Изобретение относится к антенной технике, в частности к гидравлическим приводам мобильных антенных установок (АУ) с подъемной мачтой.
Известен гидравлический привод, используемый в мобильной антенной установке по патенту RU №2115977 (H 01 Q 1/08, 1998 г.). Известная мобильная АУ содержит контейнер с аппаратурой, конструктивно совмещенный с антенной системой, включающей снабженную гидроцилиндром поворота подъемную мачту с антенной. Контейнер снабжен выносными поворачивающимися опорами с гидродомкратами, устанавливаемыми с возможностью контактирования с грунтом и выполнен с возможностью размещения на автотранспортном средстве. При развертывании АУ контейнер (антенную систему) вывешивают и горизонтируют с помощью гидравлического привода, включающего упомянутые гидродомкраты.
Однако гидравлический привод известной мобильной АУ с подъемной мачтой не предусматривает возможности автоматического поддержания вертикальности азимутальной оси наведения АУ в рабочем положении последней.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является гидравлический привод по авт. св. SU №1201216 А, В 66 F 11/04, 1985 г. Известный гидравлический привод содержит систему управления, установленные на шасси транспортного средства гидродомкраты и насосный агрегат с баком. Насосный агрегат через трехпозиционный гидрораспределитель, напорные и сливные магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра подъема подъемной мачты, включающей рычаги с взаимным шарнирным сочленением, образующие верхнюю и нижнюю секции подъемной мачты. На верхней секции подъемной мачты с возможностью поворота в вертикальной плоскости шарнирно закреплена опорная платформа. Гидроцилиндр подъема шарнирно соединен соответственно со смонтированным на транспортном средстве поворотным основанием и нижней секцией подъемной мачты. Между гидроцилиндром подъема и трехпозиционным гидрораспределителем подключен гидрозамок. Подобный гидравлический привод может быть использован в мобильной АУ в качестве гидравлического привода для вывешивания шасси транспортного средства и для подъема подъемной мачты с антенной на заданный уровень по высоте.
Однако известный гидравлический привод имеет ограниченные функциональные возможности. В частности, он не решает задачу обеспечения достаточно точного горизонтирования шасси транспортного средства, что существенно для обеспечения устойчивости АУ в рабочем положении. Кроме того, в результате неточного горизонтирования шасси транспортного средства снижается точность наведения АУ. Вместе с этим известный гидравлический привод не предусматривает возможности обеспечения стабилизации положения опорной платформы, закрепленной на верхней секции подъемной мачты.
Задачей настоящего изобретения является создание многофункционального гидравлического привода компактной мобильной АУ с подъемной мачтой, обеспечивающего возможность в автоматическом режиме быстрого развертывания-свертывания АУ при передислокации, а также обеспечивающего в автоматическом режиме стабилизацию положения установленной на подъемной мачте платформы с антенным модулем.
Указанная задача решается благодаря тому, что известный гидравлический привод, содержащий систему управления, установленные на шасси транспортного средства гидродомкраты и насосный агрегат с баком, при этом насосный агрегат через трехпозиционный гидрораспределитель, напорные и сливные магистрали, гидравлически связан со штоковой и поршневой полостями гидроцилиндра подъема подъемной мачты, включающей рычаги с взаимным шарнирным сочленением, образующие верхнюю и нижнюю секции подъемной мачты, причем на верхней секции подъемной мачты с возможностью поворота в вертикальной плоскости шарнирно закреплена опорная платформа, при этом гидроцилиндр подъема шарнирно соединен соответственно со смонтированным на транспортном средстве основанием и нижней секцией подъемной мачты, а между гидроцилиндром подъема и трехпозиционным гидрораспределителем подключен первый гидрозамок, согласно изобретению дополнительно содержит другие трехпозиционные гидрораспределители с электромагнитным управлением. При этом каждый гидродомкрат гидравлически связан с насосным агрегатом через соответствующие первый и второй трехпозиционные гидрораспределители с электромагнитным управлением. Напорная магистраль, связывающая насосный агрегат с гидродомкратом, имеет возможность сообщения с поршневой полостью гидродомкрата через первый трехпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции и первый регулятор расхода. Первый регулятор расхода установлен в соответствующей магистрали с помощью четырех блокировочных обратных клапанов. При этом последние установлены с возможностью обеспечения неизменного направления движения жидкости через первый регулятор расхода независимо от направления движения штока гидродомкрата. Напорная магистраль, связывающая насосный агрегат с гидродомкратом, имеет возможность сообщения с поршневой полостью гидродомкрата также через второй трехпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции и дополнительно введенный дроссель. При этом упомянутая напорная магистраль имеет возможность сообщения со штоковой полостью гидродомкрата соответственно через первый и второй трехпозиционный гидрораспределитель с электромагнитным управлением в другой позиции каждого из них. К магистрали, сообщающей поршневую полость гидродомкрата соответственно с первым регулятором расхода и дросселем, подключен дополнительно введенный сигнализатор давления, который электрически связан с системой управления. Первый и второй трехпозиционные гидрораспределители с электромагнитным управлением и насосный агрегат через систему управления электрически связаны с датчиками горизонтирования, которые установлены на шасси транспортного средства. Гидравлический привод снабжен по меньшей мере одним гидроцилиндром поворота опорной платформы, который шарнирно соединен соответственно с опорной платформой и верхней секцией подъемной мачты. Гидроцилиндр поворота имеет двухсторонний гидрозамок и гидравлически связан с насосным агрегатом через третий и четвертый трехпозиционные гидрораспределители с электромагнитным управлением. Напорная магистраль, связывающая насосный агрегат с гидроцилиндром поворота, имеет возможность сообщения с поршневой полостью гидроцилиндра поворота через третий трехпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции, второй регулятор расхода и дополнительно введенный регулируемый дроссель, кинематически связанный с гравитационным маятником. При этом второй регулятор расхода установлен в соответствующей магистрали с помощью четырех других блокировочных обратных клапанов. Последние установлены с возможностью обеспечения неизменного направления движения жидкости через второй регулятор расхода независимо от направления движения штока гидроцилиндра поворота. Напорная магистраль, связывающая насосный агрегат с гидроцилиндром поворота, имеет возможность сообщения со штоковой полостью гидроцилиндра поворота в другой позиции третьего трехпозиционного гидрораспределителя с электромагнитным управлением, а также имеет возможность сообщения с поршневой полостью гидроцилиндра поворота через четвертый трехпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции и упомянутый регулируемый дроссель, кинематически связанный с гравитационным маятником, и имеет возможность сообщения со штоковой полостью гидроцилиндра поворота через четвертый трехпозиционный гидрораспределитель с электромагнитным управлением в другой его позиции. Гидравлический привод снабжен по меньшей мере одним двухштоковым гидроцилиндром. Корпус двухштокового гидроцилиндра шарнирно закреплен на опорной платформе, один шток шарнирно закреплен на дополнительно введенной промежуточной платформе, которая шарнирно закреплена на опорной платформе с возможностью поворота относительно оси, скрещивающейся под прямым углом с осью поворота опорной платформы, а другой шток соединен с нуль-установителем двухстороннего действия, который смонтирован на корпусе двухштокового гидроцилиндра. Двухштоковый гидроцилиндр имеет двухсторонний гидрозамок и гидравлически связан с насосным агрегатом через пятый и шестой трехлозиционные гидрораспределители с электромагнитным управлением. Напорная магистраль, связывающая насосный агрегат с двухштоковым гидроцилиндром, имеет возможность сообщения с одной из штоковых полостей двухштокового гидроцилиндра через пятый трехпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции и регулятор расхода с обратным клапаном, возможность сообщения с другой штоковой полостью двухштокового гидроцилиндра через пятый трехпозиционный гидрораспределитель с электромагнитным управлением в другой его позиции и другой регулятор расхода с обратным клапаном, а также возможность сообщения с каждой из штоковых полостей двухштокового гидроцилиндра через шестой трехпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции и соответствующий односторонний гидрозамок, связанный со штоковой полостью двухштокового гидроцилиндра. При этом третий, четвертый, пятый и шестой трехпозиционные гидрораспределители с электромагнитным управлением и насосный агрегат через систему управления электрически связаны с другими датчиками горизонтирования, которые установлены на промежуточной платформе. Такое исполнение гидравлического привода мобильной АУ позволяет в автоматическом режиме осуществить быстрое вывешивание и горизонтирование шасси транспортного средства (а по существу - мобильной АУ в целом), быстрый подъем антенного модуля на заданную высоту, обеспечить вертикальность азимутальной оси наведения антенны путем горизонтирования промежуточной платформы, несущей ОПУ антенны, и, при необходимости, автоматически осуществлять подгоризонтирование промежуточной платформы в период «дежурства» АУ, что, в конечном счете, обеспечивает повышение точности наведения АУ. Таким образом, изобретение позволяет осуществлять в автоматическом режиме быстрое развертывание-свертывание мобильной АУ с подъемной мачтой при передислокации, позволяет расширить функциональные возможности гидравлического привода мобильной АУ с подъемной мачтой и обеспечивает повышение точности наведения мобильной АУ.
