(54) ДИНАМИЧЕСКИЙ СПОСОБ ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК ПРЕОБРАЗОВАТЕЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения отношения двух напряжений | 1980 |
|
SU983562A1 |
| Устройство для измерения отношения двух напряжений | 1983 |
|
SU1147991A1 |
| Устройство для измерения отношения двух напряжений | 1982 |
|
SU1099287A1 |
| Динамический способ линеаризации характеристик преобразователя | 1979 |
|
SU781575A1 |
| Цифровой измеритель температуры | 1981 |
|
SU949351A1 |
| Цифровой измеритель температуры | 1984 |
|
SU1224609A1 |
| Устройство для измерения отношения двух напряжений | 1980 |
|
SU1018032A1 |
| Устройство для измерения постоянной времени | 1987 |
|
SU1504626A1 |
| Устройство для измерения температуры | 1976 |
|
SU609066A1 |
| Способ аналого-цифрового преоб-РАзОВАНия и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU839050A1 |
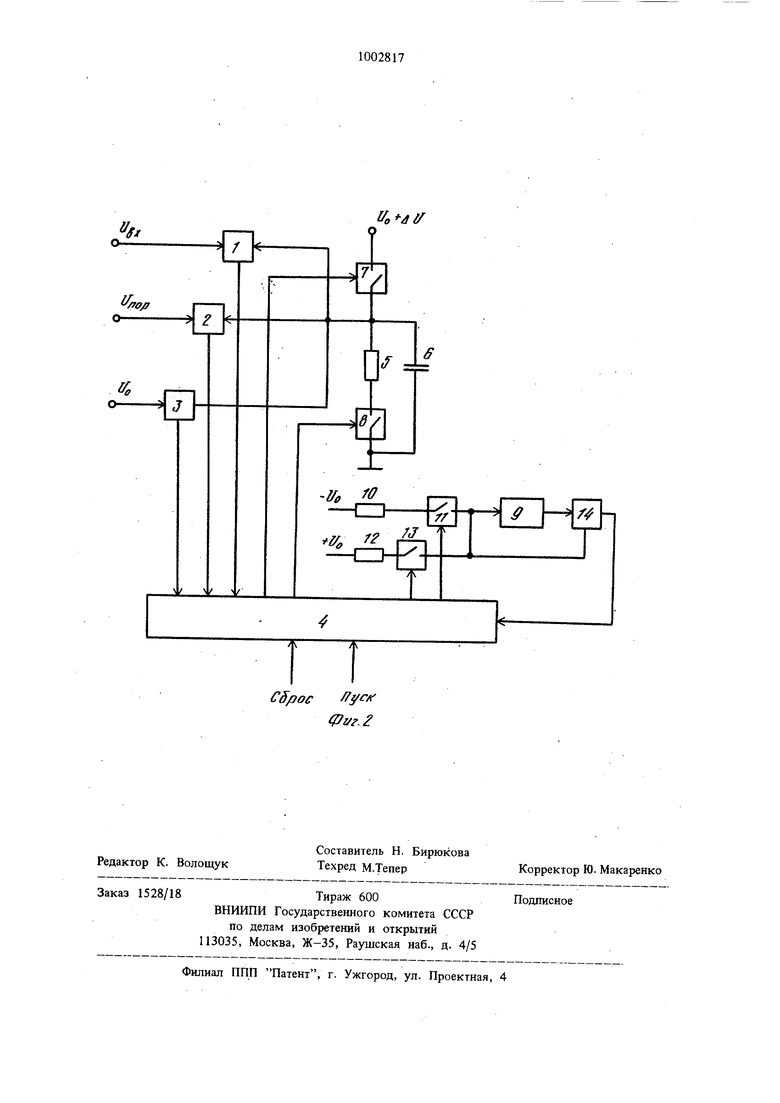
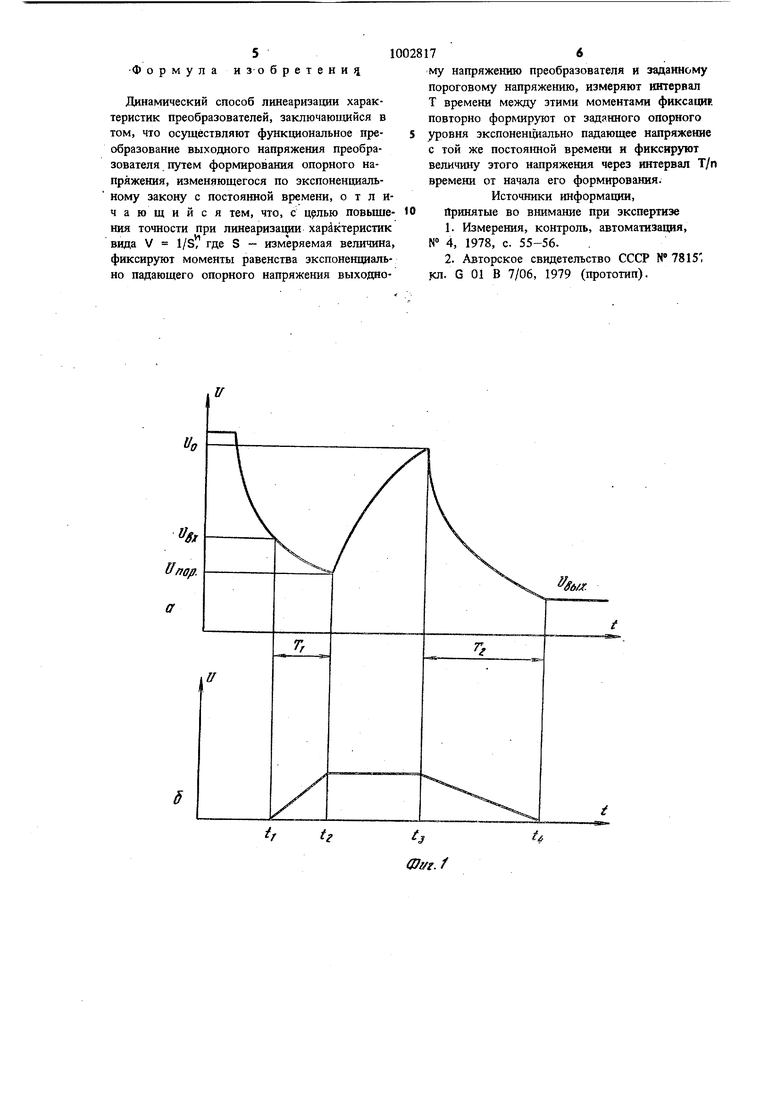
Изобретение относится к электрическим измерениям неэлектрических величин и может быть использовано при измерении толщины крупногабаритных объектов преобразователями, контактирующими с поверхностью объект контроля. Известен динамический способ линеаризации характеристик преобразователей, заключающийся в том, что заранее измеренный, сигнал преобразователя и известный опорный сигнал измеряют, начиная .с заданного момента времени, по экспоненциальному закону с разными постоянными времени, причем первы из них - до заданного значения, и фиксируют интервал времени между моментом возбуж дения переходного процесса и моментом достижения заданного уровня 1 . В известном способе преобразование осуществляют на начальном участке экспоненты. Входной величиной преобразователя может бы любой физический параметр, воздействующий на индуктивный, емкостной или резистнвный датчики, линейно преобразуемый в интервал времени. Однако, если между измеряемым физическим параметром и варьируемым параметром преобразователя, будет нелинейная зависимость, то окажется нелинейной и зависимость между йэмеряемым физическим параметром и интервалом времени, что является недостатком известного способа. Кроще того, в ряде случаев удобно использовать не интервал времени, а аналоговый выходной сигнал в виде напряжения. Наиболее близким по технической сущности к данному изобретению является динамический способ }шнеа1жзации характеристик преобразователей, заключающийся в том, что осуществляют функциональное преобразование выходного напряжения преобразователя путем формирования опорного напряжения, изменяющегося по экспоненциальному закону с постоянной времени (2. Недостаток известного способа состоит в низкой точности йреобразования, вызванной нестабильностью соотнощення между постояиными времени