ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к технической области гидравлических давлений и, в частности, к способу гидравлического управления опусканием, системе гидравлического управления опусканием и инженерной технике.
УРОВЕНЬ ТЕХНИКИ
Для управления опусканием стрелы в инженерной технике используют рукоятку гидравлического управления и гидравлический балансировочный клапан с переменной амплитудой, а величина открытия балансировочного клапана регулируется маслом контура управления, подаваемым с помощью рукоятки управления. Скорость опускания стрелы напрямую зависит от скорости перемещения цилиндра изменения вылета стрелы, при этом стрела поддерживается цилиндром изменения выноса стрелы, действуя всем своим весом на цилиндр изменения выноса стрелы, а для опускания стрелы обычно используют способ опускания под собственной тяжестью, причем скорость опускания невозможно выбрать. В реальном рабочем процессе оператор управляет скоростью опускания стрелы, манипулируя рукояткой управления, причем регулировка скорости опускания является сложным испытанием для профессиональных навыков оператора, а неправильные действия легко приведут к проблемам, таким как невозможность опускания или слишком быстрое опускание стрелы.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В настоящем изобретении предложены способ гидравлического управления опусканием, система гидравлического управления опусканием и инженерная техника, которые предназначены для преодоления недостатка, заключающегося в том, что в известном уровне техники скорость опускания стрелы одинаковая и трудно подается регулированию.
В настоящем изобретении предложен способ гидравлического управления опусканием, включающий: получение значения давления в бесштоковой полости цилиндра изменения выноса стрелы; когда значение давления больше или равно заданному значению давления, установление первого режима управления для входного тока электрического пропорционального управляющего клапана, причем первый режим управления включает множество первых подрежимов управления; и на основе скорости опускания стрелы, которая выбирается пользователем, выбор управляющего тока соответствующего первого подрежима управления в качестве входного тока электрического пропорционального управляющего клапана.
Согласно способу гидравлического управления опусканием, предложенному в настоящем изобретении, в первом режиме управления входной ток электрического пропорционального управляющего клапана получают в соответствии с коэффициентом компенсации, перепадом давления бесштоковой полости цилиндра изменения выноса стрелы и пусковым током электрического пропорционального управляющего клапана.
Согласно способу гидравлического управления опусканием, предложенному в настоящем изобретении, когда вычисленный управляющий ток больше или равен минимальному току для опускания стрелы, управляющий ток берут в качестве входного тока электрического пропорционального управляющего клапана, причем управляющий ток вычисляют по формуле:
Ix = -K × ΔP + B
где Ix - управляющий ток, K - коэффициент компенсации, ΔP- перепад давления бесштоковой полости цилиндра изменения выноса стрелы в процессе опускания, а B - пусковой ток электрического пропорционального управляющего клапана.
Согласно способу гидравлического управления опусканием, предложенному в настоящем изобретении, способ гидравлического управления опускание дополнительно включает: когда вычисленный управляющий ток меньше минимального тока для опускания стрелы, в качестве входного тока электрического пропорционального управляющего клапана берут минимальный ток.
Согласно способу гидравлического управления опусканием, предложенному в настоящем изобретении, способ гидравлического управления опускание дополнительно включает: когда значение давления меньше заданного значения давления, для входного тока электрического пропорционального управляющего клапана устанавливают второй режим управления, причем во втором режиме управления пусковой ток подают на вход электрического пропорционального управляющего клапана в качестве максимального управляющего тока.
В настоящем изобретении также предложена система гидравлического управления опусканием, содержащая: пилотный клапан, соединенный с источником масла со стабилизируемым давлением; первый переключающий клапан, причем первый управляющий конец первого переключающего клапана соединен с пилотным клапаном посредством первого масляного канала, на первом масляном канале расположен электрический пропорциональный управляющий клапан, с отверстием для рабочего масла первого переключающего клапана соединен балансировочный клапан, возвратное отверстие первого переключающего клапана соединено с первым масляным баком, а электрический пропорциональный управляющий клапан выполнен с возможностью управления степенью открытия золотника балансировочного клапана; цилиндр изменения выноса стрелы, причем бесштоковая полость цилиндра изменения выноса стрелы соединена с балансировочным клапаном, а штоковая полость цилиндра изменения выноса стрелы соединена со вторым масляным баком; в бесштоковой полости цилиндра изменения выноса стрелы расположен датчик давления; и контроллер, причем контроллер выполнен с возможностью управления входным током электрического пропорционального управляющего клапана в соответствии со значением давления, определяемым датчиком давления, и скоростью опускания стрелы, которая выбирается пользователем.
Система гидравлического управления опусканием, предложенная в настоящем изобретении, дополнительно содержит: электромагнитный клапан, причем электромагнитный клапан расположен на втором масляном канале, который соединяет второй управляющий конец первого переключающего клапана с пилотным клапаном, и электромагнитный клапан выполнен с возможностью управления соединением и отсоединением второго масляного канала.
Согласно системе гидравлического управления опусканием, предложенной в настоящем изобретении, электромагнитный клапан содержит двухпозиционный трехходовой электромагнитный клапан.
Согласно системе гидравлического управления опусканием, предложенной в настоящем изобретении, балансировочный клапан содержит: второй переключающий клапан, причем второй переключающий клапан соединен с отверстием для рабочего масла первого переключающего клапана, и второй переключающий клапан имеет различные рабочие положения для достижения подачи масла в бесштоковую полость цилиндра изменения выноса стрелы или возврата масла из нее; и первый обратный клапан, причем первый обратный клапан соединен параллельно со вторым переключающим клапаном.
Согласно системе гидравлического управления опусканием, предложенной в настоящем изобретении, второй переключающий клапан содержит: второй обратный клапан, причем, когда второй обратный клапан переключен в первое рабочее положение, масловпускное отверстие второго обратного клапана соединено с отверстием для рабочего масла первого переключающего клапана, а масловыпускное отверстие второго обратного клапана соединено с бесштоковой полостью цилиндра изменения выноса стрелы; и дроссельный клапан, причем когда второй переключающий клапан переключен во второе рабочее положение, масловпускное отверстие дроссельного клапана соединено с бесштоковой полостью цилиндра изменения выноса стрелы, масловыпускное отверстие дроссельного клапана соединено с отверстием для рабочего масла первого переключающего клапана, а электрический пропорциональный управляющий клапан выполнен с возможностью управления степенью открытия золотника дроссельного клапана.
Система гидравлического управления опусканием, предложенная в настоящем изобретении, дополнительно содержит: клапан компенсации давления, соединенный с первым переключающим клапаном.
