(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ЯКОРЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для допускового контроля параметров | 1982 |
|
SU1086407A1 |
| Устройство для защиты трехфазных сетей от изменения чередования и обрыва фазы | 1980 |
|
SU884027A1 |
| УМНОЖИТЕЛЬ ЧАСТОТЫ СЛЕДОВАНИЯ ПЕРИОДИЧЕСКИХ ИМПУЛЬСОВ | 1972 |
|
SU425315A1 |
| Устройство для измерения индикатрис рассеяния света | 1990 |
|
SU1723456A1 |
| Система управления сварочной машиной | 1989 |
|
SU1683929A1 |
| Устройство для измерения углубления долота при бурении глубоких скважин | 1982 |
|
SU1040126A1 |
| Релейно-импульссный регулятор тока электродвигателя транспортного средства | 1980 |
|
SU895748A1 |
| Устройство для автоматического контроля системы управления тиристорным преобразователем | 1988 |
|
SU1613372A1 |
| Релейно-импульсный регулятор тока электродвигателя | 1981 |
|
SU964941A1 |
| Измеритель частоты | 1989 |
|
SU1691768A1 |
1
Изобретение относится к технике контроля и регулирования и может .быть использовано для измерения скорости в системах регулирования, стабилизации и индикации скорости.
В настоящее время наиболее широко используются для измерения скорости различного рода датчики и. устройства, подключенные к двигателям 1 и 2.
Однако данные устройства требуют механической связи с контролируемым объектом.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для контроля скорости двигателд, в котором с разделительного трансформатора из цепи, питающей якорь двигателя постоянного тока, на вход формирователя (вход устройства) поступают пульсации переменного тока. Выход формирователя соединен с входом запоминающего устройства, выходная цепь которого связана со схемой индикации скорости. На вход блока синхронизации поступает двухполупериодное выпрямленное переменное на пряжение. Выход этого блока соединен с входом таймера, выходная цепь которого связана с управляющим входом одновибратора. Один выход одно jj вибратора подключен к цепи переноса счетчика импульсов запоминающего устройства, а другой - к выходной цепи устройства обновления информации, причем выход последнего соединен с входом очистки запоминающего устрой15ства.
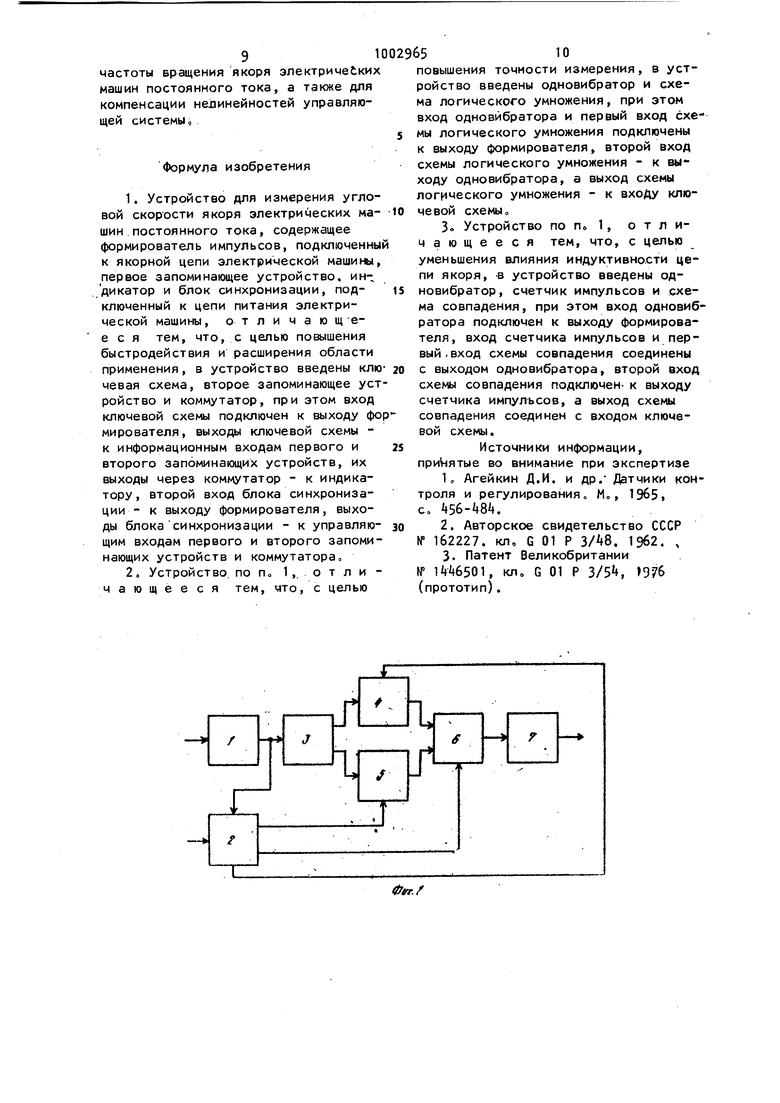
