входы соединены соответственно с выходами регистра управлетшя, регистра кода упреждения и первым выходом схемы управления режимом работы, вход которой соединен с третьим выходом таймера, а второй выход соединен с первым входом микрО|-ЗВМ, второй вход последней соединен с выходом KOMiviytaTOpa модутш памяти канала, а третий, четвертый, . пятый, шестой седьмой и восьмой выходы соединены соответственно с информационным входом третьего оперативного за-поминающего устройства, с входами р&гистра кода узгреждения, регистра управления, регистра кодов признака, схемы регистров кодов усиления канала, схемы регистров кодов частотного диапазона регистрации каналов, выход которой соединен с первым управляющим входом многокайального усилителя, второй управляющий вход послецнего соеаинен с выхоаом схемы регистров кодов усиления канала.



| название | год | авторы | номер документа |
|---|---|---|---|
| Аппаратура для геологического картирования на акваториях | 1981 |
|
SU938232A1 |
| Устройство регистрации сейсмоакустической системы | 1981 |
|
SU949588A1 |
| Способ регистрации эхо-сигналов в многоканальных сейсмоакустических системах | 1981 |
|
SU981912A1 |
| Аппаратура для структурно-литологического картирования донных отложений | 1980 |
|
SU900236A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1996 |
|
RU2097703C1 |
| Сейсмоакустическое устройство для изучения строения грунтов на акваториях | 1989 |
|
SU1712924A1 |
| Способ регистрации сигналов в эхолотных системах | 1980 |
|
SU894643A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2004 |
|
RU2260192C1 |
| Устройство для оценки напряженного состояния массива горных пород | 1989 |
|
SU1645512A1 |
| Устройство для сейсмоакустических зондирований на акваториях | 1987 |
|
SU1427316A1 |

АППАРАТУРА ДЛЯ .ГЕОЛОГИЧЕСКСГО КАРтаРОВАНИЯ НА АКВАТОРИЯХ, содержащая последовательно соединенные многоканальную приемную пьезокосу, многоканальный усилвтель и многоканальный аналого-пифроеой преобразователь с независимыми каналами, первое оперативное запоминающее устройство, управл5поцшй вход которого соединен с первым выходом схемы управления, второй выход которой соединен с управлйюнгам входом многхжанального аналогопифрового преобразователя, а первый второй входы схемы управления соединены соответственно с первым выходом таймера и выходом схемы регистров задержки регистрации канала, вход которой сое динен с первым выходом микро-ЭВМ, второй выход последней соединен с и формашюнным входом второго оперативного запоминающего устройства, выход которого соединен с входом цифрового магнитного регистратора, излучающую акустическую систему, вход которой соединен с вторым выходом таймера, вход последнего соединен с выходе блока визуального отображения регистрируемой информапии, отличающаяся тем, что, с пелью расширения функциональных возмсякностей нутем обеспечения возможности управления динамическим и частотным диапазонами регистрации каждого канала, она дополнительно соде{ жит схему регистров кодов частотного диапазона регистрации кашла, схему регистров кодов усиления канала, коммутатор модупя памяти канала, регистр .равления, регистр кода упреждения и схему управления режимом работы, при этом первое оперативное запс(инающее устройство выполнено в виде отдельных модулей памяти для каждого канала с независимым циклом обращения, а блок визуатоь. ного отображения регистрируемой информации выполнен в виде последователь соединенных регистра кода признака, перового преобразователя код-напряжение и устройства графического отображения сл и последовательно соединенных третьего 00 оперативного запоминающего устройства, NC BTopoix) преобразователя код-напряжение, усилителя -смесителя и самописца, причем информационный выход первого оперативного запоминающего устройства соединен с информационным входом коммутатора модуля памяти канала, управляющий вход которого соединен с третьим выходом схемы управления, четвертый и пятый выходы последней соединены сххэтветственно с управл5пощими входами второго и .третьего оперативных запомииаютцих устройств, а третий, четвепть1й и пятый