Согласно системе гидравлического управления опусканием, предложенной в настоящем изобретении, электрический пропорциональный управляющий клапан выполнен в виде электрического пропорционального редукционного клапана давления или электрического пропорционального перепускного клапана.
Согласно системе гидравлического управления опусканием, предложенной в настоящем изобретении, первый переключающий клапан выполнен в виде трехпозиционного шестиходового переключающего клапана с гидравлическим управлением.
В настоящем изобретении также предложена инженерная техника, содержащая систему гидравлического управления опусканием, описанную выше.
В число инженерной техники, предложенной в настоящем изобретении, входят автомобильная насосная установка, грузовой автомобиль с выдвижной лестницей или кран.
Согласно способу гидравлического управления опусканием, предложенному в настоящем изобретении, путем установки первых подрежимов управления в соответствии со скоростями опускания стрелы могут быть выбраны различные первые подрежимы управления в соответствии с потребностями пользователя, и, таким образом, входной ток электрического пропорционального управляющего клапана может быть отрегулирован таким образом, чтобы скорость опускания стрелы могла регулироваться автоматически, и, следовательно, стрела опускалась с разными скоростями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более ясного описания технических решений настоящего изобретения или в известном уровне техники далее в настоящем документе будут кратко описаны чертежи, на которые делаются ссылки при описании вариантов осуществления или известного уровня техники. Очевидно, что описываемые далее в настоящем документе чертежи иллюстрируют некоторые варианты осуществления настоящего изобретения, и специалист в данной области может на основе чертежей, описанных в настоящем документе, получить также другие чертежи без творческих усилий.
На ФИГ. 1 приведена схема последовательности операций способа гидравлического управления опусканием, предложенного в настоящем изобретении.
На ФИГ. 2 приведена схема логического решения способа гидравлического управления опусканием, предложенного в настоящем изобретении.
На ФИГ. 3 приведена принципиальная схема системы гидравлического управления опусканием, предложенной в настоящем изобретении.
На ФИГ. 4 приведен увеличенный вид балансировочного клапана, изображенного на ФИГ. 3.
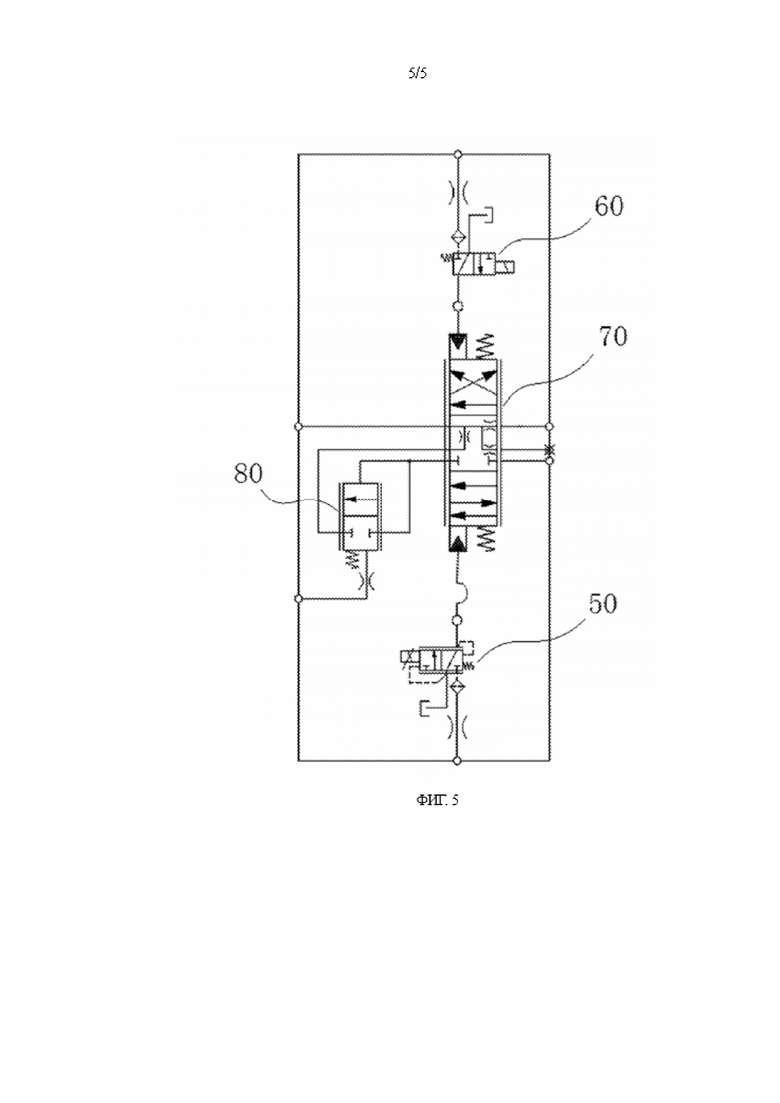
На ФИГ. 5 приведен увеличенный вид электромагнитного клапана, первого переключающего клапана и электрического пропорционального управляющего клапана, изображенных на ФИГ. 3.
Номера позиций:
10 - пилотный клапан; 20 - балансировочный клапан; 21 - второй обратный клапан; 22 - дроссельный клапан; 23 - первый обратный клапан; 30 - цилиндр изменения выноса стрелы; 40 - датчик давления; 50 - электрический пропорциональный управляющий клапан; 60 - электромагнитный клапан; 70 - первый переключающий клапан; 80 - клапан компенсации давления; 100 - второй масляный бак; 101 - первый масляный канал и 102 - второй масляный канал.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Для того чтобы цели, технические решения и преимущества настоящего изобретения стали более понятными, ниже будут ясно и полно описаны технические решения настоящего изобретения со ссылкой на чертежи, прилагаемые к настоящей заявке. Очевидно, что описанные варианты осуществления являются частью вариантов осуществления настоящего изобретения, а не всеми вариантами осуществления. Все другие варианты осуществления, полученные специалистами в данной области на основе этих вариантов осуществления настоящего изобретения без творческих усилий, попадают в объем охраны настоящего изобретения.
Таким образом, признак, определенный терминами «первый» или «второй» в описании изобретения и формуле изобретения в настоящем изобретении, может явно или неявно включать один или несколько из этих признаков. В описании настоящего изобретения «множество» означает два или более, если не указано иное.
Ниже со ссылкой на прилагаемые чертежи описаны способ гидравлического управления опусканием, система гидравлического управления опусканием и инженерная техника согласно настоящему изобретению.
