Изобретение относится к подъемно-транспортному машиностроению и касается гидравлического привода стреловых самоходных кранов большой грузоподъемности.
Известен гидравлический привод стрелового самоходного крана по авт.св. СССР N 1235814, МПК4 B 66 C 13/42, 1986 г, Известный гидравлический привод содержит источник питания, от которого жидкость поступает к четырем трехпозиционным распределителям с гидравлическим управлением, сообщающих источник питания с гидроцилиндрами соответственно механизмов выдвижения и подъема стрелы, гидромоторами соответственно поворота платформы и грузовой лебедки и гидроцилиндрами тормозов упомянутых гидромоторов. Из трехпозиционных распределителей жидкость через фильтр направляется в бак. Трехпозиционные распределители смонтированы в распределительном блоке. В последнем и в фильтре установлены предохранительные клапаны. Полости управления трехпозиционных распределителей через блоки клапанов сервоуправления сообщены магистралями с насосом управления и баком. При этом одни из полостей управления трехпозиционных распределителей механизма выдвижения и подъема стрелы и гидромотора грузовой лебедки через два клапана ИЛИ и дополнительные магистрали сообщены с двухпозиционным распределителем с электромагнитным управлением, который в одной своей позиции через дренажную линию сообщен с баком. Электромагнит двухпозиционного распределителя подсоединен к установленному на кране ограничителю грузового момента (ограничителю грузоподъемности) и при работе привода постоянно включен. При включении ограничителя грузоподъемности электромагнит отключается и золотник двухпозиционного распределителя перемещается в позицию, в которой одна из полостей управления соответствующего выполняемой операции трехпозиционного распределителя сообщается через дренажную линию с баком. Таким образом, с помощью двухпозиционного распределителя с электромагнитным управлением осуществляется защита крана от перегрузок в случае превышения допускаемого грузового момента.
Недостатком известного привода является то, что он не обеспечивает совмещение рабочих операций. Этот недостаток обусловлен тем, что исполнительные гидродвигатели имеют единственный источник питания, и в случае включения, например, двух операций совершаться будет только та операция, на выполнение которой требуется меньшее давление жидкости.
Кроме того, известный гидравлический привод предполагает использование в качестве источника питания насоса постоянной производительности, вследствие этого для изменения скорости работы крана на рабочей операции привод должен работать в режиме дросселирования соответствующего трехпозиционного распределителя, при этом часть жидкости, поступающей от насоса, стравливается через предохранительный клапан в бак. Это обстоятельство приводит к нагреву жидкости и снижению КПД привода в целом.
Вместе о этим в гидравлическом приводе не предусмотрена защита от перегрузок в случае превышения допускаемого грузового момента при выполнении операции поворота платформы, что снижает безопасность работы крана,
К недостаткам привода можно отнести также то, что при включении ограничителя грузоподъемности падает давление не только в линии управления соответствующего выполняемой операции трехпозиционного распределителя, но и напорной линии насоса управления, до тех пор, пока машинист не вернет рукоятку управления в исходное положение. Кроме того, в приводе не предусмотрена защита насоса при запуске его под нагрузку при температуре жидкости, не соответствующей диапазону ее рабочих температур.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является гидравлический привод стрелового самоходного крана по патенту РФ N 2131334, МПК6 B 66 C 13/42, 1997 г., который и выбран в качестве ближайшего аналога-прототипа. Известный гидравлический привод стрелового самоходного крана содержит ограничитель грузового момента, источник питания, представляющий собой два аксиально-поршневых регулируемых насоса, каждый - с регулятором мощности, гидроцилиндры соответственно механизмов выдвижения и подъема стрелы, снабженные тормозами с гидроцилиндрами, гидромоторы соответственно поворота платформы и грузовой лебедки, сообщенные через соответствующие трехпозиционные распределители с источником питания и баком. Полости управления трехпозиционных распределителей посредством магистралей сообщены с насосом управления и баком. При этом в магистрали между насосом управления и полостями управления трехпозиционных распределителей установлен пневмогидроаккумулятор. Гидравлический привод снабжен средством для автоматической термозащиты упомянутых аксиально-поршневых регулируемых насосов. Последнее выполнено в виде двух предохранительных клапанов давления, каждый из которых установлен в напорной магистрали соответствующего насоса и сообщен с баком через соответствующий двухпозиционный распределитель с электромагнитным управлением в одной его позиции. Упомянутый двухпозиционный распределитель связан с установленным в баке датчиком температуры.
В сравнении с вышерассмотренным гидравлическим приводом в этом устройстве обеспечивается повышение КПД привода благодаря исключению потерь на дросселирование в гидрораспределителях. Вместе с этим обеспечивается возможность совмещения по меньшей мере двух рабочих операций, а также повышение безопасности работы крана благодаря обеспечению защиты привода от перегрузок в случае превышения допускаемого грузового момента при выполнении любой операции. Кроме того, устройство позволяет повысить надежность гидравлического привода благодаря тому, что предусмотрена защита насосов при запуске их под нагрузкой при температуре рабочей жидкости, не соответствующей диапазону ее рабочих температур.
