Изобретение относится к системам автоматического контроля и регулирования.
Известные частотные преобразователи перемещений, содержащие индуктивный датчик, выполненный в виде соленоида, обмотка которого включена в контур генератора с самовозбуждением, и блок обработки сигнала, не обеспечивают точность работы.
В предлагаемом устройстве, с целью повышения точности работы преобразователя, установлен управляемый коммутатор, входы которого подключены к выводам обмотки датчика, а выход - к контуру генератора.
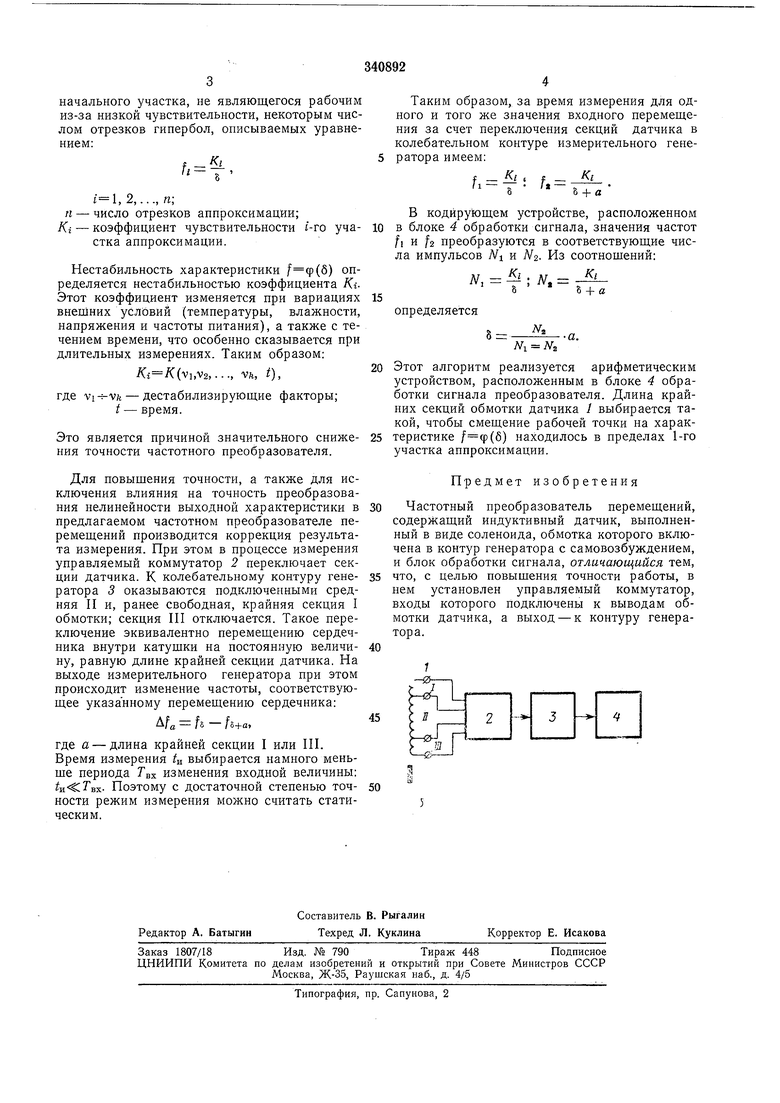
На чертеже представлена блок-схема предлагаемого преобразователя.
Схема содержит индуктивный датчик 1, управляемый коммутатор 2, генератор 3 и блок 4 обработки сигнала.
Индуктивный датчик / выполнен в виде соленоида, разделенного на три последовательно соединенные секции I, II и III, из которых две крайние (I и III) идентичны. Выводы секций подключены через управляемый коммутатор 2 к задающему контуру генератора 3 с самовозбуждением.
чины, смещающей сердечник относительно катущки. Происходит преобразование:
(б),
где б - перемещение;
L - индуктивность обмотки.
На выходе генератора 3 получаем:
/ Ф2(Ь),
10
где f - частота.