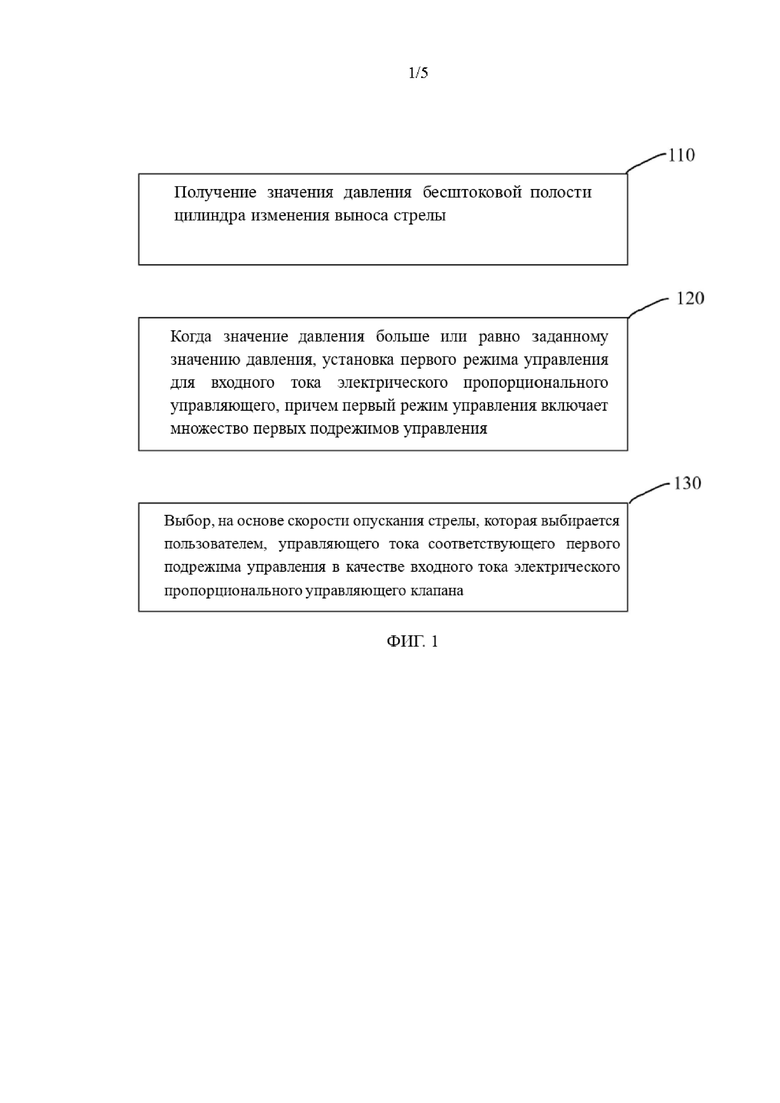
На ФИГ. 1 приведена схема последовательности операций способа гидравлического управления опусканием, предложенного в настоящем изобретении. На ФИГ. 2 приведена схема логического решения способа гидравлического управления опусканием, предложенного в настоящем изобретении. Способ гидравлического управления опусканием описан ниже со ссылкой на ФИГ. 1 и ФИГ. 2. Как показано на ФИГ. 1, способ гидравлического управления опусканием, в частности, включает следующие этапы:
Этап 110: получают значение давления бесштоковой полости цилиндра изменения выноса стрелы.
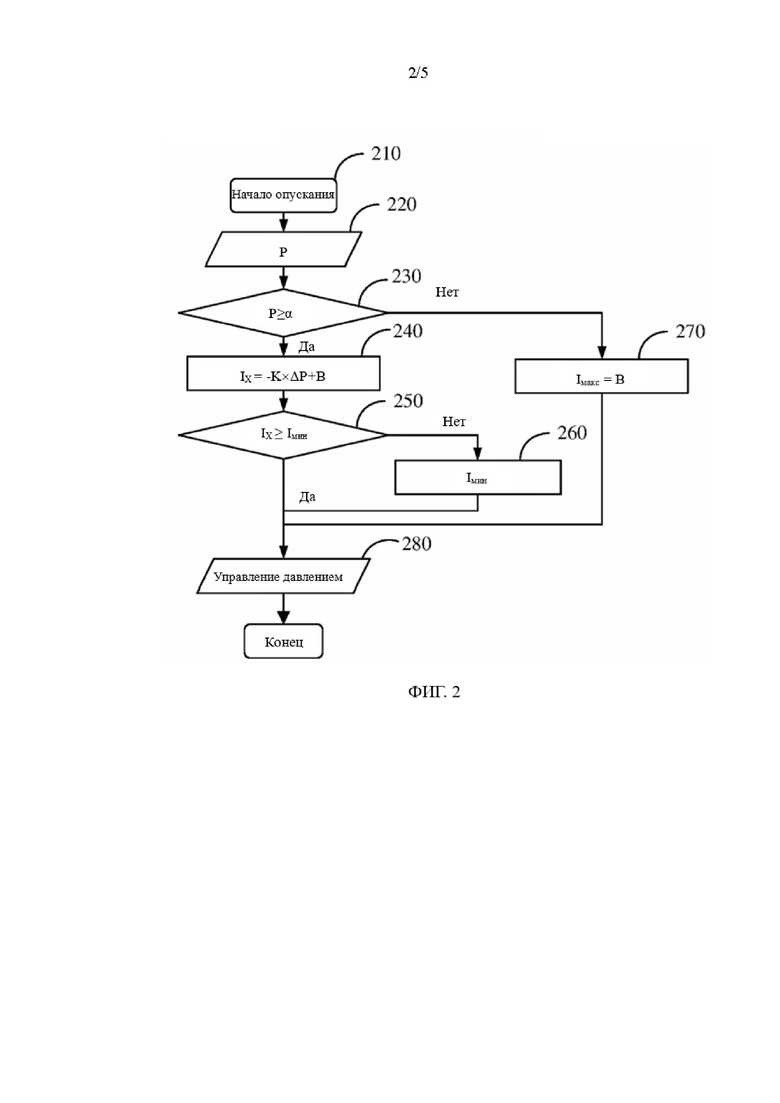
Например, как показано на ФИГ. 2, в начале опускания стрелы получают значение P давления бесштоковой полости цилиндра изменения выноса стрелы.
Этап 120: когда значение давления больше или равно заданному значению давления, для входного тока электрического пропорционального управляющего клапана устанавливают первый режим управления, причем первый режим управления включает множество первых подрежимов управления.
Как показано на ФИГ. 2, когда значение давления P бесштоковой полости цилиндра изменения выноса стрелы больше или равно заданному значению α (т.е., P ≥ α), для входного тока электрического пропорционального управляющего клапана устанавливают первый режим управления.
Этап 130: на основе скорости опускания стрелы, которая выбирается пользователем, в качестве входного тока электрического пропорционального управляющего клапана выбирают управляющий ток соответствующего первого подрежима управления.