Недостатком известного гидравлического привода является то, что регулирование скорости исполнительных гидродвигателей осуществляется только путем изменения подачи насосов, что вызывает достаточно резкое изменение скорости исполнительных гидродвигателей, следствием чего являются значительные ускорения при работе привода и динамические нагрузки, например, при посадке стрелы на упор и т.п.
Кроме того, известный гидравлический привод не предполагает обеспечение суммирования расходов аксиально-поршневых регулируемых насосов при отсутствии совмещения рабочих операций, В известном гидравлическом приводе каждый из аксиально-поршневых регулируемых насосов обеспечивает выполнение определенных рабочих операций, при этом не предполагается возможность использования насоса для всех дополнительных гидродвигателей крана. Вместе с этим при отсутствии совмещения рабочих операций возможность суммирования подачи двух насосов на одной рабочей операции позволила бы увеличить скорость выполнения этой операции, в частности при холостых движениях, т.е. без груза.
К недостаткам известного гидравлического привода можно отнести также то, что в нем не предусмотрены средства для приведения крана в транспортировочное положение при отказе аксиально-поршневых регулируемых насосов, что особенно важно для железнодорожных кранов, работающих на действующих железнодорожных магистралях.
Задачей настоящего изобретения является повышение производительности работы стрелового самоходного крана и расширение возможности регулирования скорости выполнения рабочих операций крана.
Решение указанной задачи обеспечивается тем, что в известном гидравлическом приводе стрелового самоходного крана, содержащем ограничитель грузового момента, источник питания, представляющий собой два аксиально-поршневых регулируемых насоса, каждый - с регулятором мощности, гидроцилиндры соответственно механизмов выдвижения и подъема стрелы, снабженные тормозами с гидроцилиндрами гидромоторы соответственно поворота платформы и грузовой лебедки, сообщенные через соответствующие трехпозиционные распределители с источником питания и баком, причем полости управления трехпозиционных распределителей посредством магистралей сообщены с насосом управления и баком, при этом в магистрали между насосом управления и полостями управления трехпозиционных распределителей установлен пневмогидроаккумулятор, согласно изобретению упомянутые трехпозиционные распределители являются элементами распределительного блока с электрогидравлическим пропорциональным управлением. Гидравлический привод дополнительно снабжен вторым распределительным блоком с электрогидравлическим пропорциональным управлением, который включает трехпозиционные распределители, с помощью которых гидроцилиндры соответственно механизмов выдвижения и подъема стрелы и гидромотор грузовой лебедки дополнительно соединены с источником питания и баком. Полости управления трехпозиционных распределителей второго распределительного блока через магистрали сообщены с насосом управления и баком. Упомянутые распределительные блоки включают каждый регуляторы давления с электромагнитным управлением, связанные с ограничителем грузового момента, и манипулятор. Манипуляторы электрически связаны с соответствующими электромагнитами регуляторов давления. При этом каждый манипулятор выполнен с возможностью электрической связи с электромагнитами регуляторов давления другого распределительного блока. Каждый распределительный блок сообщен с одним из аксиально-поршневых регулируемых насосов.
Кроме того, гидравлический привод снабжен двумя двухпозиционными распределителями с пропорциональным управлением, каждый из которых сообщен с регулирующим органом системы управления подачи жидкости соответствующего аксиально-поршневого регулируемого насоса и баком.
Вместе с этим гидравлический привод имеет дополнительный насос с автономным двигателем, первый и второй трехпозиционные распределители с ручным управлением и клапан давления. Упомянутый насос управления выполнен с возможностью подключения к внешнему источнику электроэнергии и сообщен с дополнительным насосом и упомянутыми аксиально-поршневыми регулируемыми насосами через первый трехпозиционный распределитель с ручным управлением. При этом дополнительный насос через первый трехпозиционный распределитель с ручным управлением сообщен с пневмогидроаккумулятором и через клапан давления, второй трехпозиционный распределитель с ручным управлением и соответствующие обратные клапаны через упомянутые распределительные блоки сообщен с гидроцилиндрами соответственно механизмов выдвижения и подъема стрелы и гидромоторами соответственно поворота платформы и грузовой лебедки. Такое исполнение обеспечивает возможность приведения стрелового самоходного крана в транспортировочное положение при отказе аксиально-поршневых регулируемых насосов, а также позволяет сократить время приведения крана в транспортировочное положение.
Технический результат использования изобретения состоит в том, что, в сравнении с известным гидравлическим приводом, обеспечивается возможность увеличения скорости выполнения рабочих операций, когда нет их совмещения, а также обеспечивается расширение возможности регулирования скорости выполнения рабочих операций. Кроме того, изобретение позволяет повысить надежность привода благодаря тому, что предусмотрена возможность приведения крана в транспортировочное положение при отказе аксиально-поршневых регулируемых насосов.
На чертеже представлена принципиальная схема гидравлического привода стрелового самоходного крана.
В варианте осуществления изобретения гидравлический привод используется в железнодорожном стреловом самоходном кране, предназначенном для погрузочно-разгрузочных и восстановительных работ.