К колебательному контуру генератора 3 всегда подключены две из трех последовательпо соединенных между собой секций обмотки датчика /: средняя и одна из крайних (например II и III). Таким образом, одна крайняя секция всегда свободна и не влияет на индукти вность датчика / и на значение выходной
частоты генератора 3.
Некоторому положению сердечника соответствуют определенные значения индуктивности, частоты и числа импульсов на выходе кодирующего устройства, расположенного в блоке 4 обработки сигнала 1. Зависимость частоты от перемещения при использовании соленоидальных датчиков с открытой магнитной ценью и цилиндрическим ферромагнитным сердечником может быть аппроксимирована
начального участка, не являющегося рабочим из-за низкой чувствительности, некоторым числом отрезков гипербол, описываемых уравнением:
f Ki
, 2,..., п;
п - число отрезков аппроксимации; Кг - коэффициент чувствительности 1-го участка аппроксимации.
Нестабильность характеристики (б) определяется нестабильностью коэффициента KiЭтот коэффициент изменяется при вариациях внешних условий (температуры, влажности, напряжения и частоты питания), а также с течением времени, что особенно сказывается при длительных измерениях. Таким образом;
(v:,V2,..., Vh, t),
где - дестабилизирующие факторы; t - время.
Это является причиной значительного снижения точности частотного преобразователя.
Таким образом, за время измерения для одного и того же значения входного перемещения за счет переключения секций датчика в колебательном контуре измерительного генератора имеем:
f - f -
Ki i - ,, /« -
+ а
В кодирующем устройстве, расположенном в блоке 4 обработки сигнала, значения частот /1 и f2 преобразуются в соответствующие числа импульсов NI и . Из соотношений:
N, lN,
KI
S + а
определяется
S
а.
Этот алгоритм реализуется арифметическим устройством, расположенным в блоке 4 обработки сигнала преобразователя. Длина крайних секций обмотки датчика / выбирается такой, чтобы смещение рабочей точки на характеристике (6) находилось в пределах 1-го участка аппроксимации.
Для повышения точности, а также для исключения влияния на точность преобразования нелинейности выходной характеристики в предлагаемом частотном преобразователе перемещений производится коррекция результата измерения. При этом в процессе измерения управляемый коммутатор 2 переключает секции датчика. К колебательному контуру генератора 5 оказываются подключенными средняя II и, ранее свободная, крайняя секция I обмотки; секция III отключается. Такое переключение эквивалентно перемещению сердечника внутри катушки на постоянную величину, равную длине крайней секции датчика. На выходе измерительного генератора при этом происходит изменение частоты, соответствующее указанному перемещению сердечника:
Д/а f 5 - /5+а,
где а - длина крайней секции I или 1П. Время измерения 4i выбирается намного меньше периода Гвх изменения входной величины: иСТвх. Поэтому с достаточной степенью точности режим измерения можно считать статическим.
Предмет изобретения
Частотный преобразователь перемещений, содержащий индуктивный датчик, выполненный в виде соленоида, обмотка которого включена в контур генератора с самовозбуждением, и блок обработки сигнала, отличающийся тем, что, с целью повышения точности работы, в нем установлен управляемый коммутатор, входы которого подключены к выводам обмотки датчика, а выход - к контуру генератора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ И ВЯЗКОСТИ ЖИДКОСТИ В СКВАЖИНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2284500C2 |
| Двухканальный пропорционально-дифференциальный феррозонд | 2023 |
|
RU2817510C1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНО-РЕЗОНАНСНОЙ ИМПЕДАНСОМЕТРИИ ЖИВЫХ ТКАНЕЙ БИОЛОГИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2182814C2 |
| Датчик подачи жидкости для нефтяных скважин | 1982 |
|
SU1044778A1 |
| Устройство для диагностики состояния процесса резания | 1983 |
|
SU1122476A1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ БИОЛОГИЧЕСКОЙ ТКАНИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251969C2 |
| Дистанционный датчик линейных перемещений | 1988 |
|
SU1627819A1 |
| Устройство для измерения линейных перемещений | 1980 |
|
SU949329A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU388289A1 |
