Изобретение относится к весоизмерительной технике.
Известен весовой порционный дозатор, содержащий циферблатный указатель с преобразователем угла поворота стрелки в линейное перемещение, связанный с датчиком перемещения, аналого-цифровой преобразователь, соединенный с арифметическим блоком, подключенным совместно с задатчиком к узлу сравнения l1;
В этом устройстве не обеспечена необходимая точность, поскольку при изменении внешних условий изменяются параметры датчика и других элементов измерительного тракта.
Наиболее близким к предлагаемому по технической сущности является автоматический весовой порционный дозатор с цифровым управлением, содержащий циферблатный указатель с преобразователем угла поворота стрелки в линейное перемещение, индуктивный датчик перемещения, выводы которого через управляемый коммутатор подключены к входу аналогоцифрового преобразователя, соединенного с арифметическим блоком, подключенным совместно с задатчиком к блоку цифрового сравнения, и блок
управления, выходы которого подключены к входам управляемого коммутатора и к арифметическому блоку 2. В этом дозаторе приняты меры для снижения дополнительной погрешности дозирования за счет измерения неизвестной дозы в. несколько тактов совместно со специально сформированными на входе Измерительной систе10мы тестами. Это позволяет получить дополнительную информацию не только об измеряемой величине, но и о текущих значениях параметров функции преобразования измерительной
15 система и исключить эти нестабильные параметры из конечного результата .
Однако данное устройство имеет низкую точность и надежность, так
20 как в нем принята кусочно-параболическая аппроксимация функции преобразования маесодозирующей системы, в связи с чем число тактов измерения, необходимых для определения те25кущего значения дозы, увеличивается до четырех. Это значительно повышает динамическую составляющую погрешности измерения.
Устройство-прототип имеет также
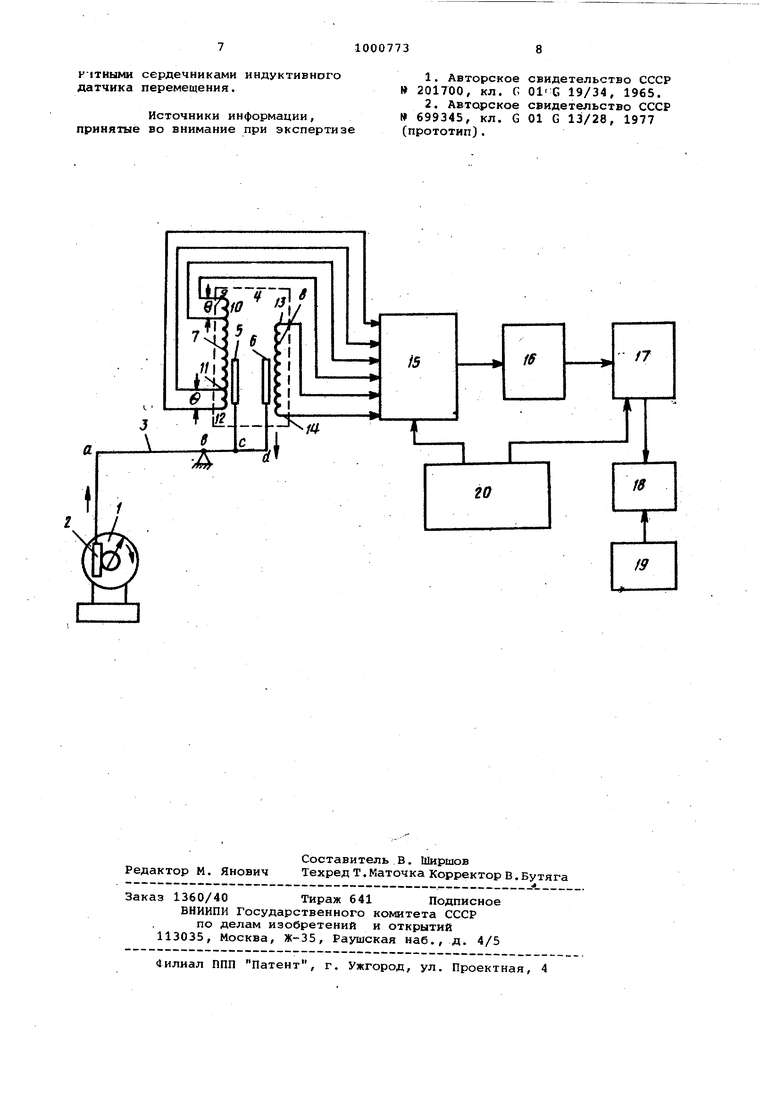
30 значительную погрешность аппроксиьации, так как каиузый i-ый участок функции преобразования, аппроксими отрезком параболы, не может быть меньше 5& , где в- - длина от дельной секции катушки индуктивног датчика. Уменьшение длины В с цель (снижения погрешности аппроксимации шедет к увеличению общего числа п секций обмотки, что значительно усло няет технологию изготовления датчика с большим числом идентичных одна другой секций. Это,в свою очередь, приводит к тому, что в отдельных тактах измерения участвуют отличающиеся по своим параметрам один от другого индуктивные преобразователи что ведет к снижению точности дозирования за счет возрастания погрешности неидентичности. Цель изобретения - повышейие точ ности за счет уменьшения погрешнос ти аппроксимации измерительной функ ции. Указанная цель достигается тем, что индуктивный датчик перемещения выполнен -в виде двух соленоидных катушек с ферромагнитными сердечниками , первая из которых исполнена из основной и двух расположенных по ее краям идентичных вспомогатель ных секций, а вторая катушка исполнена из одной секции, идентичной