Гидравлический привод стрелового самоходного крана содержит гидромотор 1 привода поворота платформы, снабженный тормозом с гидроцилиндром 2, гидроцилиндр 3 механизма выдвижения стрелы, гидроцилиндр 4 подъема стрелы, гидромотор 5 грузовой лебедки, снабженный тормозом с гидроцилиндром 6. Упомянутые исполнительные гидродвигатели соответственно связаны с распределительными блоками 7 и 8 с электрогидравлическим пропорциональным управлением. Распределительный блок 7 включает трехпозиционные распределители 9 - 12, а распределительный блок 8 - трехпозиционные распределители 13 - 15, Каждый распределительный блок включает также регуляторы давления соответственно 16 - 23 и 24 - 29 с электромагнитным управлением, связанные с установленным на кране ограничителем грузового момента, и манипулятор (на чертеже не показаны). В варианте осуществления изобретения ограничитель грузового момента представляет собой систему, которая включает ЭВМ, датчик массы поднимаемого груза, датчик длины выдвижения стрелы, датчик угла поворота поворотной части и датчик крена платформы (на чертеже не показаны). Манипуляторы являются элементами системы управления распределительными блоками 7 и 8 и размещаются в кабине машиниста. Рукоятка каждого манипулятора управляет датчиками-потенциометрами, связанными с блоком управления (на чертеже не показан). Отклонение рукоятки манипулятора от нейтрального положения приводит к подаче управляющего сигнала на соответствующие электромагниты регуляторов давления 16 - 29, что в трехпозиционных распределителях приводит к изменению давления управления пропорционально углу отклонения рукоятки манипулятора, В результате золотник трехпозиционного распределителя обещается в сторону меньшего усилия.
В варианте осуществления изобретения рукоятка манипулятора, связанного с распределительным блоком 7 относительно рабочего места машиниста крана, расположена, например, слева от рукоятки манипулятора, связанного с распределительным блоком 8, Каждый манипулятор электрически связан с электромагнитами регуляторов давления соответствующего распределительного блока. При этом каждый манипулятор выполнен с возможностью электрической связи с электромагнитами регуляторов давления другого распределительного блока. В варианте выполнения левый манипулятор выполнен с возможностью электрической связи с электромагнитами регуляторов давления 26, 29 трехпозиционного распределителя 15, входящего в распределительный блок 8, а правый манипулятор - с возможностью электрической связи с электромагнитами регуляторов давления 20 - 23 трехпозиционных распределителей 11 и 12, входящих в распределительный блок 7. Подключение манипулятора к электромагнитам регуляторов давления другого распределительного блока осуществляется при помощи соответствующих тумблеров (кнопок), расположенных на рукоятке манипулятора (на чертеже не показано).
Гидромотор 1 привода поворота платформы гидравлически связан с трехпозиционным распределителем 9. Гидроцилиндр 3 механизма выдвижения стрелы гидравлически связан с трехпозиционными распределителями 10 и 15. Гидроцилиндр 4 подъема стрелы гидравлически связан с трехпозиционными распределителями 11 и 13. Гидромотор 5 грузовой лебедки гидравлически связан с трехпозиционными распределителями 12 и 14. Через трехпозиционные распределители 9 - 15 исполнительные гидродвигатели сообщены с источником питания и баком 30. Источник питания представляет собой два аксиально-поршневых регулируемых насоса 31 и 32, каждый - с регулятором мощности. В качестве подобного насоса может быть использован, например, насос типа НК 32 (изготовитель - АО "Пролетарский завод", Санкт- Петербург). Насосы 31 и 32 сообщены соответственно с распределительными блоками 7 и 8.
Насосы 31 и 32 имеют систему управления, питающуюся от насоса управления 33. Последний выполнен с возможностью подключения к внешнему источнику электроэнергии. В варианте выполнения изобретения гидравлический привод имеет дополнительный насос 34 с автономным, например, дизельным двигателем. Полости управления трехпозиционных распределителей 9 - 15 через соответствующие регуляторы давления 16 - 29 и напорную и сливную магистрали 35, 36 сообщены с насосом управления 33 и баком 30. В магистрали между насосом управления 33 и полостями управления трехпозиционных распределителей 9 - 15 установлен автоматически подзаряжаемый пневмогидроаккумулятор 37 с гидроклапанами 38 - 40. В качестве последнего может быть использован, например, пневмогидроаккумулятор с гидроклапанами типа 64000 А (изготовитель - ПО "Московский машиностроительный завод им. Калинина"). От насоса управления 33 жидкость через обратный клапан 41 поступает по магистрали 42 к редукционному клапану 36, а от него - к предохранительному клапану 39 и обратному клапану 40 и далее - к пневмогидроаккумулятору 37 и на входы регуляторов давления 16 - 29. Предохранительный клапан 43 насоса управления 33 связан с баком 30.
В варианте выполнения изобретения гидравлический привод снабжен двумя двухпозиционными распределителями 44 и 45 с пропорциональным управлением. Двухпозиционные распределители 44 и 45 сообщены с баком 30 и через магистрали соответственно 46 и 47 сообщены с регулирующих органом системы управления подачи жидкости аксиально-поршневого регулируемого насоса соответственно 31 и 32. При этом золотники двухпозиционных распределителей 44 и 45 связаны с педалями управления, которые размещены в кабине машиниста.