В частности, стрела инженерной техники установлена на кузове транспортного средства, и стрелу приводят в движение посредством перемещения кузова транспортного средства. Например, в случае автомобильной насосной установки многосекционную стрелу складывают и затем помещают на верхнюю часть кузова грузовика. В случае грузового автомобиля с выдвижной лестницей секции лестницы складывают и втягивают, а затем опускают на кузов грузовика.
В настоящем изобретении в качестве примера взят кран, в котором переменная длина стрелы крана достигается за счет выдвижения и втягивания множества секций стрелы. Основание стрелы соединено с кузовом транспортного средства с помощью шкворня, а цилиндр 30 изменения выноса стрелы соединен между точкой сочленения цилиндра изменения выноса стрелы под стрелой и точкой сочленения цилиндра изменения выноса стрелы на кузове транспортного средства. В процессе работы изменение выноса стрелы достигается выдвижением и втягиванием цилиндра 30 изменения выноса стрелы. Когда цилиндр 30 изменения выноса стрелы выдвигается, стрела поднимается, а когда цилиндр 30 изменения выноса стрелы втягивается, стрела опускается.
Во время опускания стрелы скорость опускания стрелы управляется расходом гидравлического масла в бесштоковой полости цилиндра 30 изменения выноса стрелы, а расход гидравлического масла в бесштоковой полости может регулироваться путем управления степенью открытия золотника балансировочного клапана 20, соединенного с бесштоковой полостью. Кроме того, степенью открытия золотника балансировочного клапана 20 можно управлять посредством величины тока на входе электрического пропорционального управляющего клапана 50. Исходя из этого, в настоящем варианте осуществления скоростью опускания стрелы управляют за счет управления величиной тока на входе электрического пропорционального управляющего клапана 50.
Кроме того, в процессе опускания стрелы, когда величина P давления в бесштоковой полости цилиндра 30 изменения выноса стрелы превышает заданное значение α давления, скорость опускания стрелы становится больше и больше, и в таком случае устанавливают первый режим управления для входного тока электрического пропорционального управляющего клапана 50, причем первый режим управления включает в себя множество первых подрежимов управления. В частности, каждая скорость опускания стрелы соответствует одному из заданных входных токов, а для различных скоростей опускания имеются различные соответствующие входные токи, и входной ток электрического пропорционального управляющего клапана 50, соответствующий каждой скорости опускания, принимают за один из первых подрежимов управления. В результате входной ток электрического пропорционального управляющего клапана 50 регулируется в соответствии с управляющим током первого подрежима управления, соответствующего скорости опускания стрелы, выбираемой пользователем.
Например, в предположении, что угол опускания стрелы составляет от 75° до 0°, и в предположении, что обычная скорость опускания равна 1 °/с, в настоящем варианте осуществления множество первых подрежимов управления соответствуют скоростям опускания 1,5 °/с, 2 °/с, 2,5 °/с, 3 °/с и т.п., а каждая из различных скоростей опускания соответствует входном току электрических пропорциональных управляющих клапанов 50. Когда пользователь выбирает скорость опускания 2 °/с, контроллер берет управляющий ток заданного первого подрежима управления, соответствующего 2 °/с, в качестве входного тока электрического пропорционального управляющего клапана 50, чтобы управлять степенью открытия золотника балансировочного клапана 20.
Необязательно в одном варианте осуществления настоящего изобретения заданное значение давления может составлять 30 бар.
Согласно способу гидравлического управления опусканием, предложенному в варианте осуществления настоящего изобретения, путем установки первых подрежимов управления в соответствии со скоростями опускания стрелы могут быть выбраны различные первые подрежимы управления в соответствии с потребностями пользователя, и, таким образом, входной ток электрического пропорционального управляющего клапана может быть отрегулирован таким образом, чтобы скорость опускания стрелы могла регулироваться автоматически, и, следовательно, стрела опускалась с разными скоростями.
Кроме того, в одном варианте осуществления настоящего изобретения, как показано на ФИГ. 2, формула для вычисления первого режима управления может быть следующей: Ix = -K x ΔP + B,
где Ix - управляющий ток, K - коэффициент компенсации, ΔP - перепад давления бесштоковой полости цилиндра 30 изменения выноса стрелы в процессе опускания, а B - пусковой ток электрического пропорционального управляющего клапана 50 в начале опускания стрелы, при этом значения K и B могут быть установлены искусственно, а ΔP является постоянной величиной при одной и той же нагрузке, т.е. при одной и той же нагрузке значение ΔP одинаковое независимо от выбранной скорости опускания.
В частности, в процессе опускания стрелы, когда давление P бесштоковой полости цилиндра 30 изменения выноса стрелы больше или равно заданному значению α, то, как можно понять из вышеприведенной формулы, значение управляющего тока Ix будет меньше пускового тока, что, в свою очередь позволяет уменьшить скорость опускания стрелы и снизить ударное воздействие стрелы на гидравлическую систему во время опускания стрелы. Кроме того, в вышеприведенной формуле ΔP является постоянной величиной, поэтому при выборе различных значений K или значений B значение управляющего тока Ix тоже принимает множество значений, т.е. первый режим управления включает в себя множество первых подрежимов управления. Например, когда в качестве K берут K1, получают Ix1, соответствующий скорости опускания, т.е. первому из первых подрежимов управления; когда в качестве K берут K2, получают Ix2, соответствующий другой скорости опускания, т.е. второму из первых подрежимов управления, и т. д., что позволяет получить несколько скоростей опускания и тем самым, в свою очередь, реализовать управление скоростью опускания стрелы с использованием зубчатой передачи. При фактическом применении значение Ix, соответствующее каждому значению K или B, может быть выполнено в виде зубчатой передачи, и путем выбора различных передач во время работы может быть реализована автоматическая регулировка скорости опускания.
Необязательно, например, устанавливают множество кнопок, каждая из которых представляет передачу; или устанавливают вращаемую кнопку, каждое поворотное положение которой представляет передачу; или может быть установлен сенсорный экран, на котором вводят требуемую передачу. Контроллер вычисляет управляющий ток Ix в соответствии с формулой для вычисления первого подрежима управления, соответствующего передаче, которую выбирает пользователь, значение Ix принимается в качестве входного тока электрического пропорционального управляющего клапана 50, и, таким образом, осуществляется управление степенью открытия балансировочного клапана 20.
Кроме того, как показано на ФИГ. 2, если при этом значение управляющего тока Ix, вычисленное согласно вышеприведенной формуле, меньше минимального тока Iмин, то в качестве входного тока электрического пропорционального управляющего клапана принимается минимальный ток Iмин, чтобы предотвратить невозможность опускания стрелы.
