которого подключен к выходу седьмог элемента И, второй вход которого соединен с вторым входом восьмого элемента И, с первым входом девятог элемента И, с входом синхронизации первого триггера, с выходом формирователя строба и через второй триг гер - с первым входом десятого элемента И, второй вход которого ,подключен к второму входу блока управления счетчиком и к выходу генератора тактовых импульсов, а выход к счетному входу формирователя стро ба, выход второго элемента ИЛИ чере четвертый инвертор подключен к второму входу девятого элемента И и через одиннадцатый элемент И - к первому входу третьего элемента ИЛИ, выход которого через третий триггер подключен к входу установки нуля формирователя строба второй 29 вход третьего элемента ИЛИ соединен с выходом третьего нуль-органа и-с вторым входом шестого элемента И, выход которого через четвертый триггер подключен к второму входу коммутатора, к первому входу четвертого ключа, второй вход которого соединен с третьим входом коммутатора и с устройством цифрового управления, третий вход - с датчиком обратной связи по скорости, а выход - с первым входом суммато ра, второй вход которого подключен к выходу вычитающего усилителя и к входу компаратора, выход сумматора является выходом устрЬйства, выход генератора одиночных импульсов подключен к входам обнуления всех триггеров и к второму входу одиннадцатого элемента И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1985 |
|
SU1347186A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942097A1 |
| Цифровое устройство для управления машиной непрерывного литья заготовок | 1989 |
|
SU1632621A1 |
| Преобразователь угловых перемещений вала в код | 1978 |
|
SU785882A1 |
| Устройство для измерения рассогласования между углом и кодом | 1987 |
|
SU1411973A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
Изобретение относится к технике автоматического управления и момсет быть использовано в установках со следящим позиционным электроприводом, в процессе работы которого существует необходимость устанавливать следящий вал на заданный угол, например, при помощи датчиков и приемников, установленных в нескольких каналах управления следящим электроприводом.
Известно задакяцее устройство следящего электропривода, содержащее си ну с но-косинусный вращакщийся транс форматор (СКВТ }, коммутирующие реле, две группы переменных резисторов по числу позиций смещенного нуля, в котором начала и концы первой и второй обмоток СКВТ через контакты соответствующих реле подсоединены к переменным резисторам, а подвижные контакты переменных резисторов в свою очередь также через вторую группу контактов упомянутых реле, подключены к выходным клеммам устройства. Это позволяет определенным образом делить выходные напряжения, трансформируемые на выходных обмотках, суммируя их на выходных клеммах устройства, получать сумму комбинаций напряжений в соответствии с заданной программой Cl JК недостаткам этого устройства следует отнести наличие двух групп переменных резисторов для каждого дискрета смещения, необходимость
предварительной установки СКВТ в положение истинного нуля, а также возможность скачков исполнительной части электропри&ода при первоначальном включении в случае смены канала