экспоненциально падающих сигналов. Цель изобретения - повышение точности при линеаризации характеристик вида V 1/S где S - измеряемая величина. Цель достигается тем, что согласно динамическому способу линеаризации характеристик преобразователей фиксируют моменты равенства экспоненциально падающего опорного напряжения выходному напряжению преобразователя и заданному пороговому напряжению, измеряют интервал Т времени между этими моментами фиксации, повторно формируют от заданного опорного уровня экспоненциально падающее напряжение с той же постоянной времени и фиксируют величину этого напряжения через интервал Т/п времени от начала его формирования. На фиг. 1 представлена временная диаграмма, поясняющая динамический способ линеаризации характеристик преобразователей: а - цикл экспоненциально падающего опорного напряжения, б - процесс измерения и отсчета времени; на фиг. 2 - блок-схема устройства, реализующего описанный способ. Устройство содержит нуль-органы 1, 2 н 3, выходы которых подключены к входам бло|Ка 4 управле1шя, а первые входы соединены 1с источниками соответственно входного напряжения преобразователя UBX порогового UjjQp и опорного Ug напряжений. Ко вторым входа нуль-органов 1, 2 и 3 подключена RC-цепь, CO стоящая из резистора 5 и конденсатора 6, которая через ключ 7 подключена к источнику опорного напряжения UQ + AU. Резистор 5 через ключ 8 и конденсатор 6 заземлен. К входу интегратора 9 подключены через резистор 10 и ключ И источник отрицательного опорного напряжения -Up, через резистор 12 и ключ 13 - ИСТО1ШИК положительного опорн го напряжения +UQ а также первый выход нуль-органа 14, второй выход которого соединен с входом блока 4 управления, а вход - выходом интегратора 9. Все управляющие . входы ключей 7, 8, 11 и 13 соединены с выходами блока 14 управления, к управляющим входам которого подключены источники сигна лов Пуск и Сброс для запуска устройств и приведения его в исходное состояние. Динамический способ линеаризации характеристик преобразователей осуществляется следующим образом. В исходном состоянии ключ 7 замкнут, ключи 8, Ни 13 разомкнуты. Напряжение на конденсаторе 6 равно UQ + Ди, нуль-орган 14 поддерживает на выходе интегратора 9 напряжение, близкое к нулю. Блок 4 управления обеспечивает следующую пос;1едовательность действий элементов устройства: замыкается ключ 8, размыкается ключ 7, напряжение на конденсаторе 6 начинает экспоненциально падать с постоянной времени Ъ RC. Нуль-орган 1 фиксирует момент равенства экспоненциально падающего напряжения входному напря жению преобразователя Ugx при этом замыкается ключ 11, и напряжение на выходе интегратора 9 начинает линейно расти в результате заряда конденсатора интегратора постоянными током (момент tj на фиг. 1). Нульорган 2 фиксирует