Изобретение относится к автсялатиэации средств контроля и измерения и может быть использовано в преобразователях линейного перемещения или угла поворота вала в код в качестве промежуточного звена между чувствительными элементами (лaтчикa и перемещения) и результирующим счетчиком импульсов.
В преобразователях угол-код поворот входной оси можно условно разбить на единичные приращения, на появления которых реагируют чувствительные элементы преобразователя, вырабатывающие сигналы, которые суммируются на счетчике, обеспечивая тем Сс1мым информацию о суммарном повороте входной оси от некоторого Ha4aj:bного положения. Поскольку входная ось преобразователя угол-код может поворачиваться как по, так и против часовой стрелки, то для получения правильного значения полного угла поворота сигналы чувствительного элемента должны суммироваться с учетом направления перемещения, а значит, при изменениях направления движения входной оси преобразователя уголкод счетчик должен переключаться со сложения на вычитание и наоборот.
т.е. должен работать в реверсивном режиме t1i.
Известен преобразователь перемещения в код, содержащий задающий эле-;. .мент, два чувствительных элемента, инвертор, два элемента И и блок задержки 2.
Недостатком такого преобразователя является наличие блока задержки, который формирует Ш 1пульс определенной длительности, тем самым накладывая жесткие ограничения на скорость перемещения задающего элемента, т.е. на режим работы всего преобразователя переметцений в код в целом.
Наиболее близким к предлагаемому по функциональным возможностям и технической сущности является схема преобразования перемещения в дискретный сигнал, содержащая два элемента НЕ-И, два инвертора и четыре дифференцирукицих цепочки З. .
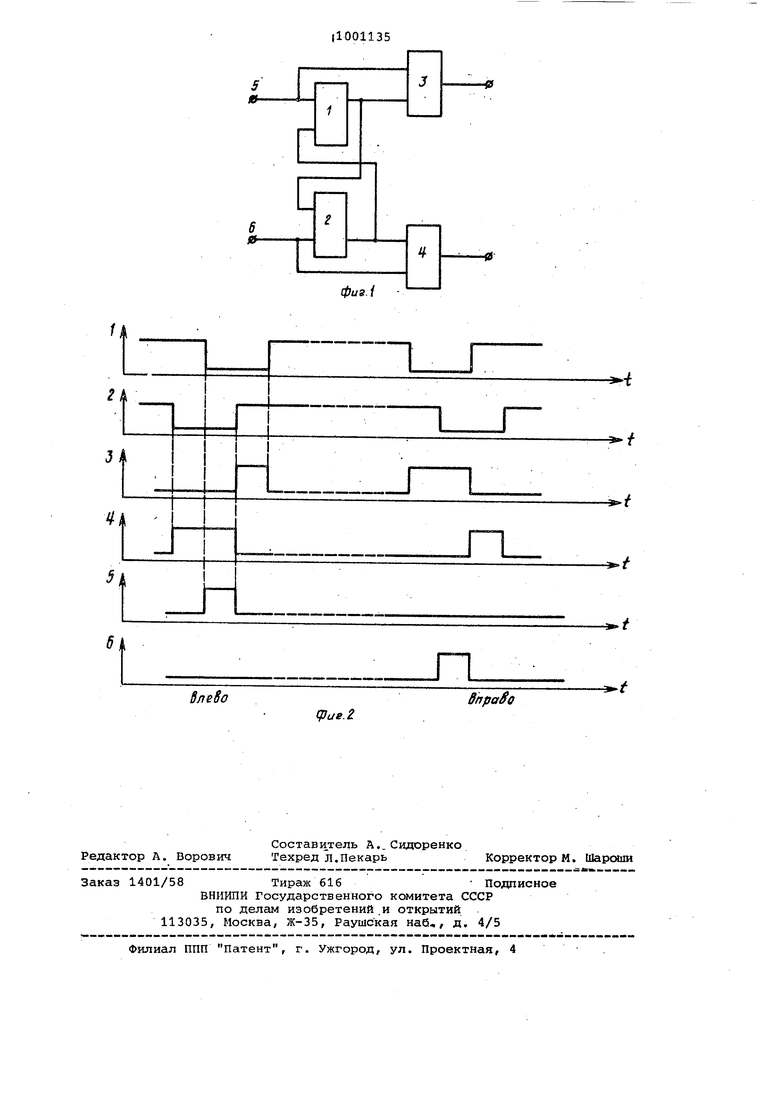
На вход устройства преобразования :поступают от двух датчиков переме25 щения импульсы (меандр), сдвинутые относительно друг друга на угол Л/2, Период следования импульсов соответствует величине механйческого перемещения, а знак разности фаз Л/2 со30 ответствует направлению перемещения. Сигналы направления от датчиков подаются на один из входов схем НЕ-И, в то время как вторые входы крестообразно (перекрестно) связаны с выходами этих схем. Разность фаз 5Г/2 входйых сигналов вьщеляется на схемах совпадения указанных схем ПЕ-И и в зависимости от направления перемещения (знака разности фаз Я/2) появляется на выходах схем НЕ-И в в де прямоугольных импульсов длительйостью JF/2, С помощью первого (второго) инвертора достигается совпадение по времени отрицательных перепадов напряжения на входе дифференцирующих цепочек Д и Д .(Д и Д Недостатком данного преобразователя является низкая точность преобразования в условиях неравномерно скорости перемещения задающего элемента, определяемая наличием дифференцирующих цепочек, которые накладывают ограничения на скорость перемещения задающего элемента (так ж как в аналогах). Этот недостаток имеет две стороны. Во-первых, это ограничения на максимальную скорость перемещения задающего элемента, поскольку длительность импульсов на выходах дифференцирующих цепочек должна быть меньше четверти периода последовательности импульсов с выходов датчиков перемещения. Во-вторых, наличие дифференцирующих цепочек накладывает ограничения на минимальную скорость перемещения за дающего элемента, поскольку при малой крутизне сигналов с выходов дат чиков перемещения сигналы на выходах дифференцирующих цепочек могут |быть недостаточны для срабатывания последующих узлов (счетчиков). Этот недостаток особенно важен в случае, если угол поворота вала задается вручную (например при ручном отслеживании входной величины). Тогда ск рость перемещения задающего элемент неравномерна и преобразование угла поворота вала в код осуществляется с ошибками, т.