управления при наличии нескольких каналов управления.
Наиболее близким к изобретению техническим решением является задающее устройство следящего электропривода, содержащее датчик и приемник в виде СКВТ, соединенных по схеме синхронной передачи, .в которой с помощью реверсивного контактного моста выход источника питающего напряжения датчика подключается к выходным обмотках датчика 2.
К недостаткам известного устройства .следует отнести возможность случайных скачков исполнительной
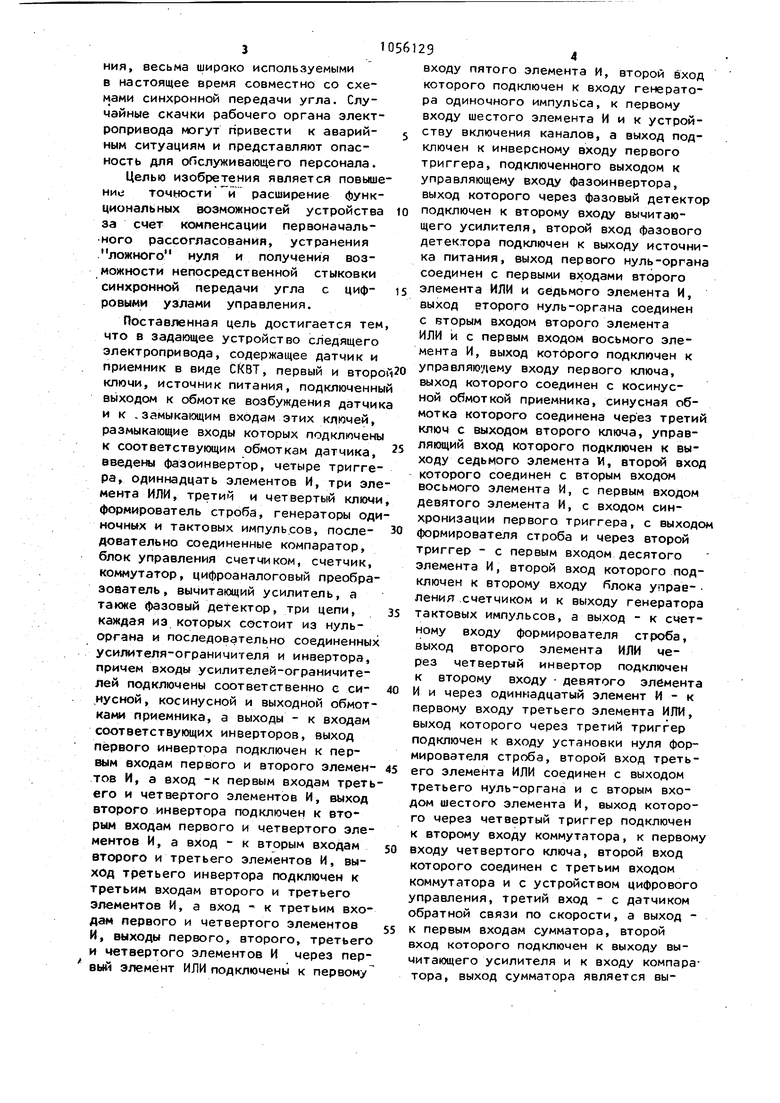
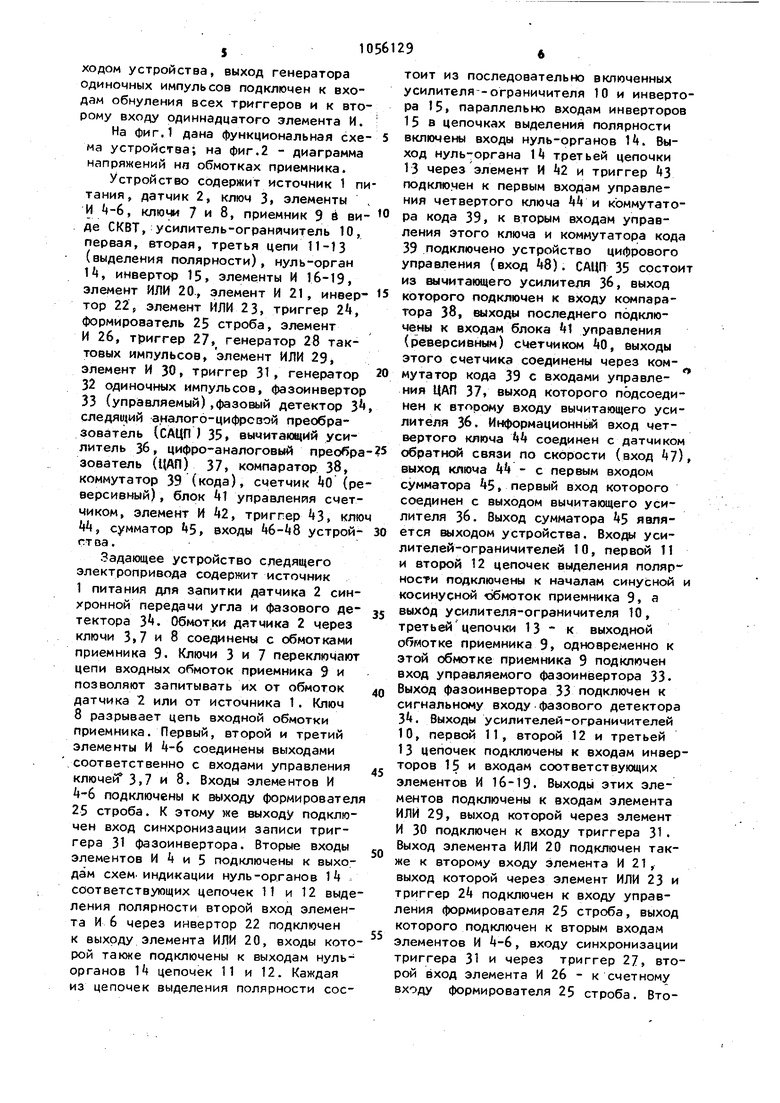
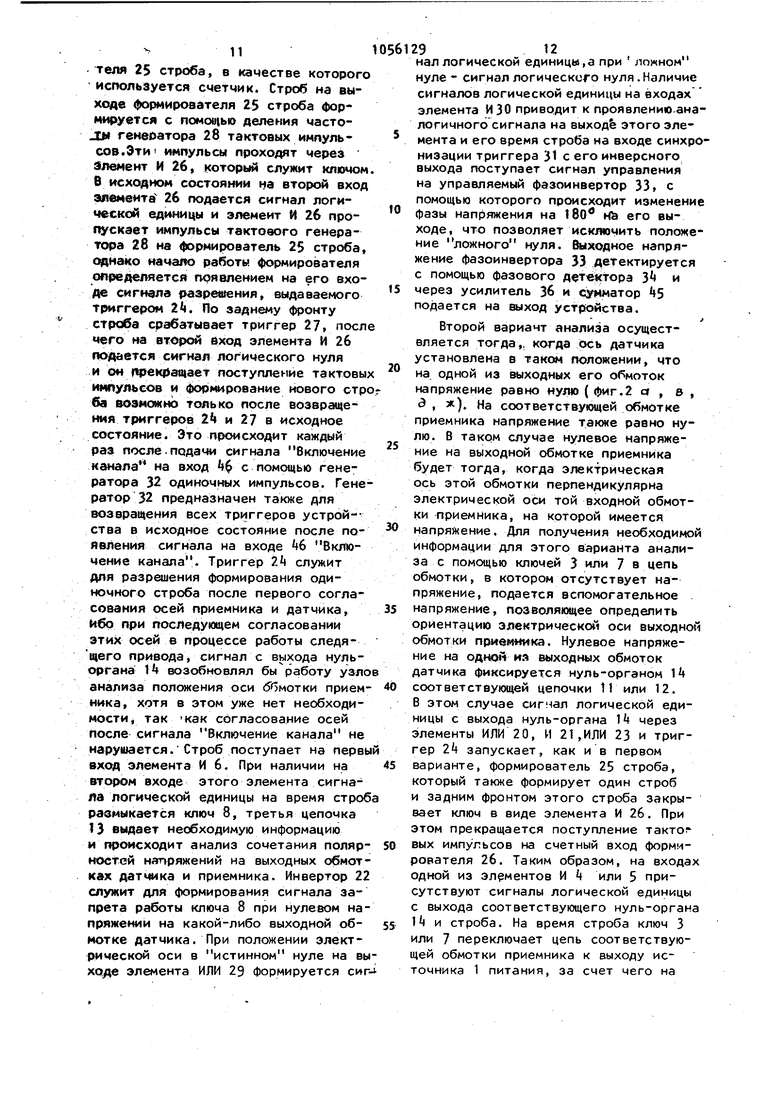
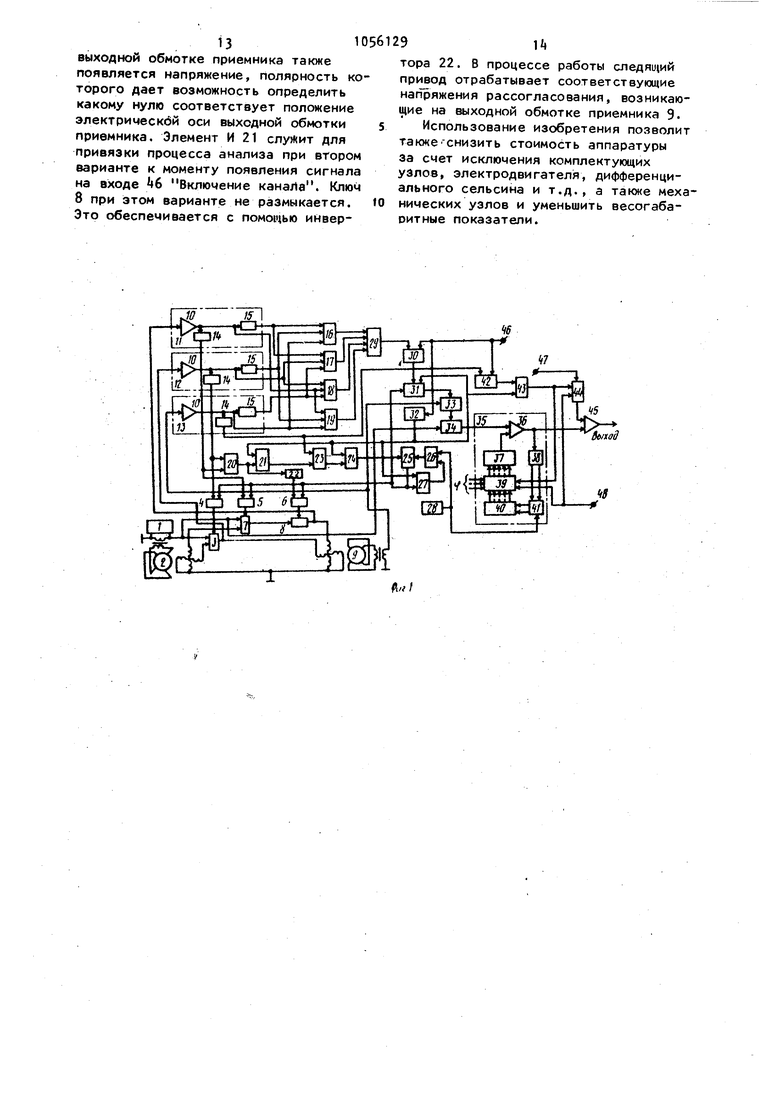
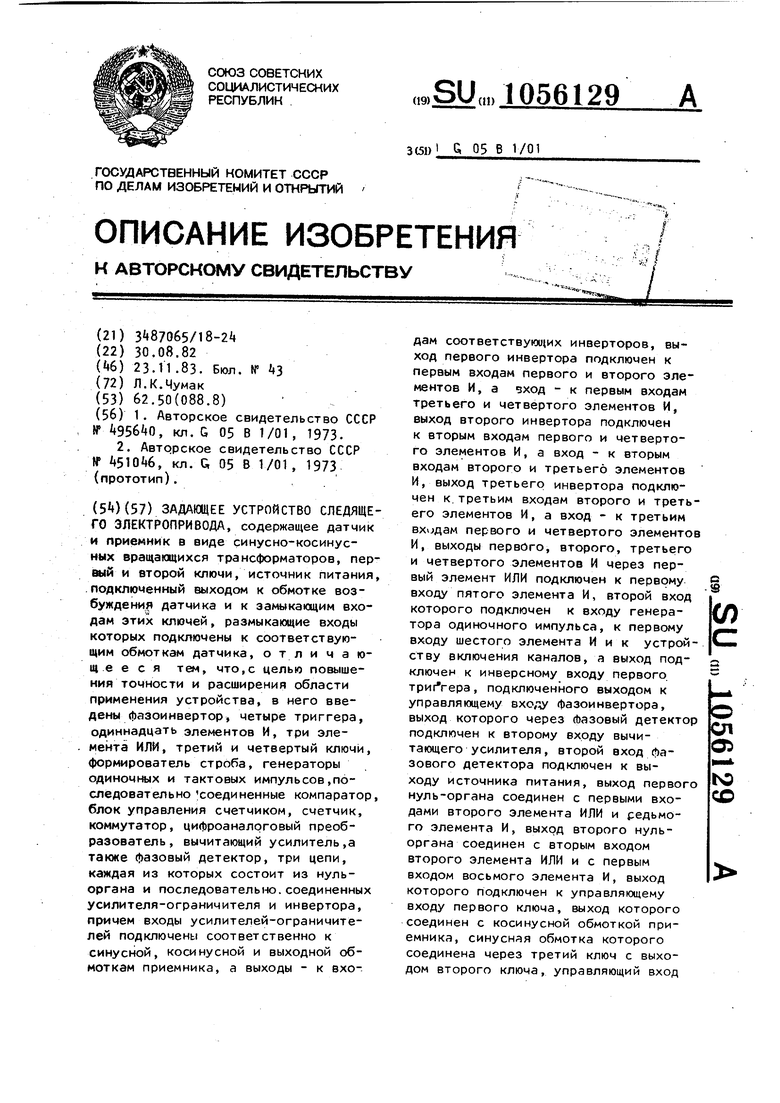
части электропривода за счет отработки ложного нуля СКВТ приемника при первоначальном включении привода или при смене канала управления при наличии нескольких каналов управления, а также невозможность стыковки с цифровыми узлами управления, весьма широко используемыми в настоящее время совместно со схемами синхронной передачи угла. Случайные скачки рабочего органа электропривода могут привести к аварийным ситуациям и представляют опасность для оПслуживающего персонала. Целью изобретения является повыше ние томности й расширение функциональных возможностей устройства за счет компенсации первоначального рассогласования, устранения .ложного нуля и получения возможности непосредственной стыковки синхронной передачи угла с цифровыми узлами управления. Поставленная цель достигается тем что в задающее устройство следящего электропривода, содержащее датчик и приемник в виде СКВТ, первый и второ ключи, источник питания, подключенны выходом к обмотке возбуждения датчик и к -Замыкающим входам этих ключей, размыкающие входы которых подключены к соответствукхцим обмоткам датчика, введены фазоинвертор, четыре триггера, одиннадцать элементов И, три эле мента ИЛИ, третий и четвертый ключи формирователь строба, генераторы оди ночнь х и тактовых импульсов, последовательно соединенные компаратор, блок управления счетчиком, счетчик, коммутатор, цифроаналоговый преобразователь, вычитаюдий усилитель, а также фазовый детектор, три цепи, каждая из которых состоит из нульоргана и последовательно соединенных усилителя-ограничителя и инвертора, причем входы усилителей-ограничителей подключены соответственно с си,нусной, косинусной и выходной обмотками приемника, а выходы - к входам соответствующих инверторов, выход первого инвертора подключен к первым входам первого и второго элементов И, а вход -к первым входам треть его и четвертого элементов И, выход второго инвертора подключен к вторым входам первого и четвертого элементов И, а вход - к вторым входам второго и третьего элементов И, выход третьего инвертора подключен к третьим входам второго и третьего элементов И, а вход - к третьим входам первого и четвертого элементов И, выходы первого, второго, третьего и четвертого элементов И через первый элемент ИЛИ подключены к первому 1 94 входу пятого элемента И, второй вход которого подключен к входу генератора одиночного импульса, к