т/
Sj $5
AJ7 уаКрУ1тив samoaaa
Изобретение относится к весоизмерительной технике и может быть использовано для высокоточного дози- рования различных материалов, например составляющих бетонной смеси, шихты и дро
Цель изобретения - повьшение точности дозирования.
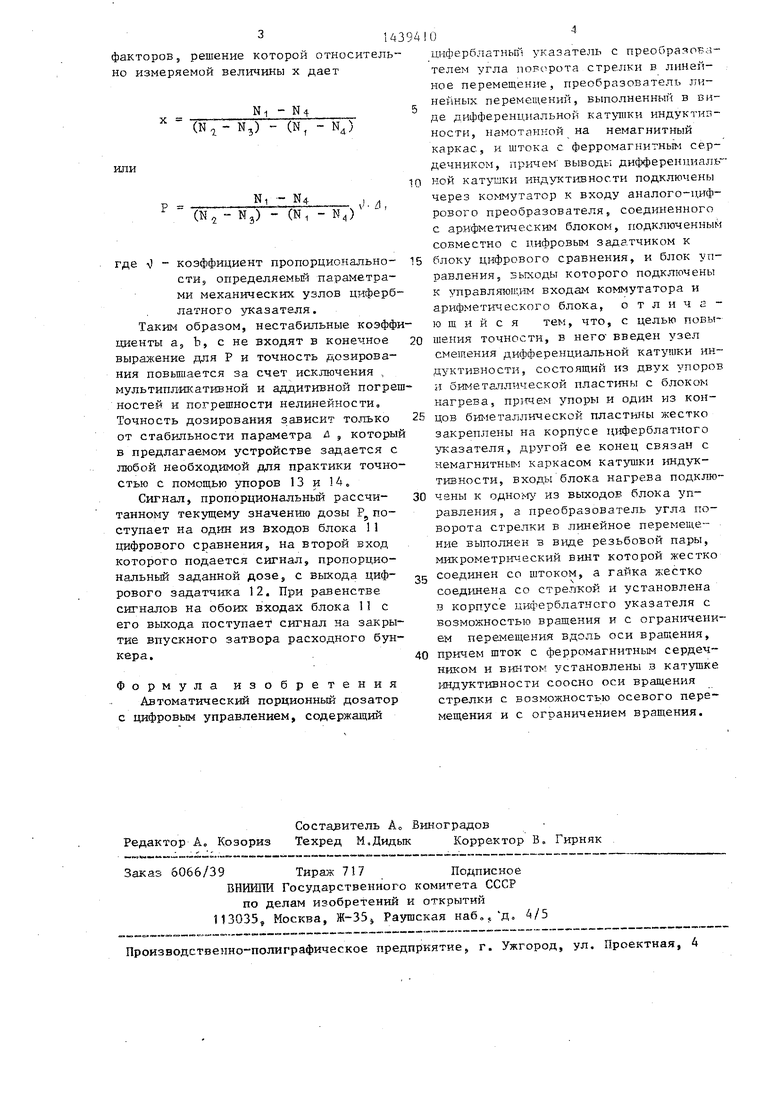
На чертеже представлена структур- нал схема дозатора.
Дозатор соде,ржит циферблатный указатель, имеющий корпус 1 и снабженный преобразователем угла поворота стрелки в линейное перемещение, со- держащим резьбовую пару из- гайки 2, жестко закрепленной на стрелке цифрового указателя и микрометрического винта 3, соединенного с ограничением вращения со штоком 4 преобразователя линейных перемещений в электрический сигнал. Последний содержит дифферен- циальную катушку 5 индуктивности, намотанную на немагнитный каркас 6, и ферромагнитнь й сердечник 7, закреп ленный на штоке 4, Кроме того, в дозатор входят коммутатор 8, аналого- цифровой преобразователь (АЦП) 9,, арифметический блок 10, блок П цифрового сравнения, цифровой задатчик 12, узел смещения дифференциальной катушки, вьшолненный в виде упоров 13 и 4 и биметаллической пластины 15, блок 16 нагрева и блок 17 управления ,
Дозатор работает следующим образом,
В исходном состоянии под действием биметаллической пластины 15 катушка 5 индуктивности фиксируется в крайнем верхнем положении, определяемом упором 13. Материалы бнметалчпи- ческой пластины, ее форма и геометрические размеры выбираются такими, чтобы положение катушки надежно обе- спечивалось при любых изменениях температуры среды, которые могут иметь место в .процессе эксплуатации в до- заторном отделении. В начальном положении при Р О сердечних 7 устанав- ливается в положение х, симметричное относительно секций 5„ При поступлении дозируемого материала в грузоприемньй бункер стрелка циферблатного указателя отклоняется на угол 0 ., пропорциональный текуа1ему значению массы f,(P). Угол d преобразуется в ли 1ейное перемещение X fi(t)() вследствие чего происходи
-14394102
изменение индуктивности L-каждой из ., секций датчика в функции перемещения
5 0 с
0 g е
L з(х),
За положительное условно принято направление движения сердечника по стрелке на чертеже.
Измерение массы Р осуществляется в четыре такта. Первые два такта проводятся в положении катушки 5 индуктивности, определяемом упором 13, В первом такте по сигналу с блока 17 управления к входу АЦП 9 через коммутатор 8 подключается нижняя секция дифференциальной катушки 5, Выходной электрический сигнал N , пропорционален величине х - х. Во втором такте к входу АЦП 9 подключается верхняя секция дифференциальной катушки 5, Выходной электрический сигнал N пропорционален величине х + х.
По окончании второго такта измерения по сигналу с блока 17 управления включается блок 16 нагрева, вследствие чего катушка 5 индуктивности под действием биметаллической пластины 15 устанавливается в крайнее нижнее положение, определяемое упором 14. В этом цоложении проводятся третий и четвертый такты измерения.
