;1 . .
Изобретение относится к автсматическаму регулированшо объектов с за- , паэдыванием и может быть использовано для автоматического регулирования уровней ВОДЬ с помощью электроуправляемых затворов пиротехнических сооружений на вододелвтельных узлах гвдромелиоративных систй.
Известен многоканальный автс латичаский регулятор, содержащий блок датчиков, блок обегающих устройств, задат- чвки, блок регулирования, корректиру.ющие устройства и исполнительные механизмы tl.
Данный регулятор не обеспечивает регулирование объектов с запаздыванием, что ограничивает область его применения.
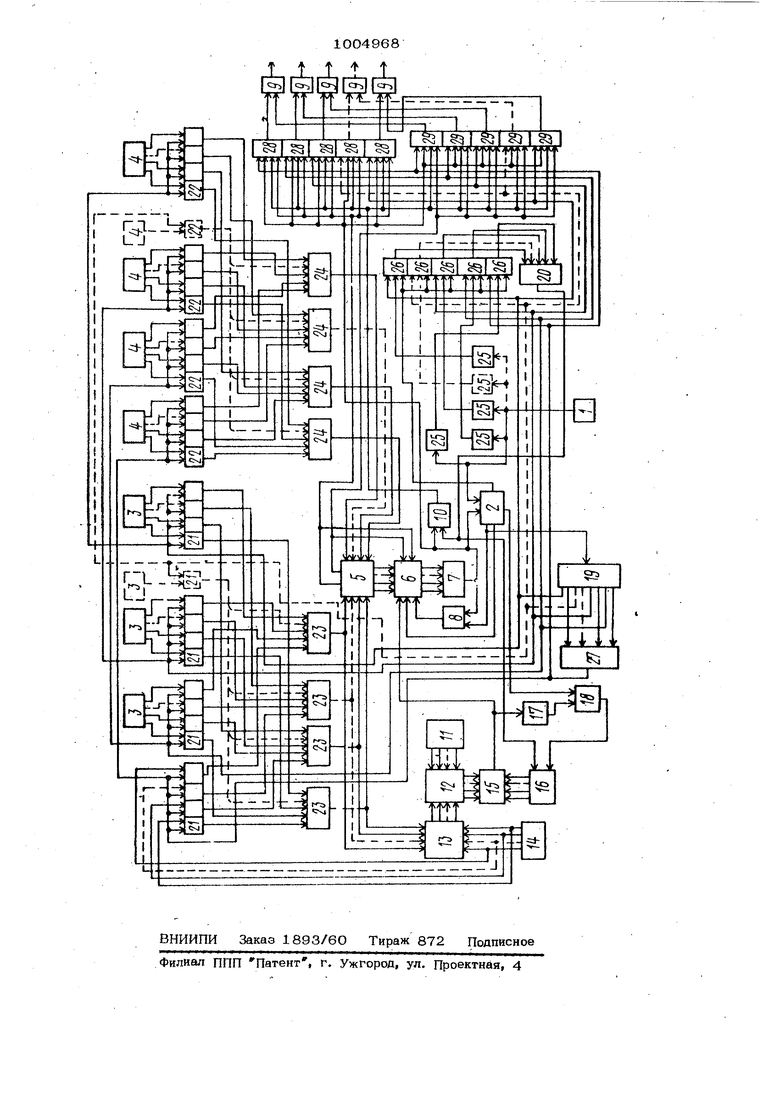
Наиболее близким к изобретеНшо техввческим решение. цифровой регулятор для гидромелиоративных сиотем, содержащий датчики уровня, задат- хйао уровня и последовательно соеди- венные блок рассогласования, реверсивный счетчик, элемент совпадения, выход, которого соединен с первыми входами триггера, первого элемента ИЛИ и блока управления, второй вход которого пощслю чен к выходу генератора импульсов, а первый и второй выходы - соответствен но ко второму входу первого элемента ИЛИ и к разрешающему входу реверся&ного рчетчика, обнуляющий вход которого соединен с выходе первого элемента ИЛИ, а также исполнительный механизм и блсж вычисления разности, первые вхо ды которого подключешл к датчику уров ня, а ш 1ходы - к вычитающим входам сумматора, суммирующие входы которого подключень к соответствующим разря р дам регистра памяти, а выходы - к пер вым входам блока сравнения, вторые выходы которого соединены с соответствующими разрядами счетчика импульсов, а выход - с информационным входом р версивного счетчтса и.через элемент задержки и второй элемент ИЛИ - с о&;нуляющим входом счетчика импульсов. счетный вход которого подключен к второму входу триггера, причем третий выход блока управления соединен с входом второго эпемента ИЛИ С23. Известный регулятор неприменим на многомерных объектах регулирования, представляющих собой .вододелитепьные узлы с общим вешним бьефом к несколь кими нижними бьефами, уровни воды в которых или расходы связаны -между общим верхним бьефом, что ограничивает область его применения. Цель изобретения - расширение области применения mi(}qpoBoro регулятора. Указанная цель достигается тем, что в цифровой регулятор для гидромелиоративных систем введены первая, вторая, третья, четвертая и пятая группы 8леме тов И, первая и вторая группы элементов ИЛИ, делители частоты, третий элемент ИЛИ и последовательно соединенны распределитель импульсов и четвертый элемент ИЛИ, выход которого и вторые выходы распределителя импульсов подключены к первым входам соответствукм щих элементов И во всех группах, разрядные выходы датчиков уровня через соответствующие элементы И первой группы и элементы ИЛИ первой группы соединены с вторыми входами блока вычисления разности и с первыми входами блока рассогласования, выходы задатчиКов уровня через соответствующие элементы И второй группы и элементы ИЛИ второй группы соединены с вторыми вхо« дами блока рассогласования, первый и второй знаковые выходы которого ПОДКЛК чены соответственно к вторым входам элементов И -четвертой группы и к вторым входам элементов И пятой группы, а также к знаковым входам реверсивного счетчика, причем входы делителей частоты соединены с выходом генератора импульсов, а выходы через элементы И третьей группы и третий элемент ИЛИ с вторым входом триггера, выход и nej вь1й вход Koiroporo подключены соответственно к третьим и четвертым входам элементов И четвертой и пятой групп, выходы которвх соединены соответствекн йо с первыми и вторыми входами соответствуюпшх (асполнительных механвз« мов, а четвертый и первый выходы блока управления соединены соответственно с третьими входами элементов И третьей группы и с входом распределителя вмпульсов. На чертеже изображена блок-схема предложенного цифрового регулятора .