Предлагаемое изобретение относится к области радиосвязи и может быть использовано в радиолокационных, радионавигационных и связных системах с шумоподобными сигналами при наличии нестабильности несущей частоты, за счет эффекта Допплера и других факторов.
При использовании искусственных спутников Земли в радиолиниях наблюдается изменение принимаемой частоты сигнала в приемном устройстве по сравнению с частотой передатчика. Это обусловлено эффектом Допплера, а также нестабильностями опорных генераторов передатчика и приемника. Вопросы поиска и обнаружения шумоподобных сигналов в таких радиолиниях с корреляционной обработкой сигнала на приемной стороне приобретают особую сложность для сигналов с большими базами.
Известны устройства поиска и обнаружения шумоподобных сигналов, описания работы которых приведены в книгах: "Шумоподобные сигналы в системах передачи информации" под редакцией В.Б.Пестрякова М.: Сов. радио, 1973 г., Тузов Г.И. "Статистическая теория приема сложных сигналов", М.: Сов. радио, 1977 г.
Однако описанные в этих книгах устройства обладают основным недостатком: низкой помехозащищенностью поиска шумоподобных сигналов при наличии нестабильности несущей частоты на приемной стороне.
Известны устройства поиска, в которых при приеме шумоподобных сигналов с большими базами широко применяются параллельно-последовательные методы поиска. При этом одновременно анализируется n элементов функции неопределенности шумоподобного сигнала. Так, например, в устройстве для ускорения поиска содержится три группы корреляционных каналов обнаружения с грубой и точной подстройками фазы. Выходы трех групп корреляционных каналов обнаружения - левой, правой и центральной - соединены со схемами выбора максимальных значений сигналов и схемой сравнения, на другой вход которой подается напряжение с формирователя порога. Кроме того, устройство включает в себя опорный генератор псевдослучайной последовательности (ГПСП), регистр сдвига, схему управления по задержке. Работа устройства заключается в параллельно-последовательном поиске временного положения сигнала с помощью трех групп корреляционных каналов. На каждом цикле поиска принимается решение об обнаружении сигнала по превышению порога корреляционным откликом с выхода любого из корреляторов указанных выше трех групп.
При этом число временных интервалов поиска равно
где Тпсп - период псевдослучайной последовательности (ПСП),
τ0 - длительность элементарного импульса кодовой структуры
ПСП,
n - число корреляционных каналов в левой или правой группе.
Время поиска при этом составляет
где Тнак - время накопления.
При превышении порога сигналом осуществляется грубая подстройка фазы с длительностью τ0 до тех пор, пока сигнал не окажется в центральной группе корреляционных каналов обнаружения.
При появлении сигнала в центральной группе начинает работать точная подстройка по фазе и одновременно производится слежение за временным положением сигнала.
Однако описанное выше устройство имеет основной недостаток - низкую помехозащищенность при наличии нестабильности частоты входного шумоподобного сигнала. Действительно, при наличии нестабильности несущей частоты входного шумоподобного сигнала полоса интегратора, в качестве которого применяется полосовой фильтр, входящий в состав корреляционного канала обнаружения, должна выбираться с учетом нестабильности несущей частоты входного шумоподобного сигнала. Так, если полоса входного шумоподобного сигнала равна Δfвх=4000 кГц, а полоса интегратора, выбранная из требования помехозащищенности, ΔFn=1 кГц, то в этом случае реализуемая база сигнала составит 4000.
Но из-за нестабильности несущей частоты входного шумоподобного сигнала, вызванной, например, эффектом Допплера, равной Δfнест=100 кГц, реализуемая база уменьшается до 40. Таким образом происходит снижение помехозащищенности устройства.
Этот недостаток можно устранить, например, путем осуществления поиска по частоте входного шумоподобного сигнала.
Однако указанный в этом устройстве метод приводит к значительному увеличению времени поиска входного шумоподобного сигнала. Так, при наличии тех же данных, которые приведены выше, для реализации базы сигнала 4000 потребуется время поиска, равное
где время Тпоиска определяется по формуле (2), а m по формуле (4)
Кроме того, данному устройству присущ следующий недостаток:
- низкая помехозащищенность устройства в режиме поиска шумоподобного сигнала из-за применения неоптимального метода обнаружения, в котором производится раздельное сравнение каждого из всех n корреляционных откликов с пороговым уровнем, что приводит к потерям энергии сигнала при его обнаружении.
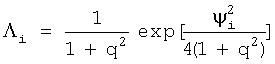
Наиболее близким по технической сущности к предлагаемому изобретению является устройство поиска шумоподобного сигнала по авт.св. № 1840270, блок-схема которого приведена на фиг.1.
На фиг.1 введены следующие обозначения
1 - блок регистров сдвига,
2 - перемножитель,
3 - интегратор,
4 - амплитудный детектор,
5 - блок принятия решения и управления,
6 - блок синхронизации,
7 - управляемый генератор псевдослучайной последовательности,
8 - управляемый усилитель,
9 - сумматор,
10 - линия задержки,
11 - блок смещения частоты,
12 - коммутатор,
13 - генератор сигнала смещения частоты,
14 - схема сравнения,
15 - генератор эталонного напряжения,
16 - блок частотно-временного преобразования сигнала.
Устройство-прототип имеет следующие функциональные связи.