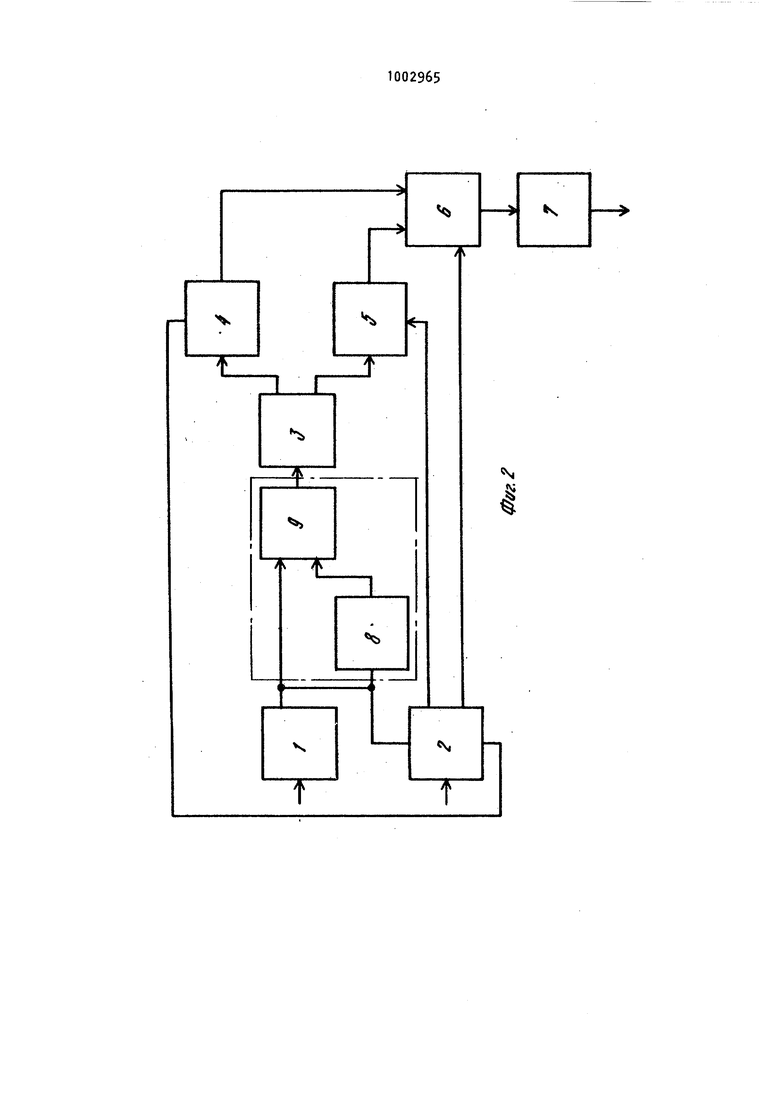
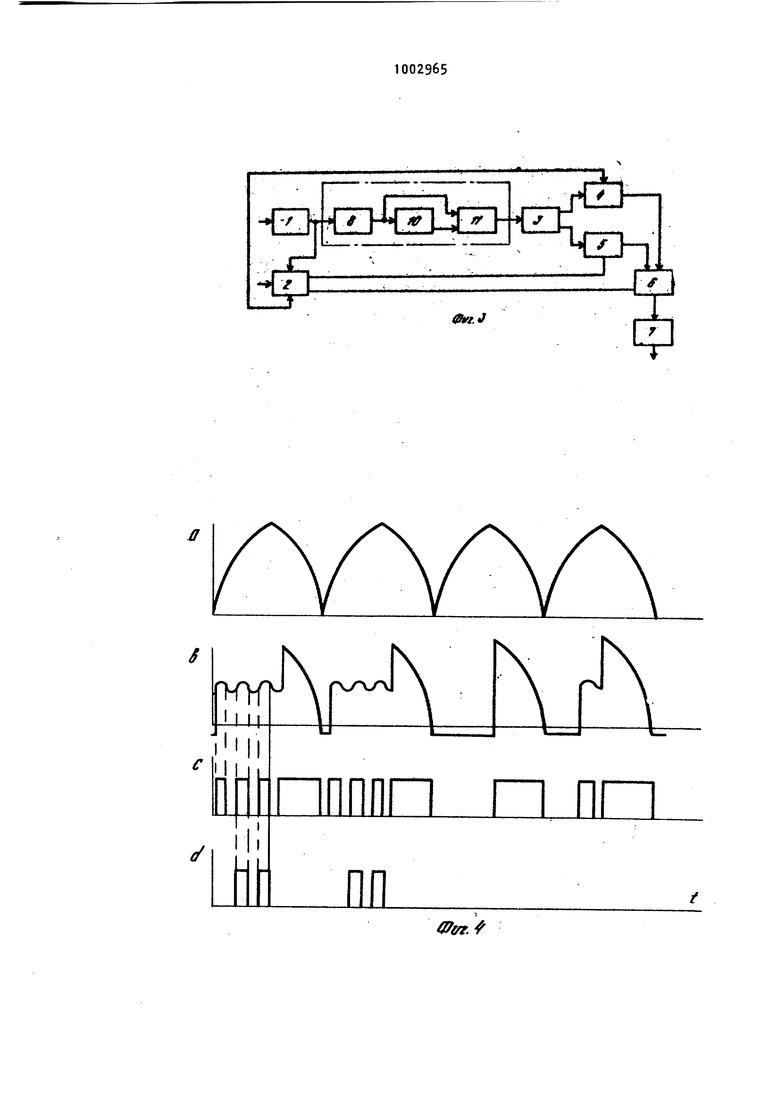
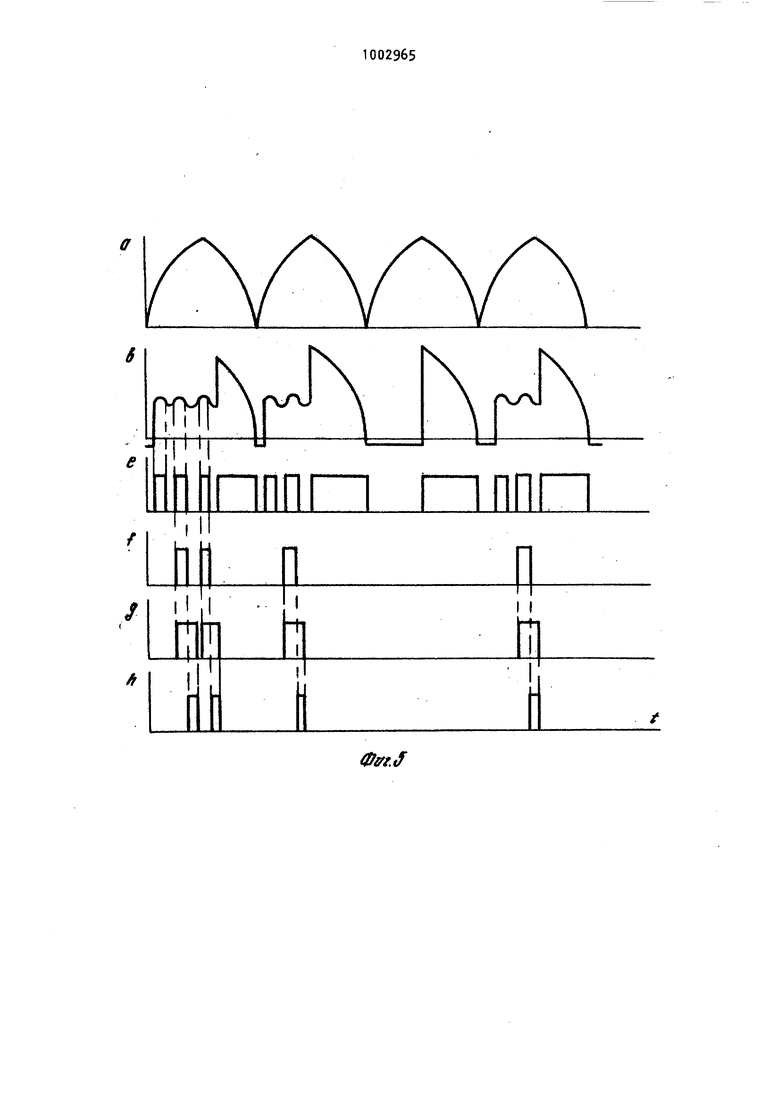
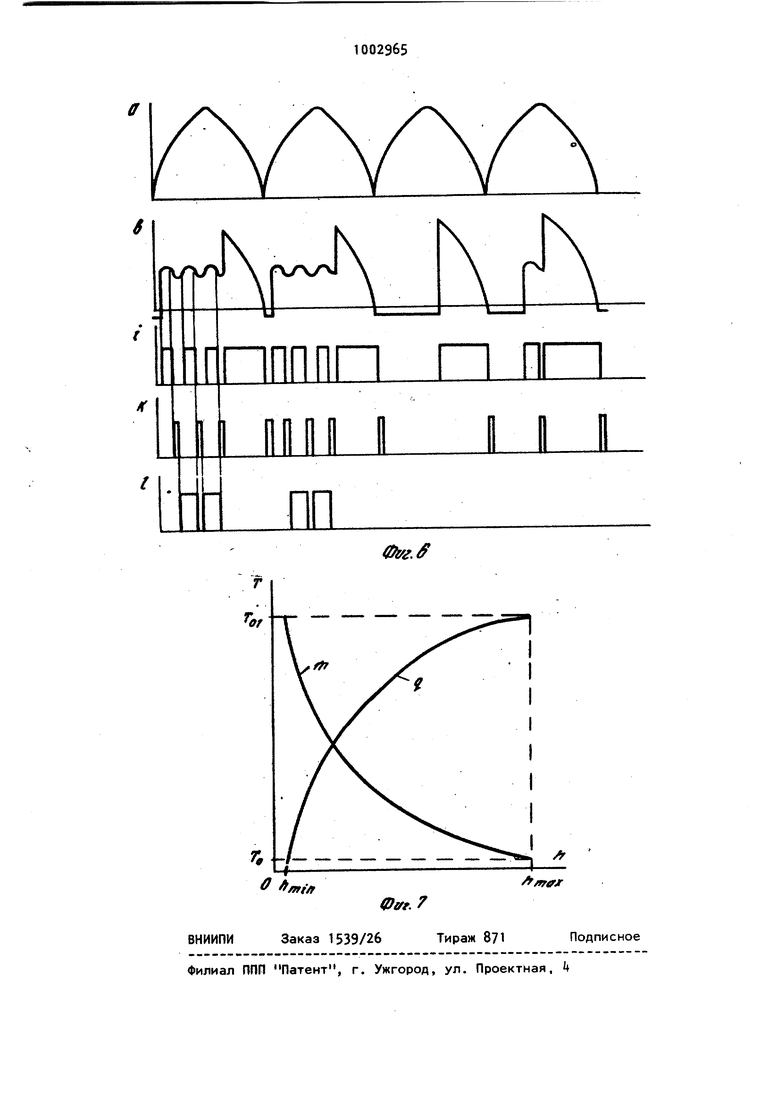
. Датчик позволяет измерять и индицировать интегральное значение угло20вой скорости якоря двигателя постоянного тока, при этом запаздывание в системе измерения может составлять от 1 до 9с СЗ. Недостатками устройства являются невысокая точность измерения угловой скорости из-за размагничивающего дей ствия реакции якоря (преимущественно для электрических машин малой мощности), низкое быстродействие из-за большого периода измерения угловой скорости, узкая область применения из-за большого запаздывания в системе измерения, что исключает его использование в устройствах автоматического управления для регулирования и стабилизации угловой скорости. Целью изобретения является повышение быстродействия, точности измерения и расширение области применения. Поставленная цель достигается тем, что в устройство, содержащее фо мирователь импульсов, подключенный к якорной цепи электрической машины, первое запоминающее устройство, индикатор и блок синхронизации, подключенный к цепи питания электрической машины, введены ключевая схема, второе запоминающее устройство и ком мутатор, при этом вход ключевой схемы подключен к выходу формирователя, выходы ключевой схемы - к информацио ным входам первого и второго запоминающих устройств, их выходы через ко мутатор подключены к индикатору, вто рой вход блока синхронизации подключен к выходу формирователя, выходы блока синхронизации - к управляющим входам первого и второго запоминающи устройств и коммутатора Причем в устройство введены одновибратор и схема логического умножения , при этом вход одновибратора и первый вход .схемы логического умноже ния подключены к выходу формировател второй вход схемы логического умножения - к выходу одновибратора, а выход схемы логического умножения к входу ключевой схемы„ Кроме того, с целью уменьшения вл яния индуктивности цепи якоря в устройство введены одновибратор, счетчи импульсов и схема совпадения, при этом вход одновибратора подключен к выходу формирователя, вход счетчика импульсов и первый вход схемы совпадения соединены