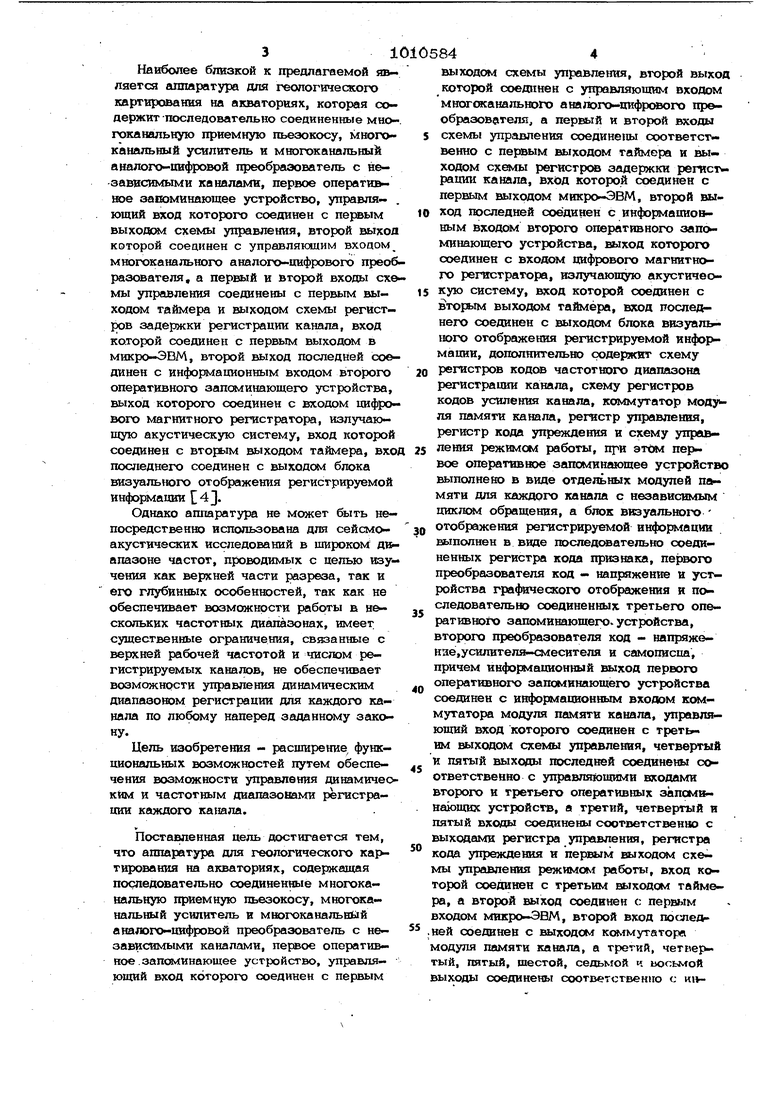
Изобретение относится к геофизической аппаратуре, предназначениой для сей- смоакустических исследований на акваториях в широком диапазоне исследуемых . частот как с целью изучения верхней части разреза при выполнении работ по геологическому картированию донных, осадков, проводимых при поисках и разведке месторождений твердых полезных ископаемых, так и с целью изучения глу- бинных структур при поисках нефтяных и газовых месторождений. Иавест-но устройство Аквамарин, которое содержит накопитель электрической энергии, трехэлектродный электропэдравлический излучатель, приемное устройство, усилитель, блок фильтров, регист ратор дискретного действия, два анало-гоных магнитофона и блок управления |i Устройство предназначено для решения структурнь1х задач на акватории по методике центрального луча и не может быть использоваш для изучения структурных и литологических особенностей разреза с 51спользованием методик многоканального приема и обработки, не позволяет осуществлять автоматизированную обработку получаемой информации с псялощью ЦВМ. Известна также цифровая геоакуст ческая станция, содержащая источник упругих колебаний, косу с приемниками упругих колебаний, аналого-цифровой преобразователь, устройство обработки, устройство регистрадаи и устройство управления . Указанная станция не может быть исхюльзована для выполнения сейс;моакустт ческих работ на акватории, проводимых с целью изучения структурных и литологических особенностей разреза с использованием методики многоканального приема и обработки, так как не позволяет осу- 1цествлять многоканальную цифровую регистрацию сейсмоакустической информации и не обеспечивает возможности получения и регистрации акустической . маЦии в признаковой форме. Известно также устройство для обработки данных многоканального сейсмопрофилирования в океане, содержащее последовательно соединенные сейсмоприемники, усилители, мн6гоканальнь1й пре- . образователь аналог - коД, многхжаналь- ный управляемый фильтр, многоканальный электронно-лучевой построитель, вычиолитель-анализа тор, блоки управления, синхронизации и контроля, буферное запоминающее устройство, цифровую развертку, регистр, дешифратор. Устройство предназначено для выполнения фильтрации и суммирования аналоговым путем и отобргнжения регистрируемой сейсмоакустической информации с псмощью многоканального электронно-лучевого хюстроителя f 3. Указанное устройство не может быть эффективно использовано для решения задач геологического картирования в щироком диапазоне частот, так как не обеспечивает возможности цифровой регистрации многоканальной сейсмоакустической информации на магнитной ленте в признаковой форме, не позволяет регистрировать сейсмоакустическую информацию в нескольких частотных диапазонах, не обеопечивает возможности обработки сейсмоакустической информации с применением Наиболее близкой к предлагаемой является аппаратура для геологического картирования на акваториях, которая содержит -последовательно соединенные мно гоканальную приемную пьезокосу, многоканальный усилитель и многоканальный аналого-цифровой преобразователь с независимыми каналами, первое оперативное запоминающее устройство, управля- ющий вход которого соединен с первым выходом схемы управления, второй выход которой соединен с управляющим входом многоканального аналого-цифрового прео разователя, а первый и второй входы схе мы управления соединены с первым выходом таймера и выходом схемы регистров задержки регистрации канала, вход которой соединен с первым выходом в микро-ЭВМ, второй выход последней сое динен с информационным входом второго оперативного запс линающего устройства, выход которого соединен с входом цифро вого магнитного регистратора, излучающую акустическую систему, вход которой соединен с вторым выходом таймера, вхо последнего