Изобретение относится к электроехнике, в частности к шаговыг/i электическим двигателям, которые находят ирокое применение в дискретном лектроприводе.
Известны шаговые электродвигатели, одержащие статор с двумя электроагнитами и подвижный якорь, связаный с ведомым валом при помощи меанизма свободного хода ij .
КПД данного двигателя невысок (, ак как часть энергии тратится на олостой ход якоря. Также невысок го удельный момент, что обусловлено конструктивнрлм выполнением ма. цепи.
Наиболее близким к предлагаемому по технической сущности является шаговый двигатель, содержащий статор с кольцевой обмоткой управления и магнитопроводом, подвижный якорь и механизм свободного хода с ведомым валом 2j .
Однако и этот двигатель имеет низкие КПД и удельный момент из-за необходимости преодоления силы проиводействующей пружины.
Цель, изобретения - повьш1ение КПД и удельного момента.
Поставленная цель достигается тем, что в шаговом двигателе якорь вьшолнен из двух частей,, первая часть состоит из двух жестко соединенных между собой немагнитной втулкой магнитопроводящих дисков, каждый из которых имеет по п выступов, образунлцих когтеобразные полюса, вторая часть якоря состоит из двух немагнитных дисков, между которыми по окружности равномерно расположено 2п полюсных наконечников, между ними установлено столько же постоянных магнитов, тангенциально намагниченных и действующих встречно, полюсные наконечники расположены между когтеобразными полюсами, причем обмотка управления расположена внутри якоря, а каждая часть якоря снабжена двумя дополнительными механизмами свободного хода, один из которых установлен между статором и частью якоря, а другой - между ней же
и ведомым валом, I
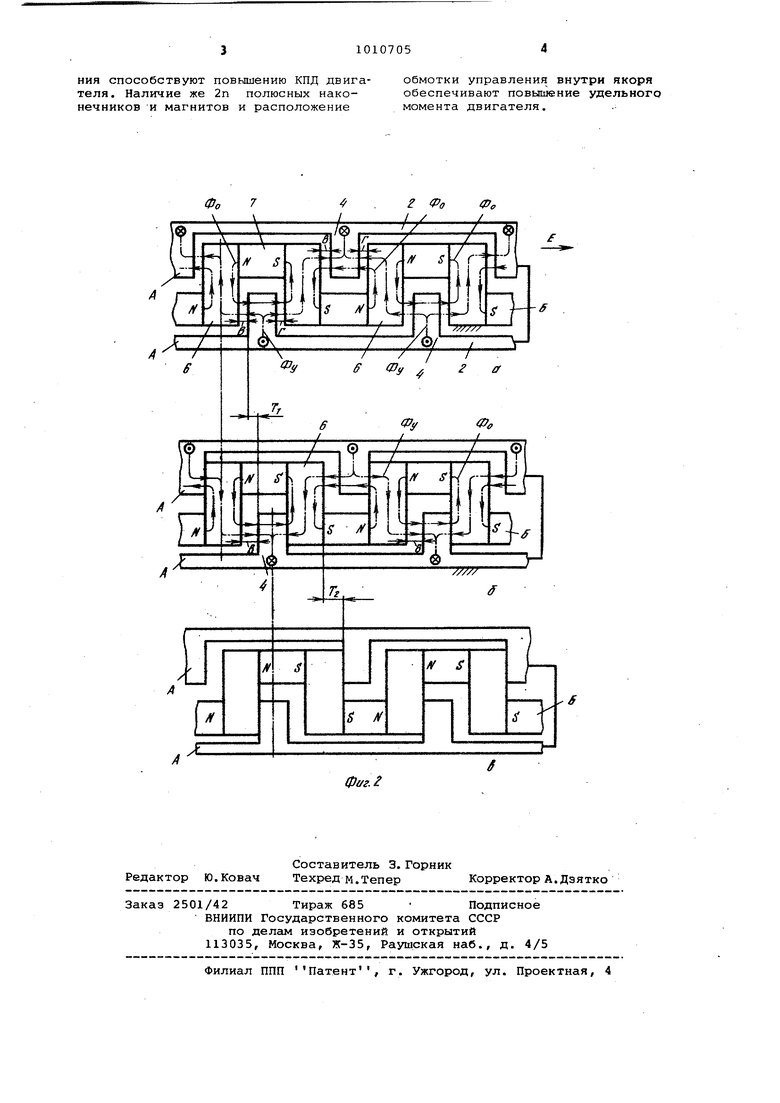
На фиг.1 изображен предлагаемый двигатель, продольный разрез; на фиг.2 - упрощенная развертка двигателя в зоне рабочих зазоров с указанием путей прохождения магнитных потоков,
Двигатель содержит статор с магнитопроводом 1 и якорь, состоящий из двух частей А и Б, первая из которых имеет два магнитопроводящих диска 2, соединенных немагнитной втулкой 3. На каждом диске имеются выступы 4, образунвдие когтеобразные полюса. Вторая часть якоря содержит два немагнитных диска 5, сс)едиЕ{енных между собой полюсными наконечниками б, к которым прилегают пост-оякные магниты 7 с указанным направлением намагничивания и полярностью. Обе части якоря устанолены Не), статоре с помощью подшипни ков 8, Кроме того, каждая из частей имеет по паре механизмов свободного хода, один из них 9.1 и 9.2 установлен.- : между частью якоря и статором, а другой ЮЛ и 10.2 -между ней же и ведомым валом 11. Внутри якоря размещена обмотка 12 управления. Механизмы свободного хода могут быть выполк-ен хт в виде подпружиненных клиньев (шариков, роликов и т.п.).