с выходом одновибратора , второй вход схемы совпадения подключен к выходу счетчика импульсо а выход cxeNW совпадения соединен с входом ключевой схемы. На фиг„ 1 представлена структурная схема устройства для измерения угловой скорости якоря электрическихмашин постоянного тока; на фиг. 2 и 3 структурные схемы модификаций этого устройства, на фиг, j-t - диаграммы работы отдельных узлов устройства, на фиго 7 зависимости, поясняющие принципы построения устройства и отдельных его блоков Устройство (фиг 1) содержит формирователь 1 импульсов, выход которого соединен с входом блока 2 синхронизации и входом ключевой схемы 3« Одна выходная цепь ключевой схемы 3 связана с информационным входом запоминающего устройства А, а другая - с информационным входом запоминающего устройства 5« Выход запоминающего устройства 4 подключен к одному входу коммутатора 6, а выходная цепь запоминающего устройства 5 соединена с другим входом коммутатора 6, выход которого связан с входом блока 7 индикации. При этом один выход блока 2 синхронизации соединен с управляющим входом запоминающего устройства 4, второй - с разрешающим входом коммутатора 6 и третий - с управляющим входом запоминающего устройства 5 Устройство (фиго 2) дополнительно содержит одновибратор 8 и схему 9 логического умножения, которые включены между формирователем 1 импульсов и ключевой схемой Зо При этом выход формирователя 1 импульсов соединен с входами блока достоверности информации, одновибратора 8 и схемы 9 логического умножения Выходная цепь одновибратора В связана с другим входом схемы 9 логического умножения, выход которой подключен к входу ключевой схемы 3. Устройство (фиГо 3) дополнительно содержит одновибратор 8, счетчик 10 импульсов и схему 11 совпадения, которые включены между формирователем 1 импульсов и ключевой схемой 3 При этом выход формирователя 1 импульсов соединен с входами блока 2 синхронизации и одновибратора 8. Выходная цепь одновибратора 8 связана с входом счетчика 10 импульсов и одним входом схемы П совпадения. Выход счетчика 10 подключен к другому входу схемы 11 совпадения, выходная цепь которой соединена с входом ключевой схемы 3 Устройство (фиг, 1) работает сле дующим образом. На йход