е. недостаточно точно Кроме того, значительное количество логических элементов (элементы НЕ-И инверторы, дифференцирующ 1е цепочки усложняет схему преобразователя. Цель изобретения - упрощение пре образователя перемещения в код и по вышение точности преобразования. Дл достижения поставленной цели в преобразователь перемещения в код, содержащий первый и второй элементы НЕ-И, первые в5соды которых соединены с первым и вторым датчиками перемещения соответственно, выход пер вого элемента НЕ-И соединен с вторы входом второго элемента НЕ-И, выход которого соединен с входом первого .элемента НЕ-И, введены третий и чет вертый элементы НЕ-И, первые входы которых соединены соответственно с выходами первого и второго элементов НЕ-И, входы которых объединены соответственно с вторыми входами третьего и четвертого элементов НЕ-И, вы.ходы которых являются выходами преобразователя перемещения в код. На фиг. 1 изображена схема преобразователя перемещения в дискретный сигнал; на фиг. 2 - временная диагpaNwa работы преобразователя. Преобразователь перемещения в код содержит логические элементы ПЕ-И 1-4. Вход 5 устройства соединенный с выходом датчика перемещения 1не показан) , подключен к первому входу элемента НЕ-И 3 и первому входу элемента НЕ-И 1. Вход б устройства, соединенный с другим датчиком перемещения, подключен к первыг/i входам элементов НЕ-И 2 и 4. Вторые входы элементов НЕ-И 1 и 2 соединены с выходами элементов НЕ-И 2 и 1 и с вторыми входами элементов НЕ-И 4 и 3 соответственно. Устройство работает следующим образом. Например, сигналы с выходов датчиков перемещения равны 1 (фиг. 2), где 1 - сигналы на входе 5 устройства; 2- сигналы на входе б устройства, 3 - сигнал на выходе элемента НЕ-И 1; 4 - сигнал на выходе элемента НЕ-И 2; 5 - сигнал на первом выходе устройства; 6 - сигнал на втором выходе устройства. В этом случае сигналы на выходах элементов НЕ-И 3 и 4 равны О, поскольку функционирование каждого из элементов НЕ-И 1-4 описы-.вается следую1аим выражением Z X у, где Z - сигнал на выходе элемента X,у- сигналы на входах элементов НЕ-И. При комбинации входных сигналов Ьх,, 1 , Ьх 2 О сигналы на выходах не меняются, они равны 0. При комбинации входных сигналов Ьх сигнал на первом выходе равен 1, сиг нал на втором выходе не меняется (равен 0). При комбинации входных сигналов by. 0, byg 1 сигналы на обоих выходах равны О и т.д. Все время, пока задающий элемент поворачивается влево (против часовой стрелки) , сигнал на первом выходе изменяется, а на втором - постоянен и равен 0. Посчитав количество импульсов на первом выходе, можно определить перемещение задающего элемента влево (против часовой стрелки), Длительность в.ыходных импульсов на Первом выходе определяется только скоростью перемещения задающего элемента, и при скважности, равной 2, скважност выходных сигналов равна 4. При реверсе задающего элемента, т.