первому входу шестого элемента И и к устройству включения каналов, а выход подключен к инверсному входу первого триггера, подключенного выходом к управляющему входу фазоинвертора, выход которого через фазовый детектор подключен к второму входу вычитающего усилителя, второй вход фазового детектора подключен к выходу источника питания, выход первого нуль-органа соединен с первыми входами второго элемента ИЛИ и седьмого элемента И, выход второго нуль-органа соединен с вторым входом второго элемента ИЛИ и с первым входом восьмого элемента И, выход которого подключен к управляю:,(ему входу первого ключа, выход которого соединен с косинусной обмоткой приемника, синусная обмотка которого соединена через третий ключ с выходом второго ключа, управляющий вход которого подключен к выходу седьмого элемента И, второй вход которого соединен с вторым входом восьмого элемента И, с первым входом девятого элемента И, с входом синхронизации первого триггера, с выходом формирователя строба и через второй триггер - с первым входом десятого элемента И, второй вход которого подключен к второму входу блока упрае- ления счетчиком и к выходу генератора тактовых импульсов, а выход - к счетному входу формирователя строба, выход второго элемента ИЛИ через четвертый инвертор подключен к второму входу девятого элемента И и через одиннадцатый элемент И - к первому входу третьего элемента ИЛИ, выход которого через третий триггер подключен к входу установки нуля формирователя строба, второй вход третьего элемента ИЛИ соединен с выходом третьего нуль-органа и с вторым входом шестого элемента И, выход которого через четвертый триггер подключен к второму входу коммутатора, к первому входу четвертого ключа, второй вход которого соединен с третьим входом коммутатора и с устройством цифрового управления, третий вход - с датчиком обратной связи по скорости, а выход к первым входам сумматора, второй вход которого подключен к выходу вычитающего усилителя и к входу компаратора, выход сумматора является выходом устройства, выход генератора одиночных импульсов подключен к входам обнуления всех триггеров и к второму входу одиннадцатого элемента И. На фиг.1 дана функциональная схема устройства; на фиг.2 - диаграмма напряжений нп обмотках приемника. Устройство содержит источник 1 пи тания, датчик 2, ключ 3f элементы И , ключи 7 и 8, приемник 9 в виде СКВТ, усилитель-ограничитель 10, первая, вторая, третья цепи 11-13 (выделения полярности), нуль-орган Ij, инвертор 15, элементы И 16-19, элемент ИЛИ 20., элемент И 21, инвертор 225 элемент ИЛИ 23, триггер 2k, формирователь 25 строба, элемент И 26, триггер 27, генератор 28 тактовых импульсов, элемент ИЛИ 29, элемент И 30, триггер 31, генератор 32одиночных импульсов, фазоинвертор 33(управляемый),фазовый детектор 34 следящий аналого-цифровой преобразователь (САЦП J 35, вычитающий усилитель 36, цифро-аналоговый преобра зователь (1(АП) 37, компаратор 38, коммутатор 39 (кода), счетчик 40 (ре версивный), блок 41 управления счетчиком, элемент И 42, триггер 43, клю 44, сумматор 45, входы 46-48 устройЗадающее устройство следящего электропривода содержит источник 1 