В третьем такте к АЦП подключается нижняя секция дифференциальной катушки. Выходной электрический сигнал Nj пропорционален величине х р - х - где л известное расстояние, на которое смещается катушка. В четвертом такте к АДП подключается верхняя секция дифференциальной катушки. Выходной сигнал пропорционален величине х о + х + .
В результате четырех тактов получается система уравнений
N ) -f ЪСхд-х) + С5 N а(Хо-(-х) + Ь(Хо+х) + с;
N3 а(Х(,)ч- Ь(Хо-х-/1) + с;
N
(х. )+ Ь(хр+х4-Л) + с.
где а, Ь, с - коэффициенты функции преобразования5 определяемые физическими параметрами весоизмерительной системы и являющиеся случайными функциями времени и дестабилизирующих
314394
факторов, решение которой относительно измеряемой величины х дает
X
Ni - N4
( N,) - (N - N4)
или
р
N4
(N - N3) - (N, - N4)
15
где -О - коэффициент пропорциональности j определяемый параметрами механических узлов циферблатного указателя.
Таким образом, нестабильные коэффициенты аэ Ъ, с не входят в конечное 20 выражение для Р и точность дозирования повьшается за счет исключения , мультипликативной и аддитивной погрешностей и погрешности нелинейности. Точность дозирования зависит только от стабильности параметра и , который в предлагаемом устройстве задается с любой необходимой для практики точностью с помощью упоров 13 и 14„
Сигнал, пропорциональньй рассчи25
30
тайному текущему значению дозы Р, поступает на один из входов блока 11 цифрового сравнения5 на второй вход которого подается сигнал, пропорциональньй заданной дозе, с выхода цифрового задатчика 12. При равенстве сигналов на обоих входах блока 11 с его выхода поступает сигнал на закрытие впускного затвора расходного бункера.
Формула изобретения Автоматический порционный дозатор с цифровым управлением, содержащий
394
10
15
2025
30
35
40
О
щ-гферблатньй указатель с преобраяов; - телем угла поворота стрелки в линейное перемещение, преобразователь линейных перемещений, выполненный в виде дифференциальной катушки индуктивности, намотанкой на немагнитный каркас, и штока с ферромагнитным сердечником, причем выводы дифференциалк ной катушки индукт1-шности подключены через коммутатор к входу аналого-п,иф- рового преобразователяS соединенного с арифметическим блоком, подключенный совместно с цифровым задатчиком к блоку цифрового сравнения, и блок управления, выходы которого подключены к шравляюш,11М входам кoм 5yтaтopa и арифметического блока, отличающийся тем, что, с целью повышения точности, в него введен узел смещения дифференциальной катушки ин дук;тивности, состоящий нз двух упоров н бшшталлической пластины с блоком нагрева, причем упоры и один из концов биметаллической пластины жестко закреплены на корпусе циферблатного указателя, другой ее конец связан с немагнитньм каркасом катушки индуктивности, входы блока нагрева подключены к одному из выходов блока управления, а преобразователь угла поворота стрелки в линейное перемещение выполнен в виде резьбовой пары, микрометрический винт которой жестко соединен со штоком, а гайка жестко соединена со стрелкой и установлена в корпусе циферблатного указателя с возможностью вращения и с ограничением перемещения вдоль оси вращения, причем шток с ферромагнитным сердечником и винтом установлены з катушке -авдуктивности соосно оси вращения стрелки с возможностью осевого перемещения и с ограничением вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический весовой порционный дозатор с цифровым управлением | 1981 |
|
SU1000773A1 |
| Автоматический порционный дозатор | 1988 |
|
SU1534330A1 |
| Датчик линейных перемещений | 1988 |
|
SU1580148A1 |
| Автоматический весовой порционный дозатор | 1977 |
|
SU699345A1 |
| Устройство для измерения перемещений и температуры | 1981 |
|
SU991141A1 |
| Весовой порционный дозатор с цифровым управлением | 1989 |
|
SU1688124A1 |
| Электронная микробюретка | 1977 |
|
SU691752A1 |
| Весовой порционный дозатор с цифровым управлением | 1977 |
|
SU684327A1 |
| Преобразователь перемещения в код | 1985 |
|
SU1279065A1 |
| Датчик линейных перемещений | 1991 |
|
SU1820196A1 |
.Изобретение относится к массо- измерительной технике и позволяет повысить точность дозирования материалов за счет исключения влияния погрешностей, вносимых нестабильными физическими параметрами весоизмерительной системы. Измерение осуществляется за четыре такта работы блока 17 управления. Первые два такта соответствуют такому положению катушки 5 индуктивности, намотанной на немагнитный каркас 6, которое определяется упором 13. В первом и третьем тактах к входу аналого-цифрового преобразователя 9 через коммутатор 8 подключается нижняя секция катушки 5, во втором и четвертом - верхняя секция. Перед третьим и четвертым тактами путем нагревания биметаллической пластины 15 блоком 16 нагрева катушка 5 переводится в положение, определяемое упором 14. Шток 4 с ферромагнитным сердечником 7 перемещается внутри катушки 5 под действием вращения микрометрического винта 3 внутри гайки 2, жестко связанной со стрелкой циферблатного указателя. По результатам измерений в четырех тактах арифметический блок 10 вычисляет значение массы дозы, которое сравнивается в блоке 11 цифрового сравнения с заданной величиной, определяемой цифровым задатчиком 12, и при их совпадении закрывается затвор дозирующего бункера. 1 ил. § сл СА9
| Автоматический весовой порционный дозатор | 1977 |
|
SU699345A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматический весовой порционный дозатор с цифровым управлением | 1981 |
|
SU1000773A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
