Область техники, к которой относится изобретение
Изобретение относится к области радиотехники, а именно к конструктивному выполнению пневмогидравлической быстро развёртываемой антенно-фидерной системы с автоматизированным изменением геометрических и электрических параметров
Уровень техники
а) Описание аналогов
Известна мачта по патенту RU 2359096 C1 от 01.02.2008, МПК E04H 12/00 (2006/01) опубл. 20.06.2009 Бюл. № 17, содержащая вертикально расположенный пустотелый ствол, закрепленный на опорной площадке и поддерживаемый оттяжками, в котором размещены заполненные воздухом или газом легче воздуха герметичные тела. Ствол цилиндрической или конической формы может состоять из секций, может быть выполнен из металла или пластмассы и иметь сплошную или решетчатую стенку. В пустотелом стволе свободно размещены заполненные воздухом (в случае размещения мачты в водной среде) или газом легче воздуха (в случае размещения мачты в воздушной среде) герметичные тела шарообразной, овальной, цилиндрической или иной формы. В качестве герметичных тел могут быть использованы пористые тела или полые оболочки, например, заполненные гелием. Герметичные тела могут быть свободно соединены между собой «в линию» эластичной перемычкой. При этом в пустотелом стволе образуется «столб» из герметичных тел, обладающий определенной «подъемной» силой, при этом происходит облегчение конструкции мачты. Соединение герметичных тел перемычками 6 облегчает процесс их загрузки в пустотелый столб или выгрузки из него.
Недостатками мачты является отсутствие возможности автоматизированного изменения ее геометрических и электрических параметров после развертывания, отсутствие возможности складывания мачты, отсутствие возможности быстрого свертывания, большое количество обслуживающего персонала для развертывания мачты.
Известна автоматически запираемая телескопическая мачта по патенту RU 2756640 C1 от 04.06.2019, МПК E04H 12/18 (2006/01) и F16B 7/10 опубл. 04.10.2021 Бюл. № 28, включающая в себя множество секций телескопической мачты, включающих в себя основную трубу, промежуточную трубу и концевую трубу, в которой промежуточная и концевая трубы выполнены с возможностью телескопического приема в основную трубу, автоматический основной замок, имеющий хомут для установки на основную трубу, и промежуточный автоматический замок, имеющий хомут для установки на промежуточную трубу.
Недостатками мачты является фиксированная общая высота, фиксированная высота колена, тяжелое металлическое (или любое другое) основание, множество двигающихся и трущихся деталей, подверженных истиранию, отсутствие возможности автоматизированного изменения ее геометрических и электрических параметров после развертывания, металлическая конструкция, обладающая существенными демаскирующими признаками для средств радиолокационной разведки, т.к. подвержена электромагнитным наводкам.
Известна телескопическая мачта (RU, патент 2676398 C2 от 20.12.2013, МПК H01Q 1/10 (2006/01) опубл. 27.06.2015 Бюл. № 18, используемая в качестве устройства для подъема и фиксации на заданной высоте полезной нагрузки, например антенных или оптических средств наблюдения, и предназначенной, в основном, для использования в составе мобильных комплексов разведки, имеющих в составе ходовой базы гидропривод и устройства управления его элементами. Телескопическая мачта обеспечивает подъем полезной нагрузки большой массы, надежную фиксацию положения полезной нагрузки на заданной высоте. Для этого подъемник выполнен в виде телескопического гидроцилиндра двухстороннего действия с двумя штуцерами в плунжерной части для подвода гидравлической жидкости. Телескопический гидроцилиндр двухстороннего действия установлен внутри секций телескопической мачты и закреплен одним концом в основании неподвижной секции, а вторым концом в основании последней подвижной секции, и имеет суммарный рабочий ход, равный высоте подъема подвижных секций. На входе штуцеров установлены гидрозамки (управляемые обратные клапаны), а канал управления каждого гидрозамка соединен с напорной магистралью противоположного гидрозамка.
Недостатками известной телескопической мачты являются значительные массо-габаритные показатели, значительное время и сложность развертывания/свертывания, ограниченные функциональные возможности, металлическая конструкция, обладающая существенными демаскирующими признаками для средств радиолокационной разведки, т.к. подвержена электромагнитным наводкам.
Известен гидравлический привод, используемый в мобильной антенной установке (АУ) по патенту RU 2115977 C1 (H01Q 1/08, 1999). Известная мобильная АУ содержит контейнер с аппаратурой, конструктивно совмещенный с антенной системой, включающей снабженную гидроцилиндром поворота подъемную мачту с антенной, представляющей собой фазированную антенную решетку (ФАР). Подъемная мачта снабжена устройствами фиксации последней в развернутом (рабочем) и транспортировочном (походном) положениях. Контейнер снабжен выносными поворачивающимися опорами с гидродомкратами, устанавливаемыми с возможностью контактирования с грунтом и выполнен с возможностью размещения на автотранспортном средстве.
При доставке АУ к месту развертывания на автотранспортном средстве, например на полуприцепе, развертывание последней осуществляют следующим образом. Контейнер (антенную систему) вывешивают и горизонтируют с помощью гидравлического привода, включающего упомянутые гидродомкраты. Перевод панелей ФАР в рабочее положение осуществляется при помощи электромеханического привода. Подъемную мачту с ФАР переводят в вертикальное положение и фиксируют в этом положении при помощи гидроцилиндра.
Недостатками известного гидравлического привода являются значительные массо-габаритные показатели, значительное время и сложность развертывания/свертывания, ограниченные функциональные возможности, отсутствие возможности автоматизированного изменения ее геометрических и электрических параметров после развертывания, металлическая конструкция, обладающая существенными демаскирующими признаками для средств радиолокационной разведки, т.к. подвержена электромагнитным наводкам.
Известен гидравлический привод, преимущественно мобильной антенной установки с подъемной мачтой по патенту RU 2281244 C1 (B66F 11/04, H01Q 1/32, 2006). Известный гидравлический привод содержит систему управления, первый и второй трехпозиционные гидрораспределители с электромагнитным управлением, регулятор расхода, установленные на шасси транспортного средства насосный агрегат с баком.
Гидравлический привод мобильной антенной установки с подъемной мачтой работает следующим образом.
На месте развертывания мобильной АУ вначале вручную переводят выносные поворачивающиеся опоры с гидродомкратами из транспортировочного (походного) положения в рабочее положение. После вывешивания шасси транспортного средства последнее со смонтированным на нем основанием с подъемной мачтой с антенной горизонтируют сначала в продольной , затем в поперечной плоскостях транспортного средства.
Затем в автоматическом режиме посредством системы управления осуществляют подъем подъемной мачты. После этого посредством исполнительного гидроцилиндра осуществляют разворот опорной платформы совместно с установленными на ней промежуточной платформой и ОПУ с антенной. После чего, также в автоматическом режиме, осуществляют горизонтирование промежуточной платформы.
В период «дежурства» мобильной АУ, при необходимости, по сигналам датчиков продольного и поперечного горизонтирования и команде системы управления аналогичным образом автоматически осуществляется подгоризонтирование промежуточной платформы.
Удержание подъемной мачты в поднятом (рабочем) положении обеспечивается односторонними гидрозамками, сообщенными соответственно с поршневыми полостями гидроцилиндров подъема.
При переводе АУ из рабочего положения в транспортировочное (походное) вначале промежуточную платформу с антенным модулем переводят в положение, которое при складывании подъемной мачты исключает возможность соударений элементов АУ. Дальнейшее свертывание АУ в транспортировочное положение производят в обратной последовательности в сравнении с развертыванием АУ.
Недостатками известного гидравлического привода являются ограниченные функциональные возможности, что обусловлено целевыми характеристиками известной мобильной АУ, у которой опорная платформа совместно с антенным устройством установлена на верхней секции подъемной мачты. В известном устройстве разворот опорной платформы совместно с установленным на ней антенным устройством в рабочее положение производят после подъема подъемной мачты совместно с опорной платформой на заданную высоту, т.е. операция разворота опорной платформы в рабочее положения и операция подъема подъемной мачты разнесены во времени. При свертывании АУ в транспортировочное положение эти операции производят в обратной последовательности в сравнении с развертыванием АУ. Разнесение отмеченных операций во времени увеличивает продолжительность развертывания-свертывания АУ. Кроме того, недостатками являются значительные массо-габаритные показатели, значительное время и сложность развертывания/свертывания, ограниченные функциональные возможности, отсутствие возможности автоматизированного изменения ее геометрических и электрических параметров после развертывания, металлическая конструкция, обладающая существенными демаскирующими признаками для средств радиолокационной разведки, т.к. подвержена электромагнитным наводкам.
Известен гидравлический привод преимущественно мобильной антенной установки с подъемной мачтой по патенту RU 2449942 C1 (B66F 11/04, F16B 15/00, H01Q 1/08, 2012). Известный гидравлический привод содержит систему управления, первый трехпозиционный гидрораспределитель с электромагнитным управлением, первый и второй односторонние гидрозамки, первый и второй ограничители расхода, дроссель
и установленные на основании, смонтированном на шасси транспортного средства, насосный агрегат с баком.
Известен гидравлический привод преимущественно мобильной антенной установки с подъемным элементом (патент РФ 2570679, МПК B66F 11/04 (2006.01), H01Q 1/08 (2006.01), F15B 15/14 (2006.01), опубл. 10.12.2015, бюлл. № 34), который содержит систему управления, первый трехпозиционный гидрораспределитель с электромагнитным управлением (ТГ), первый и второй односторонние гидрозамки (ОГЗ), первый и второй ограничители расхода (ОР), дроссель и установленный на основании, смонтированном на шасси транспортного средства, насосный агрегат (НА) с баком.