для гидрсмелиоративных систем. Цифровой регулятор для гидромелиоративных систем содержит генератор 1 импульсов, блок 2 управления, датчики 3 уровня нижнего бьефа, задатчики 4 уровня, блок 5 рассогласования, реве1 сивный счетчик 6, элемент 7 совпадения, переый элемент ИЛИ 8, исполнительные Механизмы 9, триггер 10, регистр 11 памяти, сумматор 12, блок 13 вычисления разности, датчик 14 уровня верхнего бьефа, блок 15 сравнения, счетчик 16 импульсов, элемент 17 задержки, второй элемент ИЛИ 18, распределитель 19 импульсов, (К-1)-входовый третий эле-. мент ИЛИ 20, первая rpymia элементов И 21, вторая группа элементов И 22, первая группа элементов ИЛИ 23, вторая группа элементов ИЛИ 24, делители 25 частоты, третья группа элементов И 26, четвертый элемент ИЛИ 27, четвертая группа элементов И 28, пятая группа элементов И 29. Растворим процесс вододеления, осуществляем1 1й вододелительным узлом. Из-за невозможности немедленно ис править погрешность в приходящей к вододелительному узлу величине расхода, определяемого вышележащим сооружением, один из водовыпусков вододелительного узла должен работать в режиме пропуска остатка, т.е. -Па,, Так как QnpMx %ciAtipHxt Q. то Q -Ql3dAifi. где QY - расход, определяемый остатком при отдаче заданных расходов; прих фактически приходящий расход к вододелительному узлу; Q - расход 1 -го водовыпуска вододелительного узла; So А при/ РасЮД. который должен приходить к вододелительнсхму узлу; АО. - погрешность величины приходящего расхода и расхода водовыпуска, работающего в режиме пропуска остатка; который должен отдавать водоылпуск, работающий в ...режиме пропуска остатка. Обеспечение устойчивости многомерной системы автоматического регулирования может быть достигнуто лишь при соблюденви указанных выше условий. Для этого водовыпуск, работающий в режиму пропуска остатка, регулируется по верхнему бьефу таким оёразом, чтобы ,, .c,. ,где Н - уровень верхнего бьефа; - заданная величина уровня верхнего бьефа вододелительного узла, Р .). При этом 8 « (i), где )ц - уровень воды в нижнем бьефе -го водовыпуска водоотделительного узла Остальные водовыпуск и регулируются по уровню нижнего бьефа ti-j tl а,,..- заданное значение уровня в нижнем №ефе i-го водовыпуска. Работа цифрового регулятора для гидромелиоративных систем происходит еледующим образом. После включения напряжения питания блок 2 управления осуществляет общий .сброс всех блоков авторегутютора, а распределитель 19 импульссж лишь сдви- гается на очередную позицию и устанавливается в произвольное положение. Допустим, что положение, в котором устаноышся цикличef ий распределитель 19 импульсов, соответствует такому, что на его втором (четном) выходе образовался сигнал выссжого потенциала. Этот сигнал поступает на входы соответствующих эле- меетов И 21 и на входы соответствующих элементов И 22. В результате чего к блоку 5 рассогласования через первую 23 и вторую 24 группы элементов ИЛИ окажутся подключенными соответственно датчик 3 управления нижнего бьефа 3 и соответствующий задатчик 4 уровня. Сигналом высокого потенциала с того же второго выхода циклического распределителя 19 импульсов, поступающим на nejvвые входы второго из третьей группы эл 4ентов И 26, подготавливается подача нмпульсов заданной частоты со второго делителя 25 частоты через элемент ИЛИ26 иа второй вход триггера 10 и на счетный вход счетчика 16 импульсов. Кроме того, тот же сигнал высокого потещиала поступает ,ш первые входы