соединен с выходом блока визуаль юго отображения регистрируемой информации 43. Однако аппаратура не может быть непосредственно использована для сейсмоакустических исследований в широком ди апазоне частот, проводимых с целью изу чения как верхней части разреза, так и его глубинных особе нюстей, так как не обеспечивает возможности работы в нескольких частотных диапазонах, имеет существенные ограничения, связанные с верхней рабочей частотой и числом регистрируемых каналов, не обеспечивает возможности управления динамическим диапазоном регистрации для каждого канала по любому наперед заданному закону. Цель изобретения - расширение, функциональных возможностей путем обеспечения возможности управления динамичео кИм и частотным диапазонами регистрации каждого канала. Поставленная цель достигается тем, что аппаратура для геологического картирования на акваториях, содержащая последовательно соединенные многоканальную приемную пьезокосу, многоканальный усилитель и многоканальный аналого-цифровой преобразователь с независимыми каналами, первое оперативное, запоминающее устройство, управляющий вход которого соединен с первым выходом схемы управления, второй выход которой соединен с управляющим входом многсжанального анапого-Ш1фр(жого пр&образователя, а первый и второй входы схемы управления соединены соответственно с первым выходом таймера и выходом ск&лы регистре задержки регистрации канала, вход которой соединен с первык выходом микро-ЭВМ, второй выход последней соединен с информапиовным входом BTopoix оперативного запоминающего устройства, выход которого соединен с входом цифрового магнитного регистратора, излучающую акустичеокую систему, вход которой соединен с вторым выходом таймера, вход последнего соединен с выходом блока визуаль{юго отображения регистрируемой информации, дополнительно сзодержит схему регистров кодов частотного диапазона регистрации канала, схему регистров кодов усиления канала, коммутатор модуля памяти канала, регистр управления, регистр кода упреждения и схему улрав«ения режимом работы, при этим первое оперативное запоминающее устройство выполнено в виде отдельных модулей памяти для каждого канала с независимым циклюю обращения, а блок визуально1х отображения регистрируемой информации выполнен в виде та следовательно соединенных регистра кода признака, первого преобразователя код - напряжение и устройства графического отображения и последовательЕю соединенных третьего оперативного запомишющего. устройства, второго преобразователя код - напряженяё,усилителя-смесителя и самописца, причем информационный выход первого оперативного запоминающего устройства соединен с информационным входом коммутатора модуля памяти канала, управляющий вход KOTopoix соединен с третьим выходом схемы управления, четвертый и пятый выходы последней соединены соответственно с управл51ющими входами второго и третьего оперативных запоминающих устройств, а третий, четвертый и пятый входы соединены соответственно с выходами регистра управления, регистра кода упреждения и первым выходом схемы управления режимом работы, вход которой соединен с третьим выходом таймера, а второй выход соединен с перв(1м входом микро-ЭВМ, второй вход nocvie ней соединен с выходом KoNfMyraropa модуля памяти канала, а третий, четвертый, пятый, шестой, седьмой ч ьосьлтой выходы соединены соответственно с информадаонным входом третьего оперативного запсминнющего устройства, с вхо дами регистра кода упреждения, регистра управления, регистра кодов признака, схе мы регистров кодов усиления канала, схемы регистров кодов частот юго диапазона регистрации каналов, выход которой соединен с первым управляющим входом многоканального усилителя, второй управляющий вход последнего соединен с выходом схемы регистров кодов усиления канала. Такая аппаратура позволяет осуществлять многоканальный прием и регистрацию результатов сейсмоакустических ис- следований в цифровой форме на магнитной ленте в формате ЕС ЭВМ в любом