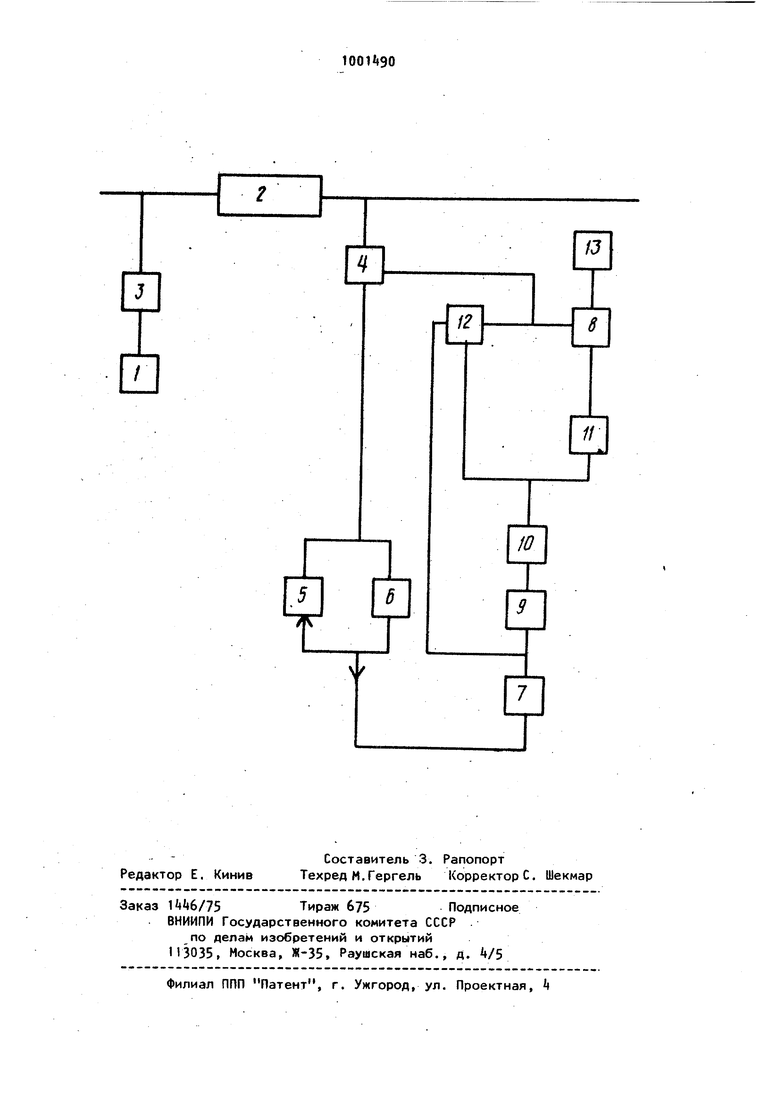
Изобретение относится к технике электросвязи и моиет использоваться для дистанционного контроля амплитудно-частотных характеристик каналов связи без перерыва связи. По основному авт.св. ff 585611 из вестно устройство для контроля амплитудно-частотных характеристик каналов связи, содержащее на передающей стороне автогенератор качающейся частоты, выход которого подключен через аттенюатор.к входу канала связи, а на приемной стороне выход канала-связи соединен с входом коррелятора, выход которого подключен к первому входу блока индикации, выход коррелятора под ключен к входу блока синхронизации выход которого подключен через ждущий генератор качающейся частоты к второму входу коррелятора, к которому подключен выход опорного генератора, и к второму входу блока и дикации непосредственно 1 . Однако известное устройство имеет недостаточную точность контроля. Цель изобретения - повышение точности контроля путем снижения влияния случайной составляющей погрешности контроля из-за снижения уровня помех от полезных сигналов. Для этого в устройство для контроля амплитудно-частотных характеристик каналов связи, содержащее на передающей стороне автогенератор качающейся частоты, выход которого подключен через аттенюатор к входу канала связи, а на приемной стороне выход канала связи соединен с входом коррелятора, выход которого подключен к первому входу блока индикации, выход коррелятора подключен к входу блока синхронизации, выход которого подключен через ждущий генератор качающейся частоты к второму входу коррелятора, к которому подключен выход опорного генератора, и к второму входу блока индикации непосредственно, вве, дены на приемной стороне последовательно соединенные амплитудный детектор t пороговый элемент, элемент НЕ и первый коммутатор, и второй коммутатор, при этом выход ждущего генератора качаЮ1Це14ся частоты подключен входу амплитудного детектора и через второй коммутатор, второй вход котор го соединен с выходом порогового эле мента, подключен к второму входу кор релятора, который соединен и с выходом опорного генератора через первый коммутатор. На чертеже представлена структурная электрическая схема предлагаемого устройства. Устройство для контроля амплитудн частотных характеристик содержит на передающей стороне автогенератор 1 качающейся частоты, канал 2 связи, а тенюатор 3, а на приемной стороне ко релятор 4, блок 5 индикации, блок 6 синхронизации, ждущий генератор 7 ка чающейся частоты, первый коммутатор амплитудный детектор 9, пороговый эл мент 10, элемент НЕ 1.1, второй комму татор 12, опорный генератор 13. Устройство работает следующим образом, при включении питания на приемной стороне напряжение с линейно-изменяю щимся значением частоты на выходе жд щегр генератора 7 качающейся частоты отсутствует. Поэтому на выходе ампли тудного детектора 9 напряжение равно нулю, на выходе порогового элемента 10 низкий потенциал, второй коммутатор 12 закрыт, а первый комму татор 8, который подключен к выходу порогового элемента 10 через элемент НЕ 11, открыт. В результате этого выход опорного генератора 13 подключен к второму входу коррелятора 4. Схема приемной части устройства находится в исходном состоянии. При перестройке автогенератора 1 качающейся частоты на передающей стороне зондирующий сигнал с необходимым уровнем через аттенюатор 3 поступает на вход контролируемого канала 2 связи. Аддитивная смесь шумов полезного и зон дирующего сигналов поступает на первый вход кйррепятора t. В это время