Изобретение относится к транспорту, в частности к устройствам для автоматического контроля системы управления тиристорным преобразователем транспортных средств.
Цель изобретения - повышение точности контроля.
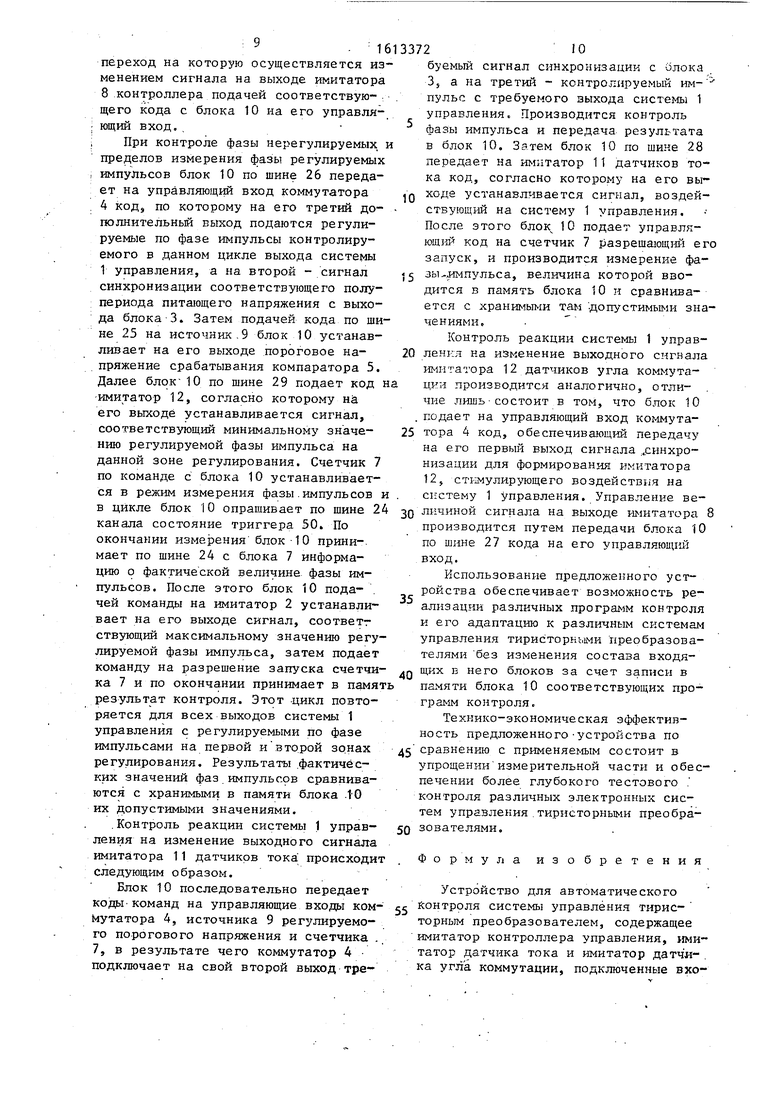
На фиг. 1.представлена функциональная схема предлагаемого устройства; на фиг. 2 - функциональная схема блока управления и регистрации; на фиг. 3 функциональная схема счетчика.
Устройство(фиг. 1) для контроля сийтемы 1 управления тиристорным преобразователем 2 содержит узел 3 синхронизации, подключенньш к синхронизирующим входам коммутатора 4, из- ;мерительные входы которого соедине- iны с выходами системы 1 управления.
Выходы коммутатора 4 подключены к одному из входов компаратора 5 и входу ограничителя 6 импульсов, выходы которых соединены с входами счетчика 7. Третий выход коммутатора 4 подключен к синхронизирующему входу имитатора 8 контроллера управления. Другой вход компаратора 5 под- ключен к источнику 9 порогового напряжения. Блок 10 управления и ре гистрации соединен выходом с допол- нительным входом коммутатора А, вхо- дом 9 источника, входами тмитатора 8 контроллера управления, имитатора 11 датчика тока и имитатора 12 датчика угла коммутации, а также каналом ввода-вьшода с счетчиком 7. Выходы имитаторов 8,- 11 и 12 пoдкJтачeны к входам системьь 1 управления.