Согласно способу гидравлического управления опусканием, предложенному в варианте осуществления настоящего изобретения, при установке первого режима управления управляющий ток на входе электрического пропорционального управляющего клапана меньше, чем пусковой ток, когда давление бесштоковой полости цилиндра изменения выноса стрелы постепенно увеличивается, что позволяет снизить скорость опускания стрелы и избежать ударного воздействия стрелы на систему гидравлического управления во время опускания стрелы.
В одном варианте осуществления настоящего изобретения способ гидравлического управления опусканием дополнительно включает: когда давление P меньше заданного значения α давления, установку второго режима управления для входного тока электрического пропорционального управляющего клапана. Как показано на ФИГ. 2, формула для вычисления второго режима управления, может быть следующей:
Iмакс = B;
где, Iмакс - максимальный ток управления, а B - пусковой ток.
В частности, когда значение давления бесштоковой полости цилиндра 30 изменения выноса стрелы меньше заданного значения давления, максимальный управляющий ток на входе электрического пропорционального управляющего клапана 50 представляет собой пусковой ток.
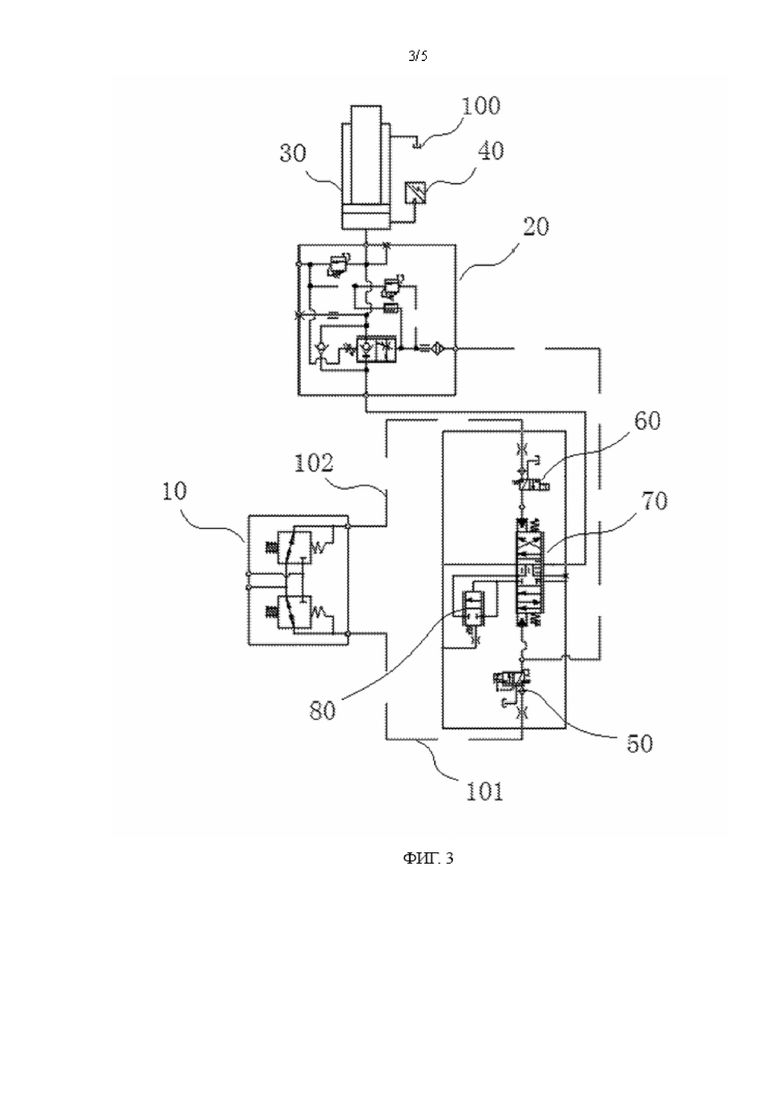
Как показано на ФИГ. 3, в варианте осуществления настоящего изобретения также предложена система гидравлического управления опусканием, содержащая: пилотный клапан 10, балансировочный клапан 20, цилиндр 30 изменения выноса стрелы, датчик 40 давления, электрический пропорциональный управляющий клапан 50, первый переключающий клапан 70 и контроллер. Первый управляющий конец первого переключающего клапана 70 соединен с пилотным клапаном 10 посредством первого масляного канала 101, электрический пропорциональный управляющий клапан 50 расположен на первом масляном канале 101, балансировочный клапан 20 соединен с одним отверстием для рабочего масла первого переключающего клапана 70, возвратное отверстие первого переключающего клапана 70 соединено с первым масляным баком (не показана на фигуре), а электрический пропорциональный управляющий клапан 50 выполнен с возможностью управления степенью открытия золотника балансировочного клапана 20. Бесштоковая полость цилиндра 30 изменения выноса стрелы соединена с балансировочным клапаном 20, а штоковая полость цилиндра 30 изменения выноса стрелы соединена со вторым масляным баком 100; датчик 40 давления расположен на бесштоковой полости цилиндра 30 изменения выноса стрелы; а контроллер управляет входным током электрического пропорционального управляющего клапана 50 в соответствии со значением давления, определяемым датчиком 40 давления, и скоростью опускания стрелы, которая выбирается пользователем.
В частности, пилотный клапан 10 соединен с источником масла со стабилизируемым давлением, пилотный клапан 10 соединен с управляющим концом первого переключающего клапана 70 посредством первого масляного канала 101, электрический пропорциональный управляющий клапан 50 расположен на первом масляном канале 101, и когда масло контура управления проходит через электрический пропорциональный управляющий клапан 50 для поступления в управляющий конец первого переключающего клапана 70, это может вызвать переключение первого переключающего клапана 70 в рабочее положение, так что гидравлическое масло в бесштоковой полости цилиндра 30 изменения выноса стрелы может протекать в первый масляный бак через первый переключающий клапан 70. Бесштоковая полость цилиндра 30 изменения выноса стрелы соединена с балансировочным клапаном 20, а штоковая полость цилиндра 30 изменения выноса стрелы соединена со вторым масляным баком 100.
Когда стрела опускается, первый переключающий клапан 70 переключается в рабочее положение под действием масла контура управления, и первый переключающий клапан 70 переключается в среднее рабочее положение или нижнее рабочее положение, так что первый масляный бак сообщается с балансировочным клапаном 20, штоковая полость цилиндра 30 изменения выноса стрелы всасывает масло из второго масляного бака 100, и гидравлическое масло в бесштоковой полости проходит через балансировочный клапан 20 и первый переключающий клапан 70, поступая в первый масляный бак, чтобы реализовать втягивание гидравлического штока цилиндра 30 изменения выноса стрелы, и тем самым реализовать опускание стрелы. Кроме того, контроллер управляет входным током на входе электрического пропорционального управляющего клапана 50 в соответствии со значением давления, определяемым датчиком давления, и скоростью опускания стрелы, выбираемой пользователем, тем самым осуществляется управление степенью открытия золотника балансировочного клапана 20, что позволяет управлять расходом гидравлического масла бесштоковой полости цилиндра 30 изменения выноса стрелы и, таким образом, регулировать скорость опускания стрелы.