Гидравлический привод мобильной АУ работает следующим образом. На месте развертывания мобильной АУ вначале посредством автономной гидросистемы вывешивают и горизонтируют транспортное средство. Для подъема (поворота) подъемного элемента (панели ФАР) в рабочее положение одновременно с трехпозиционным гидрораспределителем (МГ1) по команде системы управления включается трехпозиционный гидрораспределитель (МГ2) и жидкость под давлением от гидронасоса поступает в гидроблок и через ограничитель расхода, односторонний гидрозамок, ограничитель расхода, в поршневую полость левого и правого гидроцилиов подъема. Скорость подъема подъемного элемента (панели ФАР) будет соответствовать настройке ограничителя расхода гидроблока (ограничитель расхода предназначен для обеспечения определенной скорости при опускании подъемного элемента). В процессе подъема (поворота) подъемного элемента из штоковых полостей гидроцилиндров жидкость будет вытесняться в бак.
При опускании подъемного элемента (панели ФАР) под собственным весом скоростной режим опускания будет обеспечиваться дросселем, при этом в конце опускания произойдет плавное безударное касание подъемного элемента (панели ФАР) с подпружиненными стопорами, после чего гидравлические стопора-замки, взаимодействующие с соответствующими ответными элементами (на чертеже не показано), автоматически зафиксируют подъемный элемент (панель ФАР) относительно основания в транспортировочном (походном) положении.
Недостатками известного гидравлического привода являются ограниченные функциональные возможности, значительные массо-габаритные показатели, значительное время и сложность развертывания/свертывания, отсутствие возможности автоматизированного изменения геометрических и электрических параметров после развертывания, металлическая конструкция, обладающая существенными демаскирующими признаками для средств радиолокационной разведки, т.к. подвержена электромагнитным наводкам.
Известна логопериодическая антенна оп патенту RU 2253926 C1 от 03.12.2003, МПК H01Q 11/10 опубл. 10.06.2005 Бюл. № 16, содержащая два антенных полуполотна, лежащих в плоскостях, расположенных параллельно друг другу и сформированных рядами вибраторов зубчатой формы.
Недостатками антенны являются невозможность изменения характеристик антенны в широком диапазоне без опускания несущих элементов, отсутствие возможности дистанционного управления характеристиками антенны, радиолокационная заметность.
Наиболее близким аналогом (прототипом) антенной системы является пневматическая мачта по патенту SU 392578, МПК Н010Q 1/12, опубл. 27.7.1973 г., которая согласно описанию может использоваться для установки антенны.
Пневматическая мачта состоит из пневмооболочки, изготовленной, например, из прорезиненной ткани, закрепленной в нижней части и открытой сверху. Внутри пневмооболочки, размещен подвижный пневматический золотник, представляющий собой резиновую камеру в форме цилиндрического тора. После наполнения золотниковой камеры сжатым агентом, например воздухом, она плотно перекрывает полость пневмооболочки. Нижняя часть пневмооболочки снабжена воздуховодом.
Подьем мачты осуществляется с помощью сжатого воздуха, подаваемого по воздуховоду в нижнюю часть пневмооболочки. При этом подвижный пневматический золотник перемещается вверх. По достижении требуемой высоты подъема пневмооболочки подача сжатого воздуха по воздуховоду прекращается, и мачта раскрепляется вантовыми оттяжками.
Для демонтажа мачты полость пневмооболочки необходимо соединить с атмосферой и вернуть подвижный золотник в исходное положение.
Недостатками пневматической мачты является невозможность автоматизированного изменения ее геометрических и электрических параметров после развертывания.
Анализ принципов функционирования известных АУ показал, что основными действиями при управлении их параметрами при развертывании, используемые в качестве прототипа, являются:
доставляют антенную систему в транспортном положении к месту развертывания,
механически закрепляют антенную систему к поверхности,
развертывают антенную систему с использованием электромеханического, гидравлического или пневматического привода.
Свертывание АУ в транспортное положение, как правило, осуществляют в обратном порядке.
Техническая проблема
Техническая проблема заключается в отсутствии возможности быстрого автоматизированного изменения геометрических и электрических характеристик антенны после ее развертывания, отсутствии возможности дистанционного управления характеристиками антенны, высокой радиолокационной заметности существующих антенн.
Большая часть известных аналогов представляет собой не антенную систему, а отдельные устройства - мачту (пневматическую или гидравлическую) и подъемный элемент (в качестве которого может выступать антенное полотно), изменение геометрических и электрических характеристик которых после развертывания затруднено.
Техническая проблема решается за счет разработки антенной системы с пневмогидравлической конструкцией, заполняемой токопроводящим веществом, позволяющей изменять ее геометрические и электрические параметры путем дистанционного управления электромагнитными воздушными и гидравлическими клапанами.
Раскрытие изобретения (его сущность)
а) Технический результат, на достижение которого направлено изобретение
Техническим результатом изобретения является возможность изменения геометрических и электрических характеристик антенной системы в автоматизированном режиме после ее развертывания, без учета предыдущей конфигурации, уменьшение времени развертывания и свертывания, уменьшение радиолокационной заметности.
Технический результат в пневмогидравлической антенной системе достигается тем, что пневмогидравлическая быстро развёртываемая антенная система с автоматизированным изменением геометрических и электрических параметров, содержит: пневматическую подсистему, выполненную из полых гибких трубок из токонепроводящего материала, заполняемых воздухом, собранных в N ярусов, включающую датчики давления, расположенные на каждом ярусе, при этом каждый ярус состоит из соединенных между собой полых трапеций, а N-ый ярус - из треугольников, при этом нижняя часть первого яруса представляет собой опорную платформу с устройствами для механического крепления к поверхности, гидравлическую подсистему, выполненную из полых гибких трубок из токонепроводящего материала, заполняемых токопроводящим веществом для формирования антенного полотна требуемой конфигурации, прикрепленных любым способом к ребрам каждого яруса пневматической подсистемы, со встроенными ВЧ-разъемами в ребрах гидравлической подсистемы, контакты которых подключены к токопроводящей оплетке по всему диаметру ребер в точке подключения и разделены гидравлическими электромагнитными клапанами, включающую датчики давления, расположенные на каждом ребре, распределенную подсистему электромагнитных дистанционно управляемых клапанов, встроенных в ребра каждого яруса пневматической и гидравлической подсистем, управляемых по каналам связи любой физической природы, при этом устанавливают электромагнитные клапаны гидравлической подсистемы двух типов: электромагнитные гидравлические клапаны со встроенным ВЧ-разъемом для подключения приемо-передающего устройства и электромагнитные гидравлические клапаны без ВЧ-разъема, подсистему связи, включающую приемопередающие устройства для образования каналов связи, при этом элементы подсистемы связи встроены в блок управления, реверсивные воздушный и гидравлический компрессоры, элементы подсистемы электропитания, элементы подсистемы электромагнитных дистанционно управляемых клапанов всех типов, распределенную подсистему электропитания, включающую источники электропитания и линии подачи электроэнергии потребителям, блок управления, включающий устройства ввода и вывода информации, вычислительные средства и специальное программное обеспечение для расчета геометрических и электрических параметров пневмогидравлической антенной системы, при этом пневматическая подсистема через дистанционно управляемые электромагнитные воздушные клапаны посредством гибкой трубы соединена с реверсивным воздушным компрессором, второй вход которого соединен с атмосферой, гидравлическая подсистема через дистанционно управляемые электромагнитные гидравлические клапаны двух типов посредством гибкой трубы соединена с реверсивным гидравлическим компрессором, второй выход которого соединён с резервуаром с токопроводящим веществом, дистанционно управляемые электромагнитные воздушные и гидравлические клапаны обоих типов соединены с блоком управления по каналам связи любой физической природы, в распределенной подсистеме электропитания соединены источники электроэнергии с потребителями, блок управления соединен с гидравлическим и воздушным компрессорами, распределенной подсистемой питания, дистанционно управляемыми электромагнитными воздушными и гидравлическими клапанами по каналам связи, образованным приемо-передающими устройствами подсистемы связи.