формирователя 1 импульсо подается напряжение с зажимов якоря электрической машины постоянного тока (фиг. t в). Оно включает в себя переменную составляющую зубцовых Пульсаций противо-ЭДС. С помощью фо мирователя 1 импульсов этот сигнал преобразуется в импульсы прямоуголь ной формы (фиго t с), после чего поступает на входы блока 2 синхронизации и ключевой схемы 3 Для определения полных импульсов зубцовых пульсаций на другой вход блока синхронизации подается двухполупериодное выпрямленное напряжение (фиг. 4 а). ЗубЦовые пульсации противо-ЭДС не синхронизированы с частотой питающей сети и определяются средним значением напряжения на якоре двигателя и моментом нагрузки на валу якоря, а также индуктивностью якорной цепи (фиг. в). Информация о частоте вращения якоря содержится и однозначно определяется длительностью импульсов зубцовых пульсаций противо-ЭДС, которая может быть искажена или отсутствовать вообще при кратковременных перегрузках электрической машины. Необходимые данные об угловой скорости якоря в данном полупериоде питающего напряжения могут быть получены лишь при условии, если имеется по крайней мере три импульса зубцовых пульсаций, то да длительность среднего импульса однозначно определяет частоту вращения якоря в текущий момент времени Чтобы исключить потерю информации блок 2 синхронизации по заднему фронту первого импульса с формирователя 1 в данном полупериоде питающего напряжения вырабатывает разрешающий сигнал, который поступает на управляющий вход запоминающего устройства или запоминающего устройства 5 в зависимости от ситуации, сложившейся в данный момент времени. Т«е. если в предыдущем полупериоде достоверная информация посре ством ключевой схемы 3 и разрешающего сигнала из блока 2 синхронизации была записана в запоминающем устройстве А, то длительность следующего импульса зубцовой пульсации заносится в запоминающее устройство 5. Данные на выходе блока 7 индикации соответствуют длительности импульса,, записанной в запоминающем устройстве . Обновление информации производится лишь по команде на управляющий вход запоминающего устройства k из блока 2 синхронизации после того, как определяется передний фронт следующего импульса. Если в данном