Вход устройства соединен с радиочастотными входами перемножителей 2, выдеочастотные входы которых соединены с выходами блока регистров сдвига 1, входы которого подключены к одному из выходов блока синхронизации 6 и к первому входу управляемого генератора псевдослучайной последовательности 7, выход которого соединен с другим входом блока регистра сдвига 1, выходы перемножителей 2 в каждом корреляционном канале через последовательно соединенные интеграторы 3 и блоки частотно-временного преобразования сигналов 16 соединены с соответствующими входами схемы сравнения 14 и амплитудными детекторами 4, выходы которых подключены к блоку принятия решения и управления 5, выходы которого соединены с первыми тремя входами блока синхронизации 6, второй и третий выходы которого подключены к другим входам управляемого генератора псевдослучайной последовательности 7, а четвертый выход соединен с одним из входов схемы сравнения 14, другой вход роторов подключен к генератору эталонного напряжения 15, выходы схемы сравнения 14 подключены к первому входу блоков частотно-временного преобразования сигналов 16, второй вход которых соединен с генератором сигнала смещения частоты 13, третий вход блоков 16 соединен с пятым выходом блока синхронизации 6, четвертый и пятый входы которого соединены с выходами левого и правого корреляционных каналов центральной группы. Шестой выход блока 6 соединен с одним из входов блока 5.
Устройство (прототип) работает следующим образом. Входной шумоподобный сигнал подается на входы перемножителей 2, на другие входы которых подаются опорные псевдослучайные последовательности с блоков регистра сдвига 1, сдвинутые друг относительно друга на длительность элементарного символа τ0 кодовой структуры ПСП. Результаты перемножения с выхода каждого перемножителя поступают на соответствующие интеграторы 3.
Ширина полосы пропускания интегратора выбирается равной не менее полосы нестабильности несущей частоты входного шумоподобного сигнала, то есть интегратор выполнен широкополосным. Однако благодаря тому, что между интегратором 3 и амплитудным детектором 4 включен блок частотно-временного преобразования сигнала 16, снижения помехозащищенности не происходит.
Это эквивалентно повышению помехозащищенности по сравнению с устройством для ускорения поиска, у которого полоса интегратора, при наличии нестабильности несущей частоты входного шумоподобного сигнала, расширяется на величину полосы этой нестабильности для осуществления поиска и у каждого отсутствует блок частотно-временного преобразования сигнала.
С выходов блоков частотно-временного преобразования сигнала 16 сигнал поступает на амплитудные детекторы 4, в которых выделяется огибающая и далее поступает на блок принятия решения и управления 5 для сравнения с порогом.
В отсутствие превышения порога, хотя бы одним из сигналов, сигнал управления 0 на выходе блока принятия решения и управления 5 отсутствует, что является разрешением для блока синхронизации 6 к перестройке фазы управляемого генератора псевдослучайной последовательности 7 на n·τ0. Таким образом осуществляется поиск широкополосного сигнала в i-ой зоне длительностью n·τ0.
Цикл поиска входного шумоподобного сигнала повторяется для следующего сигнала i+1 интервала и т.д., до тех пор, пока не пройдет просмотр всего периода или всех фаз шумоподобного сигнала.
В момент превышения порога сигналом с любого амплитудного детектора 4 блок принятия решения и управления 5 вырабатывает сигнал 0, которым запрещается перестройка управляемого генератора ПСП по n·τ0, одновременно формируется сигнал Гр, по которому блок синхронизации 6 меняет фазу управляемого генератора ПСП7, осуществляя подстройку фазы по τ0 до тех пор, пока сигнал не окажется в центральном канале. При появлении сигнала в центральном канале блок принятия решения и управления 5 вырабатывает команду точной подстройки Тч, согласно которой блок синхронизации 6 прекращает подстройку по τ0 и включает точную подстройку по фазе τ0/К, где К - целое число, по управляющим сигналам В и С, которые поступают с левого и правого каналов центральной группы.
В конце каждого интервала времени накопления с блока синхронизации 6 формируются и подаются на блок принятия решения и управления 5 импульсы считывания ИС. При этом происходит сравнение выборки сигнала с порогом, а на блок частотно-временного преобразования сигнала 16 поступает импульс гашения (ИГ), с блока 6, передний фронт которого совпадает с задним фронтом импульса считывания. Длительности импульсов считывания и гашения соответствуют длительности времени линии задержки в блоке частотно-временного преобразования 16. В момент прихода импульса гашения на блок 16 кольцо обратной связи в этом блоке разрывается и происходит подготовка блока частотно-временного преобразования сигналов 16 к новому интервалу Тнак.
На блок частотно-временного преобразования сигнала 16 подается сигнал генератора смещения частоты 13, частота которого выбирается, исходя из параметров обратной связи блока 16.
где Т - время задержки кольца обратной связи блока 16.
Для увеличения динамического диапазона блока частотно-временного преобразования сигналов 16 используется система АРУ. На схему сравнения 14 поступает сигнал постоянного уровня с генератора эталонного напряжения 15, а на другие входы - сигналы со всех линеек частотно-временного преобразования сигналов 16. Происходит выравнивание коэффициентов передачи во всех корреляционных линейках. В момент обнаружения сигнала с блока синхронизации 6 поступает сигнал, которым разрывается кольцо АРУ и запрещается изменение коэффициента передачи в основном тракте до выхода из синхронизации, т.е. прекращается изменение управляющего напряжения АРУ на блоки частотно-временного преобразования сигналов 16 во всех линейках одновременно. Таким образом, в момент приема входного шумоподобного сигнала, коэффициенты передачи во всех линейках остаются приблизительно одинаковыми.