е. при движении вправо (по часовой стрелке последовательность сигналов на вход устройства меняется (фиг. 2) и меняется вид выходных сигналов в соот ветствии с таблицей. Как видно из фиг. 2 и таблицы, сигнал на первом выходе не изменяется/ а на втором - изменяется. Подсчи тав количество импульсов на втором входе, можно определить перемещения задающего элемента вправо (по часовой стрелке), Подсчитав разность количеств импульсов на первом и вторсян выходах, можно определить суммарное перемещение задающего элемента (и направление, и величину перемещения). Особенностью работы предлагаемого устройства является отсутствие явления состязания и неустойчивого выходного состояния элементов НЕ-Ц 1 и 2 (которые внешне похожи на R- 3 триггер). Кроме того, при одинаковых входных сигналах сигналы на выходах устройства различны при перемещениях задающего элемента в различных напра лениях (так, например, при перемещении задающего элемента влево и при входных сигналах, равных О, сигнал на первом вЕлходе равен 1, на вторсм выходе - О, а при перемещении задающего элемента вправо и при тех же входных сигналах выходные сигналы противоположны). Первые два элемента НЕ-И представляют подобие Порядково схемы и обеспечивают выработку различных последовательностей сигналов при различных перемещениях задающего элемента. Вместо элементов НЕ-И могут быть использованы элементы И-НЕ. В этом случае изменяются только временные диаграммы работы устройства.Технико-экономический эффект пред лагаемого устройства по сравнению с известными заключается, во-первых, в упрощении схемы преобразователя. Пре лагаемое устройство содержит четыре логических элемента НЕ-И (И-НЕ), которые могут быть реализованы на одном корпусе интеграторной микросхемы 155 серии, в то время как прототип содержит большее количество элементов. Во-вторых, в предлагаемом устройстве повышается точность обработки входных сигналов в условиях неравномерного задающего элемента за счет отсутствия каких-либо элементов с временными зависимостями (блок задержки, дифференцирующие цепочки), тогда как известные устройства должны иметь скорость перемещения задающего элемента в определенных пределах. В качестве базового объекта принят преобразователь , cepHfiHO выпускаемый в ПНР 4J. Предлагаемое устройство по сравнению с базогыг объектом проще за счет, того, что оно содержит только четыре логических элемента НЕ-И, а базовый объект содержит 4 дифференцирующих цепочки,О элементов И, 2 элемента НЕ-ИЛИ, R5 -триггер и более точно обрабатывает сигналы о перемещении задающего элемента, так как скважность выходных сигналов не зависит от скорости перемещения задающего элемента, тогда как в базовом объекте наличие дифференцирукнцих цепочек (также, как в прототипе) , ограничивает (сверху и снизу) скорость перемещения задающего эле.мента. Формула изобретения Преобразователь перемеще.ния в код, содержащий первый и второй элементы НЕ-И, первые входы которых соединены с первым и вторым датчикамиперемещения соответственно, выход первого элемента НЕ-И соединен с вторь входом второго элемента ПЕ-И, выход которого соединен с вторым входом первого элемента НЕ-И, отличающийся тем, что, с целью упрощения и повышения точности преобразователя, в него введены третий и четвертый элементы НЕ-И, первые входы которых соединены соответственно с выходамк первого и второго элементов НЕ-И, входы которых объединены соответственно с вторыми входами третьего и четвертого элементов НЕ-И, выходы которых являются выходами преобразователя перемещения в код. Источники информации, принятые во внимание при экспертизе 1.Гитис Е.И, Преобразователи информации для электронных цифровых вычислительных устрорТств, Изд. 2-е, М., Энергия, 1970, с. 246. 2.Авторское свидетельство СССР 550662, кл.-G 08 С 9/00, 1975. 3.Патент Японии 1 53-11860, кл. 105А 221, опублик. 1978 (прототип) 4.Схема. для определения направления вращения в частоту импульсов. Испытательные приборы и стенды, М., 1979, 34, с. 1-3.