Кроме того, на рабочей панели кабины инженерной техники могут быть предусмотрены кнопки, вращающаяся кнопка или сенсорный экран, и после того, как пользователь вводит скорость опускания стрелы, контроллер принимает сигнал и использует управляющий ток Ix, вычисленный по первому подрежиму управления в соответствии со скоростью опускания, в качестве входного тока электрического пропорционального управляющего клапана, а затем управляет степенью открытия золотника балансировочного клапана 20.
Необязательно электрический пропорциональный управляющий клапан 50 может представлять собой электрический пропорциональный редукционный клапан давления или электрический пропорциональный перепускной клапан, и в настоящем варианте осуществления выбран электрический пропорциональный редукционный клапан давления.
Согласно системе гидравлического управления опусканием, предложенной в варианте осуществления настоящего изобретения, посредством соединения электрического пропорционального управляющего клапана с балансировочным клапаном контроллер управляет входным током на входе электрического пропорционального управляющего клапана в соответствии со скоростью опускания стрелы, выбираемой пользователем, таким образом управляя степенью открытия золотника балансировочного клапана, так что скорость опускания стрелы во время опускания может свободно регулироваться, а стрела, таким образом, может опускаться с различными скоростями.
Как показано на ФИГ. 3, в одном варианте осуществления настоящего изобретения система гидравлического управления опусканием дополнительно содержит электромагнитный клапан 60, причем электромагнитный клапан 60 расположен на втором масляном канале 102, который соединяет второй управляющий конец первого переключающего клапана 70 с пилотным клапаном 10, а электромагнитный клапан 60 выполнен с возможностью управления соединением и отсоединением второго масляного канала 102.
В частности, пилотный клапан 10 соединен с рукояткой управления, и при перемещения рукоятки управления влево и вправо или вверх и вниз пилотный клапан 10 может сообщаться с первым регулирующим концом первого переключающего клапана 70 или со вторым управляющим концом первого переключающего клапана 70. В настоящем варианте осуществления пилотный клапан 10 сообщается с первым управляющим концом первого переключающего клапана 70, когда стрела опускается, и пилотный клапан 10 сообщается со вторым управляющим концом первого управляющего клапана 70, когда стрела поднимается.
Как показано на ФИГ. 5, электромагнитный клапан 60 имеет два рабочих положения, причем когда электромагнитный клапан 60 находится в правом рабочем положении, пилотный клапан 10 сообщается со вторым управляющим концом первого переключающего клапана 70, первый переключающий клапан 70 переключает рабочее положение в среднее рабочее положение, гидравлическое масло поступает в первый переключающий клапан 70 из пилотного клапана 10 и электромагнитного клапана 60 и вытекает из одного отверстия для рабочего масла первого переключающего клапана 70, это гидравлическое масло поступает в бесштоковую полость цилиндра 30 изменения выноса стрелы через балансировочный клапан 20, а гидравлическое масло из штоковой полости цилиндра 30 изменения выноса стрелы течет во второй масляный бак 100, благодаря чему реализуется выдвижение цилиндра 30 изменения выноса стрелы и, следовательно, осуществляется подъем стрелы.
Кроме того, в настоящем варианте осуществления первый переключающий клапан 70 представляет собой трехпозиционный шестиходовой переключающий клапан с гидравлическим управлением. Электромагнитный клапан 60 представляет собой двухпозиционный трехходовой электромагнитный клапан.
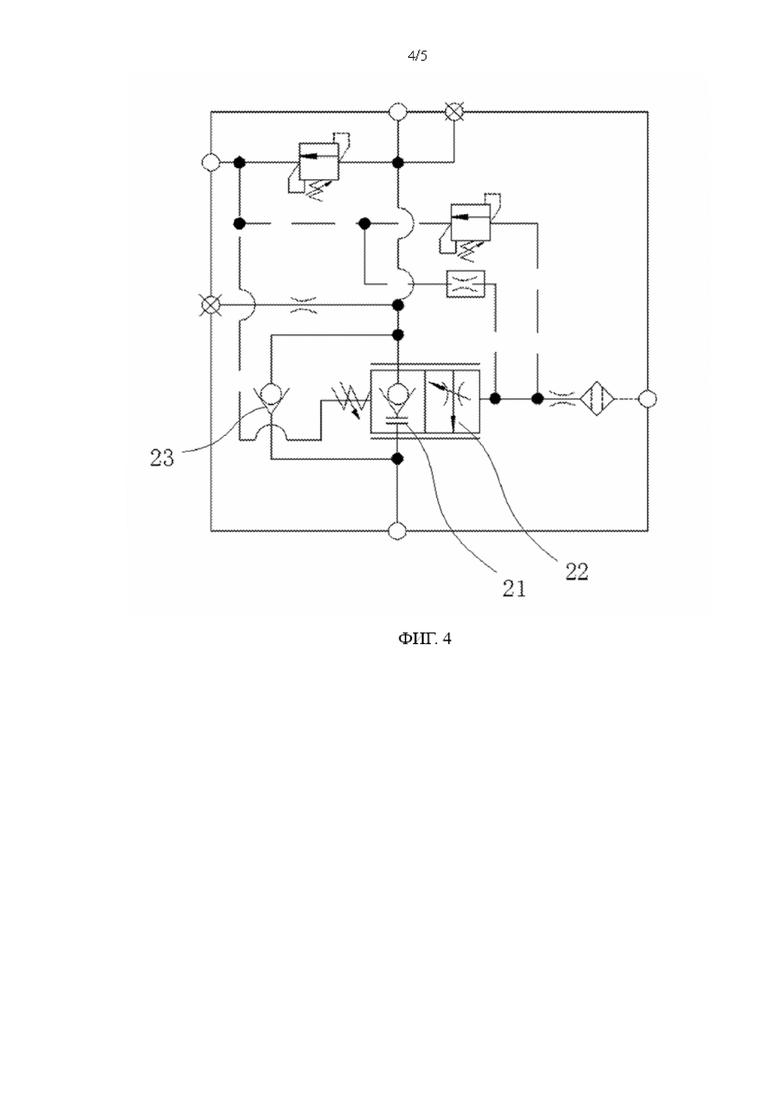
Как показано на ФИГ. 4, в одном варианте осуществления настоящего изобретения балансировочный клапан 20 содержит: второй переключающий клапан и первый обратный клапан 23, причем первый обратный клапан 23 соединен параллельно со вторым переключающим клапаном, второй переключающий клапан соединен с первым переключающим клапаном 70 и второй переключающий клапан имеет различные рабочие положения для достижения подачи масла в бесштоковую полость цилиндра 30 изменения выноса стрелы или возврата из нее.