полупериоде этого не произошло, данные 0частоте вращения якоря, записанные в запоминакяцем устройстве 5, считаются не действительными и стираются, В этом случае информация о длительности импульса, записанная ранее в запоминающем устройстве 4, сохраняется на входе блока 7 индикации и считается достоверной до появления новой информации. Если же следующий импульс в данном или следующем полупериоде питающего напряжения оказался полным и записан в запоминающем устройстве 5, старая информация из запоминакмцего устройства стирается и на вход блока 7 индикации, по команде из блока 2 синхронизации на разрешающий вход коммутатора 6, поступает новая информация. Такая и подобные ей ситуации являются обычными при работе электрических машин постоянного тока от вентильных преобразователей приработе их на противо-ЭДС и индуктивную нагрузку, В большинстве случаев электрические машины постоянного тока работают в режиме прерывистых токов, что облегчает выделение зубцовых пульсаций в те моменты времени, когда вентильный преобразователь закрыт и электрическая машина работает в генераторном режиме. Кроме того, кинетическая энергия маховых масс на валу якоря не позволяет за один-два полупериода питающего напряжения значительно уменьшиться угловой скоростиякоря. На фиг. 7 приведены зависимости, характеризующие принципы построения устройства, 1Зависимость m (фиг. 7) характеризует связь между длительностью зубцовых пульсаций и частотой вращения якоря электрической маШины. Она описывается выражением . где Т - текущее значение длительно сти импульсов зубцовых пульсаций на выходе коммутатора 6; К - коэффициент пропорциональноп - угловая скорость якоря„ Такая зависимость между частотой вращения якоря и сигналом на выходе устройства оказывается неудобной при исследовании в системах измерения, управления и стабилизации частоты вра щения. Поэтому блок 7 индикации, помимо информационных функций, зависимость вида (1) приводит к выражению --TO-I- O/V), где TQд - длительность импульсов, COOT ветствующая минимальной частоте вращения якоря п.