Технический результат способа управления геометрическими и электрическими параметрами пневмогидравлической антенной системы, достигается тем, что в известном способе, заключающемся в том, что доставляют антенную систему в транспортном положении к месту развертывания, механически закрепляют антенную систему к поверхности, развертывают антенную систему, осуществляют свертывание антенной системы в транспортное положение, дополнительно при развертывании пневмогидравлической антенной системы осуществляют ввод исходных данных в блок управления; в блоке управления определяют геометрические и электрические параметры пневмогидравлической антенной системы; определяют и запоминают набор воздушных и гидравлических электромагнитных клапанов, задействованных в формировании конфигурации с определенными геометрическими и электрическими параметрами, и задействованных в формировании пути подачи токопроводящего вещества; формируют конфигурацию пневмогидравлической быстро развёртываемой антенной системы с требуемыми геометрическими параметрами, для чего в блоке управления поэтапно формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы на открытие воздушных электромагнитных клапанов в соответствии с сохраненными результатами; в блоке управления формируют и посредством элементов подсистемы связи передают по каналам связи любой физической природы команду реверсивному воздушному компрессору на подачу воздуха; осуществляют подачу воздуха реверсивным воздушным компрессором; при помощи датчиков давления пневматической подсистемы измеряют уровень давления в пневматической подсистеме, и посредством элементов подсистемы связи результаты измерений передают в блок управления; при достижении заданного уровня давления формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы на отключение реверсивного воздушного компрессора и закрытие задействованных воздушных клапанов; формируют конфигурацию пневмогидравлической быстро развёртываемой антенной системы с требуемыми электрическими параметрами, для чего в блоке управления поэтапно формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы на открытие гидравлических электромагнитных клапанов в соответствии с сохраненными результатами; в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы реверсивному гидравлическому компрессору на подачу токопроводящего вещества из резервуара; осуществляют подачу токопроводящего вещества реверсивным гидравлическим компрессором; при помощи датчиков давления гидравлической подсистемы измеряют уровень давления в гидравлической подсистеме, и посредством элементов подсистемы связи результаты измерений передают в блок управления; при достижении заданного уровня давления формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы на отключение реверсивного гидравлического компрессора и на закрытие электромагнитного клапана, разделяющего набор клапанов, задействованных в конфигурации, с набором клапанов, задействованных в формировании пути подачи токопроводящего вещества; в блоке управления формируют и посредством элементов подсистемы связи передают команду реверсивному гидравлическому компрессору по каналам связи любой физической природы на включение и откачку из пути подачи токопроводящего вещества в резервуар; осуществляют откачку токопроводящего вещества из элементов гидравлической подсистемы, не задействованных в формировании антенного полотна, реверсивным гидравлическим компрессором в резервуар с последующим отключением компрессора; при свертывании пневмогидравлической быстро развёртываемой антенной системы в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы на открытие гидравлических электромагнитных клапанов из определенного набора клапанов, задействованных в формировании пути подачи токопроводящего вещества; в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы реверсивному гидравлическому компрессору на включение и откачку токопроводящего вещества из гидравлической подсистемы в резервуар; осуществляют откачку токопроводящего вещества реверсивным гидравлическим