В частности, как показано на ФИГ. 4, второй переключающий клапан содержит: второй обратный клапан 21 и дроссельный клапан 22. Когда второй обратный клапан переключен в первое рабочее положение, масловпускное отверстие второго обратного клапана 21 соединено с отверстием для рабочего масла первого переключающего клапана 70, а масловыпускное отверстие второго обратного клапана 21 соединено с бесштоковой полостью цилиндра 30 изменения выноса стрелы; а когда второй переключающий клапан переключен во второе рабочее положение, масловпускное отверстие дроссельного клапана 22 соединено с бесштоковой полостью цилиндра 30 изменения выноса стрелы, масловыпускное отверстие дроссельного клапана 22 соединено с отверстием для рабочего масла первого переключающего клапана 70, при этом электрический пропорциональный управляющий клапан 50 выполнен с возможностью управления степенью открытия золотника дроссельного клапана 22.
Когда стрела поднимается, второй переключающий клапан при этом переключается в первое рабочее положение, гидравлическое масло, вытекающее из отверстия для рабочего масла первого переключающего клапана 70, проходит через второй обратный клапан 21 и первый обратный клапан 23, а затем поступает в бесштоковую полость цилиндра 30 изменения выноса стрелы, штоковая полость возвращает масло, и цилиндр 30 изменения выноса стрелы выдвигается. Когда стрела опускается, гидравлическое масло из бесштоковой полости цилиндра 30 изменения выноса стрелы проходит через дроссельный клапан 22 и отверстие для рабочего масла первого переключающего клапана 70 и поступает в первый переключающий клапан 70, а затем вытекает из возвратного отверстия первого переключающего клапана 70 в первый масляный бак. Далее, когда стрела опускается, управление степенью открытия золотника дроссельного клапана 22 может осуществляться путем управления управляющим током на входе электрического пропорционального управляющего клапана 50, и тем самым достигается регулирование скорости опускания стрелы.
Как показано на ФИГ. 3, в одном варианте осуществления настоящего изобретения система гидравлического управления опусканием дополнительно содержит клапан 80 компенсации давления, причем клапан 80 компенсации давления соединен с первым переключающим клапаном 70.
В варианте осуществления настоящего изобретения также предложена инженерная техника, включающая в себя систему гидравлического управления опусканием.
В частности, инженерная техника может представлять собой автомобильную насосную установку, грузовой автомобиль с выдвижной лестницей, кран и т.д.
Согласно инженерной технике, предложенной в варианте осуществления настоящего изобретения, благодаря обеспечению системы гидравлического управления опусканием скорость опускания стрелы может свободно регулироваться, и стрела может опускаться с различными скоростями.
Наконец, следует отметить, что вышеупомянутые варианты осуществления используются только для иллюстрации технических решений настоящего изобретения, а не для ограничения ими; хотя настоящее изобретение было подробно описано со ссылкой на вышеупомянутые варианты осуществления, специалистам в данной области понятно, что они, тем не менее, могут модифицировать технические решения, описанные в вышеупомянутых вариантах осуществления, или произвести эквивалентные замены некоторых технических признаков; и эти модификации или замены не отделяют суть соответствующих технических решений от сущности и объема технических решений вариантов осуществления настоящего изобретения.
Способ гидравлического управления опусканием, система гидравлического управления опусканием и инженерная техника. Способ гидравлического управления опусканием включает: получение значения давления в бесштоковой полости цилиндра изменения выноса стрелы; когда значение давления больше или равно заданному значению давления, установление первого режима управления для входного тока электрического пропорционального управляющего клапана, причем первый режим управления включает множество первых подрежимов управления; и на основе скорости опускания стрелы, которая выбирается пользователем, выбор управляющего тока соответствующего первого подрежима управления в качестве входного тока электрического пропорционального управляющего клапана. Способ гидравлического управления опусканием решает проблему сложности регулирования скорости опускания стрелы; и посредством способа гидравлического управления опусканием могут быть выбраны различные первые подрежимы управления в соответствии с потребностями пользователя, и поэтому входной ток электрического пропорционального управляющего клапана может быть отрегулирован таким образом, чтобы скорость опускания стрелы могла регулироваться автоматически и, следовательно, стрела опускалась с разными скоростями. 3 н. и 12 з.п. ф-лы, 5 ил.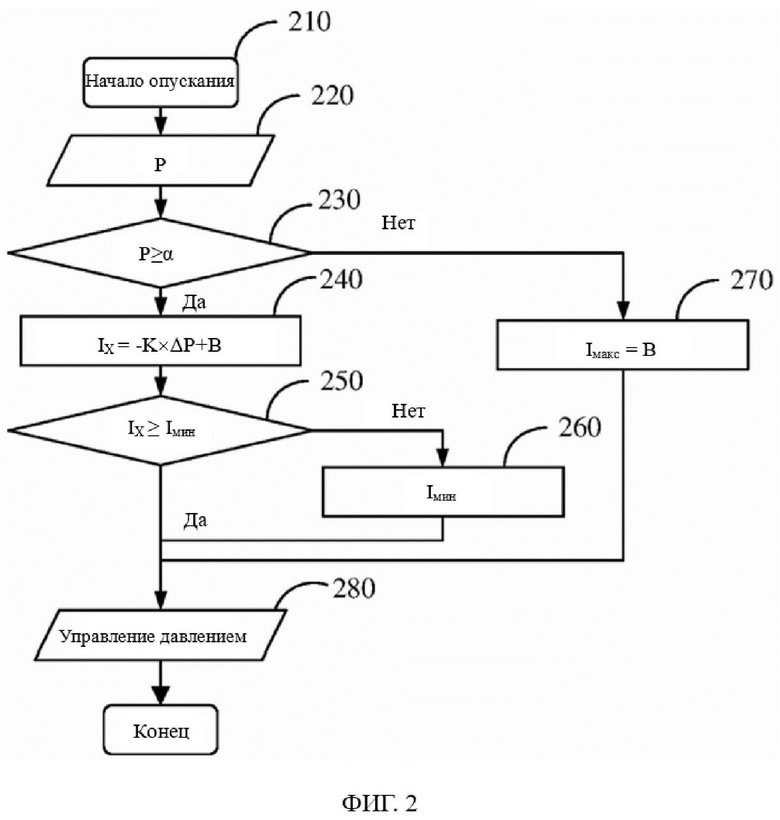
1. Способ гидравлического управления опусканием, отличающийся тем, что он включает:
получение значения давления бесштоковой полости цилиндра изменения выноса стрелы;
когда значение давления больше или равно заданному значению давления, установку первого режима управления для входного тока электрического пропорционального управляющего клапана, причем первый режим управления включает множество первых подрежимов управления; и
выбор, на основе скорости опускания стрелы, которая выбирается пользователем, управляющего тока соответствующего первого подрежима управления для управления входным током электрического пропорционального управляющего клапана.