В варианте выполнения изобретения гидравлический привод имеет первый и второй трехпозиционные распределители 48, 49 с ручным управлением и клапан давления 50. Насос управления 33 сообщен с дополнительным насосом 34 и аксиально-поршневыми регулируемыми насосами 31, 32 через первый трехпозиционный распределитель 48. При этом дополнительный насос 34 через первый трехпозиционный распределитель 48 также сообщен с автоматически подзаряжаемым пневмогидроаккумулятором 37 и через клапан 50, второй трехпозиционный распределитель 49 и обратные клапаны 51 и 52 через распределительные блоки 7 и 8 сообщен с гидроцилиндрами 3, 4 соответственно механизмов выдвижения и подъема стрелы и гидромоторами 1, 5 соответственно поворота платформы и грузовой лебедки.
От насоса управления 33 давление управления, например 5,0-5,5 МПа, подается через первый трехпозиционный распределитель 48 по магистрали 53 в систему управления подачи жидкости насосов 31, 32 или по магистрали 54 к клапану давления 50, Давление управления насоса 33 определяется настройкой предохранительного клапана 43. Через второй трехпозиционный распределитель 49 жидкость от дополнительного насоса 34 подается под давлением через обратные клапаны 51 и 02 в магистрали 55 и 56 к распределительным блоках 7 и 8 и далее к исполнительным гидродвигателям. Сливные магистрали распределительных блоков 7 и 8 соединены с общей сливной магистралью 36 гидросистемы. Давление управления, например 3 МПа, с пневмогидроаккумулятора 37 подается по магистрали 35 к распределительным блокам 7 и 8. Дренажные магистрали упомянутых блоков соединены с общей дренажной магистралью 57 гидросистемы. В сливной магистрали 36 установлен фильтр 58. Защиту насосов 33 и 34 от обратного потока жидкости обеспечивают обратные клапаны 41 и 59. Аксиально-поршневые регулируемые насосы 31, 32 защищены от перегрузки соответственно и предохранительными клапанами 60 и 61, смонтированными в распределительных блоках 7 и 8. В баке 30 установлен датчик 62 температуры масла. Растормаживание гидромоторов 1 и 5 соответственно привода поворота платформы и грузовой лебедки производится подачей жидкости через соответствующие клапаны ИЛИ 63 и 64.
Гидравлический привод стрелового самоходного крана работает следующим образом.
Перед началом работы крана включают электропитание (например, 24 В) электромагнитов регуляторов давления 16-29 распределительных блоков 7 и 8 и манипуляторов, расположенных в кабине машиниста. Включают насос управления 33 и через обратный клапан 41 жидкость под давлением, например 5,0-5,5 МПа, соответствующим настройке предохранительного клапана 43 по магистрали 42 поступает к пневмогидроаккумулятору 37 с гидроклапанами 38-40. После редукционного клапана 38 давление жидкости становится равным, например 3 МПа. Предохранительный клапан 39 настроен на величину, например, 4 МПа. Отредуцированное давление через обратный клапан 40 поступает в пневмогидроаккумулятор и заряжает его до этой величины, после чего давление управления поступает по магистрали 35 в распределительные блоки 7 и 8 к регуляторам давления 16-29, подготавливая последние к работе в пропорциональном режиме управления. После включения первого трехпозиционного распределителя 48 с ручным управлением в правую позицию давление управления от насоса управления 33 по магистрали 53 поступает в систему управления насосов 31 и 32 и далее из системы управления насосов по магистралям 46 и 47 поступает к двухпозиционным распределителям 44 и 45, подготавливая их к работе, После включения насоса управления 33 и аксиально-поршневых регулируемых насосов 31 и 32 последние до тех пор, пока не будет воздействия машиниста на педали управления, связанные с золотниками двухпозиционных распределителей 44 и 45, подавать жидкость в магистрали 55 и 56 не будут, так как угол наклона люльки каждого насоса равен 0o, и расход каждого насоса также равен нулю.