питания для запитки датчика 2 синхронной передачи угла и фазового детектора 34. Обмотки датчика 2 через ключи 3,7 и 8 соединены с обмотками приемника 9- Ключи 3 и 7 переключают цепи входных обмоток приемника 9 и позволяют запитывать их от обмоток датчика 2 или от источника 1. Ключ 8 разрывает цепь входной обмотки приемника. Первый, второй и третий элементы И 4-6 соединены выходами соответственно с входами управления ключей 3,7 и 8. Входы элементов И 4-6 подключены к выходу формировател 25 строба. К этому же выходу подключен вход синхронизации записи триггера 31 фазоинвертора. Вторые входы элементов И 4 и 5 подключены к выходам схем, индикации нуль-органов 14 соответствующих цепочек 11 и 12 выде ления полярности второй вход элемента И 6 через инвертор 22 подключен к выходу элемента ИЛИ 20, входы кото рой также подключены к выходам нульорганов 14 цепочек 11 и 12. Каждая из цепочек выделения полярности соетоит из последовательно включенных усилителя--ограничителя 10 и инвертора 15, параллельно входам инверторов 15 в цепочках выделения полярности включены входы нуль-органов 14. Выход нуль-органа I третьей цепочки 13 через элемент И 2 и триггер подключен к первым входам управления четвертого ключа kk и коммутатора кода 39, к вторым входам управления этого ключа и коммутатора кода 39 подключено устройство цифрового управления {вход 48). САЦП 35 состоит из вычитающего усилителя 36, выход которого подключен к входу компаратора 38, выходы последнего подключены к входам блока 41 управления (реверсивным) сметчиком 40, выходы этого сметчика соединены через коммутатор кода 39 с входами управления ЦАП 37, выход которого подсоединен к второму входу вычитающего усилителя 36. Информационньй вход четвертого ключа 44 соединен с датчиком обратной связи по скорости (вход 47), выход ключа 44 - с первым входом сумматора 45, первый вход которого соединен с выходом вычитающего усилителя 36. Выход сумматора 45 является выходом устройства. Входы усилителей-ограничителей 10, первой 11 и второй 12 цепочек выделения полярности подключены к началам синусной и косинусной обмоток приемника 9, а выход усилителя-ограничителя 10, третьей цепочки 13 к выходной обмотке приемника 9, одновременно к этой обмотке приемника 9 подключен вход управляемого фазоинвертора 33. Выход фазоинвертора 33 подключен к сигнальному входу фазового детектора 34. Выходы усилителей-ограничителей 10, первой 11, второй 12 и третьей 13 цепочек подключены к входам инверторов 15 и входам соответствующих элементов И 16-19. Выходы этих элементов подключены к входам элемента ИЛИ 29, выход которой через элемент И 30 подключен к входу триггера 31. Выход элемента ИЛИ 20 подключен также к второму входу элемента И 21, выход которой через элемент ИЛИ 23 и триггер 24 подключен к входу управления формирователя 25 строба, выход которого подключен к вторым входам элементов И 4-6, входу синхронизации триггера 31 и через триггер 27, второй вход элемента И 26 - к счетному входу формирователя 25 строба. Второй вход элемента И 26 совместно с входом тактовых импульсов блока tl управления реверсивным сметчиком подключен к выходу генератора 28 тактовых