выбранном частотном диапазоне либо одновременно в нескольких частотных диапазонах решстрации. При этом на магнитной ленте формируется информация которая представляет собой последовательные поканальные наборы признаковых характеристик эхо-сигналов для каждого регистрируемого отражения в разрезе по текущему циклу зондирования или по серии зондирований, либо последователе ные поканальные наборы акустических характеристик для выделенных отражающих акустических границ. Аппаратура ,обе спечивает возможность визуализации регистрируемых признаковых характеристи эхо-сигнала и акустических характеристик исследуемого разреза, позволяет управлять динамическим и частотным диапазоном регистрации по любому наперед заданному закону в каждом цикле зондирования, дает возможность обработки регистрируемой информации с использовани ем ЭВМ единой серии по методике мног канального приема и обработки сейсмоакустической информации и алгоритмам структурно-литолргического разделения изучаемого разреза. В предлагаемой аппаратуре число регистрируемых канало не зависит от рабочей частоты излучателя. На фиг. 1 приведена функциональная схема ахптаратуры для геологического картирования на акваториях; на фиг. 2 временная, диаграмма работы аппаратуры Аппаратура состоит из многоканадьяного усилителя 1, информационный вход которого соединен, с выходом многоканальной приемной пьезокосы 2, первый и второй управляющие входы соединены соответственно с выходами схемы 3 регистров кодов частотного диапазона ре.гистрации канала и схемы 4 регистров КОДОВ усиления канала,, а информационньтй выход соединен с информационным входом многоканального аналого-цифрового преобразователя 5, информационный выход которого соединен с информационным входом первого оперативного запоминающего устройства б, а управляющий вход соединен с вторым выходом схемы 7 управления, коммутатора 8 модуля памяти канала, информационный выход которого соединен с вторым входом микро-ЭВМ 9, информационный вход соединен с информационным выходом первого оперативного) запоминающего устройства 6, а управляющий вход соединен с третьим выходом схемы 7 управления, первый, четвертый и пятый выходы которой соединены соответственно с управляющими входами первого оперативного запоминающего устройства 6, второго оперативного запоминающего устройства 10 и третьего оперативного запоминающего устройства 11, а первый, второй, третий, четвертый и пятый входы соединены соответственна с первым выходом таймера 12, с выходами схемы 13 регистров задержки регистрации канала, регистра 14 управления, регистра 15 кода упреждения и первым выходом схемы 16 управления режимом работы, вход которой соединен с третьим выходом таймера 12; регистра 17 кода признака, выход которого соединен с входом первого преобразователя 18 код - напряжение, а вход сое- .. .динен с шестым выходом микро-ЭВМ, первый, второй, третий, четвертый, пятый, седьмой, восьмой выходы которой соединены соответственно с входами схемы 13 регистров задержки регистрации канала, с информационными входами второго оперативного запоминающего устройства 1О и третьего оперативного запоминающего устройства 11, с входами регистра 15 кода упреждения, регистра 14 управления, схемы 4 регистров кода усиления канала, схемы 3 регистров кодов частотного диапазона регистрации канала, а первый вход соединен с вторым выходом схемы 16 управления режимом работы; устройства 19 графического отображения, которого соединен с выходом первогч) преобразователя 18 юод - напряжение; цифрового магНИТНО1Х) регистратора 20, вход которого соединен с информационным выходом второго оперативного запоминающего устройства 10; второго преобразователя 21 код - напряжение, вход которого соеди нен с выходом третьего оперативного запоминающего устройства 11, выход соединен с входом усипитепя-смесителя 22, выход которого соединен с входом самописца 23; вход таймера 12 соединен с выходом самописца 23, а второй выход Таймера соединен с входом излучающей