При повороте платформы крана, например влево, машинист крана отклоняет влево рукоятку манипулятора распределительного блока 7. Отклонение рукоятки манипулятора от нейтрального положения приводит к подаче управляющего сигнала на электромагнит регулятора давления 16. Электромагнит с переменным усилием, пропорциональным углу отклонения рукоятки манипулятора, воздействует на редукционный клапан регулятора давления. Редукционный клапан выдает на выходе переменное редукционное давление в пределах, например, 0 - 3 МПа, которое поступает к соответствующему торцу золотника трехпозиционного распределителя 9. Золотник трехпозиционного распределителя перемещается вниз (по чертежу). Одновременно машинист крана воздействует на педаль управления, связанную с золотником двухпозиционного распределителя 44. При этом в системе управления насоса 31 нарушается равновесие, так как магистраль 46 системы управления соединяется с дренажной магистралью. В зависимости от величины перемещения золотника двухпозиционного распределителя изменяется величина дроссельного отверстия, величина утечек через него и величина рассогласования в системе управления насоса 31. Нарушение равновесия в системе управления насоса приводит к изменению угла наклона люльки насоса от 0o до 25o, в зависимости от величины перемещения связанного с педалью управления золотника, и к изменению подачи насоса соответственно от 0 до 200 л/мин. При этом в гидроцилиндр 2 тормоза гидромотора 1 через клапан ИЛИ 63 из соответствующей магистрали подачи жидкости в гидромотор будет подведено давление, которое приведет к растормаживанию гидромотора. Платформа крана начнет поворачиваться влево. При отклонении рукоятки манипулятора влево до конца и полном ходе золотника двухпозиционного распределителя 44 в гидромотор 1 привода поворота платформы будет поступать полный расход от насоса 31, и платформа крана будет иметь наибольшую скорость поворота. Скорость поворота платформы крана может регулироваться либо путем изменения подачи насоса 31 посредством изменения величины перемещения золотника двухпозиционного распределителя 44 с помощью соответствующей педали управления, либо посредством изменения угла отклонения рукоятки манипулятора и дросселирования на кромке золотника трехпозиционного распределителя 9. Первый способ регулирования скорости поворота платформы является сравнительно грубым и используется при работе крана без нагрузки. Второй способ регулирования скорости - более тонкий и используется при работе крана с грузом, а также для снижения динамических нагрузок на кран при повороте платформы в режиме торможения и при подходе платформы к упору.
Поворот вправо платформы крана осуществляется аналогично посредством отклонения рукоятки манипулятора, связанного с распределительным блоком 7, вправо. При этом управляющий сигнал поступает на электромагнит регулятора давления 17, и золотник трехпозиционного распределителя 9 перемещается вверх (по чертежу), в результате чего жидкость в гидромотор 1 поворота платформы будет поступать по другой магистрали подачи жидкости. Соответственно срабатывает клапан ИЛИ 63, в результате чего в гидроцилиндр 2 тормоза гидромотора будет подведено давление, которое приведет к растормаживанию гидромотора. Платформа крана начнет поворачиваться вправо.
При выдвижении подвижных секций телескопической стрелы машинист крана отклоняет вперед (от себя) рукоятку манипулятора, связанного с распределительным блоком 7. Отклонение рукоятки манипулятора от нейтрального положения приводит к подаче управляющего сигнала на электромагнит регулятора давления 16. Золотник трехпозиционного распределителя 10 перемещается вниз (по чертежу). Одновременно машинист крана воздействует на педаль управления, связанную с золотником двухпозиционного распределителя 44. Жидкость под давлением от насоса 31 поступает в поршневую полость гидроцилиндра 3 механизма выдвижения стрелы. Регулирование скорости выдвижения стрелы осуществляется аналогично регулированию скорости поворота платформы крана. Для большего увеличения скорости выдвижения стрелы, при отсутствии совмещения рабочих операций крана, машинист посредством соответствующего тумблера подключает манипулятор, связанный с распределительным блоком 7, к электромагниту регулятора давления 28 распределительного блока 8. В результате этого при отклонении рукоятки упомянутого манипулятора вперед управляющий сигнал поступает одновременно на электромагниты регуляторов давления 18 и 28 и соответственно перемещаются вниз (по чертежу) золотники двух трехпозиционных распределителей 10 и 15. Одновременно машинист крана воздействует на педали управления, соответственно связанные с золотниками двухпозиционных распределителей 44 и 45. В результате в гидроцилиндр 3 механизма выдвижения стрелы поступает жидкость под давлением от двух насосов: от насоса 31 через трехпозиционный распределитель 10 и от насоса 32 через трехпозиционный распределитель 15. Таким образом, выдвижение подвижных секций телескопической стрелы крана происходит, например, с удвоенной скоростью, что позволяет существенно сократить время выдвижения секций телескопической стрелы.
Втягивание подвижных секций телескопической стрелы осуществляется аналогично посредством отклонения рукоятки манипулятора, связанного с распределительным блоком 7, назад (на себя). При этом управляющий сигнал поступает на электромагнит регулятора давления 19 и золотник трехпозиционного распределителя 10 перемещается вниз (по чертежу). При воздействии на педаль управления, связанную с золотником двухпозиционного распределителя 44, жидкость под давлением от насоса 31 поступает в штоковую полость гидроцилиндра 3. Для большего увеличения скорости втягивания стрелы, при отсутствии совмещения рабочих операций крана, машинист посредством соответствующего тумблера подключает манипулятор, обязанный с распределительным блоком 7, к электромагниту регулятора давления 29 распределительного блока 8. В результате этого при отклонении рукоятки упомянутого манипулятора назад управляющий сигнал поступает одновременно на электромагниты регуляторов давления 19 и 29 и соответственно перемещаются вверх (по чертежу) золотники двух трехпозиционных распределителей 10 и 15. Одновременно машинист крана воздействует на педали управления, соответственно связанные с золотниками двухпозиционных распределителей 44 и 45. В результате в штоковую полость гидроцилиндра 3 механизма выдвижения стрелы поступает жидкость под давлением от обоих насосов 31 и 32. Таким образом, втягивание подвижных секций стрелы происходит, например, с удвоенной скоростью.