Однако описанное выше устройство (прототип) имеет низкую помехозащищенность, обусловленную неоптимальным способом обнаружения из-за раздельного сравнения корреляционных откликов с порогом. Оценим количественно величину снижения помехозащищенности.
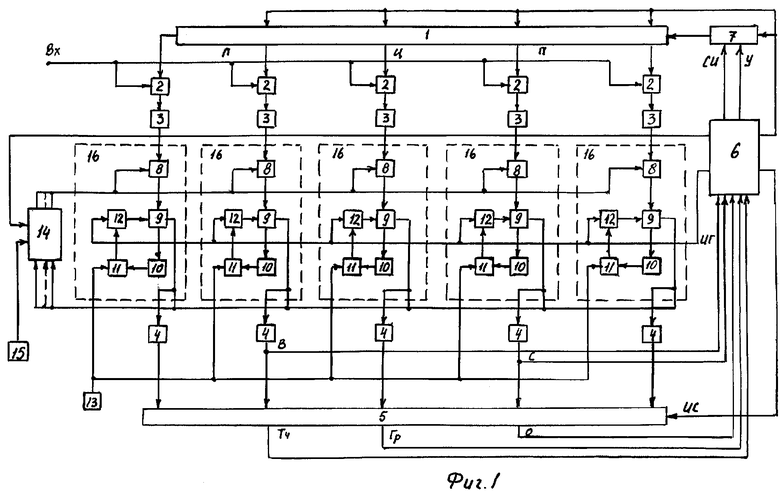
Известно, что если опорный и входной сигналы точно согласованы по времени задержки τ, то амплитуда выходного сигнала коррелятора, определяемая через взаимокорреляционную функцию входного и опорного сигналов R(τ), будет максимально возможной Umax=R (0).
При рассогласовании по времени задержки входного и опорного сигналов величина корреляционного отклика будет уменьшаться. Для ШПС с фазовой манипуляцией зависимость R(τ) может быть представлена (в области сильной корреляции) треугольной функцией (см. фиг.2).
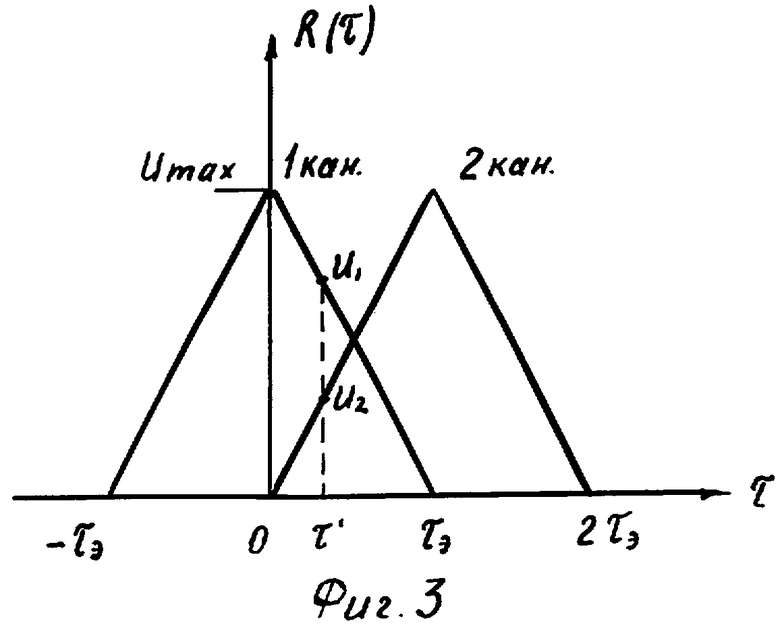
Рассматривая работу 2 корреляционных каналов, на которые подаются опорные ПСП, сдвинутые по временя на длительность элемента τэ, можно представить зависимость выходных сигналов корреляторов двумя сдвинутыми на τэ треугольными функциями (см. фиг.3).
Для К корреляционных каналов выходной сигнал может быть представлен совокупностью K треугольных функций. Если в процессе поиска входной сигнал оказался в данной группе анализируемых ячеек, то корреляционный отклик появляется при этом всегда в двух соседних корреляционных каналах, за исключением тех случаев, когда задержка входного сигнала выходит за границы крайних корреляционных каналов. При этом амплитуда выходного сигнала коррелятора становится меньше максимально возможной, например, как показано на фиг.3 значение сигналов на выходах 1 и 2 каналов
U1; U2<Umax
В наихудшем случае, при значении задержки входного сигнала τ=τэ/2 амплитуда корреляционного отклика уменьшается в 2 раза, что эквивалентно энергетическим потерям 6 дБ при обнаружении. Поскольку на практике величина τ случайна, то расчет среднего значения корреляционного отклика будем проводить, предполагая, что плотность распределения ω(τ) равномерна в интервале [0, τэ]
т.е. 