Блок 10 управления и регистрации (фиг. 2) выполнен в виде управляющей электронно-вычислительной .машины, включающей микропроцессор 13, элемент 14 памяти и интерфейсные адаптеры 15-21, объединенные шинами адреса, данных и управления. Адаптер
21 соединен каналом ввода-вывода с дисплеем 22 с клавиатурой для ввода программ контроля и эталонных значений контролируемых сигналов. Адаптеры 15-20 осуществляют связь с зле-, ментами 4-12 устройства посредством шин 23-29.,
Счетчик (фиг. 3) содержит формирователи 30 и 31, входы которого являются измерительньии входами счетчика, триггер 32, элементы 33, 34 совпадения, одновибратор 35, эле
0
5
мент 36 совпадения, триггер 37, эл§ мент 38 ИЛИ, элементы 39, 40-совпадения, генератор 41 меток времени, селектор 42 импульсов, элементы 43- 46 совпадения, счетный блок 47, одновибратор 48, регистр 49 и триггер 50. Одни из входов элементов 33-46 являются управляющими входами счетчика, а выходы элементов 49,50 - его информационными выходами, соединенными шинами 23, 24 канала вьшода с блоком 10.
Режим работы .счетчика 7: измере- 5 ние длительности импульсов (ДИ), .из-
. мерение фазы импульсов (ФИ); счет числа импульсов за заданный интер. вал времени (ЧИ), задается четырехразрядным двоичным кодом, поступа- . ющим по информационно-управляющему каналу 23 от блока 10. При этом каждый из трех разрядов кода соответствует одному из перечисленных режимов работы универсального счетчика, а сигнал четвертого разряда
Сброс/пуск осуществляет обнуление счетного блока 47 и перебрасывает . триггер 50 окончания измерения в исходное состояние, тем самым подготав- ливае.т счетчик 7 к новому измерению. Управляющие сигналы ДИ, ФИ.ЧИ поступают на входы элементов совпадения и один из них, действительньш в рассматриваемом режиме работы, осуществляет коммутацию входных сигнальных цепей на выходы соответствующих элементов совпадения.
Генератор 41 меток времени формирует на своих трех выходах импульсы, частота которых соответствует определенному режиму измерения. Так, на выходе 51 формируются импульсы частотой 180 кГц, на выходе 52-18 кГц, а на выходе 53 - 0,5 Гц.
В режиме контроля длительности импульсов по каналу ввода-вывода от блока 10 поступает по шине 23 на счетчик сигнал ДИ лог. 1, открывающий элементы 33,39 и 44. Контролируемые импульсы поступают на вход формирователя 30, на выходе 54 которого формируются короткие импульсы по положительному фронту контролируемых импульсов, а на выходэ 55 - по отрицательному фронту. Эти импульсы переключают триггер 37 в сос- .тояние Начало цикла, выходной сигнал которого определяет время, в течение которого селектор 42 передает
0
5
0
45
0
55
51
на свой выход сигналы, поступающие с генератора 41 меток времени. Эти сигналы подсчитываются в счетном бло ке 47 и после переключения триггера 37 в исходное состояние импуль- сом на выходе 55 формирователя 30 на выходе одновибратора 48 появляется импульс, переписывающий информацию из счетного блока 47 в регистр 49 данных. Одновременно перебрасывается триггер 50, фиксирующий окончание контроля длительности импульсов. Выходной сигнал триггера 50 является, во-первых, информационным и, во- вторых, блокирует расзоту триггера 37 для исключения повторного измерения. Сигнал с выхода триггера 37 совместно с сигналами ДИ, ФИ, ЧИ является общим управляющим для элементов 43- 46 совпадения.
В режиме контроля фазы импульсов отличие работь счетчика 7 состоит в том, что интервал времени, в течение которого происходит прохождение сигналов с генератора 41 меток вре- мени через селектор 42 на счетный блок 47, определяется сдвигом во времени контролируемого сигнала, поступающего на вход формирователя 30,.и сигнала синхронизации, поступающего на вход формирователя 31. Режим контроля фазы импульсов задается путем пдачи на управляющий вход счетчика 7 сигнала ФИ - лог.1.