При подъеме стрелы машинист крана отклоняет влево рукоятку манипулятора распределительного блока 8. При этом управляющий сигнал поступает на электромагнит регулятора давления 24 и золотник трехпозиционного распределителя 13 перемещается вниз (по чертежу). При воздействии на педаль управления, связанную с золотником двухпозиционного распределителя 45, жидкость под давлением от насоса 32 поступает в поршневую полость гидроцилиндра 4 подъема стрелы, а из штоковой полости упомянутого гидроцилиндра жидкость вытесняется через золотник трехпозиционного распределителя 13 в сливную магистраль 36 и далее через фильтр 50 в бак 30. Для большего увеличения скорости подъема стрелы, при отсутствии совмещения рабочих операций крана, машинист посредством соответствующего тумблера подключает манипулятор, связанный с распределительным блоком 8, к электромагниту регулятора давления 20 распределительного блока 7. В результате этого при отклонении рукоятки упомянутого манипулятора влево управляющий сигнал поступает одновременно на электромагниты регуляторов давления 24 и 20 и соответственно перемещаются вниз (по чертежу) золотники двух трехпозиционных распределителей 13 и 11. Одновременно машинист крана воздействует на педали управления, соответственно связанные с золотниками двухпозиционных распределителей 44 и 45. В результате в поршневую полость гидроцилиндра 4 подъема стрелы поступает жидкость под давлением от обоих насосов 31 и 32. Таким образом, подъем стрелы происходит, например, с удвоенной скоростью.
Опускание стрелы крана осуществляется аналогично посредством отклонения рукоятки манипулятора, связанного с распределительным блоком 8, вправо. При этом управляющий сигнал поступает на электромагнит регулятора давления 25 и золотник трехпозиционного распределителя 13 перемещается вверх (по чертежу). При воздействии на педаль управления, связанную с золотником двухпозиционного распределителя 45, жидкость от насоса 32 поступает в штоковую полость гидроцилиндра 4 подъема стрелы. Происходит опускание стрелы крана. Для большего увеличения скорости опускания стрелы, при отсутствии совмещения рабочих операций крана, машинист посредством соответствующего тумблера подключает манипулятор, связанный с распределительным блоком 8, к электромагниту регулятора давления 21 распределительного блока 7. В результате этого при отклонении рукоятки упомянутого манипулятора вправо управляющий сигнал поступает одновременно на электромагниты регуляторов давления 25 и 21 и соответственно перемещаются вверх (по чертежу) золотники двух трехпозиционных распределителей 13 и 11. Одновременно машинист крана воздействует на педали управления, соответственно связанные с золотниками двухпозиционных распределителей 40 и 44. В результате в штоковую полость гидроцилиндра 4 подъема стрелы поступает жидкость под давлением от обоих насосов 31 и 32, и подъем стрелы происходит, например, с удвоенной скоростью.
При подъеме груза машинист отклоняет назад (на себя) рукоятку манипулятора распределительного блока 8. При этом управляющий сигнал поступает на электромагнит регулятора 26, и золотник трехпозиционного распределителя 14 перемещается вниз (по чертежу). При воздействии на педаль управления, связанную с золотником двухпозиционного распределителя 45, жидкость под давлением от насоса 32 поступает по магистрали 56 через трехпозиционный распределитель 14 в гидромотор 5 грузовой лебедки и одновременно через клапан ИЛИ 64 - в гидроцилиндцр 6 тормоза упомянутого гидромотора. Гидромотор растормаживается, и осуществляется подъем груза. Для большего увеличения скорости подъема груза, при отсутствии совмещения рабочих операций крана, машинист посредством соответствующего тумблера подключает манипулятор, связанный с распределительным блоком 8, к электромагниту регулятора давления 22 распределительного блока 7. В результате этого при отклонении рукоятки упомянутого манипулятора назад (на себя) управляющий сигнал поступает одновременно на электромагниты регуляторов давления 26 и 22 и соответственно перемещаются (по чертежу) золотники трехпозиционных распределителей 12 и 14. Одновременно машинист крана воздействует на педали управления, соответственно связанные с золотниками двухпозиционных распределителей 44 и 45. В результате в гидромотор грузовой лебедки поступает жидкость под давлением от двух насосов: от насоса 31 через магистраль 55 и трехпозиционный распределитель 12 и от насоса 32 через магистраль 56 и трехпозиционный распределитель 14. Таким образом, подъем груза происходит, например, с удвоенной скоростью.