на второй вход коррелятора k подается напряжение с-постоянной частотой с выхода опорного генератора 13. В момент равенства значений несущей частоты зондирующего сигнала автогенератора 1 качающейся частоты и фиксированной частоты опорного генератора 13 на выходе коррелятора k появляется калибровочный импуЛьс, который соответствует началу перестройки зондирующего сигнала в проверяемой полосе частот контролируемого канала 2 связи. Калибровочный импульс поступает в блок 6 синхронизации, который запускает ждущий генератор 7 качающейся частоты, а также в блок 5 индикации. Синхронизация запуска ждущего генератора 7 качающейся частоты таким образом осуществляется в начале каждого цикла перестройки автогенератора 1 качающейся частоты. После запуска ждущего генератора 7 качающейся частоты на его выходе появляется напряжение с постоянной амплитудой и частотой, изменяющейся по линейному закону. В результате этого на выходе амплитудного детектора У появляется, напряжение, потенциал на выходе порогового элемента 10 стает высоким, второй коммутатор 12 откроется, а первый коммутатор 8 закроется. Таким образом произойдет автоматическое отключение выхода опорного генератора 13 от второго входа коррелятора А и подключение к нему выхода ждущего генератора 7 качающейся частоты. При синхронной перестрой ке автогенератора 1 качающейся частоты и ждущего генератора 7 качающейся частоты, опорный сигнал с выхода которого поступает на второй вход коррелятора А, в нём происходит оптимальная обработка прошедшего через канал 2 связи зондирующего сигнала на фоне шумов и полезных сигналов канала 2 связи, которые для коррелятора Ц являются помехой. Свертка спектора зондирующего сигнала в корреляторе Ц происходит в полосе частот, которая значительно меньше полосы частот проверяемого канала 2 связи. Если модуляционные характеристики автогенератора 1 качающейся частоты и ждущего генератора 7 качающейся частоты идентичны,, то полоса коррелятора t может составлять единицы или десятки герц, что позволяет выделить свернутый по спектору зондирующий .сигнал из шумов канала 2 связи. Помехозащищённость коррелятора при воздействии на его входы полезных сигналов канала 2 связи обеспечивается выбором базы (В) зондирующего сигнала , где F - полоса частот канала связи 2, т - время перестройки в полосе F, которая за счет большого времени перестройки выбираетсязначительно больше единицы. Поэтому зондирующий сигнал с большой базой и полезные сигналы каналов 2 связи, имеющие значения база В 1 является взаимно совместными Уровень помбх полезных сигналов проверяемого канала связи 2 определяется только коэффициентом перехода помех К , который, например, при составит всего KiJO.OOl, так как в этом случае в процессе контроля мешаю1чее действие опорного генератора 13 исключено. Выходной сигнал коррелятора k, пропорциональный амплитудно-частотной характеристике канала 2 связи, поступает в блок 5 индикации. После того как текущее зна чение частоты на выходе ждущего генератора 7 качающейся частоты достигает максимального значения начинается обратный цикл изменения текуще го значения от максимального к минимальному ,ждущий генератор 7 качающейся частоты приходит в исходное состоя ние, напряжение на его выходе станет равным нулю. Так как автогенератор 1 качающейся частоты на передающей стороне работает в автоколебательном режиме, то обратный ход изменения текущего значения частоты ждущего генератора 7 качающейся частоты должен проходить быстрее, чем у автогенератора 1 качающейся частоты.