импульсов. Выход генератора 32 одиночных импульсов совместно с соответствующими входами элементов И 30 и 2 подключены к входу 46 устройства, куда с устройства включения каналов подается сигнал Включение канала, а выход генератора 32 одиночных импульсов подключен к обнуления триггеров 2 27, 31 И 3 и элемента И 21, Ключ 4 своим информационным входом подключен к датчику обратной связи по скорости (). Входы управлени ключа подкл«чены соответственно к выходу триггера 3 и входу , ку да подается сигнал Включение цифро вого управления, к этому же входу подключен второй вход управления коммутатором кода 39. Структура САЦП 35 и построение его отдельных узлов иззестны. Устройство работает следующим образом. При наличии напряжения на выходной обмотке приемника 9, что является следствием рассогласования осе приемника -и датчика до переноса упр ления на данный канал, на выходе нуль-органа 1 третьей .цепочки 13 н ходится сигнал логического нуля.Сиi- нал на входе ч6 Включение канала помощью генератора 32 одиночных им пульсов приведет в исходное состоян все триггеры устройства. Так как на входе элемента И tZ находится сигнал логического нуля, триггер будет в исходном состоянии, ключ в замкнутом состоянии, коммутатор 39 кода замыкает выходы реверсивного счетчика kQ на входы управления ЦАП 37. Зто обеспечивает работу САЦП 35 в следящем режиме. Напряжение рассогласования с выходной обмотки приемника 9 подается через управляемый фазоинвертор 33 на вход фазового детектора 3 и затем на вход вычитающего усилителя 36 САЦП. Процесс работы САЦП известен. С помощью САЦП н втором входе усилителя 36 САЦП сфор мировано напряжение, равное по моду |ЛЮ выходному напряжению фазового детектора З- и. противоположное по .знаку. Таким образом, напряжение на выходе усилителя 36 равно нулю. Ключ 4 находится в замкнутом состоянии и сигнал жесткой отрицательной связи по скорости поступает на первый вход сумматора усилителя 45, выход этого усилителя является выходом устройства. Усилитель 5 служит для развязки .цепи жесткой отрицательной.связи и входных цепей усилителя 36. Введение сигнала жесткой отрицательной обратной связи по скорости необходимо для устранения движения рабочего органа установки при отсутствии сигналов управления на выходе усилителя Зб. САЦП 35 содержит стандартные узлы: вычитающий усилитель Зб, компаратор 38, блок управления реверивным счетчиком,реверсивный счетчик 40 ЦАП 37.Коммутатор 39 кода введен для размыкания контура САЦП и возможности введения внешнего кода управления, т.е. .непосредственной стыковки системы передачи угла с цифровыми узлами управления. Этот режим осуществляется при поступлении на коммутатор 39 сигнала с входа tS Включение цифрового управления... .... Управление с помощью данного канала осуществляется поворотом оси приемника этого канала. Дпя исключения скачка исполнительной части электропривода управляющее напряжение формируется только после прохождения осью приемника согласованного положения. Формирование сигнала управления следящим электроприводом происходит следующим образом. В момент согласованного положения осей датчика и приемника данного канала напряжение на выходной обмотке приемника становится равным нулю. САЦП 35 отследит нулевое напряжение на первом аходе усилителя 36 и на выходе ЦАП 37 будет также нулевое напряжение. Оеновременно на выходе нуль-органа третьей цепочки 13 выделения полярности появляется сигнал логической единицы, вследствие чего на выходе элемента И 2 появится сигнал логической единицы и сработает триггер } Появление сигнала на его выходе приведет к ра.