компрессором в резервуар с последующим отключением компрессора; в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы на закрытие всех гидравлических электромагнитных клапанов; в блоке управления поэтапно формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы на открытие воздушных электромагнитных клапанов в соответствии с сохраненными результатами; в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи любой физической природы реверсивному воздушному компрессору на откачку воздуха осуществляют откачку воздуха из всех задействованных элементов пневматической подсистемы реверсивным воздушным компрессором с последующим отключением компрессора.
б) Причинно-следственная связь между признаками и техническим результатом
Благодаря введению в известный объект совокупности существенных отличительных признаков, заявленные система и способ позволяет изменять геометрические и электрические характеристики антенной системы в автоматизированном режиме после ее развертывания, без учета предыдущей ее конфигурации, уменьшить время развертывания и свертывания, снизить радиолокационную заметность.
Доказательства соответствия заявленного изобретения условиям патентоспособности
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленных системы и способа, отсутствуют. Следовательно, заявленное изобретение соответствует условию патентоспособности «новизна».
Перечисленная новая совокупность существенных признаков достаточна для реализации пневмогидравлической антенной системы и способа управления ее геометрическими и электрическими параметрами.
Результаты поиска известных решений в данной и смежной областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
«Промышленная применимость» способа обусловлена наличием элементной базы, на основе которой могут быть выполнены элементы системы с достижением указанного в изобретении результата.
Краткое описание чертежей
Заявленный способ поясняется чертежами:
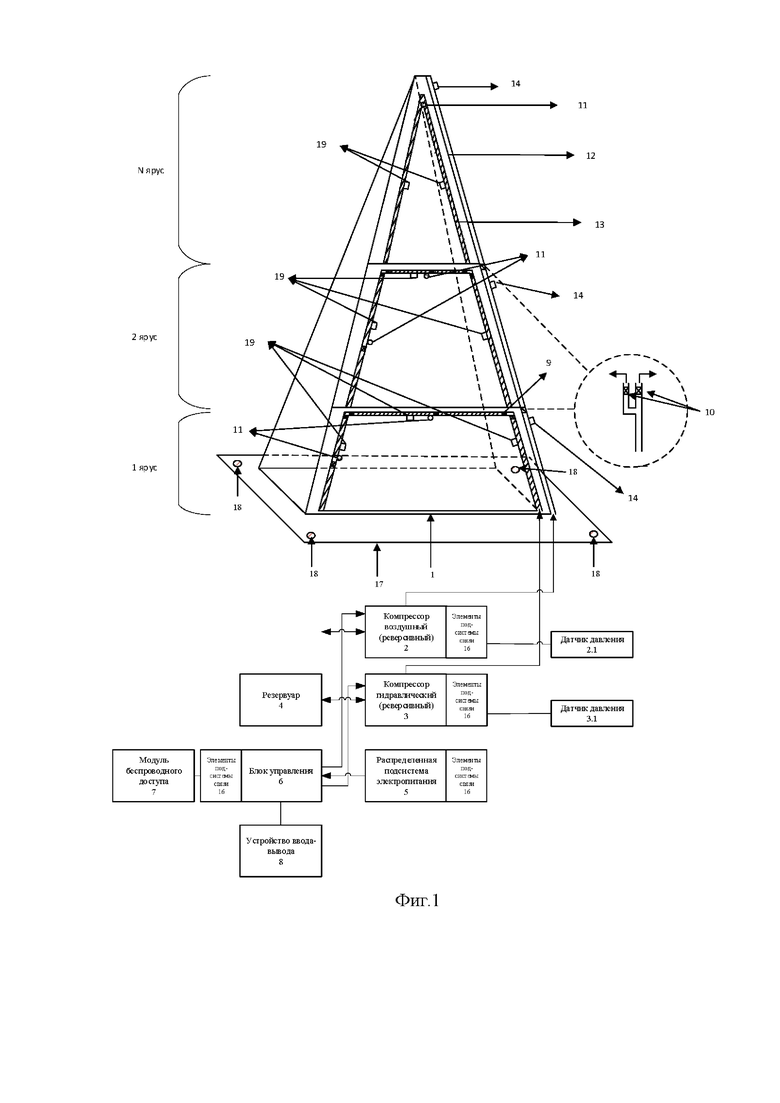
фиг. 1 – обобщенная структурная схема пневмогидравлической антенной системы;
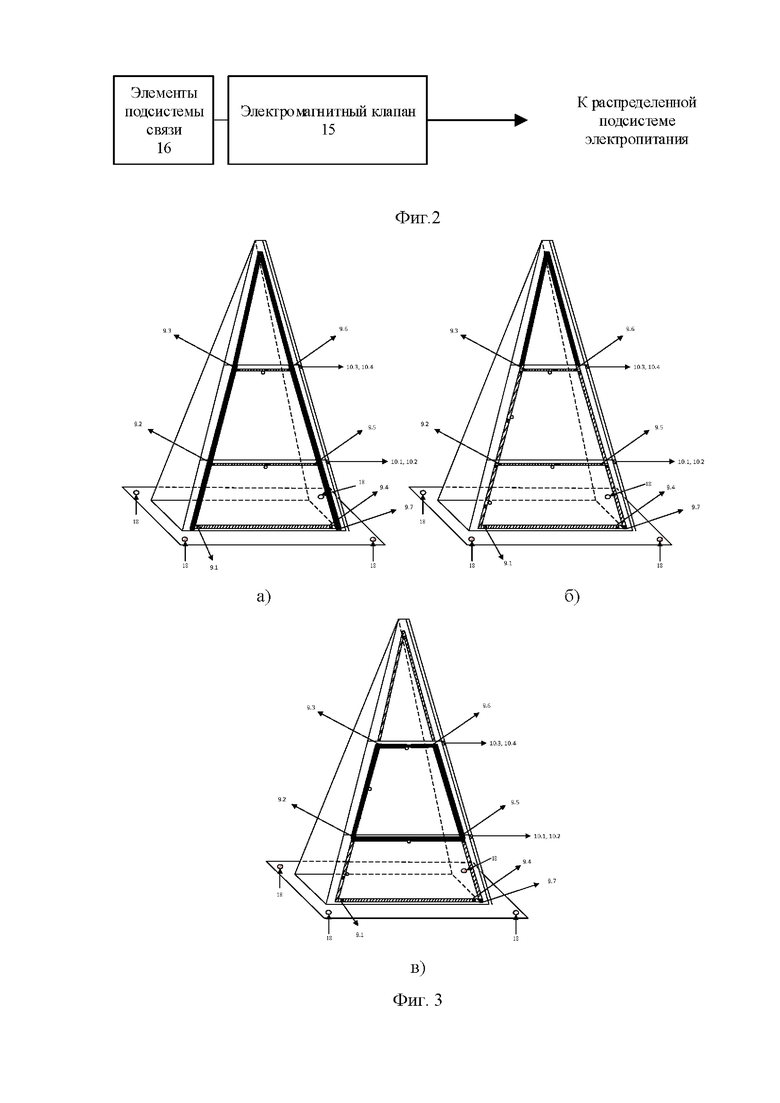
фиг. 2 – обобщенная структурна схема электромагнитного клапана;
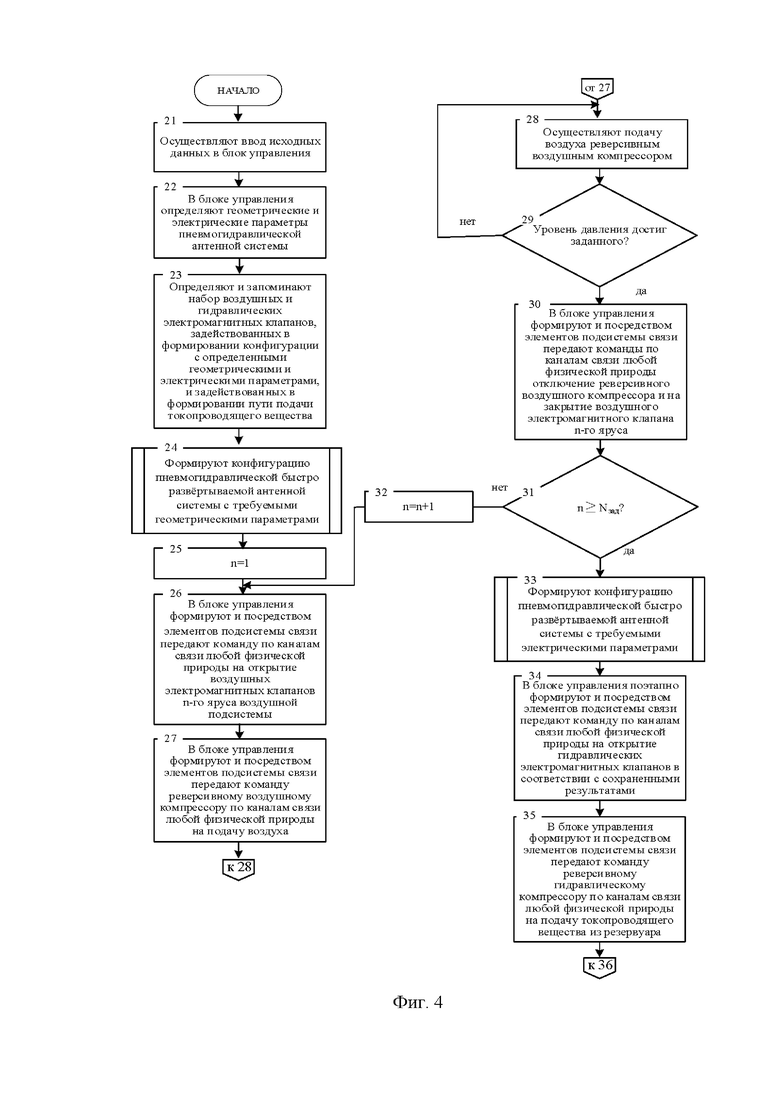
фиг. 3а, 3б, 3в – варианты конфигурации антенного полотна;
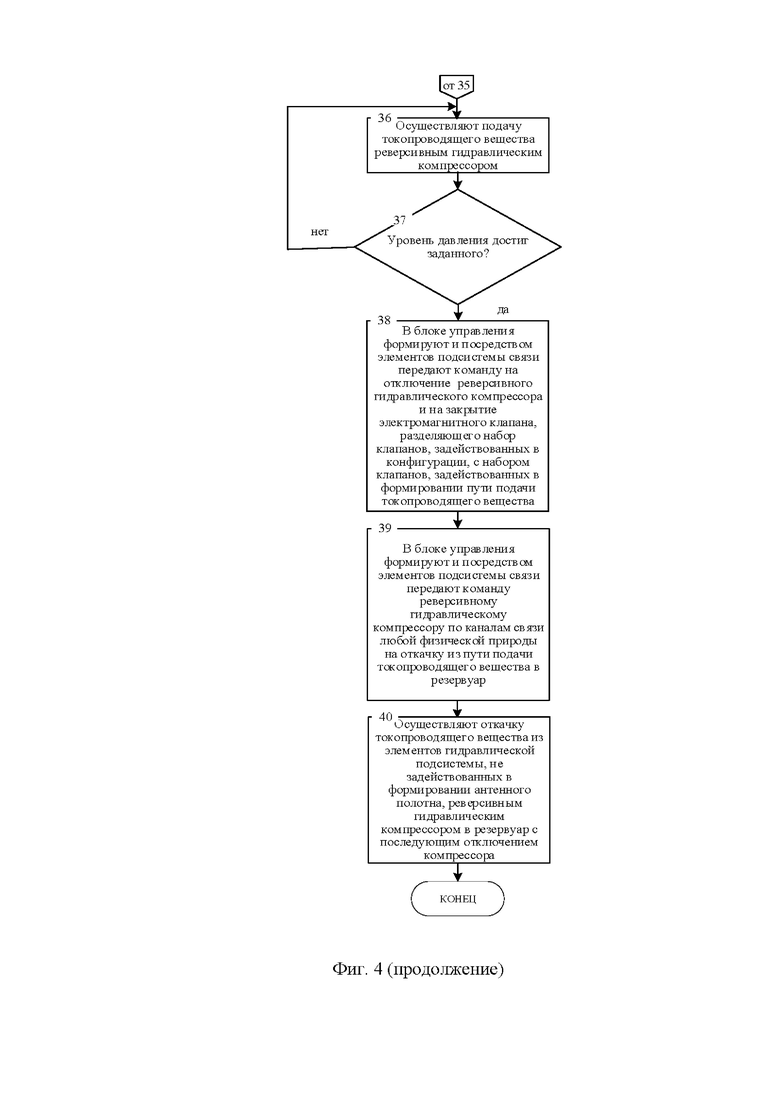
фиг. 4 – блок-схема способа управления пневмогидравлической антенной системой при развертывании;
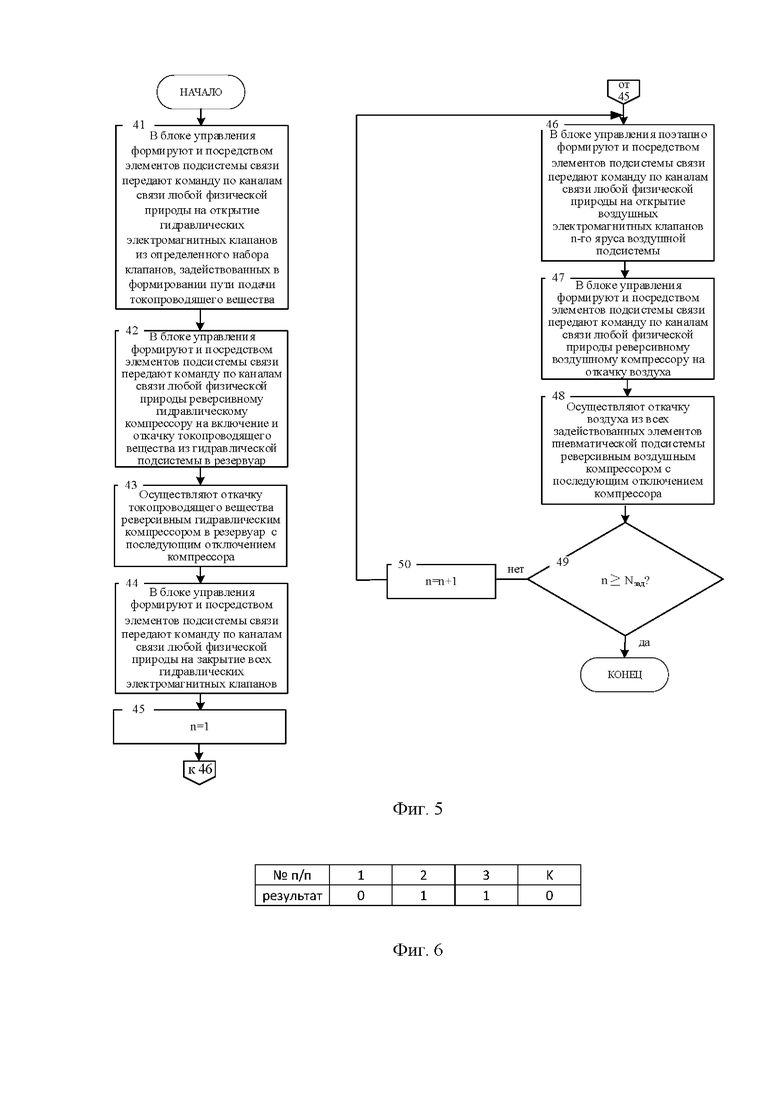
фиг. 5 – блок-схема способа управления пневмогидравлической антенной системой при свертывании;
фиг. 6 – матрица управления воздушными электромагнитными клапанами;
фиг. 7 – матрица управления гидравлическими электромагнитными клапанами;
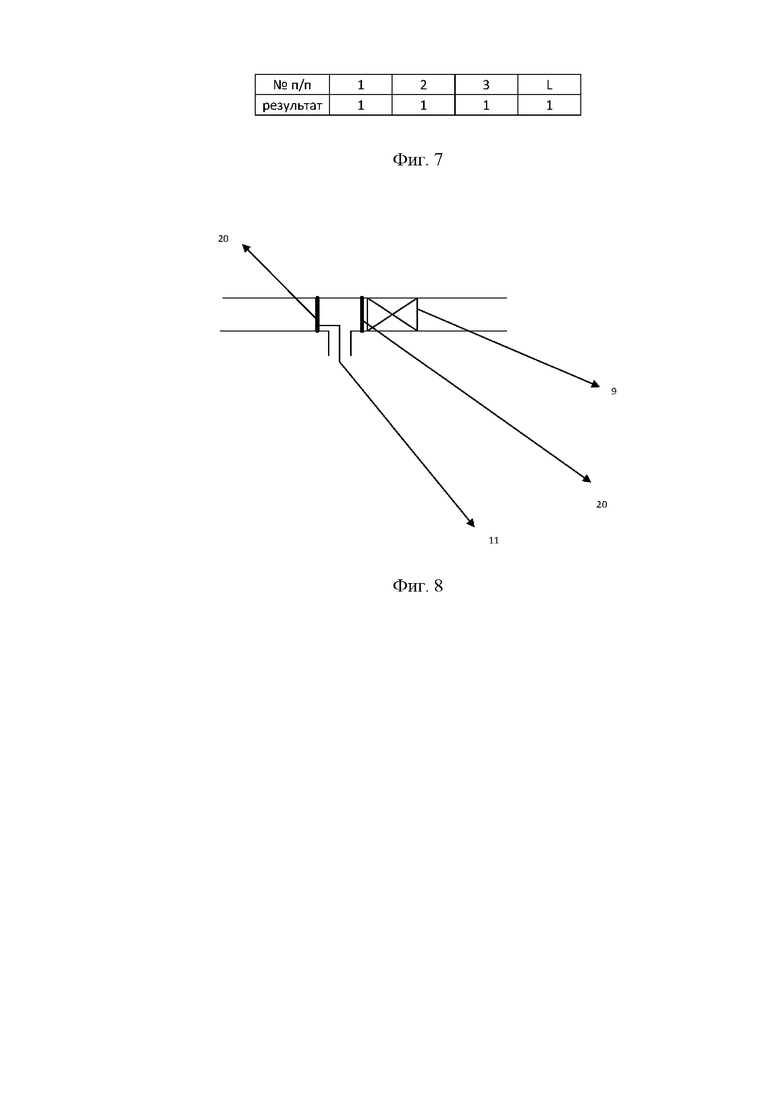
фиг. 8 – схема крепления разъема RS к ребру гидравлической подсистемы;
Осуществление изобретения
Пневмогидравлическая быстро развёртываемая антенная система с автоматизированным изменением геометрических и электрических параметров состоит из:
опорной платформы 17 (фиг.1) с устройствами для механического крепления к поверхности 18 (фиг.1),
пневматической подсистемы 12 (фиг.1), выполненной из полых гибких трубок 1 (фиг.1) из токонепроводящего материала, заполняемых воздухом,
гидравлической подсистемы 13 (фиг.1), выполненной из полых гибких трубок из токонепроводящего материала, заполняемых токопроводящим веществом,
датчиков давления воздуха 14 (фиг 1),
датчиков давления токопроводящего вещества 19 (фиг 1),
распределенной подсистемы электромагнитных дистанционно управляемых клапанов, включающей электромагнитные воздушные клапаны 10 (фиг. 1) и электромагнитные гидравлические клапаны 9 (фиг. 1),
реверсивного воздушного компрессора 2 (фиг 1) с датчиком давления 2.1 (фиг. 1),
реверсивного гидравлического компрессора 3 (фиг 1) с датчиком давления 3.1 (фиг. 1),
резервуара с токопроводящим веществом 4 (фиг. 1),
распределенной подсистемы электропитания 5 (фиг 1),
подсистемы связи 16 (фиг.1),
блока управления 6 (фиг 1) с модулем беспроводного доступа 7 (фиг 1),
устройством ввода-вывода 8 (фиг 1).