основной и одной вспомогательной секциям первой катушки, причем в дозатор введен рычаг, одно плечо которого соединенос преобразователем угла поворота стрелки в линей- ное перемещение, а другое - на разных расстояниях от опоры рычага сое динено с ферромагнитными сердечниками индуктивного датчика перемещения. . На чертеже показана схема дозатора. Дозатор содержит циферблатный указатель 1 с преобразователем 2 угла поворота стрелки в лииейиое перемещение, соедииеиный с левым плечом рычага 3, индуктивный датчик 4, ферромагнитные сердечники 5 и б которого соединены с правьш плечом рычага 3. Датчик 4 содержит две соленоидные катушки 7 и 8, причем катушка 7, имеющгш выводы 9-12, содержит три секции основную и две идентичные вспомогательные, расположенные по ее краям. Катушка 8, имеющая выводы .13 и 14, содержит сздиу секцию, идентичную основной и одной вспомогательной секциям катуш ки 7. Выводы катушек 7 и 8 подключены к входу управляемого коммутатора 15, выход которого подключен к вход аналого-цифрового Преобразо вателя (АЦП) 16. Ка выходе АЦП 16 включен арифметический блок 17, выход которого соединен с одним из входов блока 18 цифрового сравнения, к второму ВХОД которого подключен эадатчик 19. К управляющему коммутатору 15 и к входу арифметического блока. 17 подключены выводы блока 20 управления. Предлагаемый дозатор работает следующим образом. При поступлении дозируемого материала в грузоприемный бункер (не показан) стрелка циферблатного указателя 1 отклоняется на угол с , пропорциональный текущему значению массы Р. Имеем oL f(Р). Угол ct с помсмцью преобразователя 2 преобразуется в линейное перемещение X . ,(°) вследствие чего происходит изменение индуктивности датчика 4 в функции перемещения L fJ (х)t С помощью АЦП 16 осущестВ ляется преобразование L в цифровой код N N f (L). Таким образом, величина кода на выходе АЦП функцирнально связана с значением массы Р дозируемого материала в грузо:приемном бункере N N(P). Если преобразования PgoL и Л.Ьл осуществляются по линейному закону, то все последующие преобразования являются нелинейными. Вследствие , этого функция преобразования измерительного тракта дозатора, также нелинейна. Принцип действия Предлагаемого дозатора основан на том, что его функция преобразования с достаточной точностью может быть представлена некоторым числом отрезков пря- . тих. вида: аР b , i « 1,2,. ..n. п - число отрезков аппроксимации, Р - измеряемая доза; а, в - коэффициенты функции преобразования, определяемые физическими параметрами массоизмерительной систекЕл и являющиеся случайными функциями времени. Изменение коэффициентов а и b под влиянием внешних факторов, а также вследствие временного дрейфа параметров самойзмерительной системы являются источниками погрешностей измерения дозы. Для исключения влияния нестабильности указанных коэффициентов, а также из значений на точность дозиования проводите три такта изерения дозы, в процессе которых к входу АЦП 16 с помощью управляеого коммутатора 15 в любой после-. овательности подключаются следующие пары выводов катушек 7 и 8: выводы 9 и 11,10 и 12, 13 и 14.