Вместе с этим насосный агрегат включает два предохранительных клапана разной настройки на давление срабатывания и два насоса разной производительности. Насосы сообщены с общей напорной магистралью, связанной с упомянутым гидроцилиндром подъема. Каждый насос имеет клапан разгрузки, гидравлически управляемый соответствующим первым двухпозиционным гидрораспределителем с электромагнитным управлением, подключенным к общей напорной магистрали. При этом к последней подключены предохранительный клапан большей настройки на давление срабатывания и второй двухпозиционный гидрораспределитель с электромагнитным управлением. Общая напорная магистраль через второй двухпозиционный гидрораспределитель с электромагнитным управлением в одной его позиции имеет возможность сообщения с напорной магистралью, сообщающей насосный агрегат соответственно с гидродомкратами, гидропилиндром поворота опорной платформы и с упомянутым двухштоковым гидроцилиндром, установленным между опорной и промежуточной платформами. Причем к последней упомянутой напорной магистрали подключен предохранительный клапан меньшей настройки на давление срабатывания. Благодаря использованию в насосном агрегате гидравлического привода двух насосов разной производительности изобретение позволяет в период «дежурства» мобильной АУ отказаться от запуска достаточно мощного штатного двигателя шасси транспортного средства и использовать небольшой дизель малой мощности, что позволяет снизить энергопотребление гидравлического привода.
Кроме того, гидравлический привод снабжен вторым гидроцилиндром подъема, который установлен параллельно первому гидроцилиндру подъема и шарнирно соединен соответственно со смонтированным на транспортном средстве основанием и нижней секцией подъемной мачты. При этом гидроцилиндры подъема сообщены с насосным агрегатом через общий трехпозиционный гидрораспределитель с электромагнитным управлением. Между последним и вторым гидроцилиндром подъема подключен второй гидрозамок. Первый и второй гидрозамки выполнены односторонними. Выполнение гидравлического привода с двумя гидроцилиндрами подъема повышает его надежность и вместе с тем позволяет сделать более компактными как сам привод, так и мобильную АУ в целом.
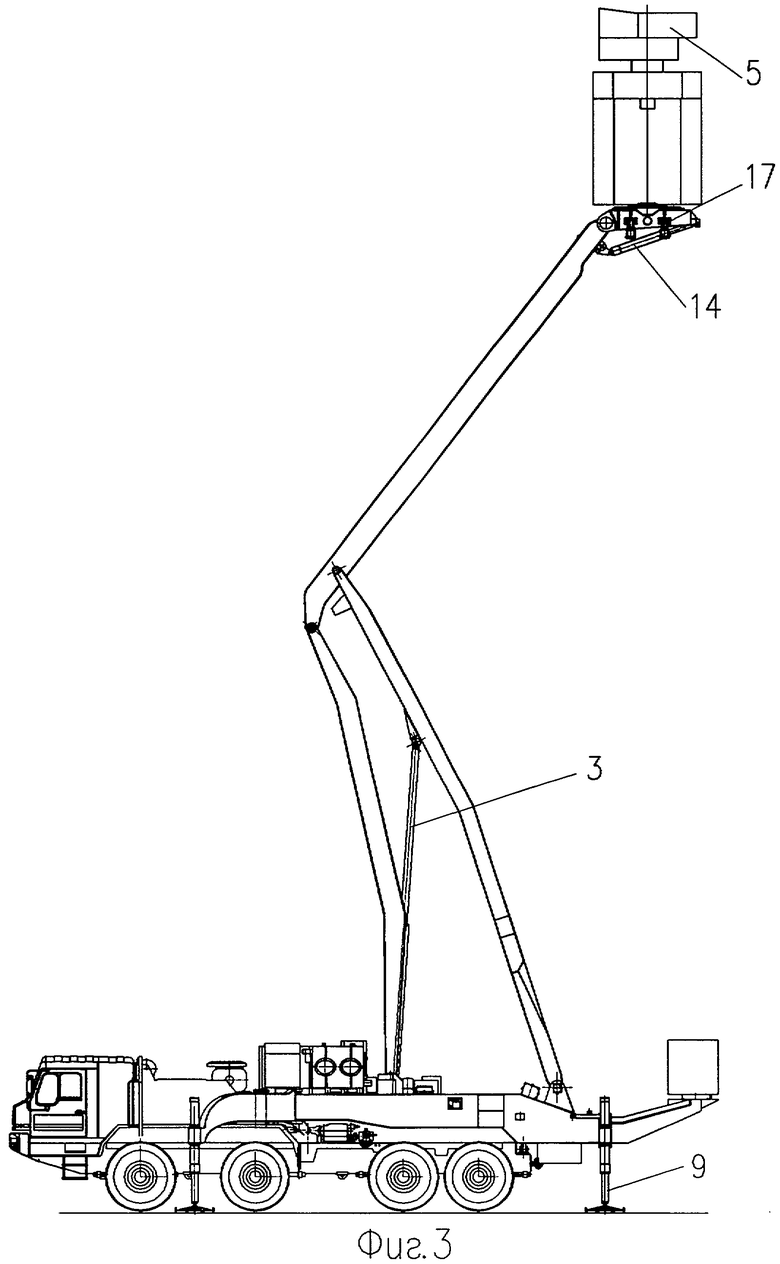
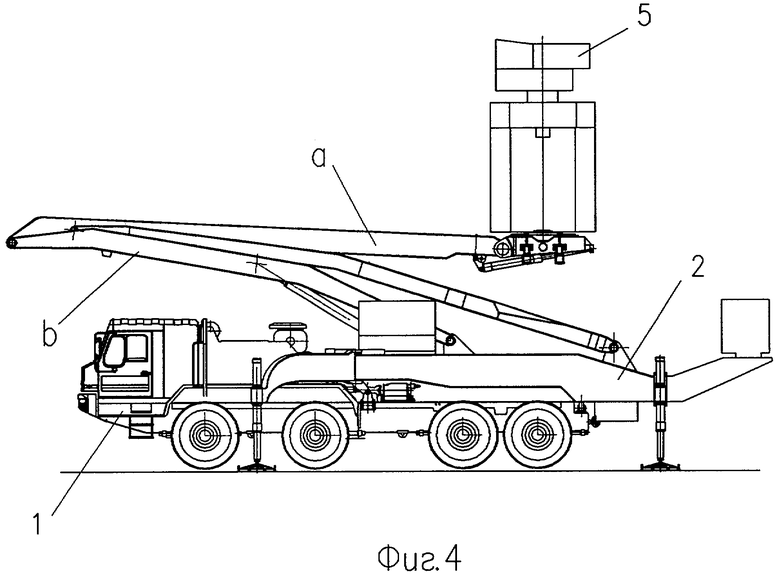
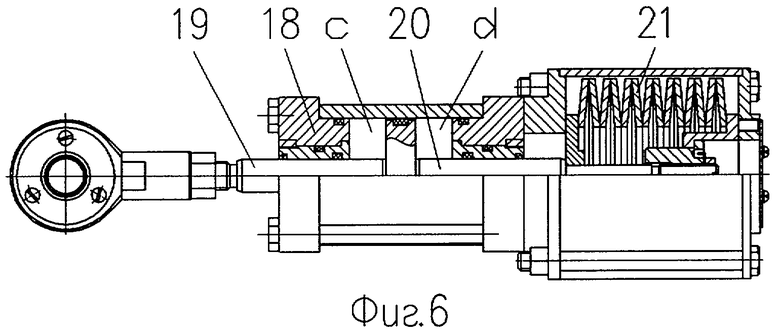
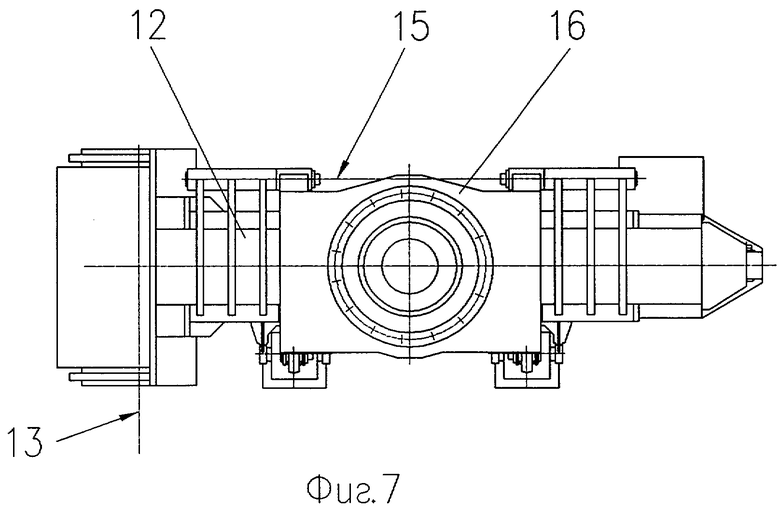
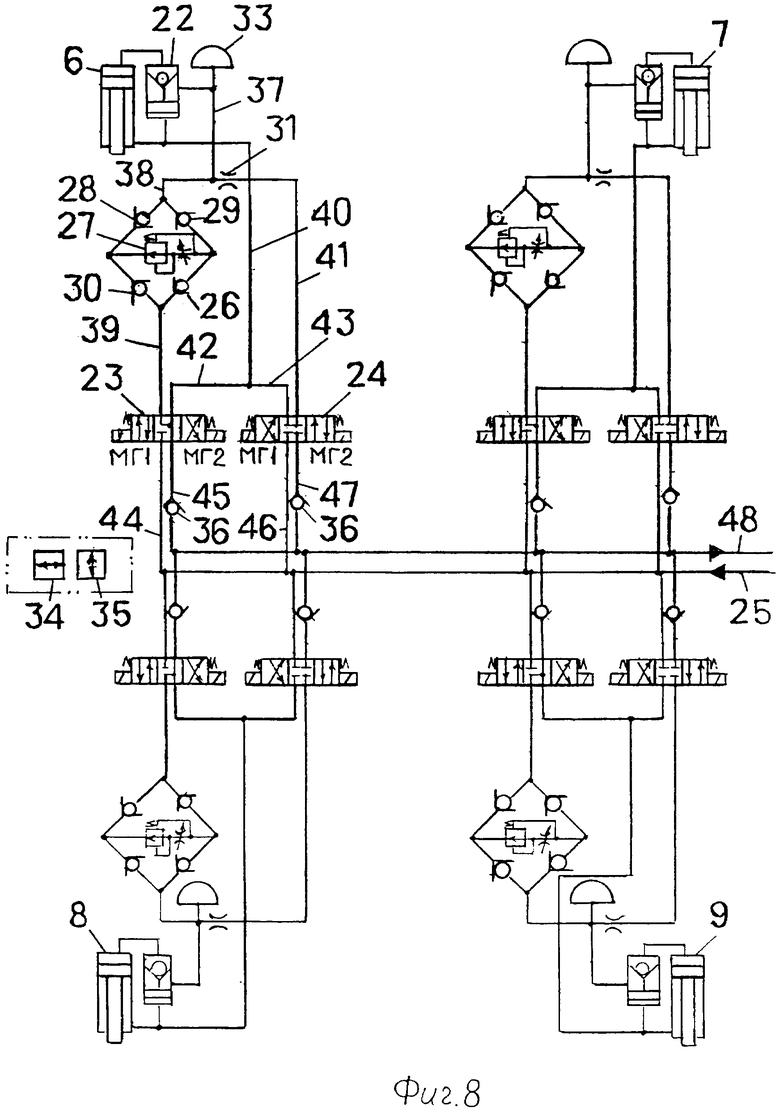
На фиг.1 показана мобильная АУ с подъемной мачтой в походном положении, общий вид; на фиг.2 - мобильная АУ в развернутом положении, когда подъемная мачта находится в крайнем нижнем положении, вид в плане; на фиг.3 - мобильная АУ в рабочем положении, когда подъемная мачта находится в крайнем верхнем положении, общий вид; на фиг.4 - мобильная АУ, когда подъемная мачта находится в промежуточном положении, общий вид; на фиг.5 - верхняя секция подъемной мачты с опорной и промежуточной платформами и ОПУ антенны в рабочем положении, вид с боку; на фиг.6 - двухштоковый гидроцилиндр с пружинным нуль-установителем, продольный разрез по А-А на фиг.5, повернуто; на фиг.7 - опорная и