Пневматическая подсистема 12 (фиг. 1) через дистанционно управляемые электромагнитные воздушные клапаны 10 (фиг. 1) соединена с реверсивным воздушным компрессором 2 (фиг. 1) и расположена на опорной платформе 17 (фиг. 1), которая может крепиться к земле, стационарным наземным и подвижным объектам. При этом опорная платформа может представлять собой тонкую надувную подушку, выполненную из токонепроводящего материала (например, хлорсульфированный полиэтилен [Электронный реурс URL: https://forma-odezhda.com/encyclopedia/hypalon---vysokoprochnyj-material-ot-kompanii-dupont/. Дата обращения 21.03.2024 г.]), по периметру которой предусмотрены технологические отверстия 18 (фиг. 1) для ее крепления к поверхности.
Гидравлическая подсистема 13 (фиг. 1) через дистанционно управляемые электромагнитные гидравлические клапаны 9 (фиг. 1) соединена с реверсивным гидравлическим компрессором 3 (фиг. 1), который соединён с резервуаром 4 (фиг. 1) с токопроводящим веществом.
Распределенная подсистема электромагнитных дистанционно управляемых клапанов включает воздушные 10 (фиг. 1) и гидравлические электромагнитные клапаны 9 (фиг. 1) с элементами подсистемы связи 16 (фиг.1), установленные на ребрах каждого яруса пневматической 12 (фиг. 1) и гидравлической 13 (фиг. 1) подсистем. Дистанционно управляемые электромагнитные воздушные 10 (фиг. 1) и гидравлические 9 (фиг. 1) электромагнитные клапаны соединены с блоком управления 6 (фиг. 1) посредством элементов подсистемы связи по каналам связи любой физической природы. Электропитание электромагнитных дистанционно управляемых клапанов 15 (фиг.2) осуществляется от распределенной подсистемы электропитания 5 (фиг. 1). На фиг. 2 в качестве электромагнитного клапана 15 может выступать как электромагнитный воздушный 10 (фиг. 1) клапан, так и электромагнитный гидравлический 9 (фиг. 1) клапан.
Распределенная подсистема электропитания 5 (фиг. 1) соединена с блоком управления 6 (фиг. 1), реверсивными воздушным 2 (фиг. 1) и гидравлическим 3 (фиг. 1) компрессорами, с распределенной подсистемой электромагнитных дистанционно управляемых клапанов 15 (фиг. 2) посредством линии подачи электропитания от источника электроэнергии.
Блок управления 6 (фиг. 1) посредством элементов подсистемы связи 16 (фиг. 1) соединен с гидравлическим 3 (фиг. 1) и воздушным 2 (фиг. 1) компрессорами, распределенной подсистемой электропитания 5 (фиг. 1), дистанционно управляемыми электромагнитными воздушными 10 (фиг. 1) и гидравлическими 9 (фиг. 1) клапанами по каналам любой физической природы.
Пневматическая подсистема 12 (фиг. 1) выполняется в виде гибких полых трубок, из токонепроводящего материала (например, хлорсульфированный полиэтилен [Электронный ресурс URL: https://forma-odezhda.com/encyclopedia/hypalon---vysokoprochnyj-material-ot-kompanii-dupont/. Дата обращения 21.03.2024 г.]), выдерживающего заданное давление воздуха [Электронный ресурс URL: https://gidrotgv.ru/opredelenie-tolshhiny-stenki-polietilenovoj-truby-sdr-po-sp-42-103-2003/. Дата обращения 21.03.2024 г.], собранных в N ярусов, при этом каждый ярус состоит из соединенных между собой полых трапеций, а N-ый ярус - из треугольников, представляющих собой одну грань (фиг. 1). Размеры ребер определяются дальностью нахождения корреспондента, размерами препятствий на пути следования электромагнитной волны, а также рабочими частотами приемо-передающего устройства. Грани соединяются между собой и образуют объемную фигуру с общей вершиной. Число граней объемной фигуры определяется в зависимости от расположения корреспондентов, диаграммы направленности и предполагаемой рабочей частоты. Устойчивость конструкции к опрокидыванию определяется в соответствии с расчетами устойчивости сооружения на опрокидывание и обуславливается положением равнодействующей усилий от вертикальных и горизонтальных нагрузок, действующих на опорную платформу антенной системы (например, Электронный ресурс URL: https://monographies.ru/ru/book/section?id=6979. Дата обращения 09.04.2024 г.].
При этом пневматическая подсистема 12 (фиг. 1) через дистанционно управляемые электромагнитные воздушные клапаны 10 (фиг. 1) соединяется с реверсивным воздушным компрессором 2 (фиг. 1) (например, Поршневой компрессор Atlas Copco LT 5-30 Power Pack [Электронный ресурс URL: https://spb.compressortyt.ru/stanciya/kompr/porshnevye-vozdushnye/atlas-copco/lt-5-30-power-pack/. Дата обращения 21.03.2024 г.] с предварительно устанавливаемым уровнем давления. Выбор уровня давления обуславливается погодными условиями (температура воздуха, скорость ветра), массой подымаемой полезной нагрузки, а также геометрическими размерами пневмогидравлической антенной системы.
Гидравлическая подсистема 13 (фиг. 1) выполняется в виде тонких полых гибких и эластичных трубок из токонепроводящего материала, присоединенных к каждому ребру каждого яруса пневматической подсистемы любым способом (фиг. 1), которые заполняются токопроводящим веществом, и используемые в качестве антенного полотна. При этом гидравлическая подсистема соединяется с реверсивным гидравлическим компрессором 3 (фиг. 1) (например, T3-10B-R3D8-SK07K07-№009 [Электронный ресурс URL: http://gidro-mir.ru/catalogue/t3-10b-r3d8-sk07k07-009_58/. Дата обращения 21.03.2024 г.]) с предварительно установленным уровнем давления. Размеры ребер определяются рабочими частотами приемо-передающего устройства.
В качестве токопроводящего вещества может использоваться, например, ртуть, нанопорошок, или их различные сочетания, отвечающие следующим требованиям: краевой угол смачивания – не хуже 128°, поверхностное натяжение по И.И.Жукову – не хуже 485 эрг/см2, с электропроводимостью не хуже 1 040 000 См\м (например, проводящий нано-порошок ITO [Электронный ресурс URL: https://www.huzhengtech.com/ru/conductive-nano-ito-powder.html. Дата обращения 21.03.2024 г.]). Выполнение данных требований обуславливает не смачивание полых гибких трубок, что позволяет производить реконфигурацию гидравлической подсистемы 13 (фиг. 1) без учета предыдущей конфигурации антенной системы, и снижает эффективную площадь рассеивания.
Распределенная подсистема электромагнитных дистанционно управляемых клапанов включает воздушные 10 (фиг. 1) (например, электромагнитный клапан из пластика BRC-07 DN2.5 6 мм [Электронный ресурс URL: https://valve-ko.ru/elektromagnitnyy-klapan-iz-plastika/elektroklapany-iz-plastika-alfa-valve/brc-07-iz-polipropilena-nz-pryamogo-deystviya/brc-07-002/. Дата обращения 21.03.2024 г.]) и гидравлические 9 (фиг. 1) клапаны (например, микроклапан из полимера ASCO 188 [Электронный ресурс URL: https://www.wexon.ru/asco-188/. Дата обращения 21.03.2024 г.]) с элементами подсистемы связи 16 (фиг. 1), установленные на ребрах каждого яруса пневматической 12 (фиг. 1) и гидравлической 13 (фиг. 1) подсистем. Количество гидравлических клапанов и места их установки могут быть определены исходя из требуемых характеристик антенного полотна (например, Расчеты антенн [Электронный ресурс URL: https://3g-aerial.biz/onlajn-raschety/raschety-antenn. Дата обращения 08.05.2024 г.])
