1
Изобретение относится к геофизическим методам разведки и может быть использовано при геофизичес- , ких исследованиях на участках,покрытых водой, для регистрации результатов акустических измерений, проводимых с целью геологического картирования донных отложений,поисков морских россыпных месторождений полезных ископаемых и месторождений строительных материалов.
Известен способ эквидистантного кодирования и регистрации сейсмической информации, который предусматривает преобразование сейсмической трассы в последовательность цифровых отсчетов с постоянным шагом дискретизации
Этот способ не может быть эффективно использован для регистрации акустической информации из-за высокой скорости поступления информации от ЭХОЛОТНЫХ систем и необходимости регистрации больших объемов акустической информации. Кроме того, он не обеспечивает исключения из процесса регистрации мешающих сигналов, которые поступают в приемные устройства эхолотных систем.
Известен также способ регистрации сигналов, в котором осуществляют исключение мешающих сигналов в ЭХОЛОТНЫХ системах. Способ включает в себя определение времени прихода последовательности эхо-сигналов по предыдущей посылке, опре10деление ожидаемых временных интервалов прихода последовательности эхо-сигналов по последуюией посылке и регистрации в выбранных временных интервалах последователь15 ности эхо-сигналов по последуквдей посылке 2j.
Однако этот способ не обеспечивает уплотнение акустической информации, регистрируемой в выбранных временных интервалах , и не поз20воляет повысить информативность регистрируемой информации.
Цель изобретения - уменьшение объема регистрируемой информации и
25 повышение ее информативности.
Поставленная цель достигается тем, что в способе регистрации сигналов в эхолотных системах, включающем определение времени прихода
30 последовательности эхо-сигналов по
предьщущей посылке, определение ожидаемых временных интервалов прихода последовательности эхо-сигналов по последующей посылке и регистрацию в выбранных временных интервалах последовательности эхо-сигналов по последующей посылке, определяют в последовательности эхо-сигналов по последующей посылке максимальные значения огибающих эхоригналов, и их положение на временной оси, вычисляют признаковые характеристики выбранных эхо-сигналов и регистрируют полученные характерис,тики эхо-сигналов на магнитной ленте, дополнительно осуществляют регистрацию этих параметров на бумажной ленте, причем ширина записи на бумажной ленте пропорциональна величинам максимальных значений огибающих регистрируемых
эхо-сигналов. I
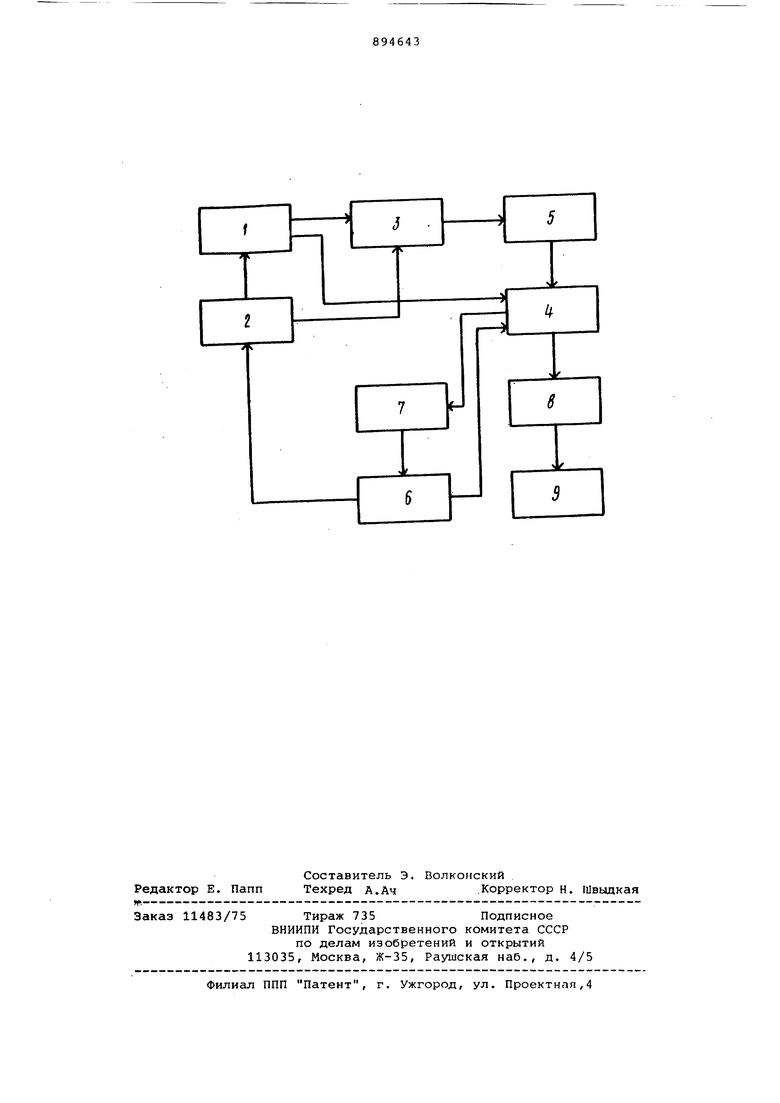
На чертеже представлена структурная схема одного из возможных устройств , реализующих предлагаемый способ.