соответствуюпшх элементов И четвертой и пятой групп Выходы этих вторых элементов И соедивены с входами соответствующего исполнительного механизма 9. После отработки паузы, задаваемой блоксм 2 управлени с этого же блока подается импульс на разрещение записи модуля рассогласования, соответствующего паре подключенных датчика уровня и задатчшса уровня из блока 5 рассогласования в реверсивный счетчик 6, на входах направления счета которого присутствует сигнал рассогласования, соответствующий подключенной к блоку рассогласования паре: датчшЕ уровня - задатчик уровня. При наличии -рассогласования на выходе элемента 7 совпадения образуется сигнал высокого потенциала, который поступает на/вход «блока 2 управления и на вторые входы четвертой и пятой групп элементов И 28 и 29, Далее от блока 2 управления на грутшу элементов И 26 поступает сигнал разрешения отработки рассогласования, Однако только с выхода второго элемента И этой группы серия импутшсов соответ- ствующего делителя 25 частоты через элемент ИЛИ 2О прступит на вход счет- чика 16 импульсов и на второй вход трщ гера 1О. Первый же импульс этой опрокинет триггер 10 н на третьи входы четвертой и пятой ipynn элементов И 28 и 29 с выхода триггера 10 поступит CHTVнал на отработку рассогласования. В зависимости от знака рассогласования СЕПнал высокого потенциала, поступающий от блока рассогласования, будет присутствовать на четвертых входах либо четвертой, либо пятой групп элементов И 28 и 29. Если он будет присутствовать на входах четвертой руппы 28, то за счет разрешающего сигдалг от распределителя 19 импульсов на выходе второгч) элемента И этой группы воз никнет высокий потенпиал, который поступит на первый вход соответствующего исполнительного механизма 9 на подъем затворов сооружения, .соответствующего подключенной к блоку ,5 рассогласования паре: датчик уровня задатчик уровня распределителем 19 импульсов. Если сигнал высокого потенцв ала знака рассогласования будет присутствовать на четвертых входах пятой группы 29 элементов И, то вторым элеме нтом И этой группы тот же исполнительный механизм будет включен на опуокание затворов того же сооружения для устранения рассогласования, После устранения рассогласования прсх изойдет обнуление реверсивного счетчика 6, в результате чего на выходе эл& Мента 7 совпадения возникнет сигнал, который поступит на первый вход блока 2 управления и включит его на отработ. ку паузы, после чего обну;йющйм импульсом с первого выхода бло управления распределитель 19 импульсов установится в йопоженне, при котором импульс высокого напряжения образуется на его третьем (нечетшжл) выходе. Так как нечетные выходы распре делителя объединены элемекпом ИЛИ . 27, выход которого соединен с элементами И, соответствующими датчику 14 уровня верхнего бьефа и задатчику 4 Уровня этого бьефа 4, первому делителю 25 частоты и первому исполнительному механвзму 9, то регулирование уровня верхнего бьефа осуществляется при появлении высокого потенциала на каждом нечет ном выходе распределителя 19 импульсов Высокая точность поддержания уровня верхнего бьефа позволяет снизить частоту включения .