Среднее значение выходного сигнала определим по формуле

Средний энергетический проигрыш, таким образом, составит 2 дБ. Этот проигрыш посчитан для идеальной функции корреляции шумоподобного сигнала. Реально, такой сигнал проходя через линейные резонансные цепи: - колебательные контуры, фильтры и т.п., искажается, и его функция корреляции, в частности главный лепесток, расширяется (см. книгу В.И.Винокуров, Р.А.Ваккер "Вопросы обработки сложных сигналов в корреляционных системах" М.: Советское радио, 1972 г., стр.163-178). При расширении главного лепестка корреляционной функции его амплитуда падает и он как-бы "расползается", захватывая теперь уже более трех корреляционных каналов, хотя полная мощность пика, определяемая его площадью, сохраняется.
Цель предлагаемого изобретения - повышение помехоустойчивости обнаружения шумоподобного сигнала.
Для достижения поставленной цели в устройство-прототип дополнительно введены n канальных нелинейных элементов с экспоненциальной характеристикой, n-входовый сумматор, пороговый элемент, формирователь порога, стробирующий элемент.
Блок-схема предлагаемого устройства приведена на фиг.4, где введены следующие обозначения:
1 - блок регистров сдвига,
2 - перемножитель,
3 - интегратор,
4 - амплитудный детектор,
5 - блок принятия решения и управления,
6 - блок синхронизации,
7 - управляемый генератор псевдослучайной последовательности,
13 - генератор сигнала смещения частоты,
14 - блок сравнения,
15 - генератор эталонного напряжения,
16 - блок частотно-временного преобразования сигнала,
17 - нелинейный элемент, с экспоненциальной характеристикой,
18 - сумматор,
19 - пороговый элемент,
20 - формирователь порога,
21 - стробирующий элемент.
Предлагаемое устройство имеет следующие функциональные связи.
Вход устройства соединен с радиочастотными входами перемножителей 2, видеочастотные входы которых соединены с выходами блока регистров сдвига 1, входы которого подключены к выходу блока синхронизации 6 и к первому входу управляемого генератора псевдослучайной последовательности 7, выход которого соединен с другим входом блока регистра сдвига 1, выходы перемножителей 2 в каждом корреляционном канале через интеграторы 3 подключены к первым входам блоков частотно-временного преобразования сигнала 16, выходы которых подключены к соответствующим входам блока сравнения 14 через амплитудные детекторы 4 к блоку принятия решения и управления 5, первый и второй выходы которого подключены к первому и второму входу блока синхронизации 6, второй и третий выходы которого подключены к второму и третьему входам управляемого генератора псевдослучайной последовательности 7, а четвертый выход блока синхронизации 6 соединен с первым входом схемы сравнения 14. Выходы амплитудных детекторов 4 левого и правого корреляционных каналов центральной группы соединены с третьим и четвертым входами блока синхронизации 6, пятый выход которого подключен ко вторым входам блоков частотно-временного преобразования сигнала 16, третьи входы которых подключены к соответствующим выходам схемы сравнения 14, второй вход которой соединен с генератором эталонного напряжения 15, четвертые входы блоков частотно-временного преобразования сигналов 16 соединены с генератором сигнала смещения частоты 13, выходы амплитудных детекторов 4 каждого корреляционного канала подключены ко входам нелинейных элементов с экспоненциальной характеристикой 17, выходы которых подключены к соответствующим входам сумматора 18, выход которого подключен к первому входу пороговой схемы 19 и ко входу схемы формирования порога 20, выход которой соединен со вторым входом пороговой схемы 19, выход которой подключен к первому входу схемы стробирования 21, второй вход которой соединен с соответствующим входом блока принятия решения и управления 5 и шестым выходом блока синхронизации 6, пятый вход которого соединен с выходом схемы стробирования 21.
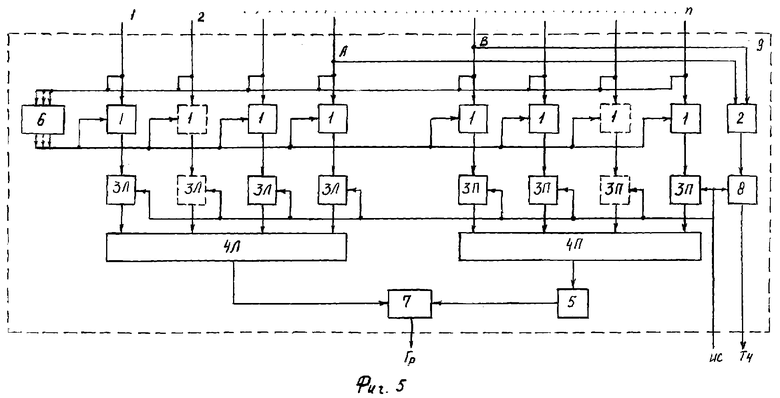
Для пояснения сущности работы предлагаемого устройства рассмотрим структуру и функции блока принятия решения и управления 5. Один из возможных вариантов его исполнения приведен на фиг.5, где введены следующие обозначения:
1 - пороговый элемент,
2 - блок сравнения,
3Л- стробирующий элемент левой группы,
3П -стробирующий элемент правой группы,
4Л - схема ИЛИ левой группы,
4П - схема ИЛИ правой группы,
5 - инвертор,
6 - блок формирования порога
7 - схема И,
8 - стробирующий элемент,
9 - блок принятия решения и управления.