Электромагнитные дистанционно управляемые воздушные 10 (фиг. 1) и гидравлические 9 (фиг. 1) клапаны посредством элементов подсистемы связи 16 (фиг.2) соединяются с блоком управления 6 (фиг. 1) по каналам связи любой физической природы (например, на общей шине с кодовым разделением [Электронный ресурс URL: https://www.wexon.ru/asco-188/. Дата обращения 21.03.2024 г.] или с помощью модуля беспроводного доступа протоколами Wi-Fi [Электронный ресурс URL: https://www.wexon.ru/asco-188/. Дата обращения 21.03.2024 г.], ZegBee [Электронный ресурс URL: https://www.wexon.ru/asco-188/. Дата обращения 21.03.2024 г.] и др.) и предназначены для создания необходимой конфигурации пневмогидравлического антенной системы в процессе его эксплуатации.
Кроме того, пневмогидравлическая антенная система включает в своем составе блок управления 6 (фиг. 1,), в качестве которого может использоваться ЭВМ с СПО (например, одноплатный компьютер Raspberry Pi 4B8GBR [Электронный ресурс URL: https://supereyes.ru/catalog/mikrokompyutery_raspberry
_pi/4b_8gb_ram/. Дата обращения 21.03.2024 г.]), с элементами подсистемы связи и модулем беспроводного доступа 7 (фиг.1) для предоставления возможности управления реверсивным воздушным компрессором 2 (фиг. 1), реверсивным гидравлическим компрессором 3 (фиг. 1), воздушными 10 (фиг. 1) и гидравлическими 9 (фиг. 1) клапанами.
Модуль беспроводного доступа 7 (фиг. 1) (например GSM/GPRS модуль Neoway M590E [Электронный ресурс URL: https://roboshop.spb.ru/modules/moduli-besprovodnoj-svyazi/gsm-gprs/m590e-module. Дата обращения 21.03.2024 г.]) предназначен для приема и передачи команд, а также предоставляет возможность дистанционного управления всеми элементами пневмогидравлической атенной системы.
Точка подключения приемо-передающего устройства 11 (фиг. 1) представляет собой SR-разъем (например, разъем BNC под пайку SARMATT SR-BNC-PP [Электронный ресурс URL: https://www.sarmatt.ru/catalog/accessories/razemy/razem-bnc-pod-payku-sarmatt-sr-bnc-pp/. Дата обращения 21.03.2024 г.]). При этом SR-разъем подключается к впрессованной в ребро гидравлической подсистемы 13 (фиг. 1) металлической оплетке 20 (фиг. 9). Согласование гидравлической подсистемы 13 (фиг. 1) с приемо-передающим устройством осуществляется за счет изменения диаметра эластичных трубок с токопроводящим веществом, при помощи установки необходимого давления реверсивным гидравлическим компрессором 3 (фиг. 1) с датчиком давления 3.1 (фиг. 1).
Пневматическая 12 (фиг. 1) и гидравлическая 13 (фиг. 1) подсистемы включают датчики давления воздуха 14 (фиг. 1) и датчики давления токопроводящего вещества 19 (фиг. 1), устанавливаемые на каждом ребре каждого яруса подсистемы, которые соединены с блоком управления 6 (фиг. 1) по каналам связи любой физической природы, предназначенные для контроля давления.
Управление геометрическими и электрическими параметрами пневмогидравлической антенной системы может быть осуществлено при помощи способа, блок-схема которого представлена на фиг. 4, 5.
Предварительно пневмогидравлическую антенную систему доставляют к месту развертывания. Все гидравлические и воздушные клапаны находятся в закрытом состоянии.
Развертывание пневмогидравлической антенной системы осуществляется следующим образом:
В блоке 21 (фиг. 4) закрепляют платформу 17 (фиг. 1, 2) через отверстия 18 (фиг. 1, 2) к поверхности любым способом.
В блоке 22 (фиг. 4) задают исходные данные для обеспечения связи, которыми являются: географический район местности, координаты места развёртывания пневмогидравлической антенной системы, координаты корреспондента, диапазон частот, предельный уровень давления пневматической 12 (фиг. 1) и гидравлической 13 (фиг. 1) подсистем, которые могут вводиться вручную посредством устройства ввода-вывода 8 (фиг. 1), либо дистанционно. Дистанционное управление может осуществляться, например, с помощью модуля беспроводного доступа 7 (фиг. 1) или радиоприемного устройства (например, Nateks Multilink [Электронный ресурс URL: https://www.nateks.ru/catalog/besprovodnye-resheniya/shirokopolosnyy-besprovodnyy-dostup-natek/nateks-multilink. Дата обращения 21.03.2024 г.]).
В блоке 23 (фиг. 4) определяют геометрические параметры пневмогидравлической антенной системы для обеспечения связи.
Геометрические параметры представляют собой конфигурацию пневматической подсистемы 12 (фиг. 1) и определяются количеством задействованных ярусов Nзад из общего числа ярусов Nобщ. При этом определяют набор воздушных 10 (фиг. 1) электромагнитных клапанов, задействованных в формировании конфигурации с определенными геометрическими параметрами.
На фиг. 3а показан вариант набора воздушных электромагнитных клапанов 10.1, 10.2, 10.3, 10.4, задействованный в формировании конфигурации пневмогидравлической антенной системы с определенными геометрическими параметрами пневматической подсистемы 12 (фиг. 1), информация о задействованных воздушных клапанах заносится в матрицу (фиг. 6).
Матрица представляет собой массив данных, в первой строке которого указываются условные номера воздушных электромагнитных клапанов, во второй строке указываются результаты задействования в формировании заданной конфигурации (0 – закрыт, 1 – открыт), в столбцах перечисляются все клапаны антенной системы.
Геометрические параметры могут быть определены при помощи специального программного обеспечения (например ГИС «Оператор» [Электронный ресурс URL: https://gisinfo.ru/products/gisoperator.htm. Дата обращения 21.03.2024 г.]), позволяющего определить азимут на корреспондента, построить профиль интервала между корреспондентами, зоны радиодоступности, исходя из которых определяются параметры пневмогидравлической антенной системы для обеспечения связи.
В блоке 24 (фиг. 4) определяют электрические параметры пневмогидравлической антенной системы для обеспечения связи.
Электрические параметры задаются конфигурацией гидравлической подсистемы 13 (фиг. 1) и определяются набором ребер с токопроводящим веществом, задействованных для обеспечения связи с корреспондентом (корреспондентами) в зависимости от рабочей частоты и азимута, и представляет собой антенное полотно. При этом определяют набор гидравлических электромагнитных клапанов 9 (фиг. 1), участвующих в формировании требуемой конфигурации гидравлической подсистемы 13 (фиг. 1) и вносят необходимые данные в матрицу фиг. 7.
Матрица представляет собой массив данных, в первой строке которого указываются условные номера гидравлических электромагнитных клапанов, во второй строке указываются результаты задействования в формировании заданной конфигурации (0 – закрыт, 1 – открыт), в столбцах перечисляются все клапаны антенной системы.
На фиг. 3а показаны набор гидравлических электромагнитных клапанов 9.1, 9.2, 9.3, 9.4, 9.5, 9.6, задействованный в формировании конфигурации пневмогидравлической антенной системы с определенными электрическими параметрами гидравлической подсистемы 13 (фиг. 1) и набор гидравлических электромагнитных клапанов 9.7, задействованный в формировании пути подачи токопроводящего вещества в гидравлическую подсистему 13 (фиг. 1), а также гидравлический электромагнитный клапан 9.7, разделяющий набор клапанов, задействованных в формировании конфигурации с определенными электрическими параметрами от набора клапанов, задействованных в формировании пути подачи токопроводящего вещества.
В блоке 25 (фиг. 4) формируют конфигурацию пневмогидравлической антенной системы с требуемыми геометрическими параметрами, для чего в блоке 26 (фиг. 4) счетчику количества ярусов присваивают n=1, которая соответствует нижнему ярусу пневматической подсистемы 12 (фиг. 1) пневмогидравлической антенной системы.
В блоке 27 (фиг. 4) формируют и передают команду по каналам связи любой физической природы на открытие воздушных электромагнитных клапанов 10 (фиг. 1) первого яруса воздушной подсистемы 12 (фиг. 1).
При этом команда может представлять собой кодовую последовательность DLL, предназначенную только для воздушного клапана n-го яруса. Кодовая последовательность может быть разработана в генераторе кода SimInTech [Электронный ресурс URL: https://help.simintech.ru/index.html?q=/4_nachalo_raboty/laboratornye_raboty_organizacii/SimInTech/razrabotka_biblioteki_blokov/DAT_modelirovanie_vozvratnogo_klapana.html. Дата обращения 21.03.2024 г.]).
В блоке 28 (фиг. 4) формируют и передают реализованную блоком управления 6 (фиг. 1) команду реверсивному воздушному компрессору 2 (фиг. 1) по каналам связи любой физической природы на подачу воздуха.
В блоке 29 (фиг. 4) осуществляют подачу воздуха реверсивным воздушным компрессором 2 (фиг. 1).
В блоке 30 (фиг. 4) проверяют, достиг ли уровень давления воздуха заданных параметров, для чего в реверсивном воздушном компрессоре 3 (фиг. 1) контролируется давление.