промежуточная платформы, разрез по Б-Б на фиг.5; на фиг.8 - часть принципиальной схемы гидравлического привода, включающая элементы гидросистемы, посредством которых обеспечиваются вывешивание и горизонтирование шасси транспортного средства; на фиг.9 - часть принципиальной схемы гидравлического привода, включающая элементы гидросистемы, посредством которых обеспечивается горизонтирование промежуточной платформы; на фиг.10 - часть принципиальной схемы гидравлического привода, включающая насосный агрегат и элементы гидросистемы, посредством которых обеспечиваются подъем и опускание подъемной мачты с антенной;
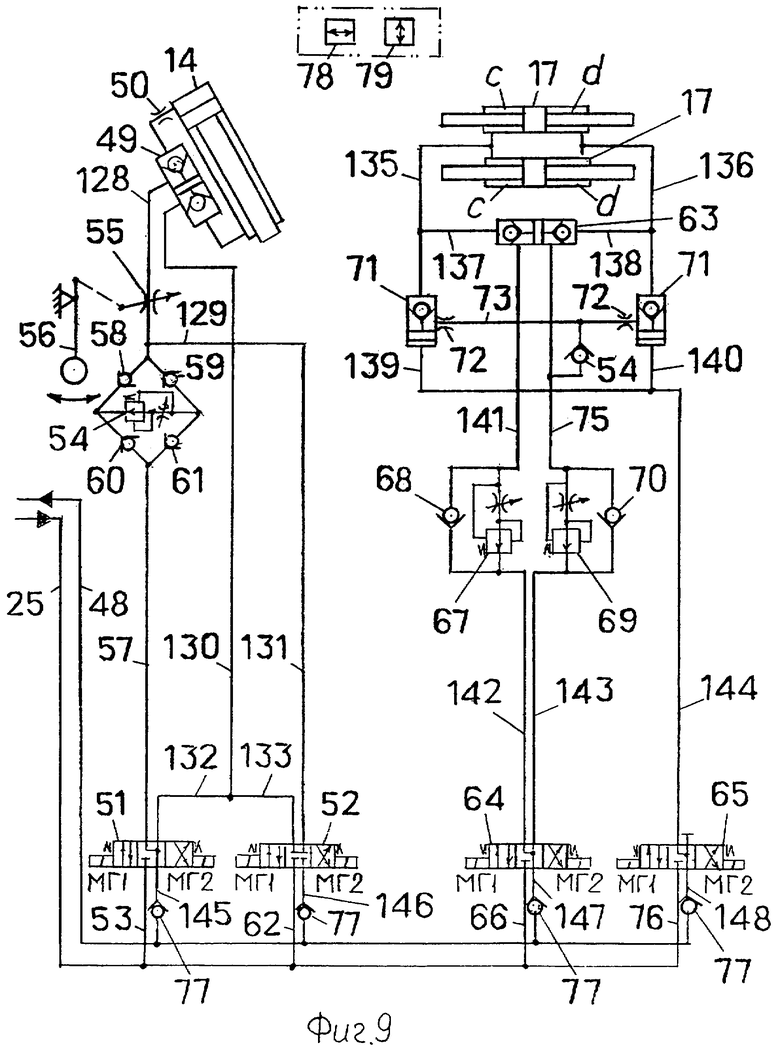
В варианте осуществления изобретения гидравлический привод используется в мобильной антенной установке с подъемной мачтой. Мобильная АУ содержит смонтированное на транспортном средстве 1 основание 2, на котором поворотно закреплена снабженная двумя параллельно установленными гидроцилиндрами 3 подъема подъемная мачта 4 с антенной 5. В варианте осуществления изобретения антенна 5 выполнена в виде модуля, включающего опорно-поворотное устройство (ОПУ) антенны и собственно антенну. На шасси транспортного средства установлены гидродомкраты 6-9 и насосный агрегат 10 с баком 11. Подъемная мачта включает рычаги с взаимным шарнирным сочленением, образующие верхнюю «а» и нижнюю «b» секции подъемной мачты с возможностью входа верхней секции в нижнюю при складывании подъемной мачты 4. Каждый из гидроцилиндров 3 подъема шарнирно соединен соответственно с основанием 2 и нижней секцией «b» подъемной мачты. На верхней секции «а» подъемной мачты 4 закреплена опорная платформа 12. Опорная платформа закреплена шарнирно с возможностью поворота относительно оси 13, расположенной перпендикулярно плоскости поворота подъемной мачты. Гидравлический привод снабжен гидроцилиндром 14 поворота опорной платформы 12. Гидроцилиндр 14 - двухстороннего действия. В другом варианте выполнения (на чертеже не показано) гидравлический привод может иметь, например, два параллельно установленных гидроцилиндра поворота опорной платформы. Гидроцилиндр 14 поворота шарнирно соединен соответственно с опорной платформой 12 и верхней секцией «а» подъемной мачты 4. На опорной платформе с возможностью поворота относительно оси 15, скрещивающейся под прямым углом с осью 13 поворота опорной платформы 12, шарнирно закреплена промежуточная платформа 16, на которой смонтировано ОПУ антенны 5. В варианте осуществления изобретения поворот промежуточной платформы 16 относительно опорной платформы 12 осуществляется посредством двух двухштоковых гидроцилиндров 17. Гидроцилиндры 17 выполнены каждый с двумя штоками одинакового диаметра и в исходном («нулевом») положении каждого гидроцилиндра его поршень образует две полости «с» и «d» равного объема. Одноименные полости двухштоковых гидроцилиндров 17 сообщены между собой. Корпус 18 каждого двухштокового гидроцилиндра 17 закреплен на опорной платформе 12, один шток 19 шарнирно закреплен на промежуточной платформе 16, а другой шток 20 соединен с нуль-установителем 21 двухстороннего действия, который смонтирован на корпусе 18. В варианте осуществления изобретения нуль-установитель выполнен, например, пружинным.