Блок принятия решения и управления имеет следующие функциональные связи:
Сигнальные входы блока принятия решения и управления 9 (всего n входов, где n - число корреляционных каналов) соединены с первыми входами пороговых элементов 1 и с соответствующими входами блока формирования порога 6, выходы которого соединены со вторыми входами пороговых элементов 1, выходы левой группы которых соединены с первыми входами стробирующих элементов левой группы 3Л, выходы которых соединены со входами схемы ИЛИ левой группы 4Л; выходы правой группы пороговых элементов 1 соединены с первыми входами стробирующих элементов правой группы 3П, выходы которых соединены со входами схемы ИЛИ правой группы 4П, выход которой через инвертор 5 соединен с первым входом схемы И 7, второй вход которой соединен с выходом схемы ИЛИ левой группы 4Л; выход схемы И 7 идет во внешнюю цепь (по цепи Гр фиг.4); сигнальный вход А левой группы блока принятия решения и управления 9 и сигнальный вход В правой группы блока принятия решения и управления 9 подключены соответственно к первому и второму входам блока сравнения 2, выход которого подключен к первому входу стробирующего элемента 8, выход которого идет во внешнюю цепь (по цепи Тч фиг.4); второй вход стробирующего элемента 8 соединен со вторыми входами стробирующих элементов 3Л и 3П и идет во внешнюю цепь (по цепи ИС фиг.4),
Блок принятия решения и управления 9 (фиг.5) работает следующим образом.
Входные сигналы поступают на n входов блока принятия решения и управления 9 с выходов детекторов корреляционных каналов приемного устройства (с блоков 4 на фиг.4) и одновременно на вход блока формирования порога 6, в котором формируется пороговое напряжение для каждого порогового элемента 1 отдельно, которое пропорционально мощности сигналов в данном канале.
Пороговые напряжения с выходов блока 6 поступают на вторые входы пороговых элементов 1. В пороговом элементе 1 происходит сравнение мгновенного уровня входного сигнала с уровнем сформированного порога.
В моменты превышения порога сигналом на выходе порогового элемента 1 вырабатывается напряжение "лог 1", в остальное время на выходе поддерживается напряжение "лог 0". Далее выходные сигналы пороговых элементов стробируются импульсом считывания (ИС) в элементах 3Л и 3П каждого канала. На выход каждого стробирующего элемента 3Л и 3П пропускаются только те уровни "Лог 1", которые попадают в интервал импульса считывания. Это вызвано необходимостью обеспечения максимальной помехоустойчивости корреляционного канала, поскольку максимальное отношение сигнал/шум в канале достигается в конце интервала накопления (в этот момент и формируется ИС). Стробирующие элементы 3 объединены в две группы - левую и правую. Таким образом, корреляционные каналы условно делятся на две примерно равные группы. Это делается для обеспечения возможности определения знака грубой подстройки генераторов псевдослучайной последовательности в корреляционном приемнике, в состав которого и входит описываемый блок принятия решения и управления. Сигнал грубой подстройки для оценки фазы псевдослучайной последовательности (ПСП) формируется следующим образом. Выходы стробирующих элементов левой группы 3Л объединены левой схемой ИЛИ 4Л, а выходы стробирующих элементов правой группы 3П объединены правой схемой ИЛИ 4П. Таким образом, если в любом канале каждой из групп будет превышено пороговое напряжение в момент действия считывающего импульса ИС, то на выходе соответствующей схемы объединения (4Л или 4П) появится сигнал уровнем "Лог 1". Причем, если "Лог 1" появится на выходе левой схемы ИЛИ (а на выходе правой схемы будет в это время "Лог 0"), то оба сигнала, пройдя через схему И 7 и инвертор 5, сформируют сигнал грубой подстройки (Гр) в виде "лог 0". Для разных вариантов сочетаний сигналов на выходах схем объединения вид выходного сигнала грубой подстройки Гр приведен в таблице.
Случаи 1 и 4, приведенные в таблице, соответствуют неопределенности, вызванной либо отсутствием сигнала, либо появлению его сразу в двух группах корреляционных каналов. В случае наличия сигналов в обеих группах одновременно, возникшая неопределенность местоположения сигнала разрешается с помощью устройства формирования знака точной подстройки Тч генераторов ПСП. Этот сигнал формируется следующим образом. Сигналы с крайних, ближайших друг к другу, каналов правой и левой групп поступают на блок сравнения 2. В этом блоке они сравниваются по амплитуде, причем, если больше оказывается сигнал с левой группы, то на выходе блока сравнения 2 формируется сигнал уровнем "Лог 0", а если с правом - "Лог 1". Пройдя через стробирующий элемент 8, сигнал точной подстройки Тч поступает на выход блока принятия решения и управления 9.
Предлагаемое устройство (см. фиг.4) работает следующим образом. Входной шумоподобный сигнал подается на входы перемножителей 2, на другие входы которых подаются опорные псевдослучайные последовательности с блока регистров сдвига 1, сдвинутые друг относительно друга на длительность элементарного символа τ0 кодовой структуры ПСП. Выходные сигналы с выходов перемножителей 2 поступают на соответствующие интеграторы 3.