Опускание груза осуществляется аналогично посредством отклонения рукоятки манипулятора, связанного с распределительным блоком 8, вперед (от себя). При этом управляющий сигнал поступает на электромагнит регулятора давления 27 и золотник трехпозиционного распределителя 14 перемещается вверх (по чертежу). При воздействии на педаль управления, связанную с золотником двухпозиционного распределителя 45, жидкость под давлением от насоса 32 поступает в гидромотор 5 грузовой лебедки. Соответственно срабатывает клапан ИЛИ 64, в результате чего в гидроцилиндр 6 тормоза гидромотора будет подведено давление, которое приведет к растормаживанию гидромотора и груз будет опускаться. Для большего увеличения скорости опускания груза, при отсутствии совмещения операций, машинист посредством соответствующего тумблера подключает манипулятор, связать о распределительным блоком 8, к регулятору давления 23 распределительного блока 7, В результате этого при отклонении рукоятки упомянутого манипулятора вперед (от себя) управляющий сигнал поступает одновременно на электромагниты регуляторов давления 27 и 23, и соответственно перемещаются вверх (по чертежу) золотники трехпозиционных распределителей 12 и 14. Одновременно машинист крана воздействует на педали управления, соответственно связанные с золотниками двухпозиционных распределителей 44 и 45. В результате в гидромотор 5 грузовой лебедки поступает жидкость под давлением от двух насосов 31 и 32, и опускание груза происходит, например, с удвоенной скоростью.
Совмещение рабочих операций крана обеспечивается путем соответствующей комбинации положений рукояток манипуляторов распределительных блоков 7 и 8. При этом каждый манипулятор электрически связан с электромагнитами регуляторов давления своего распределительного блока. Совмещение операций производится при воздействии одновременно на обе педали управления, соответственно связанные с золотниками двухпозиционных распределителей 44 и 45. Благодаря тому, что на каждой из совмещаемых рабочих операций используется свой насос, совмещение операций обеспечивается независимо от величины нагрузки на каждый исполнительный гидродвигатель.
Безопасность работы в случае превышения допускаемого грузового момента обеспечивается ограничителем грузового момента, связанным с регуляторами давления 16-29 распределительных блоков 7 и 8. При превышении допускаемого грузового момента от ЭВМ поступает управляющий сигнал на электромагнит регулятора давления трехпозиционного распределителя, соответствующего выполняемой операции. В результате электромагнит регулятора давления отключается, и золотник трехпозиционного распределителя посредством пружин занимает нейтральное положение. Выполнение операции прекращается. Жидкость по центральному каналу трехпозиционного распределителя поступает в сливную магистраль 36 и далее через фильтр 58 в бак 30. При этом, пока нажата педаль управления, соответствующий насос работает в режиме разгрузки.
В случае, если температура масла в баке выйдет за пределы допустимой, срабатывает установленный в баке датчик 62 температуры. При этом поступает управляющий сигнал на отключение электропитания электромагнитов регуляторов давления, и проведение всех операций становится невозможным.
Приведение стрелового крана в транспортировочное положение при отказе аксиально-поршневых регулируемых насосов (аварийное свертывание крана) осуществляется следующим образом. Включается автономный двигатель дополнительного насоса 34. Первый трехпозиционный распределитель 48 с ручным управлением переключается в левую позицию. При этом система управления подачи жидкости аксиально-поршневых регулируемых насосов 31 и 32 отключается, и магистраль 53 через первый трехпозиционный распределитель 46 соединяется со сливом. Жидкость от дополнительного насоса 34 через обратный клапан 59 поступает к клапану давления 50, который настроен, например, на давление 3 МПа. Это давление жидкости поступает через включенный первый трехпозиционный распределитель 48 в магистраль 42 и далее в пневмогидроаккумулятор 37 с гидроклапанами. Пневмогидроаккумулятор заряжается до давления 3 мПа, и по магистрали 35 это давление поступает в распределительные блоки 7 и 8 к регуляторах давления 16 - 29, подготавливая последние к работе. Клапан давления 50 предназначен для создания в магистралях 54, 42 и на входе пневмогидроаккумулятора 37 давления не менее 3 МПа независимо от давления в магистралях 55 и 56, питающих исполнительные гидродвигатели при свертывании крана в аварийной ситуации. Поскольку к регуляторам давления распределительных блоков 7 и 8 подано давление управления, а на электромагниты упомянутых регуляторов давления электропитание может быть подано, например, от аккумулятора крана, то при аварийном свертывании крана можно пользоваться манипуляторами распределительных блоков 7 и 8. Для опускания груза посредством грузовой лебедки, а также для опускания стрелы крана второй трехпозиционный распределитель 49 с ручным управлением переключают в левую позицию, и жидкость от дополнительного насоса 34 поступает через обратный клапан 52 в магистраль 56 и далее в распределительный блок 8. Используя рукоятку манипулятора распределительного блока 8, машинист крана осуществляет опускание груза и опускание стрелы крана, как это было описано выше. При этом педали управления не используются. Для втягивания подвижных секций телескопической стрелы и поворота платформы крана в транспортировочное положение второй трехпозиционный распределитель 49 с ручным управлением переключают в правую позицию, и жидкость от дополнительного насоса 34 поступает через обратный клапан 51 в магистраль 55 и далее в распределительный блок 7. Используя рукоятку манипулятора распределительного блока 7, машинист крана осуществляет втягивание подвижных секций телескопической стрелы и поворот платформы крана в транспортировочное положение.