Каждый из гидродомкратов 6-9 снабжен односторонним гидрозамком 22 и гидравлически связан с насосным агрегатом 10 через два трехпозиционных гидрораспределителя 23, 24 с электромагнитным управлением (МГ1, МГ2). Гидродомкраты 6-9 с напорной и сливной магистралями гидросистемы сообщены одинаковым образом. В качестве трехпозиционных гидрораспределителей 23 могут быть использованы, например, гидрораспределители типа ГА163Т/16, ГА-163СТУ (со схемой распределения потока 34). В качестве трехпозиционных гидрораспределителей 24 могут быть использованы, например, гидрораспределители типа ВЕ10.44/Г24Н ГОСТ 24679-81 (со схемой распределения потока 44). Напорная магистраль 25, связывающая гидродомкрат с насосным агрегатом, имеет возможность сообщения с поршневой полостью гидродомкрата через трехпозиционный гидрораспределитель 23 в одной его позиции, блокировочный обратный клапан 26, регулятор расхода 27, обратный клапан 28 и гидрозамок 22. Регулятор расхода 27 настроен на небольшой расход и обеспечивает скоростной режим выдвижения штока соответствующего гидродомкрата при горизонтировании шасси транспортного средства. В качестве регуляторов расхода могут быть использованы, например, регуляторы расхода типа МПГ55-22М. При этом регулятор расхода 27 установлен в соответствующей магистрали с помощью блокировочных обратных клапанов 26, 28, 29, 30. Последние установлены с возможностью обеспечения неизменного направления движения жидкости через регулятор расхода 27 независимо от направления движения штока соответствующего гидродомкрата (т.е. выдвижения или втягивания). Кроме того, напорная магистраль 25 имеет возможность сообщения с поршневой полостью гидродомкрата через трехпозиционный гидрораспределитель 24 в одной его позиции, дроссель 31 и гидрозамок 22. Вместе с этим напорная магистраль 25 имеет возможность сообщения со штоковой полостью гидродомкрата соответственно через трехпозиционный гидрораспределитель 23 и трехпозиционный гидрораспределитель 24 в другой позиции каждого из этих гидрораспределителей. К магистрали 37, связывающей поршневую полость гидродомкрата соответственно с регулятором расхода 27 и дросселем 31, подключен сигнализатор 33 давления, который электрически связан с системой управления (на чертеже не показано). Трехпозиционные гидрораспределители 23, 24 и насосный агрегат 10 через систему управления электрически связаны с датчиками 34 и 35 соответственно продольного и поперечного горизонтирования, которые установлены на шасси транспортного средства 1. Для исключения влияния сливного давления на работу гидродомкратов 6-9 предусмотрены обратные клапаны 36. Скоростной режим при втягивании штоков упомянутых гидродомкратов обеспечивается соответствующими дросселями 31. Полости каждого гидродомкрата 6-9 посредством соответствующих магистралей 37-43 гидравлически связаны с соответствующими трехпозиционными гидрораспределителями 23, 24. Последние посредством соответствующих магистралей 44-47 соединены со сливной 48 и напорной 25 магистралями гидросистемы.