-, К - коэффициент пропорциональности . Устройство, структурная схема которого приведена на фиг. 2, а диаграм ма работы отдельных узлов на фиг. 5, функционирует следующим образом (при описании остановимся лишь на отличии в работе рассматриваемой модификации устройства от основного варианта), Включение между формирователем 1 импульсов и ключевой схемой 3 дополнительно одновибратора 8 и схемы 9 логического умножения, позволяет упро стить устройство,т.е. исключить функ цию преобразователя в блоке 7 индикации (фиг. 2) зависимости (1) к виду (2) и возложить эти функции на одновибратор 8 и схему 9 логического умножения. Это происходит следующим об разом, С выхода формирователя 1 импульсы (фиго 5 е) поступают на входы блока 2 синхронизации, одновибратора 8 и схемы 9 логического умножения. Для определенности положим, что импульс зубцовой пульсации в данном полупериоде оказался полным. Передни фронтом этого и любого другого импул са допускается одновибратор 8 на вре мя, равное длительности импульсов зубцовых пульсаций TQ, , соответствующих минимальной частоте вращения яко ря п(фиг. 5 d). В этот же момент времени на один вход схемы 9 логичес кого умножения поступает импульс зуб цовой пульсации, а на другой вход сигнал с выхода одновибратора 8. В результате логического умножения эти двух сигналов зависимость вида (1 J приводится к выражению ( 2), Ход дальнейших рассуждений прежний и разница лишь в том, что дальнейшие операции в устройстве производятся со скорректированными дпительнос791ми зубцовых пульсац ий (фиг. 5 h). Такой подход к решению поставленной задачи позволяет за счет некоторого увеличения периода измерения частоты вращения реализовать устройство на логических элементах и исключить преобразования зависимости (1) к выражению (2) блоком 7 индикацииНа фиг, 3 приведена структурная схема следующей модификации устройства. Она дополнительно включает в себя одновибратор 8, счетчик 10 импульсов и схему 11 совпадения, которые включены между формирователем 1 импульсов, и ключевой схемой 3. Они предназначены для уменьшения погрешности измерения угловой скорости якоря, вносимой индуктивностью якорной цепи при перегрузках электрической машины. Для чего в качестве информационной единицы используется период изменения зубцовой пульсации (фиг, 6. ). Устройство работает следующим образом. Задним фронтом каждого импульса