Двигатель работает следующим образом.
При подаче управляющего сигнала одной полярности в обмотку 12 управлен1-5я в магнитной цепи двигателя возникает магнитный поток Фу, путь которого показан на фиг.1 и 2. При направлениях магнитных потоков, соответствующих фиг,2а, в правых рабочих зазорах Г происходит суммирование магнитного потока Фу и потока постоянных магнитов Ф , а в левых рабочих зазорах В - их вьзгчитание, В результате создается усилие взаимного притяжения частей якоря в зазорах .Г. Благодаря механизмам свободного хода части якоря могут вращаться только в одну сторону, например, по стрелке Е. Усилие в зазоре Г действует на часть якоря Б в направлении, противоположном стрелке Е поэтому она оказывается неподвижной. На часть якоря А усилие действует гю напраБлению стрелки Е, поэтому она начнет перемещаться до соприкосновения с полюсными наконечниками 6, т.во на расстояние Т .
При изменении полярности управляющего сигнала магнитный поток Ф изменит свое направление на противоположное и суммирование потоков Фу и Фд будет происходить уже в левых рабочих зазорах, а в празых будет их вычитание, т.е. возникает усилие взаимного притяжения частей якоря в зазорах Е . При этом часть якоря А оказьюае1ся неподвижной, а часть якоря Б перемещается на расстояние Тл до соприкосновения с полюсными наконечниксгми 6. Тгшим образом, подача разнополярных импульсов на обмотку 12 приводит к шарообразному перемещению ведомого вала 11 в одном направлении.
Поскольку в предлагаемом двигателе отсутствует холостой ход якоря, а кинематическая энергия движущейся части якорк передается неподвижной, сообщая ей ускорение, то эти явления способствуют повышению КПД двигателя. Наличие же 2п полюсных наконечников и магнитов и расположение
обмотки управления внутри якоря обеспечивают повышение удельного момента двигателя. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Сверхпроводниковая синхронная электрическая машина с обмотками якоря и возбуждения в неподвижном криостате | 2017 |
|
RU2664716C1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836732A1 |
| Поворотный трансформаторный преобразователь | 1979 |
|
SU855751A1 |
| ШАГОВЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1995 |
|
RU2082276C1 |
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |
| Электрическая машина с разделенными магнитопроводами фаз | 1988 |
|
SU1580492A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ОБРАЩЕННАЯ СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2024 |
|
RU2829489C1 |
| Поляризованный электромагнит | 2019 |
|
RU2713626C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2837815C1 |
ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ, содержащий статор с кольцевой обмоткой управления и магнитопроводом, подвижный якорь и механизм свободного хода с ведомьм валом, отличающийся тем, что, с целью повышения его КПД и удельного момента, якорь выполнен из двух частей, пер-вая часть состоит из двух жестко соединенных между собой немагнитной втулкой магнитопроводящих дисков, каждый из которых имеет по п выступов, образующих когтеобразные полюса, вторая часть якоря состоит из двух немагнитных дисков, между которыми по окружности равномерно расположено 2п полюсных наконечников, между ними установлено столько же постоянных магнитов, тангенциально намагниченных и действующих встречно, полюсные наконечники расположены между когтеобразными полюсами, причем обмотка управления расположена внутри якоря, а каждая часть якоря снаб- с жена двумя дополнительными механизма- ® ми свободного хода, один из которых (Л установлен между статором и частью якоря, а другой - между ней же и ведомым валом. vj о ел
/Г
/Г
фиг. 2
If S
s
S ft
S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Мальцева В.Ф | |||
| Механические ш тульсные передачи | |||
| М., Машиностроение , с.10, рис.5 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Импульсные двигатели в системах автоматики | |||
| Отраслевой научнотехнический отдел информации и обобщения | |||
| М., 1962, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