Гидроцилиндр 14 поворота опорной платформы 12 имеет двухсторонний гидрозамок 49 с дросселем 50 на входе в поршневую полость гидроцилиндра и гидравлически связан с насосным агрегатом 10 через трехпозиционные гидрораспределители 51, 52 с электромагнитным управлением. Напорная магистраль 25 через магистраль 53 имеет возможность сообщения с поршневой полостью гидроцилиндра поворота через трехпозиционный гидрораспределитель 51 с электромагнитным управлением в одной его позиции, регулятор расхода 54 и регулируемый дроссель 55, кинематически связанный с гравитационным маятником 56. Регулятор расхода 54 установлен в магистрали 57 с помощью блокировочных обратных клапанов 58-61. Последние установлены с возможностью обеспечения неизменного направления движения жидкости через регулятор расхода 54 независимо от направления движения штока гидроцилиндра 14 поворота. В качестве регулятора расхода 54 может быть использован, например, регулятор расхода типа МПГ55-22. Напорная магистраль 25 через магистраль 53 имеет возможность сообщения со штоковой полостью гидроцилиндра 14 поворота в другой позиции трехпозиционного гидрораспределителя 51 с электромагнитным управлением. Вместе с этим напорная магистраль 25 через магистраль 62 имеет возможность сообщения с поршневой полостью гидроцилиндра 14 поворота через трехпозиционный гидрораспределитель 52 с электромагнитным управлением в одной его позиции и регулируемый дроссель 55, кинематически связанный с гравитационным маятником 56 и имеет возможность сообщения со штоковой полостью гидроцилиндра 14 поворота через трехпозиционный гидрораспределитель 52 с электромагнитным управлением в другой его позиции.
Разноименные полости «с» и «d» двухштоковых гидроцилиндров 17 поворота промежуточной платформы 16 сообщены между собой посредством двухстороннего гидрозамка 63 и гидравлически связаны с насосным агрегатом 10 через трехпозиционные гидрораспределители 64, 65 с электромагнитным управлением. При этом напорная магистраль 25 через магистраль 66 имеет возможность сообщения со штоковыми полостями «с» двухштоковых гидроцилиндров 17 через трехпозиционный гидрораспределитель 64 с электромагнитным управлением в одной его позиции и регулятор расхода 67 с обратным клапаном 68, а также возможность сообщения со штоковыми полостями «d» двухштоковых гидроцилиндров 17 через трехпозиционный гидрораспределитель 64 с электромагнитным управлением в другой его позиции и регулятор расхода 69 с обратным клапаном 70. В качестве регуляторов расхода 67, 69 могут быть использованы, например, регуляторы расхода типа МПГ55-32М. Одноименные полости двухштоковых гидроцилиндров 17 также соединены с соответствующими односторонними гидрозамками 71, которые соединены между собой посредством дросселей 72 через магистраль 73. Последняя посредством обратного клапана 74 соединена с магистралью 75 управления двухсторонним гидрозамком 63. Напорная магистраль 25 через магистраль 76 имеет возможность сообщения со штоковыми полостями «с» и «d» двухштоковых гидроцилиндров 17 через трехпозиционный гидрораспределитель 65 с электромагнитным управлением в одной его позиции и соответствующие односторонние гидрозамки 71. Для исключения влияния сливного давления на работу гидроцилиндров 14 и 17 предусмотрены обратные клапаны 77.
Трехпозиционные гидрораспределители 51, 52 и 64, 65 с электромагнитным управлением через систему управления (на чертеже не показано) электрически связаны с датчиками 78, 79 соответственно продольного и поперечного горизонтирования, которые установлены на промежуточной платформе 16.
Насосный агрегат 10 включает два предохранительных клапана 80, 81 разной настройки на давление срабатывания и два насоса 82, 83 разной производительности. В варианте осуществления изобретения в качестве насоса 82 используется насос, например, типа 310.3.12.0.3 ТУ 22-1.020-100-95 с производительностью 16 л/мин. В качестве насоса 83 используется насос, например, типа 310.3.56.0.3. ТУ 22-1.020-100-95 с производительностью 80 л/мин. Предохранительный клапан 80 настроен на давление срабатывания, например, 20 МПа, а предохранительный клапан 81 настроен на давление срабатывания, например, 15 МПа. Насосы 82 и 83 сообщены с общей напорной магистралью 84, связанной с гидроцилиндрами 3 подъема. Каждый насос имеет клапан 85 разгрузки, гидравлически управляемый соответствующим двухпозиционным гидрораспределителем 86 с электромагнитным управлением (МГ1, МГ2), подключенным к общей напорной магистрали 84. В качестве гидрораспределителя 86 с электромагнитным управлением может быть использован, например, гидрораспределитель типа ГА163Т/16, ГА-163 СТУ. К напорной магистрали 84 подключены предохранительный клапан 80 большей настройки на давление срабатывания и двухпозиционный гидрораспределитель 87 с электромагнитным управлением. В качестве двухпозиционного гидрораспределителя 87 с электромагнитным управлением может быть использован, например, двухпозиционный гидрораспределитель типа ГА-158, ГА158СТУ. Общая напорная магистраль 84 через двухпозиционный гидрораспределитель 87 с электромагнитным управлением в одной его позиции имеет возможность сообщения с напорной магистралью 25, сообщающей насосный агрегат 10 соответственно с гидродомкратами 6-9, гидроцилиндром 14 поворота опорной платформы платформы 12 и с двухштоковыми гидроцилиндрами 17, установленными между опорной 12 и промежуточной 16 платформами. К напорной магистрали 25, обслуживающей все исполнительные гидроцилиндры кроме гидроцилиндров 3 подъема подъемной мачты 4, подключен предохранительный клапан 81 меньшей настройки на давление срабатывания.
Насосный агрегат 10 содержит также обратные клапаны 88-90, напорные фильтры 91, 92, сливной фильтр 93, манометр 94 и бак 11. Гидроэлементы насосного агрегата соединены посредством магистралей 95-113.
Насосный агрегат 10 через трехпозиционный гидрораспределитель 114 с электромагнитным управлением (МП, МГ2) гидравлически связан со штоковыми и поршневыми полостями гидроцилиндров 3 подъема подъемной мачты 4. В качестве трехпозиционного гидрораспределителя с электромагнитным управлением может быть использован, например, трехпозиционный гидрораспределитель типа ГА-144, ГА-144СТУ. Между трехпозипионным гидрораспределителем 114 и каждым гидроцилиндром 3 подъема подключен односторонний гидрозамок 115. Скоростной режим опускания мачты 4 обеспечивается дросселями 116 и параллельно им установленными обратными клапанами 117. Для исключения влияния сливного давления на работу гидроцилиндров 3 подъема предусмотрен обратный клапан 118. Гидроцилиндры 3 подъема с трехпозиционным гидрораспределителем 114 сообщены посредством магистралей 119-126. Трехпозиционный гидрораспределитель 114 соединен также со сливной магистралью 127.
Гидросистема гидравлического привода включает также магистрали 128-148.
Гидравлический привод мобильной антенной установки с подъемной мачтой работает следующим образом.