В режиме счета импульсов за определенный промежуток времени (при. частоте 0,5 Гц сигнала на выходе 53 генератора 41 - з.а 2С) управляющий сигнал ЧИ лог.1 поступает на управляющие входы элементов 36, 40, 43 46„ При этом контролирующий сигнал поступает на вход формирователя 30. Формируемьш на выходе 54 сигнал перебрасывает триггер 37 в состояние Начало цикла, что обеспечивает отпрание элементов 43, 46 совпадения. После этого первьй импульс на вьпсо- де 53 генератора 41 меток времени через элемент 46 совпадения воздействует на счетньш триггер 32, кото- рьй через элемент 40 совпадения отпирает селектор 42 и.контролируемые импульсы с выхода 55 формирователя 30 через элемент 43 совпаден:ня, селектор 42 поступают на счетный блок 47. По приходу второго импульса с выхода 53 генератора 41 счетный триг- гер 52 перебрасьшается в исходное
3726
состояние и запирает селектор в результате чего прекращается поступ--- ленив 1Фшульсов на Счетный блок 47, Одновременно срабатывает одновиОра- тор 35, который через элемент 36 совпадения воздействует на триггер 37 и- устанавливает его в состояние Окончание цикла. В свою очередь, срабаQ тьшает одновибратор 48, осуществляя запись результата в регистр 49 и устанавливая триггер 5G в состояние Конец измерения.
Устройство работает следующим об2 радрм.
Система 1 управления (фиг. 1) согласно алгоритму ее работы формирует импульсы управления, поступающие одновременно на управляющие входы
0 преобразователя 2 и измерительные входы коммутатора 4. Фаза импульсов управления и алгоритм распределения HMiiyjibcoB формируются под воздейст- BK3f-i управляющего сигнала с выхода
5 и ;итaтopa 12 контроллера, подаваемого на вход системы управления. Контроль реакции системы 1 управления на изменение тока и велич1шы ynva коммутации тиристоров преобразователя
0 2 производится путем подачи сигналов на входы системы 1 управления соответственно с имитаторов 11 датчиков тока и имитатора 8 угла коммутации, выходной сигнал последнего формируется по сигналу синхронизации, поступающему с первого выхода коммутатора 4.
Узел 3 синхронизации формирует импульсы, соответствующие разным -полу0 периодам и частоте пульсации выпрямленного напряжения питающей сети U , которые поступают на синхронизирующие входы коммутатора 4.
Алгоритм контроля системы управ5 ления записан в элементе 14 памяти блока 10 (фиг. 2), например, с помощью клавиатуры дисплея 22. Он состоит из следующих этапов: контроль параметров (амплитуды, длительности, про0 пуска) импульсов и их распределения по выходам системы 1 управления| контроль фазы нерегулируемых пределы изменения фазы регулируемых импульсов, контроль реакции системы управления
на изменение сигнала на выходах датчиков тока и угла коммутации. При этом в элементе 14 памяти блока 10 также хранятся последовательность .значений сигналов воздействий имитатоjiOB на систему управления;, логичес- в-ая модель распределения импульсов по Е ыходам системы управления на обоих ре гулирования, а также допустимые значения параметров и фаз ре- г улируемых и нерегулируемых ш шуль- . GOB. Результаты контроля перечисленных параметров импульсов записываются Микропропессором 13 в элемент 14 па- |Q йятИо Затем микропроцессор 13 извле- цает из элемента 14 памяти фактичес™ значения параметров и эталонные фшчения параметров, логически, обра- е|атывает и результаты контроля пе 15 редает через интерфейсный адаптер 21 На дисплей 22,
; Принцип работы предлагаемого 1 ойства на первом этапе контроля (контроль параметров импульсов уп- 20 Давления тиристорами и их распреде- Ления по выходам системы управления) Достоит в следующем.
Блок 10 передает по шине 29 на управляющий вход имитатора 12 конт- 25 1 |оллера двоичный код, согласно кото- Г Ому на его выходе устанавливается сигнал, задающий ренсим работы сис- 1 управления на первой зоне ре- 1 улирова ния, Далее блок 10 передает зо rjo шине 26 код на управляющий вход Коммутатора 4, согласно которому ддин из его измерительных входов Подключается к третьему дополнитель- йому выходу, т.е. контролируемьм сигнал поступает на вход, компаратора 5.
35
Контроль параметров импульсов (амплитуды, длительности, пропуска) производится с помощью счетчика 7, источника 9 регулируемого порогового напряжения, компаратора 5 и блока 10 Измерение амплитуд з импульсов произ- 13ОДИТСЯ методом последовательного приближения за п шагов,(п - разряд- socTb цифрового управляющего входа источника 9 регулируемого по- )огового напряжения). При этом счетчик 7 управляющш кодом., поступающш JT блока 10 по щине 23 канала ВЕдаода, переводится в режим измерения длительности импульса, а на выходе источника 9 управляющи коДом от бло- 1са 10, поступающим по шине 25, уста- навлршается требуемый на даннрм mare согласно алгоритму последователь- ио го приближения уровень опорного напряжения. Алгоритм поеледователь
. Q 5
0
5 о
5
5
.