Датчик давления может представлять собой электромагнитный датчик (например, Клапан электромагнитный с датчиком давления MKN [Электронный ресурс URL: https://www.unipar.ru/goods/169644912-klapan_elektromagnitny_s_datchikom_davleniya_mkn_24v. Дата обращения 21.03.2024 г.]) или механический (например, клапан контроля давления [Электронный ресурс URL: https://www.maxprofi.su/gidravlika/klapany-kontrolya-davleniya. Дата обращения 21.03.2024 г.], устанавливаемые отдельно). Если уровень давления не достиг заданного уровня, то возвращаются к блоку 28 (фиг. 4), если достиг – то к блоку 30 (фиг. 4).
В блоке 31 (фиг. 4) формируют и передают команды по каналам связи любой физической природы на закрытие воздушного электромагнитного клапана n-го яруса и отключение реверсивного воздушного компрессора.
В блоке 32 (фиг. 4) сравнивается текущее значение счетчика ярусов n с необходимым числом ярусов Nзад, пневматической подсистемы 12 (фиг. 1), определенным в блоке 22 (фиг. 4). Если n больше или равно, чем Nзад то переходят к блоку 32 (фиг. 4), в обратном случае - к блоку 33 (фиг. 4).
В блоке 33 (фиг. 4) счетчику n добавляют единицу, переходят к блоку 36 (фиг. 4), и повторяют действия, описанные в блоках 26-31 (фиг. 4).
В блоке 34 (фиг. 4) формируют конфигурацию пневмогидравлической антенной системы с требуемыми электрическими параметрами, для чего используют определенный в блоке 23 (фиг. 4) набор гидравлических электромагнитных клапанов 9 (фиг. 1), задействованных в формировании пневмогидравлической антенной системы.
Варианты конфигурации пневмогидравлической антенной системы представлены на фиг. 3а, 3б, 3в, где задействованные в формировании требуемой конфигурации с электрическими параметрами ребра обозначены темным цветом.
В блоке 35 (фиг. 4) формируют и передают команду по каналам связи любой физической природы на открытие гидравлических электромагнитных клапанов из определенного в блоке 23 (фиг. 4) набора клапанов для формирования пневмогидравлической антенной системы с определенными электрическими параметрами.
В блоке 36 (фиг. 4) формируют и передают команду по каналам связи любой физической природы реверсивному гидравлическому компрессору на подачу токопроводящего вещества из резервуара 4 (фиг. 1).
В блоке 37 (фиг. 4) осуществляют подачу токопроводящего вещества из резервуара до предварительно установленного давления с последующим автоматическим отключением реверсивного гидравлического компрессора, для чего в реверсивный гидравлический компрессор встроен датчик давления (например, клапан контроля давления [Электронный ресурс URL: https://www.maxprofi.su/gidravlika/klapany-kontrolya-davleniya/. Дата обращения 21.03.2024 г.]).
В блоке 38 (фиг. 4) формируют и передают команду на закрытие гидравлического электромагнитного клапана 9.7 (фиг. 3а), разделяющего набор клапанов, задействованных в конфигурации, и определенного в блоке 23 (фиг. 4), с набором клапанов, задействованных в формировании пути подачи токопроводящего вещества, и определенного в блоке 23 (фиг. 4).
В блоке 39 (фиг. 4) формируют и передают команду реверсивному гидравлическому компрессору 3 (фиг. 1) по каналам связи любой физической природы на откачку из пути подачи токопроводящего вещества в резервуар 4 (фиг. 1) до предварительно установленного уровня давления.
В блоке 40 (фиг. 4) осуществляется откачка из пути подачи токопроводящего вещества в резервуар 4 (фиг. 1) до предварительно установленного уровня давления.
Реконфигурация пневмогидравлической антенной системы может быть осуществлена посредством полного спуска антенной системы и подъема антенной системы с новыми геометрическими и электрическими характеристиками.
Свертывание пневмогидравлической антенной системы осуществляется при помощи действий, описанных на фиг. 5.
В блоке 41 (фиг. 5) формируют и передают команду по каналам связи любой физической природы на открытие гидравлических электромагнитных клапанов из определенного набора клапанов, задействованных в формировании пути откачки токопроводящего вещества в резервуар 5 (фиг. 1).
В блоке 42 (фиг. 5) формируют и передают команду реверсивному гидравлическому компрессору 3 (фиг. 1) по каналам связи любой физической природы на откачку токопроводящего вещества в резервуар 4 (фиг. 1) до предварительно установленного уровня давления.
В блоке 43 (фиг. 5) осуществляется откачка из пути подачи токопроводящего вещества в резервуар 4 (фиг. 1) до предварительно установленного уровня давления.
В блоке 44 (фиг. 5) формируют и передают команду по каналам связи любой физической природы на закрытие всех гидравлических электромагнитных клапанов, задействованных в формировании конфигурации с требуемыми электрическими параметрами и в формировании пути откачки токопроводящего вещества.
В блоке 45 (фиг. 5) счетчику количества ярусов присваивают n=1, которая соответствует верхнему ярусу пневматической подсистемы 12 (фиг. 1) пневмогидравлической антенной системы.
В блоке 46 (фиг. 5) формируют и передают команду по каналам связи любой физической природы на открытие воздушных электромагнитных клапанов 10 (фиг. 1) первого яруса воздушной подсистемы 12 (фиг. 1).
В блоке 47 (фиг. 5) формируют и передают реализованную блоком управления 6 (фиг. 1) команду реверсивному воздушному компрессору 2 (фиг. 1) по каналам связи любой физической природы на откачку воздуха.
В блоке 48 (фиг. 5) осуществляют откачку воздуха реверсивным воздушным компрессором 2 (фиг. 1) до предварительно установленного уровня давления.
В блоке 49 (фиг. 5) сравнивается текущее значение счетчика ярусов n с необходимым числом ярусов Nзад, пневматической подсистемы 12 (фиг. 1). Если n больше или равно, чем Nзад то завершают свертывание пневмогидравлической антенной системы, в обратном случае - к блоку 50 (фиг. 5).
В блоке 50 (фиг. 5) счетчику n добавляют единицу, переходят к блоку 56 (фиг. 5), и повторяют действия, описанные в блоках 46-49 (фиг. 5).
Таким образом, за счет создания антенной системы с единой пневмогидравлической конструкцией, заполняемой токопроводящим веществом, позволяющей в автоматизированном режиме изменять геометрические и электрические параметры путем дистанционного управления электромагнитными воздушными и гидравлическими клапанами, обеспечивается достижение технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ моделирования подключения мобильных элементов корпоративной системы управления к стационарной сети связи | 2020 |
|
RU2746670C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ МНОЖЕСТВА НЕЗАВИСИМЫХ ВИРТУАЛЬНЫХ СЕТЕЙ СВЯЗИ НА ОСНОВЕ ОДНОЙ ФИЗИЧЕСКОЙ СЕТИ | 2020 |
|
RU2748139C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СЕТИ СВЯЗИ С ПАМЯТЬЮ | 2020 |
|
RU2734503C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СКРЫТНОСТИ ФУНКЦИОНИРОВАНИЯ ЭЛЕМЕНТОВ СИСТЕМЫ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ РЕСУРСЫ СЕТИ СВЯЗИ ОБЩЕГО ПОЛЬЗОВАНИЯ | 2021 |
|
RU2772548C1 |
| Способ моделирования оптимального варианта топологического размещения множества информационно взаимосвязанных абонентов на заданном фрагменте сети связи общего пользования | 2018 |
|
RU2690213C1 |
| СПОСОБ ФИЗИЧЕСКОГО РАЗНЕСЕНИЯ ТРАКТОВ ПРИЕМА И ПЕРЕДАЧИ ДАННЫХ В УСЛОВИЯХ ДЕСТРУКТИВНЫХ ПРОГРАММНЫХ ВОЗДЕЙСТВИЙ | 2020 |
|
RU2751987C1 |
| СПОСОБ УСТОЙЧИВОЙ МАРШРУТИЗАЦИИ ДАННЫХ В ВИРТУАЛЬНОЙ СЕТИ СВЯЗИ | 2021 |
|
RU2757781C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЭЛЕМЕНТОВ СЛОЖНОЙ СИСТЕМЫ В ПЕРЕМЕННЫХ УСЛОВИЯХ | 2020 |
|
RU2726027C1 |
| СПОСОБ УПРАВЛЕНИЯ СОСТОЯНИЕМ СЛОЖНОГО ОБЪЕКТА | 2020 |
|
RU2748778C1 |
| СПОСОБ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ ВИРТУАЛЬНОЙ СЕТИ СВЯЗИ КОРПОРАТИВНОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 2020 |
|
RU2750950C1 |
Изобретение относится к радиотехнике, а именно к конструктивному выполнению пневмогидравлической быстро развертываемой антенно-фидерной системы с автоматизированным изменением геометрических и электрических параметров. Технический результат - возможность изменения геометрических и электрических характеристик антенной системы в автоматизированном режиме после ее развертывания, без учета предыдущей конфигурации, уменьшение времени развертывания и свертывания, уменьшение радиолокационной заметности. Технический результат достигается за счет разработки антенной системы с пневмогидравлической конструкцией, заполняемой токопроводящим веществом, позволяющей изменять ее геометрические и электрические параметры путем дистанционного управления электромагнитными воздушными и гидравлическими клапанами. 2 н.п. ф-лы, 8 ил.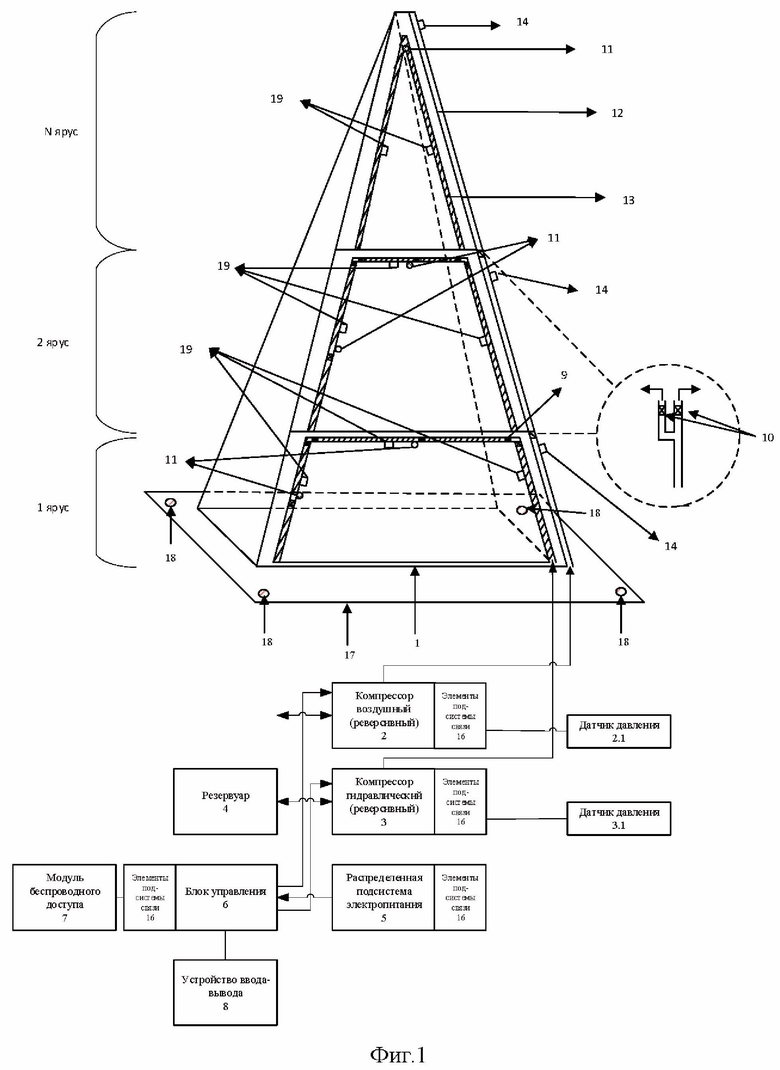