момент равенства экспоненциально падающего напряжения пороговому напряжению UjjQp при этом ключи 8 и 11 размыкаются, а ключ 7 замыкается (момент tj на фиг. 1). В результате этого напряжение на конденсаторе 6 начинает расти к уровню UQ + Ди, а напряжение на выходе интегратора 9 с момента tj остается неизменным. Нуль-орган 3 фиксирует момент равенства экспоненциально растущего напряжения уровню UQ при этом ключ 7 размыкается, ключи 8и 13 замыкаются (момент фиг. 1) в результате чего на конденсаторе 6 повторно запускается экспоненциально падающее опорное напряжение от постоянного опорного начального уровня UQ конденсатор интегратора 9начинает разряжаться постоянным током обратного знака, в связи с чем напряжение На выходе интегратора 9 начинает уменьщаться с постоянной, скоростью. Когда напряжение на выходе интегратора 9 достигает н лесрабатывает нуль-орган 14 и вого уровня ключи 8, 13 размыкаются. В этот момент (момент t4 на фиг. 1) по значению напряжения на конденсаторе 6 определяют значеНапряжение на конние измеренной величины, денсаторе 6 Ugj,jj будет К IXC пэти - где К УС о пор; п К,/К,; Кз, KI - соответственно коэффициенты преобразования времени в физическзто величину и наоборот; S - измеряемая величина, например толщина. Таким образом, по величине напряжения -вых зафиксированного в момент времени Ti/n при втором формировании экспоненциально падающего опорного напряжения, определяют изменяемую величину S, связанную нелинейной зависимостью Ug -f-tr с выходным напряжением Ugj рассматриваемого преобразователя. Предлагаемый способ позволяет повысить точность линейных преобразований путем исключения погрещности нестабильности постоянной времени экспоненциально падающего опорного напряжения. Формула и 30 бретени Динамический способ линеаризации характеристик преобразователей, заключающийся в том, что осуществляют функщюнальное преобразование выходного напряжения преобразователя путем формирования опорного напряжения, изменяющегося по экспоненциальному закону с постоянной времени, отличающийся тем, что, с повышения точности при лннеаризащш характеристик вида V l/S где S - измеряемая величина, фиксируют моменты равенства зкспонешдаально падающего опорного напряжения выходноV. 10 7 му напряжению преобразователя и заданному пороговому напряжению, измеряют интервал Т времени между этими моментами фиксаци. повторно формируют от заданного опорного уровня экспоненвдально падающее напряжение с той же ПОСТОЯШ10Й времени и фиксируют величину этого напряжения через интервал Т/п времени от начала его формирования. Источники информации. Принятые во внимание при зкспертиэе 1.Измерения, контроль, автоматизация, № 4, 1978, с. 55-56. 2.Авторское свидетельство СССР № 7815 foi. G 01 В 7/06, 1979 (прототип).
Т т
Сброс ffy г/гIfo lf