Как только напряжение на выходе ждущего генератора 7 качающейся частоты станет равным нулю, на выходе порогового эле мента 10 потенциал станет низким, вто рой коммутатор 12 отключит выход ждущего генератора 7 качающейся частоты от второго входа коррелятора , а первый коммутатор 8 опять подключит выход опорного генератора 13 ко второму входу корреллятора k. Схема приемной стороны устройства находится в исходном состоянии. Элемент НЕ 11 кроме основной функции инвертирования управляющего сигнала выполняет также функцию элемента задержки.В частности по окончании цикла контроля . управляющий сигнал подается сразу «а второй коммутатор 12, а на первый ком мутатор 8 - с задержкой, определяемой переходом элемента НЕ 11 из состояния логического нуля в состояние логической единицы. В результате этого исключается подача напряжения с выхода опорного генератора 13 на вход амплитудного детектора 9 через второй коммутатор 12, что могло бы привести к сбою в работе схемы. При новом поступлении на вход коррелятора зондирующего сигнала из проверяемого канала 2 связи опять на выходе коррелятора k появится калибровочный импульс, который поступит на вход блока 5 индикации и блока 6 синхронизации . и далее опять произведет запуск жду щего генератора 7 качающейся частоты. Далее произойдет отключение от второго входа коррелятора выхода опорного генератора 13 и подключение к нему выхода ждущего генератора 7 качающейся частоты. Начинается новый цикл контроля. Таким образом, предлагаемое устройство позволяет повысить точность контроля снижением влияния случайной составляющей погрешности контроля . из-за снижения, уровня помех от полезных сигналов, т.е. сделать его зависимым только от базы зондирующего сигнала и независимым от вида передаваемой информации в момент контроля по контролируемому каналу связи. Формула изобретения Устройство для контроля амплитудно-частотных характеристик каналов связи по авт.св. № 585611, отличающееся тем, что, с целью повышения точности контроля, в него введены на приемной стороне последовательно соединенные амплитудный детектор, пороговый элемент, элемент НЕ и первый коммутатор, и второй коммутатор, при этом выход ждущего генератора качающейся частоты подключен к входу амплитудного детектора и через второй коммутатор, второй вход которого соединен с выходом порогового элемента, подключен к второму входу коррелятора, который соединен и с выходом опорного генератора через первый коммутатор. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 585611, кл. Н Oi В ,1976 (прототип).
12
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля амплитудно-частотных характеристик каналов связи | 1981 |
|
SU985953A2 |
| Устройство для контроля амплитудночастотных характеристик каналов связи | 1976 |
|
SU585611A1 |
| Устройство для контроля амплитудно-частотных характеристик каналов связи | 1980 |
|
SU928662A2 |
| Устройство для контроля амплитудно-частотной характеристики канала связи | 1982 |
|
SU1046949A1 |
| Устройство для контроля амплитудно-частотной характеристики канала связи | 1983 |
|
SU1148123A2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2450363C2 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 1994 |
|
RU2066925C1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1985 |
|
SU1840282A1 |
| УСТРОЙСТВО для КОНТРОЛЯ УРОВНЕЙ СИГНАЛОВ в ТЕЛЕФОННЫХ КАНАЛАХ СНСТЕМ СВЯЗИ | 1972 |
|
SU436449A1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ КОНТРОЛЯ ДВУХ ЗОН СЕЛЕКЦИИ ЦЕЛИ ПО ДАЛЬНОСТИ | 2023 |
|
RU2822284C1 |