акустической системы 24. На временной диаграмме работы аппа ратуры в шестиканапьном варианте (в ка честве примера расолотрена регистрация информации по первому, второму и шестому каналам) обозначены сигналы 25 , синхронизации, поступающие от самописц временная гюследовательность сигналов 26 таймера, сигнал 27 запуска излучающей системы, сигнал 28 передачи байт режима в микро-ЭВМ; сигналы 29 - 31, определяющие пределы регистрации соответственно для первого, второго и шестого каналов;сигналы 32 - 34, определяющие время сопровождения микроЭВМ кодов усиления и кодов частотного диапазона регистрации соответственно для цервого, второго и шестотх каналов; сигнал 35, определяющий время вывода информации из третьего оперативного запоминающего устройства; сигналы 36 38, сщределяющие время обработки cefcсмоакустической информации, зарегистрированной соответственно первым, вторы |и шестым каналами; сигналы 39 и 4О, Ьпределяющие времй передачи информации .соответственно во второе и третье оперативные запоминающие устройства; сигнал 41 определяющий время вычисления и передачи кода задержки регистрации канала в регистры задержки каждого канала; сигнал 42, определяющий передачу кода признака на устройство графического отображения; сигнал 43, опреде- ляющий вычисление и Передачу кода yrtреждения в регистр кода упреждения. Аппаратура работает следующим образом. По сигналам 25 синхронизации, поступающим с выхода самописца 23 на вход таймера 12, запускается таймер 12 и вырабатывает временную поспецр вательность сигналов 26, которая поступает с первого выхода таймера 12 на первый вход схемы 7 управления. Из вре:йенной последовательности сигналов 26таймером ±2, формируется сигнал 27запуска излучающей акустической . системы 24 на о черед(юй цикл зондирова кия, который поступает с второго выхода таймера 12 на вход излучающей акустической .системы 24, и сигнал 28 передачи управляющего байта, постушисгащй с третьего выхода 12 ня вход 16 управления работы, По сигналу 28 передачи схема 16 управления режимом работы с второго выхода передает на первый вход микро-ЭВМ 9 управляюишй байт, который ориентирует программу функционирования микро-ЭВМ 9 на выполнение заданного режима работы в соответстит с поступивигем кояам.. Использование для передачи кода режима одного байта информации обеопечивает возм(кность реализации 256 режимов работы аппаратуры. Одвовреме но с передачей управляющего байта в микро-ЭВМ 9 код режима поступает с первого выхода схемы 16 управления ре жимсм работы на пятый вход схемы 7 управления, которая подготавливает управляющие серии сигналов для обеспечения функционирования блоков аппаратуры в выбранном режиме. К числу основных управляющих сигналов относятся уп равляющие серии шгналов, определяющие выбраннь1й шаг квантования для каждого канала, серии сигналов в соответствии с выбранным шагом квантования, определяющие режим записи информации в соответствующие модули памяти канала; а также серии управляющих сигналов, определяющие темп вывода информации из третьего, оперативного запоминающего устройства 11., Микро-ЭВМ 9, приняв код режима, выходит из режима ожидания, подготавливает программу функшюнирсва- шш заданного режима и переходит к; ее выполнению. При этом управление работой аппаратуры осуществляется микро-ЭВМ 9 с псжющью регистра 14 управления, на вход icoToporb в соответствии с программой функционирования с пятого выхода микро-ЭВМ.9 поступает байт управления, определяющий основные м(шрорежимы работы аппаратуры. Дешифрация состояния регистра 14 управления осуществляется схемой 7 управления, причем байт управления поступает с выхода регистра 14 управления на третий вход схемы 7 управления. С пш,{ощью микрорежимов осуществляется выполнение принятой последовательности приема, обработки и передачи инфор 4ации. После приема управляющего байта микро-ЭВМ 9 переходит в режим управления приемсэм сейсмоа огстичесвх)й И№формации, при этом в соответствии с выбранным режимам работы и