1. Пневмогидравлическая антенная система с автоматизированным изменением геометрических и электрических параметров, содержащая пневматическую подсистему, выполненную из полых гибких трубок из токонепроводящего материала, заполняемых воздухом, собранных в N ярусов, включающую датчики давления воздуха, расположенные на каждом ярусе, при этом каждый ярус состоит из соединенных между собой полых трапеций, а N-й ярус - из треугольников, при этом нижняя часть первого яруса представляет собой опорную платформу с устройствами для механического крепления к поверхности, гидравлическую подсистему, выполненную из полых гибких трубок из токонепроводящего материала, заполняемых токопроводящим веществом для формирования антенного полотна требуемой конфигурации, прикрепленных к ребрам каждого яруса пневматической подсистемы, со встроенными ВЧ-разъемами в ребрах гидравлической подсистемы, контакты которых подключены к токопроводящей оплетке по всему диаметру ребер в точке подключения и разделены гидравлическими электромагнитными клапанами, включающую датчики давления токопроводящего вещества, расположенные на каждом ребре, распределенную подсистему электромагнитных дистанционно управляемых клапанов, встроенных в ребра каждого яруса пневматической и гидравлической подсистем, управляемых по каналам связи, при этом устанавливают электромагнитные клапаны гидравлической подсистемы двух типов: электромагнитные гидравлические клапаны со встроенным ВЧ-разъемом для подключения приемо-передающего устройства и электромагнитные гидравлические клапаны без ВЧ-разъема, подсистему связи, включающую приемо-передающие устройства для образования каналов связи, при этом элементы подсистемы связи встроены в блок управления, реверсивные воздушный и гидравлический компрессоры, элементы подсистемы электропитания, элементы подсистемы электромагнитных дистанционно управляемых клапанов всех типов, распределенную подсистему электропитания, включающую источники электропитания и линии подачи электроэнергии потребителям, блок управления, включающий устройства ввода и вывода информации, вычислительные средства и программное обеспечение для расчета геометрических и электрических параметров пневмогидравлической антенной системы, при этом пневматическая подсистема через дистанционно управляемые электромагнитные воздушные клапаны посредством гибкой трубы соединена с реверсивным воздушным компрессором, второй вход которого соединен с атмосферой, гидравлическая подсистема через дистанционно управляемые электромагнитные гидравлические клапаны двух типов посредством гибкой трубы соединена с реверсивным гидравлическим компрессором, второй выход которого соединен с резервуаром с токопроводящим веществом, дистанционно управляемые электромагнитные воздушные и гидравлические клапаны обоих типов соединены с блоком управления по каналам связи, в распределенной подсистеме электропитания соединены источники электроэнергии с потребителями, блок управления соединен с гидравлическим и воздушным компрессорами, распределенной подсистемой питания, дистанционно управляемыми электромагнитными воздушными и гидравлическими клапанами по каналам связи, образованным приемо-передающими устройствами подсистемы связи.
2. Способ управления геометрическими и электрическими параметрами пневмогидравлической антенной системы, заключающийся в том, что доставляют антенную систему в транспортном положении к месту развертывания, механически закрепляют антенную систему к поверхности, развертывают антенную систему, осуществляют свертывание антенной системы в транспортное положение, отличающийся тем, что при развертывании пневмогидравлической антенной системы осуществляют ввод исходных данных в блок управления; в блоке управления определяют геометрические и электрические параметры пневмогидравлической антенной системы; определяют и запоминают набор воздушных и гидравлических электромагнитных клапанов, задействованных в формировании конфигурации с определенными геометрическими и электрическими параметрами, и задействованных в формировании пути подачи токопроводящего вещества; формируют конфигурацию пневмогидравлической антенной системы с требуемыми геометрическими параметрами, для чего в блоке управления поэтапно формируют и посредством элементов подсистемы связи передают команду по каналам связи на открытие воздушных электромагнитных клапанов в соответствии с сохраненными результатами; в блоке управления формируют и посредством элементов подсистемы связи передают по каналам связи команду реверсивному воздушному компрессору на подачу воздуха; осуществляют подачу воздуха реверсивным воздушным компрессором; при помощи датчиков давления пневматической подсистемы измеряют уровень давления в пневматической подсистеме, и посредством элементов подсистемы связи результаты измерений передают в блок управления; при достижении заданного уровня давления формируют и посредством элементов подсистемы связи передают команду по каналам связи на отключение реверсивного воздушного компрессора и закрытие задействованных воздушных клапанов; формируют конфигурацию пневмогидравлической антенной системы с требуемыми электрическими параметрами, для чего в блоке управления поэтапно формируют и посредством элементов подсистемы связи передают команду по каналам связи на открытие гидравлических электромагнитных клапанов в соответствии с сохраненными результатами; в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи реверсивному гидравлическому компрессору на подачу токопроводящего вещества из резервуара; осуществляют подачу токопроводящего вещества реверсивным гидравлическим компрессором; при помощи датчиков давления гидравлической подсистемы измеряют уровень давления в гидравлической подсистеме, и посредством элементов подсистемы связи результаты измерений передают в блок управления; при достижении заданного уровня давления формируют и посредством элементов подсистемы связи передают команду по каналам связи на отключение реверсивного гидравлического компрессора и на закрытие электромагнитного клапана, разделяющего набор клапанов, задействованных в конфигурации, с набором клапанов, задействованных в формировании пути подачи токопроводящего вещества; в блоке управления формируют и посредством элементов подсистемы связи передают команду реверсивному гидравлическому компрессору по каналам связи на включение и откачку из пути подачи токопроводящего вещества в резервуар; осуществляют откачку токопроводящего вещества из элементов гидравлической подсистемы, не задействованных в формировании антенного полотна, реверсивным гидравлическим компрессором в резервуар с последующим отключением компрессора; при свертывании пневмогидравлической быстро развертываемой антенной системы в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи на открытие гидравлических электромагнитных клапанов из определенного набора клапанов, задействованных в формировании пути подачи токопроводящего вещества; в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи реверсивному гидравлическому компрессору на включение и откачку токопроводящего вещества из гидравлической подсистемы в резервуар; осуществляют откачку токопроводящего вещества реверсивным гидравлическим компрессором в резервуар с последующим отключением компрессора; в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи на закрытие всех гидравлических электромагнитных клапанов; в блоке управления поэтапно формируют и посредством элементов подсистемы связи передают команду по каналам связи на открытие воздушных электромагнитных клапанов в соответствии с сохраненными результатами; в блоке управления формируют и посредством элементов подсистемы связи передают команду по каналам связи реверсивному воздушному компрессору на откачку воздуха; осуществляют откачку воздуха из всех задействованных элементов пневматической подсистемы реверсивным воздушным компрессором с последующим отключением компрессора.
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНЫМ ЭЛЕМЕНТОМ | 2014 |
|
RU2570679C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 1997 |
|
RU2115977C1 |
| ТЕЛЕСКОПИЧЕСКАЯ МАЧТА | 2013 |
|
RU2676398C2 |
| Газогенератор для порошкового огнетушителя | 1979 |
|
SU860775A1 |
| СПОСОБ ВЫДЕЛЕНИЯ РЕЗИНЫ ИЗ ИЗНОШЕННЫХ АВТОШИН И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203181C2 |