На месте развертывания мобильной АУ вначале вручную переводят выносные поворачивающиеся опоры с гидродомкратами 6-9 из транспортировочного (походного) положения в рабочее положение. Затем по команде системы управления включают насос 82 насосного агрегата 10. Вначале насос 82 работает в режиме разгрузки, и весь расход идет по магистрали 96, через соответствующий клапан 85 разгрузки, по магистралям 103, 107, 113, через сливной фильтр 93 и обратный клапан 90 в бак 11. При этом давление на манометре 94 будет не более 1 МПа. Через 3-5 секунд после включения насоса 82 срабатывает реле времени (на чертеже не показано) и по команде системы управления включаются двухпозиционный гидрораспределитель 86 (МП), двухпозиционный гидрораспределитель 87, трехпозиционные гидрораспределители 23 (МП) и трехпозиционные гидрораспределители 24 (МП) (см. фиг.8). При этом упомянутый клапан 85 разгрузки через включенный двухпозиционный гидрораспределитель 86 (МГ1) запирается давлением жидкости из напорной магистрали и жидкость под давлением, определяемым нагрузкой на гидродомкраты, но не выше давления срабатывания предохранительного клапана 81 (например, 15 МПа), по магистрали 95, через обратный клапан 88, напорный фильтр 91, по магистралям 97, 98, 99, 101, 108, через включенный двухпозиционный гидрораспределитель 87, по магистралям 112, 25, 44 и 46 поступит к трехпозиционным гидрораспределителям 23, 24. Далее жидкость под давлением через включенные трехпозиционные гидрораспределители 24 по магистралям 41, через дроссели 31 и одновременно через включенные трехпозиционные гидрораспределители 23, по магистралям 39, через обратные клапаны 26, регуляторы расхода 27, через обратные клапаны 28, по магистралям 38 поступит в магистрали 37, откроет гидрозамки 22 и поступит в поршневые полости гидродомкратов 6-9. При этом штоки гидродомкратов начнут выдвигаться (т.е. - опускаться). Слив рабочей жидкости из штоковых полостей гидродомкратов 6-9 происходит по магистралям 40, 42, 43, через трехпозиционные гидрораспределители 23, 24, по магистралям 45, 47, через обратные клапаны 36, по магистралям 48, 113, через сливной фильтр 93, обратный клапан 90 в бак 11. В результате выдвижения штоков гидродомкратов шасси транспортного средства 1 начинает вывешиваться и его рессоры (на чертеже не показано) начинают разжиматься. Таким образом, весовая нагрузка от мобильной АУ в целом передается на гидродомкраты 6-9, вследствие чего давление в гидросистеме возрастает. Когда давление в гидросистеме достигает величины срабатывания сигнализаторов давления 33 (например, ˜ 5 МПа) по сигналу системы управления происходит отключение трехпозиционных гидрораспределителей 24. Таким образом, благодаря тому, что весь расход насоса 82 через восемь включенных гидрораспределителей поступает в поршневые полости гидродомкратов 6-9, процесс вывешивания шасси транспортного средства 1 (а по существу - мобильной АУ в целом) происходит достаточно быстро.
После вывешивания шасси транспортного средства 1 последнее со смонтированным на нем основанием 2 с подъемной мачтой 4 с антенной 5 горизонтируют в продольной и поперечной плоскостях транспортного средства. По сигналу датчика 34 продольного горизонтирования и команде системы управления в зависимости от наклона шасси транспортного средства в продольной плоскости в сторону передних 6, 8 (по чертежу) или задних 7, 9 гидродомкратов остаются включенными трехпозиционные гидрораспределители 23, связанные с гидродомкратами 6, 8 или 7, 9. При этом жидкость в поршневые полости гидродомкратов 6, 8 или 7, 9 будет поступать так же, как и при вывешивании шасси транспортного средства 1, но только через включенные два трехпозиционных гидрораспределителя 23 и, соответственно, через два регулятора расхода 27. Благодаря тому что регуляторы расхода 27 настроены на небольшой расход, горизонтирование шасси будет проходить намного медленнее, чем вывешивание. Ограничение скорости горизонтирования необходимо для обеспечения заданной точности выставки шасси при его горизонтировании в продольной плоскости (т.е. ˜ для того, чтобы «не проскочить» зону допустимого угла наклона шасси при горизонтировании в продольной плоскости транспортного средства). Избыточный расход насоса 82 будет идти через включенный двухпозиционный гидрораспределитель 87, по магистрали 110, через предохранительный клапан 81, по магистрали 134, через сливной фильтр 93 и обратный клапан 90 в бак 11.
После горизонтирования в продольной плоскости транспортного средства по сигналу датчика 35 поперечного горизонтирования и команде системы управления включают трехпозиционные гидрораспределители 23, связанные с гидродомкратами 6, 7 или с гидродомкратами 8, 9 в зависимости от направления крена шасси транспортного средства (на правый или на левый борт, т.е. по чертежу - в сторону гидродомратов 6, 7 или гидродомкратов 8, 9), и производят поперечное горизонтирование шасси транспортного средства 1. Так же как и продольное горизонтирование шасси, поперечное горизонтирование шасси, благодаря заданной настройке регуляторов расхода 27, происходит намного медленнее, чем вывешивание шасси. Ограничение скорости горизонтирования необходимо для обеспечения заданной точности выставки шасси при его горизонтировании в поперечной плоскости (т.е. для того, чтобы «не проскочить» зону допустимого угла крена шасси).
Вывешивание и горизонтирование шасси транспортного средства 1 осуществляется посредством системы управления в автоматическом режиме по команде оператора с пульта в кабине транспортного средства или с помощью выносного пульта. После окончания процесса поперечного горизонтирования шасси по сигналу датчика 35 поперечного горизонтирования и команде системы управления отключают все гидрораспределители.
Затем в автоматическом режиме посредством системы управления осуществляют подъем подъемной мачты 4. Для подъема мачты 4 рабочая жидкость подается в гидроцилиндры 3 подъема. Для быстрого подъема мачты 4 с антенной 5 включаются оба насоса 82, 83, которые вначале работают в режиме разгрузки, и расход насосов через клапаны 85 разгрузки, по магистралям 96, 103, 105, 107, 113, через сливной фильтр 93 и обратный клапан 90 поступает в бак 11. При этом давление на манометре 94 будет не более 1 МПа. Через 3-5 секунд после включения насосов 82, 83 срабатывает реле времени (на чертеже не показано) и по команде системы управления включаются двухпозиционные гидрораспределители 86 (МП и МГ2) и 114 (МГ1). При этом клапаны 85 разгрузки через включенный двухпозиционный гидрораспределитель 86 запираются давлением жидкости из напорной магистрали. Давление жидкости в общей напорной магистрали 84 повышается до величины, определяемой нагрузкой на гидроцилиндры 3 подъема, но не выше давления срабатывания предохранительного клапана 80 (например, 20 МПа). Рабочая жидкость от двух насосов 82, 83 с суммарной производительностью, например, 96 л/мин через обратные клапаны 88, 89, напорные фильтры 91, 92, по магистралям 97-99, 101, 84, через включенный трехпозиционный гидрораспределитель 114, по магистралям 119 поступает соответственно в магистрали 120,121. Далее рабочая жидкость давлением открывает односторонние гидрозамки 115 и по магистралям 125, 126, через обратные клапаны 117 с параллельно им установленными дросселями 116 поступает в поршневые полости гидроцилиндров 3 подъема. Происходит подъем мачты 4. При подъеме мачты происходит поворот в вертикальной плоскости ее нижней секции «b», которая кинематически связана с верхней секцией «а», что позволяет поднять верхнюю секцию «а» с опорной платформой 12 на заданную системой управления высоту, при достижении которой подъем мачты 4 прекращается. Судить о высоте подъема мачты позволяет датчик (на чертеже не показано) угла поворота нижней секции подъемной мачты, который вырабатывает сигнал, соответствующий высоте подъема антенны. Слив рабочей жидкости из штоковых полостей гидроцилиндров 3 подъема происходит по магистралям 123, 124, 122, через включенный трехпозиционный гидрораспределитель 114, по магистрали 127, через обратный клапан 118, по магистралям 48 и 113, через сливной фильтр 93 и обратный клапан 90 в бак 11. После подъема мачты 4 на заданную высоту система управления отключает все гидрораспределители.