Полоса пропускания интеграторов 3 выбирается равной не менее полосы нестабильности несущей частоты входного шумоподобного сигнала, т.е. интегратор выполнен широкополосным. Однако, благодаря тому, что между интегратором 3 и амплитудным детектором 4 включен блок частотно-временного преобразования сигнала 16, то снижения помехозащищенности не происходит. Это эквивалентно повышению помехозащищенности по сравнению с устройством для ускорения поиска, у которого полоса интегратора при наличии нестабильности несущей частоты входного шумоподобного сигнала расширяется на величину полосы этой нестабильности для осуществления поиска. Сигнал с выходов блоков частотно-временного преобразования сигналов 16 поступает на амплитудные детекторы 4, в которых выделяется огибающая, и далее на нелинейные элементы с экспоненциальной характеристикой (всего n элементов 17) и блок принятия решения и управления 5. Проходя через нелинейный элементы 17, сильные сигнальные отклики подчеркиваются по амплитуде относительно слабых помеховых, т.е. происходит изменение соотношения амплитуд в пользу более сильных сигнальных откликов. Нелинейные элементы могут быть выполнены по схеме, приведенной в книге "Полупроводниковая схемотехника". У.Титце, К.Шенк, М.: Мир, 1983, с.150. Далее сигнал поступает на входы n-входового сумматора 18, на выходе которого амплитуда суммарного отклика определяется в основном сигнальными откликами и при изменении задержки входного сигнала относительно опорных будет изменяться в незначительных пределах, а это приводит к минимуму потерь энергии сигнала при обнаружении.
В конце каждого интервала времени накопления с блока синхронизации 6 формируется и подается на блок принятия решения и управления 5 импульс считывания (ИС), в котором происходит считывание максимального отклика, а на блок частотно-временного преобразования сигнала 16 импульс гашения (ИГ), передний фронт которого совпадает с задним фронтом импульса считывания. Длительности импульсов считывания и гашения соответствуют длительности времени линии задержки в блоке частотно-временного преобразования сигналов 16. В момент прихода импульса гашения на блок 16 кольцо обратной связи в этом блоке разрывается и происходит подготовка блока частотно-временного преобразования сигналов 16 к новому интервалу накопления.
На блок частотно-временного преобразования сигналов 16 подается сигнал генератора смещения частоты 13. Для увеличения динамического диапазона блока 16 используется система АРУ. На схему сравнения 14 поступает сигнал постоянного уровня с генератора эталонного напряжения 15 на другие входы сигналы со всех линеек блока частотно-временного преобразовании сигналов 16. Происходит выравнивание коэффициентов передачи во всех корреляционных линейках. В момент обнаружения сигнала с блока синхронизации 6 поступает сигнал, которым разрывается кольцо АРУ и запрещается изменение коэффициента передачи в основном тракте до выхода из синхронизации, т.е. прекращается поступление управляющего напряжения АРУ на блоки частотно-временного преобразования сигналов 16 во всех линейках одновременно. Таким образом, в момент приема входного шумоподобного сигнала, коэффициенты передачи во всех линейках остаются приблизительно одинаковыми.
В предлагаемом устройстве отклики с выходов корреляционных каналов подвергаются нелинейному преобразованию в n-канальных нелинейных элементах с экспоненциальными характеристиками и затем суммируются в n-входовом сумматоре. Если сигнал содержится в анализируемой области неопределенности, то на выходе одного из корреляторов отклик будет максимален, а на выходе соседнего с ним корреляционного канала отклик будет по величине близок к максимальному, в то время как на выходах остальных корреляторов будут наблюдаться помеховые отклики, амплитуды которых меньше амплитуд сигнальных откликов. На выходе n-входового сумматора соотношение амплитуд сигнальных и помеховых откликов уменьшается в пользу более сильных сигнальных откликов. Слабые, помеховые отклики за счет нелинейного преобразования значительно ослабляются. На выходе n-входового сумматора амплитуда отклика определяется в основном сигнальными откликами и при изменении задержки входного сигнала относительно опорных будет изменяться в незначительной степени. Это приводит к полному использованию всей энергии сигнала при обнаружении.
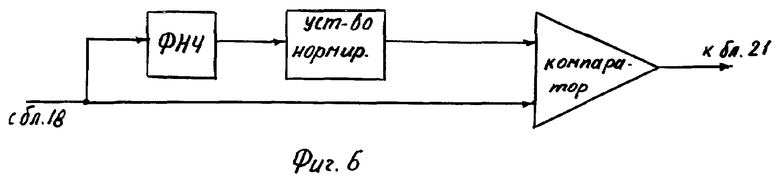
Сигнал с выхода n-входового сумматора 18 поступает на пороговый элемент 19 и формирователь порога 20. На фиг.6 показана схемная реализация блоков 19 и 20.
Время интегрирования в ФНЧ выбирается, из условия вычисления с максимальной точностью энергии суммы. Сверху это время ограничивается временной диаграммой поиска ШПС. Практически это время выбирается Т=Тнак. Погрешность вычисленной энергии при этом будет пренебрежительно мала. Устройство нормировки задает уровень порога на компараторе пороговой схемы 19. Коэффициент нормировки практически определяется уровнем вероятности "ложной тревоги", устанавливаемой, исходя из требуемых характеристик обнаружения приемного устройства. В пороговом элементе 19 происходит сравнение суммы нелинейно преобразованных корреляционных откликов с порогом обнаружения и принимается решение об обнаружении сигнала. Выходной сигнал блока 19 стробируется импульсом считывания (ИС) в стробирующем элементе 21. На выход стробирующего элемента 21 пропускаются только те импульсы с выхода блока 19, которые попадают в интервал импульса считывания.