В исходном состоянии при Р 0 I сердечники 5 и 6 устанавливаются в одинаковые положения соответственно относительно катушек 7и 8. В процессе дозирования при пост плении материала в грузоприемный Сумкер сердечники начинают смещаться в направлении, указанном на фиг. 1 стрелкой. При смещении преобразователя 2 на расстояние х сердечник 7 смещается На расстояние if., . а сердечник 8 - на расстояние K-i X, При этом подключение к входу АЦП 16 выводов 10 и 12 катушки 7 вместо 9 и 11 соответствует смещению сердечника 5 относительно этой катушки на расстояние 9, равное длине вспомогательной секции. Таким образом, электрические сигналы на выходе АЦП 16 связаны с пермещением соответственно зависимоетями
а1ц X + Ь ,
N.
N a(k,x в) +Ь-, ,
N5 akix + о ,25
где к и к. постоянные коэффициенты передачи рычага:
Ъа ..,
.NI-N, .
R--где
KI-K,
Учитывая линейную зависимость между х и р для текущего значения маесы Р имеем
.. где 1 - коэффициент пропорциональf ности, определяек«й параметрами только механических узлов циферблатного указателя. Таким образом,
«1-V. .
Вычисление веса осуществляются арнф метическим блоксм 17.
Как видно из формулы нестабильные параметры а и Ь измерител| исД системы не входят в конечное выражение для Р и таким образом их нестабильность не снижает точность измерения дозы. Это позволяет повысить точность дозирования за счет исключеиия как мультипликативной составляющей погрешности, определяемой коэффициентом а, так и адди нвной составляющей погрешюсти, определяемой коэффициентом Ь. Точность дозирования за1висит только от стабильности параметров (7 и к, которые могут быть выполнены с требуемой для практики степенью точности
Абсолютные значения & и к выбираются из условия минимума погрешности кусочно-линейной аппроксимации функции преобразования массойзмерительной системы.
Сигнал, пропорциональный рассчитанному текущему значению дозы, поступает на один из входов блока 18 цифрового сравнения, на второй вход которого подается сигнал, пропорциональный заданной Дозе в задатчике 19. При равенстве сигналов на обоих входах.блока 18 с его выхода поступает сигнал на закрытие впускного затвора расходного бункера (не показан) ,
Изготовлен опытный образец пред-лагаемого дозатора и проведены его лабораторные испытания, подтверждающие его эффективность и возможность обеспечения высокой точности дозирования в широком диапазоне изменения внешних условий.
Экономический эффект от использования изобретения обусловлен повьииением точности дозирования.
30
Формула изобретения
Автоматический весовой порционный дозатор с цифровым управлением, содержащий циферблатный указатель с
5 преобразователем угла поворота стрелки в линейное перемещение, индуктивный датчик перемещеният выводы которого через управляемый коммутатор подключены к входу аналого-цифрово0го преобразователя, соединенного с ари4метическим блоком, подключенным совместно с задатчиком к блоку циф.рового сравнения,и блок управления, выходы которого подключены к входам
5 управляемого коммутатора и к арифметическому блоку, отличающийся тем, что, с целью повышения точности заснет уменьшения погрешности аппроксимации измери
0 тельной функции, в нем индуктивный датчик перемещения выполнен в виде двух соленоидных катушек с ферромагнитными сердечниками,первая из которых выполнена из основной и
5 двух расположенных по ее кра)1М идентичных вспомогательных секций, а вторая катушка выполнена из одной секции, идентичной основной и одной вспомогательной секциям первой ка0тушки, причем в дозатор введен рачаг, одно плечо которого соединено с преобраэователем угла поворота стрелки в линейное перемещение, а другое - на разных расстояниях от опоры рычага соединено с ферромаг5
Н-1ТНЫМИ сердечниками индуктивного датчика перемещения.
Источники информации, принятые во внимание при экспертизе
свидетельство СССР 01G 19/34, 1965.
свидетельство СССР 01 G 13/28, 1977 
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический порционный дозатор с цифровым управлением | 1987 |
|
SU1439410A1 |
| Автоматический порционный дозатор | 1988 |
|
SU1534330A1 |
| Автоматический весовой порционный дозатор | 1977 |
|
SU699345A1 |
| Автоматический порционный дозатор с цифровым управлением | 1982 |
|
SU1052878A1 |
| Весовой порционный дозатор с цифровым управлением | 1977 |
|
SU684327A1 |
| Весовой порционный дозатор с цифровым управлением | 1989 |
|
SU1688124A1 |
| Преобразователь перемещения в код | 1985 |
|
SU1279065A1 |
| ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU340892A1 |
| Устройство для контроля работы дозирующего оборудования | 1985 |
|
SU1287212A1 |
| Датчик линейных перемещений | 1988 |
|
SU1580148A1 |