После этого посредством исполнительного гидроцилиндра 14 осуществляют разворот опорной платформы 12 совместно с установленными на ней промежуточной платформой 16 и ОПУ с антенной. После чего, также в автоматическом режиме, осуществляют горизонтирование промежуточной платформы 16. Горизонтирование осуществляют с помощью исполнительных гидроцилиндров 14 и 17 посредством поворота опорной платформы 12 относительно горизонтальной оси 13 и поворота промежуточной платформы 16 относительно горизонтальной оси 15. При этом сначала посредством исполнительного гидроцилиндра 14 двухстороннего действия и установленного на промежуточной платформе 16 датчика 78 продольного горизонтирования промежуточной платформы 16 последнюю выставляют относительно горизонтальной оси 13 (т.е. - в плоскости поворота подъемной мачты 4). После чего посредством исполнительных двухштоковых гидроцилиндров 17 и установленного на промежуточной платформе 16 датчика 79 поперечного горизонтирования промежуточной платформы последнюю выставляют относительно горизонтальной оси 15. Поворот относительно оси 15 производят в зависимости от направления крена вертикальной оси ОПУ с антенной.
Разворот опорной платформы 12 и горизонтирование промежуточной платформы осуществляются от одного насоса 82 малой производительности. По команде системы управления включают насос 82. После режима разгрузки, через 3-5 секунд после включения насоса, включаются двухпозиционные гидрораспределители 86, 87 и трехпозиционные гидрораспределители 51 (МГ1), 52 (МГ2). Рабочая жидкость от насоса 82 по магистрали 95, через обратный клапан 88, напорный фильтр 91, по магистралям 97-99, 101, 108, через включенный двухпозиционный гидрораспределитель 87, по магистралям 112, 25 и 53, 62, через включенные трехпозиционные гидрораспределители 51, 52, и далее с одной стороны по магистрали 131, а с другой стороны по магистрали 57, через обратный клапан 61, регулятор расхода 54, обратный клапан 58 поступает в магистраль 129, через регулируемый дроссель 55 поступает в магистраль 128, открывает двухсторонний гидрозамок 49 и через дроссель 50 поступает в поршневую полость гидроцилиндра 14 поворота опорной платформы 12. Происходит поворот опорной платформы 12 относительно горизонтальной оси 13 и, соответственно, относительно верхней секции «а» подъемной мачты 4. Вначале угловая скорость поворота опорной платформы 12 будет достаточно большой, т.к. весь расход насоса 82 через два включенных трехпозиционных гидрораспределителя 51, 52 будет поступать в гидроцилиндр 14 поворота. Когда до перехода опорной платформы 12 в горизонтальное положение остается ˜3°, по сигналу датчика 78 продольного горизонтирования и команде системы управления трехпозиционный гидрораспределитель 52 отключают. В результате этого рабочая жидкость в гидроцилиндр 14 поворота будет поступать только через трехпозиционный гидрораспределитель 51, регулятор расхода 54, настроенный на малый расход, и через регулируемый дроссель 55, проходное сечение которого будет уменьшено под воздействием кинематически связанного с дросселем гравитационного маятника 56, низменно сохраняющего свое вертикальное положение при повороте опорной платформы в вертикальной плоскости. Таким образом, угловая скорость поворота опорной платформы значительно уменьшается, благодаря чему обеспечивается необходимая точность горизонтирования опорной платформы 12 в продольной плоскости. Избыточное количество рабочей жидкости, подаваемой насосом 82, пройдет через предохранительный клапан 81, по магистрали 113, через сливной фильтр 93, обратный клапан 90 в бак 11. Жидкость из штоковой полости гидроцилиндра 14 вытесняется через открытый двухсторонний гидрозамок 49 по магистралям 130, 132, 133, через трехпозиционные гидрораспределители 51, 52, по магистралям 48, 113, через сливной фильтр 93, обратный клапан 90 в бак 11. После окончания процесса горизонтирования опорной платформы 12 по сигналу датчика 78 продольного горизонтирования трехпозиционный гидрораспределитель 51 отключают.
Затем по сигналу датчика 79 поперечного горизонтирования и команде системы управления включают трехпозиционный гидрораспределитель 64 (МГ1 или МГ2 в зависимости от направления крена промежуточной платформы 16 вправо или влево). Рабочая жидкость от насоса 82 по магистрали 95, через обратный клапан 88, фильтр 91, по магистралям 97, 98, 99, 101, 108, через включенный двухопозиционный гидрораспределитель 87, по магистралям 109, 112, 25, 66, через включенный трехпозиционный гидрораспределитель 64, по магистрали, например, 142 (или 143 в зависимости от направления крена промежуточной платформы 16), через обратный клапан 68 (70) поступает в магистраль 141 (75) и открывает двухсторонний гидрозамок 63. Далее по магистралям 137, 135 (63, 136) рабочая жидкость поступает в одноименные полости «с» («d») двухштоковых гидроцилиндров 17 поворота промежуточной платформы 16. Происходит поворот промежуточной платформы 16 совместно с ОПУ антенны 5 относительно горизонтальной оси 15. Одновременно при перемещении штоков 19 двухштоковых гидроцилиндров 17 сжимаются пружины нуль-установителя 21. Рабочая жидкость, вытесняемая из одноименных полостей, например, «d» (в рассматриваемом примере) двухштоковых гидроцилиндров 17, поступает по магистрали 136 (135), 138 (137), через открытый двухсторонний гидрозамок 63, по магистрали 75 (141), через регулятор расхода 69 (67), настроенный на малый расход, по магистрали 143 (142), через трехпозиционный гидрораспределитель 64, по магистрали 147, через обратный клапан 77, по магистралям 48 и 113, через сливной фильтр 93 и обратный клапан 90 в бак 11. После окончания процесса поперечного горизонтирования промежуточной платформы 16 по сигналу датчика 79 поперечного горизонтирования отключают все гидрораспределители. При этом положение штоков каждого двухштокового гидроцилиндра 17 относительно корпуса 18 гидроцилиндра (по существу - положение гидроцилиндров) фиксируется посредством двухстороннего гидрозамка 63. Пружины нуль - установителей 21 остаются сжатыми.
В период «дежурства» мобильной АУ, при необходимости, по сигналам датчиков 78, 79 продольного и поперечного горизонтирования и команде системы управления аналогичным образом автоматически осуществляется подгоризонтирование промежуточной платформы 16. Таким образом, при работе АУ автоматически поддерживается горизонтальное положение промежуточной платформы 16 с антенным модулем (по существу, обеспечивается вертикальность азимутальной оси наведения антенны), что, в конечном счете, обеспечивает повышение точности наведения АУ.
Удержание подъемной мачты 4 в поднятом (рабочем) положении обеспечивается односторонними гидрозамками 115, сообщенными соответственно с поршневыми полостями гидроцилиндров 3 подъема. В варианте осуществления изобретения опорная платформа 12 в рабочем положении АУ по высоте может быть установлена на одном из, например, пяти заданных уровней. В период «дежурства» АУ перевод подъемной мачты 4 на другую высотную отметку (другой высотный уровень) производится по команде системы управления.