принятой методикой в течение времеш сн треде|ленвого длителыюстью сигналов 32 - 34, , микро-ЭВМ 9 с седьмого выхода на вход нала передав г коды усиления для каясдого канала, которые поступают с выхода схе мы 4 регистров кодов усиления канала на на второй управляющий вход многоканального усилителя 1, где осуществляют управление коэффициентом передачи усилителя каждого канала в соответствии с заданным зако1юм изменения. В качестве закона изменения коэффициента усиления усилителя каждого канала может быть выбран любой закон изменения. Нйпример, в соответствии с принятой последовательностью эхо-сигналов по каждому каналу в предыдущем цикле зондирования для последующего цикла зондирования могут быть выделены ожидаемые интервалы времени прихода эхо-сигналов и для них вычислены оптимальные значения коэффициентов усиления с учетом динамической характеристики аналого-цифрового канала Одновременно с отслеживанием коэффициентов усиления для каждого канала микро-ЭВМ 9 в течение действия сигналов 32 - 34 выполняет передачу значений кода частотного диапазона для каждо .го регистрируемого канала, причем коды частотного диапазона поступают с восьмого выхода микро-ЗВМ 9 на вход схемы 3 регистров кодов частотного диапазона регистрации канала, с выхода которой в соответствии с принятым кодом осуществляется управление частотным диапазоном регистрации усилителя каждого канала по первому управляющему входу многоканального усилителя 1, Принятая схема управления частотным диапазоном регистрации для каждого канала обеспечивает возможность изменения частотного диапазона регистрации как в каждом цикле зондирования, так и в течение текущего цикла зондирования по любому наперед заданному закону. Это обеспечивает возможность одновременного прием: и регистрации сейсмоакустичес кой информации как от верхней части геологического разреза, так и от его более глубоких горизонтов при соответствующем выборе режима работы излучающей акуотической системы 24. Схема 7 управления на основании вре менной последовательности сигналов 26 таймера и значений кодов задержки регистрации канала, поступающих с выхода схемы 13 регистров задержки регистрации канала на второй вход схемы 7 упра
вления, формирует сигналы 29 - 31, определяющие пределы регистрации для каждого канала. На основании этих сигсигнала. При этом амплитудное значение радиоимпульса соответствует, например, одной характеристике эхо-сигнала, а его работы формируются управляющие серив, которые в заданных пределах регистрации поступают с второго и первого выходов схемы 7 управления соответственно на управляющие входы многоканального аналого-цифрового преобразователя 5 и первого оперативнозро запоминающего устройства 6. В результате этого сейсмоакустическая информация, принятая мшгоканальной пьезокосой в заданных пределах регистрации, после усиления, частотного ограничения и аналого-цифрового преобразования размещаешься в перг всм оперативном запоминающем устройстве 6, причем информация отдельного канала размещается в соответствующем модуле канала, а цикл обращения к модулю канала при записи информации не зависит от цикла обращения к любому другому модулю памяти канала первого оперативного запсминающехх устройства 6. Длительность сигналов 29 - 31 Пределы регистрации определяется объеьюм модуля памяти канала. Исходя из линейногхэ закона затухания акустической энергии в осадках объем модуля памяти ка1гала практически может быть ограничен величиной 2к-4к 16-разряаных слов. На основании временной последователь. тасти сигналов 26 таймера 12 и значений кода упреждения, поступающих с выхода регистра 15 кода упреждения на четвертый вход схемы 7 управления, схема 7 управления формирует сигнал 35, который определяет ьремя вывода информации из третьего оперативного запоминающего устройства 11. При этом с учетом сигнала 35 и выбранного режима работы схема 7 управления формирует последовательность сигналов вывода, которые поступают с ее пятого выхода на управляющий