змыканию петли САЦП 35 и с помощью ключа - размыканию цепи жесткой Отрицательной обратной связи по скорости. Таким образом, напряжение выходной обмотки приемника 9 через управляемый фазоинвертор 33 поступает на фазовый детектор 3, усилитель Зб и сумматор 5. СКВТ датчик формирует на выходных обмотках напряжения в функции синуса и косинуса угла поворота сеюей оси. Эти функции в зависимост от квадранта углового положения оси характеризуются соответствующим знаком {полярность напряжения ). Для определения положения электрической оси выходной обмотки приемника, соответствующего истинному нулю, используются сочетания признаков полярности выходных напряже НИИ датчика и приемника.В устройстве п дусмотрены цепочки 11-13 выделения полярности. Усилители 10 и инверторы 15 формируют сигналы логической единицы, которые по времени соответ ствуют отрицательной и положительны полуволнам напряжения в цепях датчи и приемника, эти сигналы позволяют селектировать признаки полярности соответствующих выходных напряжений Элементы И в соответствии с приведенными на фигП соединениями их входов с выходами усилителей-ограни чителей 10 и инверторов 15 соответствующих цепочек формируют на своих выходах сигналы логической единицы, наличие которых является признаком соответствия положению истинного нуля электрической оси выход1Чой обмотки приемника в каждом из четырех квадрантов, т.е. каждый из упомянутых элементов И селектирует соответ ствующие сочетания сигналов логичес кой единицы в своем квадранте. Со четания сигналов логических единиц для истинного нуля проверены эксп риментально. С помощью элемента ИЛИ 29 инфор мация о положении оси обмотки сосредотачивается на одном выходе. Для иллюстрации принципа получения инфор мации о положении электрической оси выходной обмотки приемника на фиг.2 приведены диаграммы напряжений на выходных обмотках датчика и приемника при положении оси датчика в различных квадрантах, а также на границе соседних квадрантов. По осям орди нат и абсцисс отложены векторы напря йений на выходных обмотках датчика (входных обмотках приемника. Электрическая ось выходной обмотки приемника обозначена пунктиром.На эту ось спроектированы векторы вход ных напряжений приемника, трансформированных в реальных условиях на ,его выходную обмотку. Обозначения Н и К соответствуют началу и концу этой обмотки. При автоматическом анализе положения истинного нуля возможны два варианта в зависимости от положения оси датчика. Первый вариант анализа производится в том случае, когда на обоих выходных обмотках датчика (входных обмотках приемника ) имеются напряже- ния Кчзпример, фиг.26, г ,е, з1 Нулевому напряжению на выходной обмотке приемника соответствует такое положение