения судна-носителя, параметров течений в слоях тонкой структуры статистически неоднородной водной среды, который представлен в виде вертикального профиля скорости течения в k слоях стратифицированного водного объема, спроецированного на диаметральную плоскость судна.
2. Корреляционный способ по п.1, отличающийся тем, что используют ЭАП, каждый из которых снабжен пьезоэлементом простой геометрической формы, узлами экранировки, гидро-, электро- и шумоизоляции.
| Ультразвуковой способ измерения скорости течения и расхода воды в открытых водоемах | 2016 |
|
RU2664456C2 |
| СПОСОБ ФОРМИРОВАНИЯ И ПРИМЕНЕНИЯ ПРОСТРАНСТВЕННО РАЗВИТОЙ ПРОСВЕТНОЙ ПАРАМЕТРИЧЕСКОЙ АНТЕННЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2602995C2 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ В МОРСКОЙ СРЕДЕ | 2011 |
|
RU2474794C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЗВУКОВОГО ДАВЛЕНИЯ ГИДРОАКУСТИЧЕСКОГО ИСТОЧНИКА В ЕСТЕСТВЕННОМ ВОДОЕМЕ И ИЗЛУЧАТЕЛЬ ОПОРНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2010456C1 |
| US 4188610 A, 12.02.1980. | |||