При переводе АУ из рабочего положения в транспортировочное (походное) вначале промежуточную платформу 16 с антенным модулем переводят в положение, которое при складывании подъемной мачты 4 исключает возможность соударений элементов АУ, когда верхняя секция «а» подъемной мачты входит в ее нижнюю секцию «b». Для этого включают насос 82. После режима разгрузки, через 3-5 секунд после включения насоса включаются двухпозиционные гидрораспределители 86 (МП), 87 и 65 (МГ1). Рабочая жидкость от насоса 82 по магистрали 95, через обратный клапан 88, напорный фильтр 91, по магистралям 97-99, 101, 108, через включенный двухпозиционный гидрораспределитель 87, по магистралям 109, 112, 25 и 76 через включенный гидрораспределитель 65, по магистралям 144, 139 и 140 поступит в полости управления соответствующих односторонних гидрозамков 71 и откроет последние. При этом полости «с» и «d» двухштоковых гидроцилиндров 17 сообщаются между собой. В результате под действием пружин нуль-установителей 21 штоки двухштоковых гидроцилиндров 17 перемещаются в исходное среднее положение, а рабочая жидкость из одних штоковых полостей перетекает в другие по магистралям 135, 136, через открытые односторонние гидрозамки 71, через дроссели 72, по магистрали 73. Избыток жидкости, образующийся при открывании односторонних гидрозамков 71, по магистрали 73, через обратный клапан 74, по магистрали 75, через регулятор расхода 69, по магистрали 143, через гидрораспределитель 64, по магистрали 147, через обратный клапан 77 поступит в сливную магистраль 48 и далее через сливной фильтр 93 и обратный клапан 90 поступит в бак 11. По существу, посредством нуль - установителей происходит центрирование промежуточной платформы 16 с установленным на ней ОПУ с антенной относительно продольной плоскости симметрии подъемной мачты 4.
Дальнейшее свертывание АУ в транспортировочное положение производят в обратной последовательности в сравнении с развертыванием АУ. При этом вместо электромагнитов МП гидрораспределителей гидравлического привода включают электромагниты МГ2.
Таким образом, благодаря особенности исполнения гидравлического привода мобильной АУ с подъемной мачтой изобретение позволяет осуществить в автоматическом режиме быстрое вывешивание и горизонтирование шасси транспортного средства (а по существу - мобильной АУ в целом), быстрый подъем антенного модуля на заданную высоту, обеспечить вертикальность азимутальной оси наведения антенны путем горизонтирования промежуточной платформы, несущей ОПУ антенны, и при необходимости автоматически осуществлять подгоризонтярование промежуточной платформы в период «дежурства» АУ, что, в конечном счете, обеспечивает повышение точности наведения АУ. При этом изобретение позволяет осуществлять в автоматическом режиме быстрое развертывание-свертывание мобильной АУ с подъемной мачтой при передислокации. Вместе с этим благодаря использованию в насосном агрегате гидравлического привода двух насосов разной производительности изобретение позволяет снизить энергопотребление гидравлического привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНЫМ ЭЛЕМЕНТОМ | 2014 |
|
RU2570679C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО КАНТОВАТЕЛЯ С ПОВОРОТНОЙ ПОДЪЕМНОЙ ПЛАТФОРМОЙ | 2008 |
|
RU2356829C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЛЮКОВОГО ЗАКРЫТИЯ | 2008 |
|
RU2364542C1 |
| Пневмогидравлическая антенная система и способ управления ее геометрическими и электрическими параметрами | 2024 |
|
RU2840226C1 |
| МОБИЛЬНАЯ ПУСКОВАЯ УСТАНОВКА | 2015 |
|
RU2620007C2 |
| Гидросистема специального оборудования транспортно-заряжающей машины на колесном шасси | 2021 |
|
RU2787601C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНО-ПУСКОВЫМ КОНТЕЙНЕРОМ МИННОГО ЗАГРАДИТЕЛЯ | 2010 |
|
RU2442944C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |



Изобретение относится к подъемной технике, в частности гидравлическому приводу (ГП) для подъема мачты антенной установки. ГП содержит систему управления (СУ), установленные на шасси транспортного средства (ТС) гидродомкраты (ГД) и насосный агрегат (НА) с баком. ГП содержит трехпозиционные гидрораспределители (ТГ). При этом каждый ГД гидравлически связан с НА через соответствующие первый и второй ТГ. Напорная магистраль (М), связывающая НА с ГД, имеет возможность сообщения с поршневой полостью ГД через первый ТГ в одной его позиции и первый регулятор расхода (РР). Первый РР установлен в соответствующей М с помощью четырех блокировочных обратных клапанов (ОК). Последние установлены с возможностью обеспечения неизменного направления движения жидкости через первый РР независимо от направления движения штока ГД. Напорная М, связывающая НА с ГД, имеет возможность сообщения с поршневой полостью ГД также через второй ТГ в одной его позиции и дроссель. При этом упомянутая напорная М имеет возможность сообщения со штоковой полостью ГД соответственно через первый и второй ТГ в другой позиции каждого из них. К магистрали, сообщающей поршневую полость ГД соответственно с первым РР и дросселем, подключен дополнительно введенный сигнализатор давления, который электрически связан с СУ. Первый и второй ТГ и НА через СУ электрически связаны с датчиками горизонтирования, которые установлены на шасси ТС. ГП снабжен по меньшей мере одним гидроцилиндром (ГЦ) поворота поворота опорной платформы (ОП), который шарнирно соединен соответственно с ОП и верхней секцией ПМ. ГЦ поворота имеет двухсторонний гидрозамок (ГЗ) и связан с НА через третий и четвертый ТГ. Напорная М, связывающая НА с ГЦ поворота, имеет возможность сообщения с поршневой полостью ГЦ поворота через третий ТГ в одной его позиции, второй РР и регулируемый дроссель, кинематически связанный с гравитационным маятником. Второй РР установлен в соответствующей М с помощью четырех других блокировочных ОК. Последние установлены с возможностью обеспечения неизменного направления движения жидкости через второй РР независимо от направления движения штока ГЦ поворота. Напорная М, связывающая НА с ГЦ поворота, имеет возможность сообщения со штоковой полостью ГЦ поворота в другой позиции третьего ТГ, а также имеет возможность сообщения с поршневой полостью ГЦ поворота через четвертый ТГ в одной его позиции и упомянутый регулируемый дроссель, и имеет возможность сообщения со штоковой полостью ГЦ поворота через четвертый ТГ в другой его позиции. ГП снабжен по меньшей мере одним двухштоковым гидроцилиндром. Корпус последнего шарнирно закреплен на ОН, один шток шарнирно закреплен на промежуточной платформе, которая шарнирно закреплена на ОП с возможностью поворота относительно оси, скрещивающейся под прямым углом с осью поворота ОН, а другой шток соединен с нуль-установителем двухстороннего действия, который смонтирован на корпусе двухштокового гидроцилиндра. Изобретение расширяет функциональные возможности гидравлического привода мобильной антенной установки с подъемной мачтой, позволяет осуществлять в автоматическом режиме быстрое развертывание-свертывание антенной установки при передислокации и обеспечивает повышение точности ее наведения. 2 з.п. ф-лы, 10 ил.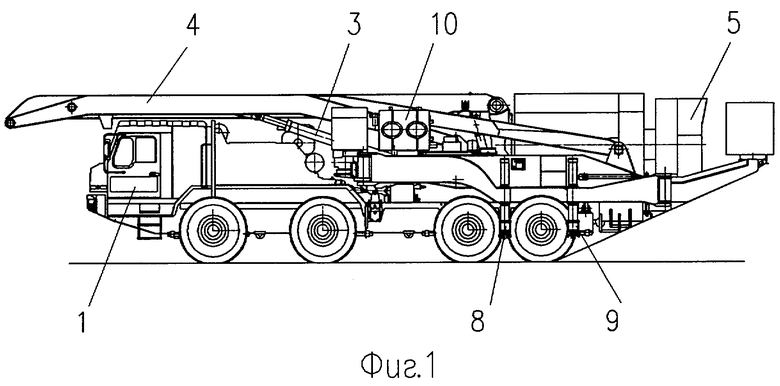
| Гидравлический привод подъемника | 1984 |
|
SU1201216A1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 1997 |
|
RU2115977C1 |
| US 3842933 A, 22.10.1974. | |||