Устройство состоит из схемы 1 управления пределами регистрации эхо-сигналов, соединенной с эхолотной системой 2, со схемой управления приемом и размещением информации в первом оперативном запоминающем устройстве 3 и с микро-ЭВМ 4, второго оперативного запоминающего устройства 5, соединенного со схемой управления приемом и размещением информации и с микро-ЭВМ,самописца 6 экспресс-информации, соединенного с эхолотной системой,со схемой управления самописцем 7 и с микро-ЭВМ, схемы 8 управления записью информации на магнитную ленту, соединенной с цифровым магнитным регистратором 9 и с микро-ЭВ Выход эхолотной системы соединен со входом схемы управления приемом и размещением информации в первом оперативном запоминающем устройстве информационный выход микро-ЭВМ соединен со входом схемы управления самописцем.
Способ осуществляют следующим образом.
По сигналам синхронизации,поступающим от самописца 6 экспрессинформации эхолотная система 2 запускается на очередной период зондцрования и подает сигналы на схему1 1 управления пределами регистраurfti эхо-сигналов на определение текущего значения глубины. Схема управления пределами регистрации эхосигналов на основании результатов определения значения глубины по предыдущему зондированию вырабатывает уровень, определяющий разрешенные пределы регистрации эхосигналов , поступающих от эхолотной системы 2 в последуквцем цикле зондирования. Эхо-сигналы от эхолотной системы 2 и уровень разрешенных пределов регистрации поступают на схему управления приемом и размещением информации в оперативном запоминающем устройстве. 3, которая производит регистрацию цифровых выборок эхо-сигналов в оперативном запоминающем устройстве 5. После окончания регистрации эхо-сигналов в оперативном запоминающем устройстве 5 запускается микро-ЭВМ 4 на выполнение операции поиска в опера„тивном запоминающем устройстве 5 максимальных .значений огибающих эхосигналов и определения положения эти максимальных значений на временной оси. После их определения и регистрации в оперативной памяти микро-ЭВМ 4, микро-ЭВМ 4 переходит к вычислению признаковых характеристик выделенных эхо-сигналов и регистрации их в оперативной памяти микро-ЭВМ 4. В качестве регистрируемого набора признаковых характеристик эхо-сигнала может быть использован,например, набор из следующих характеристик эхо-сигнала: ширины эхо-сигнала, коэффициентов формы эхо-сигнала и интегральных характеристик эхо-сигнала. Интегральные характеристики эхосигнала могут представлять собой либо интеграл от положительных значений эхо-сигнала, либо интеграл от отрицательных значений эхо-сигнала, либо интеграл от знакопеременного эхо-сигнала, причем интегральная характеристика нормируется по интегральной характеристике излученного сигнала с учетом геометрического расхождения луча, либо по максимальному значению огибающей эхо-сигнала.В качестве набора признаковых характеристик эхо-сигнала могут быть использованы фазовые характеристики и ха- . рактеристики спектра эхо-сигнала. Кроме того, в качестве признаковых характеристик эхо-сигнала могут быть, например, использованы следующие: величины амплитуд отрицательног и положительного полупериодов эхосигнала, оредшествующих полупериоду с абсолютным максимальным значением амплитуды эхо-сигнала и их положение на временной оси, величины амплитуд отрицательного и положительного полупериодов эхо-сигнала, следующие за полупериодом .с абсолютным максимальным значением эхо-сигнала, и соответственно их положение на временной ос
В оперативной памяти микро-ЭВМ 4 производится накопление определяемых и вычисляемых характеристик эхо-сигнала по каждому циклу зондирования, осуществляемому эхолотной системой 2. После подготовки информационной зоны характеристик эхо-сигнала микро-ЭВМ осуществляет управление регистрацией признакового массива на
магнитную ленту цифрового магнитног регистратора 9 с помощью схемы 8 управления записью информации на магнитную ленту.