с формирователя 1 импульсов (фиг„б i) запускается одновибратор 8 на время, необходимое для переключения сметчика 10 импульсоВо При этом на один вход схемы 11 совпадения поступает сигнал с выхода одновибратора 8 (фиг. 6k), а на другой - информация с выхода счетчика 10, В результате суммирования сигналов, на выходе схемы 11 совпадения получаем импульсы (фиГо 6 Е), соответствующие периоду измерений зубцовых пульсаций. Механизм записи информации и ее обновления остался прежним, как в основном устройстве Отличие от преды дущих устройств измерения заключается в том, что для измерения частоты вращения якоря используется период изменения зубцовых пульсаций (фиг„ 6 Е), а началом отсчета информации являются задние фронты импульсов зубцовых пульсаций. Предлагаемые устройства могут быть использованы в системах автоматичес.кого регулирования и стабилизации
частоты вращения якоря электрических машин постоянного тока, а также для компенсации не аинейностей управляющей системы,
Формула изобретения
к якорной цепи электрической машины, первое запоминающее устройство, ий-, дикатор и блок синхронизации, подключенный к цепи питания электрической машины, о т л и ч а ю щ-ее с я тем, что, с целью повышения быстродействия и расширения области применения, в устройство введены клю чевая схема, второе запоминающее устройство и коммутатор, при этом вход ключевой схемы подключен к выходу фомирователя, выходы ключевой схемы к информационным входам первого и второго запоминающих устройств, их выходы через коммутатор - к индикатору, второй вход блока синхронизации - к выходу формирователя, выходы блокасинхронизации - к управляющим входам первого и второго запоминающих устройств и коммутатора
2,Устройство по По 1 ,. о т л и чающееся тем, что, с целью
повышения точности измерения, в устройство введены одновибратор и схема логического умножения, при этом вход одновйбратора и первый вход схемы логического умножения подключены к шяходу формирователя, второй вход схемы логического умножения - к выходу одновйбратора, а выход схемы логического умножения - к входу ключевой схемы,
Источники информации, во внимание при экспертизе
с ,
№ 1 46501, кл, G 01 Р 3/5, 97б (прототип).
w
I
e
m
Ш
0fff,