8ле8о
Срие.г
Вправо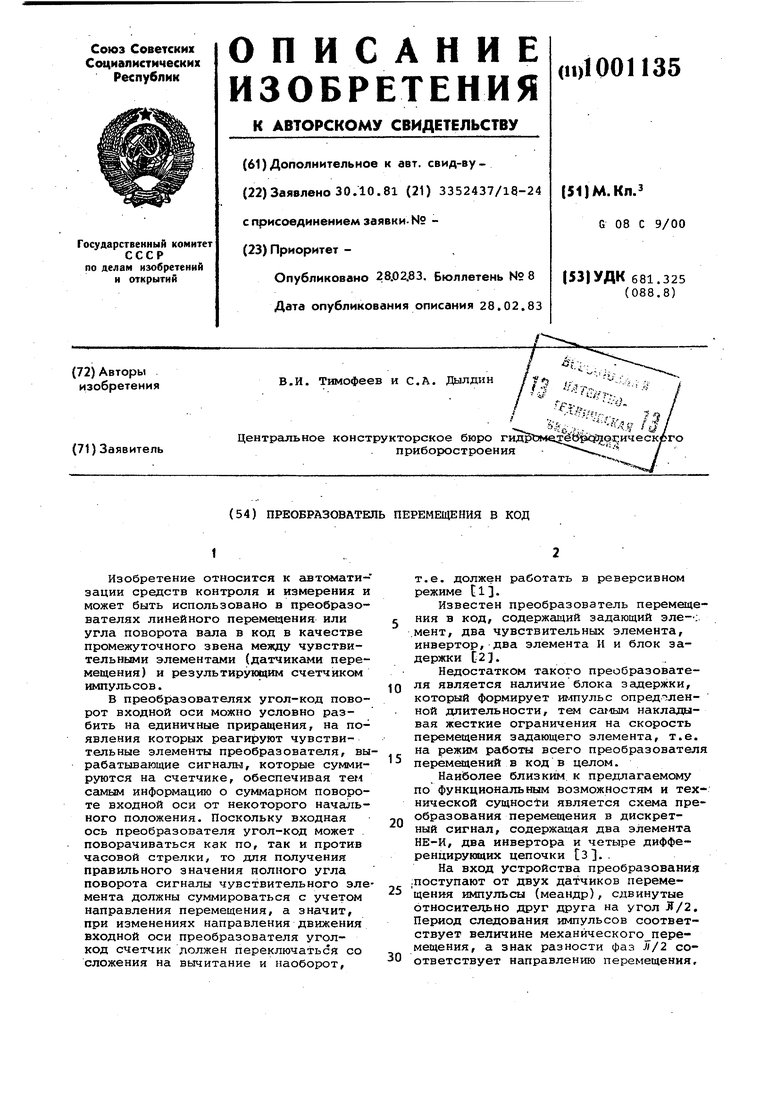
| название | год | авторы | номер документа |
|---|---|---|---|
| Адресующее устройство | 1975 |
|
SU658050A1 |
| Вентильный электродвигатель | 1973 |
|
SU660158A1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU642755A1 |
| Вентильный электродвигатель | 1982 |
|
SU1051661A2 |
| Устройство для отображения информации | 1982 |
|
SU1064292A1 |
| Задающее устройство следящего электропривода | 1982 |
|
SU1056129A1 |
| Вентильный электродвигатель | 1984 |
|
SU1272413A2 |
| Панорамный измеритель частоты | 1984 |
|
SU1267273A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 1997 |
|
RU2110890C1 |
| Способ защиты от обрыва фазы асинхронного электродвигателя и устройство для его осуществления | 1991 |
|
SU1817185A1 |