механизмов перемещения за творов других водовыпусков, выведенных регулятором на заданный режим. В дальнейшем при переключении распределителя 19 импульсов на нечетные выходы, регулятор работает аналогично до описанного выше момента времени.. Счетчик 16 импульсов производит счет импульсов от нуля и в некоторый момент времени число в этом счётчике совпадает с «числом, находящимся в сумм(аторе 12 и равным разности между А, хра нящимся в регистре 11 памяти и числом Н 1i, содержащимся в блоке 13 шлчисления разности уровней верхнего и нижнего бьефов, к которому одновременно с подключением описанным выше образом датчиков 3 к 14 уровня к первым входам блока 5 рассогласования, те же датчики подключаются и к блоку 13 вычисления . разности. Таким образом, в зависимости от подключенной распределителем 19 импульсов: пары; датчик уровня - задатчик уровня, на выходе блока 13 образуются развюсгн Н-Н«0 , H-fi2,...,). где Н - уровень верхнего бьефа,общий для всех водовыпусков вододелительного узла; tl - уровни нижних бьефов водовыпусков вододелительного узла. Таким образом, на выходе сумматора 12 в зависимости от состояния распределителя 1.9 импульсов получаются числа, равные развости А-(Н-Н)А и А-() Число А устанавливается для конкретного вододелительного узла. 3Ha4emsevчастоты делнтелей 25 частоты учитывается коэффициентом L , являющимся периодом частоты V-ro делителя. Таким образом, коррекция длительности имйульса осущест вляется только для водовыделов вододелительного узла, регулируемых по уровням нижнего бьефа ftJ, в соответствии с законом A-(H-1i), а коэффициент i является масштабным множителем, уста- . . навливаемым в зависимости от скорости подъема затворов водовыпускных сооружений .вододелительного узла. Закон регулирования водовыпусков вододелительного узла, регулируемых по уровню нижнего бьефа имеет вид (-Ьз|)Л-(Н-ЧЛ где 11з - величина установки для i -го водовыдела, регулируемого по нижнему бьефу. Закон для регулирования для водовы-/ дела, регулируемого по верхнему бьефу имеет вид liH-H lA. где Т - период частоты первого из К делителей 25; Hj- величина уставки уровня верхнего бьефа вододелительного узла. Так как на состояние уровня верхнего бьефа вододелительного узла сложным образом влияют уровни нижнего бьефа всех водовыделов вододелитепьного узла, то коррекция для водовыдела, с помощью которого регулируется уровень верхнего бьефа, не предусмотрена, а повышена частота его опроса, осуществляемого после опроса каждого водовьшела, регулируемого по уровню воды в нижнем бьефе. После отработки рассогласования сигналом с выхода элемента 7 совпадения осуществляется установка триггера 10 в состояние О. Через элемент ИЛИ 8 сигнал с,элемента 7 совпадения подаётся на сбросовый вход реверсивного счетчика 6; защищая его от ложного срабатывания в интервале паузы, и на блок 2 управления для возвращения в исходное состояние всех цепей регуляторов. При отсутствий рассогласования регулятор отрабатывает паузу, после чего распределителем 19 импульсов подключается новая пара: датчик уровня - задатчик уровня, и описанный выше процесс повтс ряется. Таким образом, предложенный цифровой регулятор для гидромелиоративных систем пригоден для применения его на вододелительных узлах, представляющих схгбой многомерные объекты регулирования. Образующаяся в результате применения этого регулятора многомерная система автоматического регулирования является уо- 1ТОЙЧИВОЙ и обеспечивает минимум включений затворов водови шускных сооружений регулируемых по уровшо нижнего бьефа, НТО обусловлено поодержанием заданного уровня воды в верхнем бьефе вододелительного узла. Так как расход { -го водовыпуска определяется выражениемa,ro,.b /x--|f2(H-1ii), где d - величина открытия затворов; Ъ - ширина подпситового бтверстия; ft. коэффшшент расхода; - ускорение силы тяжести, в котором после установления 1 величины сохраняются не эр«А изменными, то необходимость в измецении положения затворов отсутствует. Кроме того, минимальное число включений оборудования увеличивает срок его службы за счет уменьшения износа. Применение предложенного регулятора позволяет получите, определенный техник экономический эффект. Формула изобретения .