Таким образом, если превышен порог обнаружения в пороговом элементе 19, то на блок синхронизации 6 подается сигнал обнаружения "0" с выхода стробирующего элемента 21. Устройство переходит в режим слежения за задержкой.
В случае отсутствия превышения порога в пороговом элементе 19, сигнал управления "0" на выходе стробирующего элемента 21 отсутствует, что является разрешением для блока синхронизации 6 к перестройке фазы управляемого генератора псевдослучайной последовательности 7 на n·τ0. Таким образом осуществляется поиск шумоподобного сигнала в i-ой зоне длительностью n·τ0. Цикл поиска входного шумоподобного сигнала повторяется для следующего сигнала i+1 интервала и т.д. до тех пор, пока не пройдет просмотр всего периода или всех фаз шумоподобного сигнала.
В момент превышения порога сигналов, как было отмечено выше, на выходе стробирующего элемента 21 вырабатывается сигнал 0, которым запрещается перестройка управляемого генератора ПСП на n·τ0, одновременно формируется в блоке принятия решения и управления 5 сигнал Гр, по которому блок синхронизации меняет фазу управляемого генератора ПСП7, осуществляя подстройку фазы по τ0 до тех пор, пока сигнал не окажется в центральном канале. При появлении сигнала в центральном канале блок принятия решения и управления 5 вырабатывает сигнал точной подстройки Тч, согласно которому блок синхронизации прекращает подстройку по τ0 и включает точную подстройку по фазе τ0/K (где K - целое число) по управляющим сигналам В и С, которые поступают с левого и правого каналов центральной группы.
Процесс синхронизации в предлагаемом устройстве по сравнению с прототипом имеет следующую особенность: в процессе поиска сигнала по точкам неопределенности его функции корреляции, решение об остановке перестройки и начале перепроверки принимается по вновь вводимой цепи формирования сигнала обнаружения 0, а уточнение фазы ПСП и точная подстройка генератора осуществляется с помощью сигналов Гр и Тч, формируемых блоком принятия решения и управления. Таким образом основной полезный эффект предлагаемого устройства заключается в большей помехоустойчивости при формировании сигнала остановки перестройки. Для того чтобы реализовать это преимущество, уровень порога в блоке принятия решения и управления должен быть ниже, чем в цепи формирования сигнал 0 на величину выигрыша, который обеспечивает введение принятой процедуры обнаружения.
Оценим эффективность предлагаемого изобретения.
В предлагаемом устройстве применено формирование общего выходного сигнала каналов обнаружения и уравнения его с порогом в отличие от прототипа, где с порогом сравнивается выходное напряжение одного канала обнаружения. Это дает возможность избавиться от энергетических потерь, отмеченных ранее в разделе критики прототипа.
Из теории оптимальных методов радиоприема сигналов известно, что в случае сложного бинарного обнаружения, или обнаружения передачи одного из n сигналов Si, i=1...n безотносительно того, какой из сигналов передается, наилучшей статистикой обнаружения является статистика, равная сумме отношений правдоподобия для каждого из сигналов
(см. Гуткин А.С. Теория оптимальных методов радиоприема при флуктуационных помехах. М.: Советское радио, 1972 г., стр.149-150).
В свою очередь, известны также выражения для статистик отношения правдоподобия для различных моделей сигналов. Поскольку в условиях работы прототипа и предлагаемого устройства осуществляется некогерентный прием флуктирующих по амплитуде сигналов, то с достаточной степенью точности можно использовать выражение для отношения правдоподобия сигналов с неизвестной фазой и амплитудой флуктирующей по закону Релея, в виде
В свою очередь, величина ψi представляется выражением

где Sопорн.i - опорный сигнал,
x(t) - входной сигнал плюс шум,
Q - энергия сигнала,
N0 - спектральная плотность шума,
L - символ огибающей.
 - отношение сигнал/помеха
- отношение сигнал/помеха
(см. Фалькович С.Е. Прием радиолокационных сигналов на фоне флуктуационных помех", М. Советское радио, 1961, стр.59).
Из выражения для отношения правдоподобия видно, что выходные сигналы корреляционных каналов, продетектированные с помощью квадратичных детекторов, необходимо умножить на некоторый масштабирующий коэффициент. Умножение на коэффициент технически реализуется в виде использования аттенюатора на выходе квадратичного детектора, а затем полученный сигнал необходимо передать через нелинейный элемент с экспоненциальной характеристикой. Полученные сигналы суммируются, результирующий сигнал будет обеспечивать наивысшее качество характеристик обнаружения, т.е. минимум вероятности пропуска сигнала.
Однако эта схема формирования сигнала получена для случая сложного бинарного обнаружения, когда известно, что передается лишь один из группы n сигналов. В условиях работы прототипа на выходах n каналов обнаружения наблюдаются сигнальные отклики для двух каналов, что эквивалентно случаю обнаружения двух сигналов из группы n сигналов. Оптимальной структуры обнаружителя для этого случая в литературе не известно. Однако применение известного алгоритма, описанного в книге: Гуткин Л.С. Теория оптимальных методов радиоприема при флуктуационных помехах. М.: Сов. радио, 1972 с.149-150, для этого случая дает результаты обнаружения лучше, чем у прототипа.