оси приемника, когда синусная и косинусная компоненты трансформируются на эту обмотку равными по модулю и противоположными по фазе. При положении оси приемника, соответствующему истинному нулю, векторы проекции напряжений упомянутых компонент условно направлены от точки 0;. Если развернуть ось приемника на напряжение на его выходной обмотке также равно нулю, так как в этом случае проекции компонент также равны и противоположны по фазе, но векторы в данном случае направлены к точке 0. Это положение соответствует ложному нулю синхронной передачи угла. Так как в положениях истинного и ложного нуля напряжение на выходной обмотке приемника отсутствует и не имеется информации в виде элект4}ических сигналов, то для проведения анализа с помощью ключа 8 обесточивается одна из входных обмоток приемника. Это приводит к исключению соответствующей компоненты, и в свою очередь появлению на выходной обмотке напряжения, полярность которого в сочетании с полярностями напряжений на обмотках датчика позволяет однозначно определить истинность нулевого положения электрической оси выходной обмотки приемника. Этот принцип реализуется .следующим образом. При нулевом значении напряжения на выходной обмотке приемника, нуль-орган 1 цепочки 13 формирует сигнал логической единицы. Этот сигнал поступает на элемент ИЛИ 23 и на триггер 2. Сигнал с выхода триггера 2k выдает сигнал разрешения для начала работы формирова. те/w 25 строба, в качестве которого используется счетчик. Строб на выходе формирователя 25 строба фор м фуется с помощью деления частоJW генеоатора 28 тактовых импульсов. Эти импульсы проходят через Элемент И 26, которь служит ключом 8 исходном состоянии на второй вход аяенеита 26 подается сигнал логической единицы и элемент И 26 пропускает импульсы тактового генератора 26 на формирователь 25 строба, однако начат) работы формирователя определяется появлением на его входе сигнала разрешения, выдаваемого триггером 2k. По заднему (}чэонту строба срабатывает триггер 27, посл чего на второй вход элемента И 26 подается сигнал логического нуля и ои (прекращает поступление тактовы им1ульсов и формирование нового стр ба возможно только после возвращения триггеров 2 и 27 в исходное состояние. Это происходит каждый раз после.подачи сигнала Включение канала на вход k с помощью генератора 32 одиночных импульсов. Гене ратор 32 предназначен также для возвращения всех триггеров устрой-ства в исходное состояние после появления сигнала на входе 6 Включение канала. Триггер Л служит для разраиения формирования одиночного строба после первого согласования осей приемника и датчика, ибо при последующем согласовании этих осей в процессе работы следящего привода, сигнал с выхода нульоргана 1 возобновлял бы работу узл анализа положения оси Обмотки прием ника, хотя в этом уже нет необходимости j так как согласование осей После сигнала Включение канала не нарушается. Строб поступает на перв вход элемента И 6. При наличии на втором входе этого элемента сигнала логической единицы на время стро размыкается ключ 8, третья цепочка }3 выдает необходимую информацию и происходит анализ сочетания поляр ностей напряжений на выходных обмот ках датчика и приемника. Инвертор 2 служит для формирования сигнала запрета работы ключа 8 при нулевом на пряжении на какой-либо выходной обмотке датчика. При положении электрической оси в истинном нуле на в xo/ie элемента ИЛИ 29 формируется СИ 9 .12 нал логической единиц,а при ложном нуле - сигнал логического нуля. Наличие сигналов логической единицы на входах элемента ИЗО приводит к проявлению.