вход третьего оперативного запоминающего устройства 11 и определяют режим, длительность и темп вывода информации. Информация, поступающая с третьего оперативного запоминающего . устройства 11, преобразуется в аналоговый сигнал с помощью второго прео&разователя код - напряжение 21, смешивается с синусоидальным напряжением частотой 10 - 2О кГц с помощью усипителя-смесителя 22 и далее в виде радиоимпульсов поступает на самописец для формирова1тя эхограммы, либо графи- ка отображаемой характеристики эхоширина - другой отображаемой характеристике выделенвогх) axo-cHFvana. Вывод икформакии из третьего оперативного запоминающего устройства 11 идет одновре менно с приемом сейсмоакустической ui&формйшга в первое операттшмое запоминающее устройство 6. После окончания регистрации и приема информашга в первое оперативное запоминающее устройство 6 микро-ЭВМ переходит к обработке зарегистрированной ин.формашга, .причем обработка информахши выполняется поканально. С этой целью микро-ЭВМ 9 с помощью регистра 14 уп равления и схемы 7 управления осуществпяет последовательное подключение к второму входу микро-ЭВМ 9 через коммутатор 8 модуля памяти канала необходимого модуля памяти канала первого оперативного запсыинаюше1Х устройства 6. Последовательное подключение необх димого модуля памяти осуществляется с помощью сигналов 36 - 38, поступающих с третьего выхода схемы 7 управления на управляющий вход коммутатора 8 модуля памяти канала. Длительность сигналов 36 - 38 определяется временем необходимым для обработки микро-ЭВМ информации одного канала. Алгоритмы об работки определяются выбранной методикой обработки и режимом, работы и преследуют своей оснйЬной целью сзкатие сейсмоакусгической информации с целью уменьшения ее общего объема и повышение инфо{%(ативности регистрируемой информации. Эта цроцедура обработки може состоять из операций страг-ификации, вычисления признаковых характеристик эхо-сигнала, вычисления акустических ха рактеристик разреза. В процессе выполнения операции стратификации осушеств- ляется выделение акус1ических границ в регистрируемой последовательности эхосигналов в каждом цикле зондирования и исключение кратных отражений и сигнаюннпомех. Да леедля выделенных акуогических границ формируются наборы признаковых характеристик эхо-сигналов, на основании KOTOIHJX в процессе обработ ки также могут быть вычислены акуотические характеристики выделенных акустических границ в разрезе. Зеисончив поканальную обработку, микро-ЭВМ 9 переходит к передаче поканаль ных наборов признаковых или акустических характеристик для вшделенных акустических границ во второе оперативное запоминающее устройство 1О, при этом. информация поступает в течение времени, .определенного длительностью сигнала 39, с второго выхода микро-ЭВМ 9 на информационный вход второго оперативного эапоминающегх) устройства 10. В течение серии зондирований во втором оперативном запоминающем устройстве Ю осуществляется формирование информационной зоны, которая поступает на запись на магнитную ленту цифрового магнитного регистратора 2О, После передачи информации во второе оперативное запоминающее устройство Ю микро- ВМ переходит к подпрограмме формирования массива вывода и передаче его в третье оперативное запоминающее устройство 11. В процессе работы этой подпрограммы в третьем оперй тивнсм запоминающем устройстве 11 формируется информация, которая участ вует в формировании либо прюнаковой эхограммы, либо графической информации го одной шш неЬЛольким признаковым характеристикам эхо-сигнала. В признаковой эхограмме ширина записи на бумажной ленте самописца может соответствовать одной признаковой характеристике, а интенсивность записи - другой. В каждом цикле зондирования на этапе поканальной (Обработки в течение времени, определяемого длительностью сигналов 36 - 38, .