Если при отказе аксиально-поршневых регулируемых насосов 31 и 32 насос управления 33 может функционировать, например, при включении его к внешнему источнику электроэнергии, то насос управления может быть использован для аварийного свертывания крана совместно с дополнительным насосом 34 через включенный первый трехпозиционный распределитель 48. Благодаря этому обеспечивается увеличение скорости исполнительных гидродвигателей, что позволяет сократить время свертывания крана в транспортировочное положение.
Таким образом, благодаря особенности исполнения гидравлического привода стрелового самоходного крана, изобретение обеспечивает возможность увеличения скорости выполнения рабочих операций, когда нет их совмещения, и расширение возможности регулирования скорости выполнения рабочих операций. Кроме того, изобретение позволяет повысить надежность привода благодаря тому, что предусмотрена возможность приведения крана в транспортировочное положение при отказе основных насосов, что особенно важно для железнодорожных кранов, работающих на действующих железнодорожных магистралях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН | 2000 |
|
RU2176615C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2003 |
|
RU2243311C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ ПРИВОДОМ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2179144C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128790C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2115030C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2005 |
|
RU2303174C1 |
Изобретение относится к подъемно-транспортному машиностроению. Гидравлический привод стрелового самоходного крана содержит ограничитель грузового момента, источник питания, гидроцилиндры (3, 4) механизмов выдвижения и подъема стрелы, гидромоторы (1, 5) поворота платформы и грузовой лебедки с тормозами, сообщенные первым распределительным блоком (7) с одним из аксиально-поршневых регулируемых насосов (31) с регулятором мощности и баком. Гидроцилиндры механизмов выдвижения и подъема стрелы, гидромотор грузовой лебедки сообщены вторым распределительным блоком с другим аксиально-поршневым регулируемым насосов (32) с регулятором мощности и баком. В магистрали между насосом управления и полостями управления трехпозиционных распределителей установлен пневмогидроаккумулятор. Распределительные блоки включают регуляторы давления с электромагнитным управлением, связанные с ограничителем грузового момента, и манипуляторы, связанные с соответствующими электромагнитами регуляторов давления каждого распределительного блока. Дополнительный насос (34) с автономным двигателем сообщен с пневмогидроаккумулятором и с распределительными блоками. Изобретение расширяет возможности регулирования скорости рабочих операций. 2 з.п. ф-лы, 1 ил.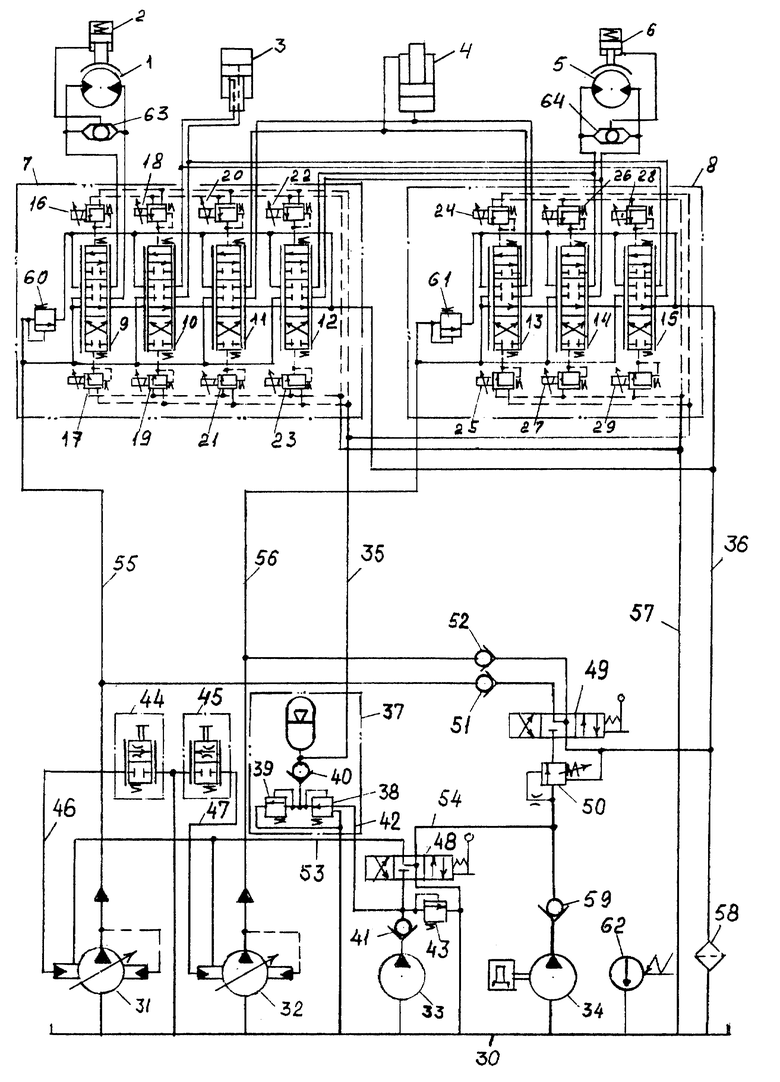
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| GB 1485686 A, 19.09.1977 | |||
| US 5058752 A, 22.10.1991. | |||