аналогичного сигнала на выходе этого элемента и его время строба на входе синхронизации триггера 31 с его инверсного выхода поступает сигнал управления на управляемый фазоинвертор 33, с помощью которого происходит изменение фазы напряжения на 80 Иё его выходе, что позволяет иск/яочить положение ложного нуля, выходное напряжение фазоинвертора 33 детектируется с помощью фазового дете-ктора и через усилитель 36 и рунматор kS подается на устройства. Второй вариант анализа осуществляется тогда,, когда Ось датчика установлена в таком положении, что на одной из шходных его оРмоток напряжение равно нулю { фиг.2 а , е , 5 , ж). На соответствующей обмотке приемника напряжение также равно нулю. В таком случае нулевое напряжение на выходной обмотке приемника будет тогда, когда электрическая ось этой обмотки перпендикулярна электрической оси той входной обмотки приемника, на которой имеется напряжение. Для получения необходимой информации для этого варианта анализа с помощью ключей 3 или 7 в цепь обмотки, в котором отсутствует напряжение, подается вспомогательное напряжение, позволяющее определить ориентацию электрической оси выходной обмотки приемника. Нулевое напряжение на одноА и.« выходных обмоток датчика фиксируется нуль-органом 14 соответствующей цепочки 1 или 12. В этом случае логической единицы с выхода нуль-органа I через элементы ИЛИ 20, И 21,ИЛИ 23 и триггер 2k запускает, как ив первом варианте, формирователь 25 строба, который также формирует один строб и задним фронтом этого строба закрывает ключ в виде элемента И 26. При этом прекращается поступление такто вых импульсов на счетный вход формирователя 2б. Таким образом, на входах одной из элементов И k или 5 присутствуют сигналы логической единицы с выхода соответствующего нуль-органа }Ц и строба. На время строба ключ 3 или 7 переключает цепь соответствующей обмотки приемника к выходу источника 1 питания, за счет чего на выходной обмотке приемника также появляется напряжение, полярность ко торого дает возможность определить какому нулю соответствует положение электрическбй оси выходной обмотки приемника. Элемент И 21 слулит для привязки процесса анализа при втором варианте к моменту появления сигнала на входе t6 Включение кана/ta. Ключ 8 при этом варианте не размыкается. Это обеспечивается с помощью инверfe10 fe тора 22. В процессе работы следяи1ий привод отрабатывает соответствующие напряжения рассогласования, возникаюujMe на выходной обмотке приемника 9. Использование изобретения позволит также СНИЗИТЬ стоимость аппаратуры за счет исключения комплектующих узлов, электродвигателя, дифференциального сельсина и т.д., а также механических узлов и уменьшить весогабаритные показатели.
linSin
a .f