Цифровой регулятор для гидромелиора тивных систем, содержащий датчики, уро вня, задатчики уровня и последовательно соединенные блок рассогласования, реверсивный счетчик, элемент совпадения, выход которого соединен с первыми вхо.дами триггера, первого элемента ИЛИ и блока управления, второй вход которого подключен к выходу генератора импульсов, а первый и второй выходы - соответственно к второму входу первого эле мента ИЛИ и к разрешающему входу реверсивного счетчика, обнуляющий вход которого соединен с выходом первого элемента ИЛИ, а также исполнительные мехашомы и блок вычисления разности, первые входы которого подктоочены к да чику уровня, а выходы - к вычитающим входам сумматора, суммирующие входы которого подключены к соответствующим разрядам регистра памяти, а выходы к первым входам блока сравнения, вторые .входы которого соединены с соот. ветствующЕМи разрядами счетчика им пульсов, а выход - с информационным входом реверсивного счетчика и через элемент задержки и второй элемент ИЛИс обнуляющим входов счетчика импульсов, счетный вхс« которого подключен к входу триггера, причем третий выход блока управления соединен с входом второго элемента HJFIH, о т л и ч а- ю ш и и с я тем, что, с целью расширения области применения, в него введены первая, вторая, третья, четвертая и пят1ая группы элементов И, первая и вторая группы элементов ИЛИ,. делители частоты, третий элемент ИЛИ и поспедо вательно соединенные распределитель , импульсов и четвертый элемент ИЛИ выход которого и вторые выходы распределителя импульсов подключены к первым входам соответствующих элементов И во всех группах, разрядные выходы датчиков уровня через соответствующие элементы И первой группы и элементы ИЛИ первой грутшы соединены с вторыми входами блока вычисления разности и с первыми вхо дами блока рассогласования, выходы задатчиков уровня через соответствующие элементы И второй группы и элементы рЛИ второй группы соединены с вторыми входами блока рассогласования, пе{жый и второй знаковые выходы которого подключены соответственно к вторым входам элементе .И четвертой группы и к вторым входам элементов И пятой группы, , а также к знаковым входам реверсивного счетчика, причем входы делителей частоты соединеш 1 с выходом генератора импульсов, а выхс.ды через элементы И третьей группы и третий элемент ИЛИ « с вторым ъкоиом триггера, выход и пер.вый вход которого подключены соответственно к третьим и четвертым входам 9П&лек-ров И четвертой и пятой группы, выходы которых соединены соответствевно с первыми и вторыми входами соот ветствуюших исполнительных механтамов, а четвертый и первый выходы блока уп равления соединены соответственно с третьими входами элементов И третьей группы и с входом распределителя им- .ДуЛЕэСОВ. Источники информации, принятые во внимание при эксперт11зё 1.Авторское свидетельство CGCP №354761, кл. G,05 В 11/14, 1970. 2.Авторское свидетельство ССрР № 761973, кл. Q 05 В 11/26, 1978 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой регулятор для гидромелиоративных систем | 1980 |
|
SU868701A2 |
| Цифровой регулятор для гидромелиоративных систем | 1979 |
|
SU900259A2 |
| Система автоматического регулирования расходов воды (его варианты) | 1981 |
|
SU1043605A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Регулятор для полива | 1980 |
|
SU960750A1 |
| Система регулирования уровня воды в вододелительном узле ирригационного канала | 1987 |
|
SU1462261A1 |
| Автоматический регулятор фазового угла индукционной печи | 1990 |
|
SU1736012A1 |
| Цифровой регулятор | 1982 |
|
SU1019397A1 |
| Цифровой регулятор | 1988 |
|
SU1564585A1 |
| Электропривод стенда для испытания механических передач | 1985 |
|
SU1429267A1 |