0
5
ного приближения хранится в элементе 14 памяти блока 10.
На каждом очередном шаге реализации алгоритма компаратором 5 производится амплитудное сравнение контролируемого импульса с трртьего дополнительного выхода коммутатора 4 и опорного напряжения с выхода источника 9. При срабатывании компаратора 5 на его выходе формируется ий- пульс, идентичньй по длительности входному, и счетчик 7 описанным ранее способом (см. описание работы схемы фиг. 3) осуществляет измерение длительности импульса. Блок 10 при этом по шине 24 через канал ввода- вьшода в. цикле в течение заданного времени (или числа циклов) опрашивает состояние триггера 50 (фиг. 3) и как только он перебросится в состояние Окончание измерения, то ре- - зультаты измерения по той же шине 24 вводятся в элемент 14 памяти. Если же в течение заданного интервала времени (или числа циклов опроса) триггер 50 не перебросится, то в элементе 14 памяти фиксируется отсутствие срабатывания компаратора на данном шаге измерения амплитуды. В процессе измерения амплитуды импульсов производится одновременно и измерение длительности импульсов. Пропуск импульсов контролируется пу-. тем перевода счетчика 7 в режим счета числа импульсов за заданньй промежуток времени (фиг. 3) и результаты, счета принимаются в элемент 14 памяти блока 10.
Если производится контроль недействующих выходов системы 2 управления, то блок 10 передачей кода по шине 25 на источник 9 устанавливает мальш уровень порогового напряжения (например, выше уровня помехи) и производится лишь счет импульсов за заданньй промежуток времени для выявления действительного отсутствия импульсов.
Описанньй цикл повторяется для всех выходов системы 1 управления. В результате из принятой от счетчика 7 информации в памяти блока 10 микропроцессором 13 формируется,логическая модель фактического распределения импульсов по выходам системы 1 равления, которая сравнивается с эталонной. Далее алгоритм -контроля повторяется на второй зоне, регулирования.
переход на которую осуществляется изменением сигнала на выходе имитатора 8 контроллера подачей соответствую- щего кода с блока 10 на его управля- ; ющий вход,, i При контроле фазы нерегулируемых,
пределов измерения фазы регулируемых ; импульсов блок 10 по шине 26 передает на управляющий вход коммутатора , 4 код, по которому на его третий до- полнительньй выход подаются регулируемые по фазе импульсы контролируемого в данном цикле выхода системы 1 управления, а на второй - сигнал синхронизации соответствующего полупериода питающего напряжения с выхода блока-3. Затем подачей кода по шине 25 на источник.9 блок 10 устанавливает на его выходе пороговое напряжение срабатывания компаратора 5. Далее блок 10 по шине 29 подает код имитатор 12, согласно которому на его выходе устанавливается сигнал, соответствующий минимальному значению регулируемой фазы импульса на данной зоне регулирования. Счетчик 7 по команде с блока 10 устанавливается в режим измерения фазы.импульсов и в цикле блок 10 опрашивает по шине 2 канала состояние триггера 50. По окончании измерения блок -10 прини-. мает по шине 24 с блока 7 информацию о фактической величине фазы импульсов. После этого блок 10 пода- . чей команды на имитатор 2 устанавливает на его выходе сигнал, соответг ствующий максимальному значению регулируемой фазы импульса, затем подает команду на разрешение запуска счетчика 7 и по окончании принимает в памят результат контроля. Этот -цикл повторяется для всех выходов системы 1 управления с регулируемыми по фазе импульсами на первой и второй зрнах регулирования. Результаты .фактических значений фаз импульсрв сравниваются с хранимыми в памяти блока .10 их допустимыми значениями,
.Контроль реакции системы 1 управления на изменение выходного сигнала имитатора 11 датчиков тока; происходит следующим образом.
Блок 10 последовательно передает коды-команд на управляющие входы коммутатора 4, источника 9 регулируемого порогового напряжения и счетчика 7, в результате чего коммутатор 4 подключает на свой второй выход тре10
5
буемый сигнал синхронизации с блока 3, а на третий - контролируемый им- - пульс с требуемого выхода системы 1 управления. Производится контроль фазы импульса и передача результата в блок 10. Затем блок 10 по шике 28 передает на имитатор 11 датчиков тока код, согласно которому на его выходе устанавливается сигнал, воздействующий на систему 1 управления. После этого блок 10 подает управлк- ющ1а код на счетчик 7 1)азреша1ощий его запуск, и производится измерение фа5 зы,импульса, величина которой вводится в память блока 10 и сравнивается с хранимыми там .допустимыми значениями, .