Препятствием на пути прямого использования отношений правдоподобия в реальных схемах является неопределенность параметра отношения сигнал/помеха q2, которое определяет масштабный коэффициент квадратичного детектора. Поскольку до момента обнаружения сигнала измерение отношения сигнал/помех лишено практического смысла, то в предложенном устройстве применен метод выбора оптимального значения масштабного коэффициента квадратичного детектора для минимального порогового значения отношения сигнал/помеха q2.
Значение q2 пор является одним из параметров устройства, определяющим качество работы всей системы.
Поскольку максимальная вероятность пропуска сигнала соответствует минимальному значению q2, то наиболее целесообразно оптимизировать параметры системы обнаружения для минимальных q2.
При сильных сигналах, обеспечивающих большое значение q2, предлагаемая схема будет проигрывать оптимальной, в которой значение масштабного коэффициента квадратичного детектора должно быть другим. Однако этот проигрыш не так существенен, поскольку качество обнаружения будет и так достаточно высоким благодаря большому соотношению сигнал/помеха.
Таким образом, заявляемые признаки: n канальные нелинейные элементы с экспоненциальной характеристикой, n - входовый сумматор, пороговый элемент, формирователь порога, стробирующий элемент позволили повысить помехозащищенность обнаружения шумоподобного сигнала.
Признак является необходимым и достаточным для получения требуемого положительного эффекта.
При дополнительном поиске, проведенном авторами в соответствии с п.52 Э3-1-74, не обнаружены объекты со сходными признаками отличительной части. Учитывая это, авторы считают, что предлагаемое решение отвечает критерию "существенные отличия".
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1985 |
|
SU1840083A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1979 |
|
SU1840116A2 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1980 |
|
SU1840270A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1976 |
|
SU1840434A1 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1978 |
|
SU1840170A1 |
| УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ШУМОПОДОБНЫМ СИГНАЛОМ | 1979 |
|
SU1840322A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ШУМОПОДОБНОГО СИГНАЛА | 1975 |
|
SU1840645A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1978 |
|
SU1840096A1 |
| УСТРОЙСТВО ПОИСКА СИГНАЛА СИНХРОНИЗАЦИИ СПУТНИКОВОЙ СИСТЕМЫ СВЯЗИ | 1995 |
|
RU2093963C1 |
| УСТРОЙСТВО ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА | 1980 |
|
SU1840288A1 |
Изобретение относится к области радиосвязи и может быть использовано в радиолокационных, радионавигационных и связных системах с шумоподобными сигналами при наличии нестабильности несущей частоты. Техническим результатом изобретения является повышение помехоустойчивости обнаружения шумоподобного сигнала. Для чего в устройство дополнительно введены n канальных нелинейных элементов с экспоненциальной характеристикой, n-входовый сумматор, пороговый элемент, формирователь порога, стробирующий элемент, причем выходы амплитудных детекторов каждого корреляционного канала подключены ко входам нелинейных элементов, выходы которых подключены к соответствующим входам сумматора, выход которого подключен к первому входу пороговой системы и ко входу схемы формирования порога, выход которой соединен со вторым входом пороговой схемы, выход которой подключен к первому входу схемы стробирования, второй вход которой соединен с шестым выходом блока синхронизации. 6 ил.
Устройство поиска шумоподобного сигнала, содержащее блок регистров сдвига, n групп корреляционных каналов, каждая из которых состоит из последовательно соединенных перемножителя, интегратора, блока частотно-временного преобразования и амплитудного детектора, блок синхронизации, генератор сигнала смещения частоты, генератор эталонного напряжения, блок сравнения, управляемый генератор псевдослучайной последовательности, блок принятия решения, первый и второй выходы которого соединены с первым и вторым входами блока синхронизации, первый выход которого соединен с соответствующими входами блока регистров сдвига и первым входом управляемого генератора псевдослучайной последовательности, выход которого соединен с соответствующим входом блока регистров сдвига, а второй и третий его входы соединены соответственно со вторым и третьим выходами блока синхронизации, четвертый выход которого подключен к первому входу блока сравнения, второй вход которого соединен с выходом генератора эталонного напряжения, при этом соответствующие входы блока принятия решения подключены к соответствующим выходам амплитудных детекторов каждого канала, пятый выход блока синхронизации соединен со вторыми входами блоков частотно-временного преобразования, выход генератора смещения частоты подключен к третьим входам блоков частотно-временного преобразования каждого канала, четвертые входы которых соединены с выходом блока сравнения, третий вход которого подключен ко входам амплитудных детекторов каждого канала, четвертый и пятый выходы блока синхронизации соединены выходами амплитудных детекторов соответствующих каналов, шестой выход блока синхронизации соединен с соответствующим входом блока принятия решения, выход управляемого генератора псевдослучайной последовательности подключен к соответствующему входу блока регистров сдвига, соответствующие выходы которого соединены со вторыми входами перемножителей каждого канала, вторые входы которых подключены ко входу устройства, отличающееся тем, что, с целью повышения помехоустойчивости, в него введены последовательно соединенные сумматор, пороговый узел и узел стробирования, а также формирователь порога, выход которого соединен со входом порогового узла, а вход соединен с выходом сумматора и n нелинейных элементов, по числу каналов, входы которых подключены к выходам амплитудных детекторов каждого канала, а выходы объединены и подключены ко входу сумматора, причем выход стробирующего узла соединен с выходом блока синхронизации, а второй его вход соединен с шестым выходом блока синхронизации.
| Авт.св | |||
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНОГО СИГНАЛА | 1980 |
|
SU1840270A1 |