В каждом цикле зондирования по сигналам синхронизации, поступающим от самописца 6 экспресс-информации производится опрос микро-ЭВМ 4, которая осуществляет вьадачу на caiMOписец 6 экспресс-информации через схему управления самописцем 7 экспресс-информации положения Максималных -значений огибающих эхо-сигналов на временной оси и длительность импульса регистрации, определяквдего ширину записи на бумажной ленте регистратора экспресс-информации, которая пропорциональна величине максимального значения огибакицей эхо-, сигнала, причем информация передаваемая микро-ЭВМ 4 на регистрацию относится к предыдущему циклу зондирования.
Использование способа упрощает регистрацию акустической информации на магнитной ленте при выполнении геофизических работ по геологическому картированию донных отложений , позволяет сократить объем регистрируемой информации и обеспечивает возможность регистрации из всего объема поступающей информации лишь той части, которая позволяет характеризовать свойства изучаемого геологического разреза. Уплотнение регистрируемой акустической информации позволяет сократить затраты на машинное время,необходимое на ввод результатов акустических исследований в ЦВМ,
Способ позволяет также улучшить качество регистрации информации на бумажной ленте экспресс-регистратора и дает возможность количественной оценки результатов акустическ 1х исследований по записям, полученным с помощью регистратора экспресс-информации.
Формула изобретения
Способ регистрации сигналов в эхолотных системах, включакяций определение времени прихода последовательности эхо-сигналов по предыдущей посылке, определение ожидаемых временных интервалов прихода последовательности эхо-сигналов по последующей посылке в регистрацию в выбранных ; временных интервалах последовательности эхо-сигналов по последующей посылке, отличающийся тем, то, с целью уменьшения объема регистрируемой информации и повышения ее информативности, определяют последовательности эхо-сигналов по последукицей посылке максимальные знаlertWH огибающих эхо-сигналов и ихположение на временной оси, вь числяют признаковые характеристики выбранных эхо-сигналов и регистрируют полученные характеристики эхо-сигналов на магнитной ленте, дополнительно осуществляют регистрацию этих параметров на бумажной ленте,причем
ширина записи на бумажной ленте пропорциональна величинам максимальных значений огибакяцих регистрируемых эхо-сигналов.
Источники информации, принятые во внимание при экспертизе
1. Квашин Е.В. и др.Системы ввода и обработки на ЭВМ сейсмической информации, Ташкент, Фан, с. 14-18. 2. Патент ФРГ 2735949,
кл. G 01 S 7/66, опублик, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации эхо-сигналов в многоканальных сейсмоакустических системах | 1981 |
|
SU981912A1 |
| Устройство регистрации сейсмоакустической системы | 1981 |
|
SU949588A1 |
| Аппаратура для геологического картирования на акваториях | 1982 |
|
SU1010584A1 |
| Аппаратура для структурно-литологического картирования донных отложений | 1980 |
|
SU900236A1 |
| Аппаратура для геологического картирования на акваториях | 1981 |
|
SU938232A1 |
| МНОГОЧАСТОТНЫЙ КОРРЕЛЯЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ | 2022 |
|
RU2795577C1 |
| Устройство для цифровой регистрации гидроакустической информации | 1980 |
|
SU911409A1 |
| Корреляционный способ измерения параметров тонкой структуры водной среды | 2022 |
|
RU2799974C1 |
| Устройство для распознавания подводных грунтов | 1981 |
|
SU989504A1 |
| Устройство для регистрации сигналов траловых зондов | 1976 |
|
SU641470A1 |