Контроль реакции системы 1 управ0 ленил на изменение выходного сигнала имитатора 12 датчиков угла коммутации производится аналогично, отличие лишь-состоит в том, что блок 10 подает на управляющий вход коммутатора 4 код, обеспечивающий передачу на его первый выход сигнала ,,синхро- низации для формирования имитатора 12, стимулирующего воздействия на с1--стему 1 Управления. Управление величиной сигнала на выходе имитатора 8 производится путем передачи блока 10 по шине 27 кода на его управляющий вход.
Использование предложенного устройства обеспечивает возможность реализации различных программ контроля и его адаптацию к различным системам управления тиристорными преобразователями без изменения состава входящих в него блоков за счет записи в памяти блока 10 соответствующих программ контроля.
Технико-экономическая эффективность предложенного-устройства по сравнению с применяемым состоит в упрощении измерительной части и обеспечении более глубокого тестового . контроля различных электронных систем управления.тиристорнымн преобразователями.
0
5
0
5
0
Формула изобретения
Устройство для автоматического 25 Контроля системы управления тирис- торным преобразователем, содержащее имитатор контроллера управления, имитатор датчика тока и имитатор датч и- ка угла коммутации, подключенные вхо11
161
дггми к первому, второму и третьему выходам блока управления и регистра- :14ии, а выходами - к входам контролируемой системы сравнения, коммутатор, подключенный измерительными входами к контролируемой системе управления, Синхронизирующими входами - к узлу синхронизации, одним из выходов - к ограничителю импульсов, другим из выходов - к другому входу имитатора контроллера, управления, о т л и ч а- 1:0 щ е е с я тем, что, с целью повы- В1ения точности контроля, оно снабже- Йо источником регулируемого порого2 12
вого напряжения, компаратором, и счетчиком, одним входом подключенным к выходу ограничителя импульсов, другим входом - к выходу компаратора и
соединенным каналом ввода-вывода с блоком управления и регистрации, четвертый выход которого подключен к дополнительному входу коммутатора, а шестой - к входу источника, регулируемого порогового напряжения, соединенного выходом с одним из входов компаратора, другой вход которого подключен к третьему выходу коммутатора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля средств числового программного управления | 1988 |
|
SU1675852A1 |
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| Устройство для программного управления технологическим оборудованием | 1986 |
|
SU1372277A1 |
| Тренажер сварщика | 1984 |
|
SU1217151A1 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
| Устройство для контроля и диагностики логических блоков | 1984 |
|
SU1295401A1 |
| Многоканальный широтно-импульсный регулятор температуры (его варианты) | 1981 |
|
SU978111A1 |
| Устройство сбора дефектоскопической информации | 1985 |
|
SU1298719A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕЛЕВИЗИОННЫХ ОПТИЧЕСКИХ СИСТЕМ | 1991 |
|
RU2010448C1 |
| Измеритель параметров комплексных сопротивлений | 1989 |
|
SU1751690A1 |

Изобретение относится к транспорту, в частности к устройствам для автоматического контроля систем управления тиристорными преобразователями транспортных средств, и направлено на повышение точности контроля. Коммутатор 4 измерительными входами подключен к выходам системы 1 управления тиристорным преобразователем 2, синхронизирующими входами - к блоку 3 синхронизации, первым и вторым выходом - к ограничителю 6 импульсов и компаратору 5. Счетчик 7 измеряет длительность, фазу и амплитуду импульсов, которая сравнивается в компараторе 5 с напряжением регулируемого источника 9 порогового напряжения. Управление измерением и регистрация параметров, а также воздействие имитаторами 8, 11, 12 контроллера управления, датчика тока и датчика угла коммутации на систему 1 управления осуществляется блоком 10 управления и регистрации, выполненным на управляющей электронно-вычислительной машине. Измерение выше указанных параметров одним счетчиком 7 позволяет получить заданную точность измерения и хранить данные контроля всех систем 1 управления в блоке 10 управления и регистрации. 3 ил.
| Зайцев В.К., Алексеев А.Г | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| ДВЕРНОЕ СИГНАЛЬНОЕ ПРИСПОСОБЛЕНИЕ | 1923 |
|
SU650A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| - | |||