2. Способ гидравлического управления опусканием по п. 1, отличающийся тем, что в первом режиме управления входной ток электрического пропорционального управляющего клапана получают в соответствии с коэффициентом компенсации, перепадом давления бесштоковой полости цилиндра изменения выноса стрелы и пусковым током электрического пропорционального управляющего клапана.
3. Способ гидравлического управления опусканием по п. 2, отличающийся тем, что, когда вычисленный управляющий ток больше или равен минимальному току для опускания стрелы, управляющий ток берут в качестве входного тока электрического пропорционального управляющего клапана, причем управляющий ток вычисляют по формуле:
Ix = -K × ∆P + B,
где Ix - управляющий ток, K - коэффициент компенсации, ΔP - перепад давления бесштоковой полости цилиндра изменения выноса стрелы в процессе опускания, а B - пусковой ток электрического пропорционального управляющего клапана.
4. Способ гидравлического управления опусканием по п. 2 или 3, отличающийся тем, что способ гидравлического управления опусканием дополнительно включает:
когда вычисленный управляющий ток меньше минимального тока для опускания стрелы, использование минимального тока в качестве входного тока электрического пропорционального управляющего клапана.
5. Способ гидравлического управления опусканием по любому из пп. 1-4, отличающийся тем, что способ гидравлического управления опусканием дополнительно включает:
когда значение давления меньше заданного значения давления, установку для входного тока электрического пропорционального управляющего клапана второго режима управления, причем во втором режиме управления пусковой ток подают на вход электрического пропорционального управляющего клапана в качестве максимального управляющего тока.
6. Система гидравлического управления опусканием, отличающаяся тем, что она содержит:
пилотный клапан, соединенный с источником масла со стабилизируемым давлением;
первый переключающий клапан, причем первый управляющий конец первого переключающего клапана соединен с пилотным клапаном посредством первого масляного канала, электрический пропорциональный управляющий клапан расположен на первом масляном канале, балансировочный клапан соединен с отверстием для рабочего масла первого переключающего клапана, возвратное отверстие первого переключающего клапана соединено с первым масляным баком, а электрический пропорциональный управляющий клапан выполнен с возможностью управления степенью открытия золотника балансировочного клапана;
цилиндр изменения выноса стрелы, при этом бесштоковая полость цилиндра изменения выноса стрелы соединена с балансировочным клапаном, а штоковая полость цилиндра изменения выноса стрелы соединена со вторым масляным баком;
датчик давления, расположенный в бесштоковой полости цилиндра изменения выноса стрелы; и
контроллер, причем контроллер выполнен с возможностью управления входным током электрического пропорционального управляющего клапана в соответствии со значением давления, определяемым датчиком давления, и скоростью опускания стрелы, выбираемой пользователем.
7. Система гидравлического управления опусканием по п. 6, отличающаяся тем, что она дополнительно содержит:
электромагнитный клапан, причем электромагнитный клапан расположен на втором масляном канале, который соединяет второй управляющий конец первого переключающего клапана с пилотным клапаном, и электромагнитный клапан выполнен с возможностью управления соединением и отсоединением второго масляного канала.
8. Система гидравлического управления опусканием по п. 7, отличающаяся тем, что электромагнитный клапан выполнен в виде двухпозиционного трехходового электромагнитного клапана.
9. Система гидравлического управления опусканием по любому из пп. 6-8, отличающаяся тем, что балансировочный клапан содержит:
второй переключающий клапан, причем второй переключающий клапан соединен с отверстием для рабочего масла первого переключающего клапана и второй переключающий клапан имеет различные рабочие положения для достижения подачи масла в бесштоковую полость цилиндра изменения выноса стрелы или возврата масла из нее; и
первый обратный клапан, причем первый обратный клапан соединен параллельно со вторым переключающим клапаном.
10. Система гидравлического управления опусканием по п. 9, отличающаяся тем, что второй переключающий клапан содержит:
второй обратный клапан, при этом, когда второй обратный клапан переключается в первое рабочее положение, масловпускное отверстие второго обратного клапана соединяется с отверстием для рабочего масла первого переключающего клапана, а масловыпускное отверстие второго обратного клапана соединяется с бесштоковой полостью цилиндра изменения выноса стрелы; и
дроссельный клапан, при этом, когда второй переключающий клапан переключается во второе рабочее положение, масловпускное отверстие дроссельного клапана соединяется с бесштоковой полостью цилиндра изменения выноса стрелы, а масловыпускное отверстие дроссельного клапана соединяется с отверстием для рабочего масла первого переключающего клапана, причем электрический пропорциональный управляющий клапан выполнен с возможностью управления степенью открытия золотника дроссельного клапана.
11. Система гидравлического управления опусканием по любому из пп. 6-10, отличающаяся тем, что она дополнительно содержит:
клапан компенсации давления, при этом датчик компенсации давления соединен с первым переключающим клапаном.
12. Система гидравлического управления опусканием по любому из пп. 6-11, отличающаяся тем, что электрический пропорциональный управляющий клапан выполнен в виде электрического пропорционального редукционного клапана давления или электрического пропорционального перепускного клапана.
13. Система гидравлического управления опусканием по любому из пп. 6-12, отличающаяся тем, то первый переключающий клапан выполнен в виде трехпозиционного шестиходового электромагнитного клапана с гидравлическим управлением.
14. Инженерная техника, отличающаяся тем, что она включает в себя систему гидравлического управления опусканием по любому из пп. 6-13.
15. Инженерная техника по п. 14, отличающаяся тем, что она включает автомобильную насосную установку, или грузовой автомобиль с выдвижной лестницей, или кран.
| RU 2024120489 A, 09.08.2024 | |||
| СИСТЕМА ПРИВОДА ТЕНТА С ДВОЙНЫМ СИЛОВЫМ ПРИВОДОМ И ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2785373C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| CN 112551398 A, 26.03.2021 | |||
| CN 102887435 A, 23.01.2013. | |||