осуществляется анализ динамических характеристик принятой посл&дсйэательности эхо-сигналов, выполняется вычисление ожидаз ых интервалов регист. рашш эхо-сигналов для последующего цикла зондирования, вычисляются значения коэффициентов усиления для каждого выделенного интервала, которые в последующее цикле используются микро-ЭВМ 9 для управления коэффициентом усиления усилителя каналов. Если на этапе поканальной обработки вычисляются спектральные характеристики регистрируемых эхосигналов, то полученная информация мо- жет быть использована в последующем цикле зондирования для управления частотным диапазоном регистрации. На основании времени прихода эхосигналов от первых слоев для всех регрстрируемых каналов, с y4eTON геометрии приема и, характеристик ;фвижения судна, микро-ЭВМ 9 в течение времени действия сигнала 41 сжределяет время адержки регистрации каждого канала и передает коды времени задержки с первого выхода на вход схгалы 13 регистров адержки регистрации канала. После этого микро-ЭВМ 9 выполняет передачу выбранной характеристики эхо-сигнала
на устройство 19 графического отобре етш/При этом информация поступает в течение времени действия сигнала 42 с шестого выхода микро-ЭВМ 9 на вход регистра 17 кода признака, с которого s через первый преобразователь 18 код i напряжение передается на вход устрой-, ства 19 графического отображения. В течение времени действия сигнапа 43 мккро-ЭВМ 9 осуществляет вычисле- Ю ние времени задержки вывода информации в последующем цикле зондирования . из третьего оперативного запоминающего устройства 11 на самописец 23. В ре-, мя задержки йычисляется на основании , 15 масштаба формируемой эхограммы и минимального значения водного столба в изучаемом районе с целью обеспечения неискаженной передачи геометрических характеристик разреза при различных20
масштабах эхограммы и максимального использования поля записи самописца 23 для отображения сейсмоакустической информации. Вычисленное значение времени задержки в конце интервала времен 25 определяемое сигналом 43, поступает с % четвертого выхода мдасро-ЭВМ 9 на. вход регистра 15 кода упреждения, после чего микро- ЭВМ 9 переходит в режим ожидания очередного байта режима.30
Использование предлагаемой аппаратуры позволяет получать сведения об изуI чаемом разрезе с применением методики многоканального приема и обработки информации при сейсмоакустических исследованиях на акватории в широком диапазоне частот, обеспечивает возможность
регистрации акустической информации одновременно в нескольких частотных диапазонах, что дает возможность получить сведения как о верхней части разреза, так и о его глубинном строении, что значительно повышает геологическую эффективность выполняемых исследований за счет повышения информативности. Алпаратура обеспечивает оперативное ynpaBiление частотным и динамическим диапазонсы регистрации канала, позволяет для каждой выделяемой акустической границы выбирать оптимальные режимы усиления и фильтрации, что в значительной мере способствует повышению качества и достоверности регистрируемой информации. Использование аппаратуры обеспечивает повышение эффективности как этапа предварительной обработки сейсмоакустичеокой информации, так и окончательной обработки с использованием цифровых методик обработки.
Использование в предлагаемой аппаратуре независимых аналого-цифровых каналов с моД5гльной организацией памяти для каждого канала и независимым циклом обращения к модулю памяти канала существенно упрощает схему управления каналами, повышает надежность системы в целом и обеспечивает независимость верхней граничной частоты аппаратуры от числа регистрируемых каналов. Аппаратура позволяет получить максимально возможное уплотнение сейсмоакустической информации, поступающей от многоканальной приемной системы.
/
7
2
Г2
re
20
/
ff
- /7
r //
2f
. f4
22
2J
(риг f
UlllltlllllHIIIIIIIIIIIJIIIHIIII
фиг. 2
t
-a.
IZL
Г1
П
n-i
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Техническое описание аппарвту- ры | |||
| Аквамарин Завода Теоприбор НПО Союзгеотехника, М., 1978 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
