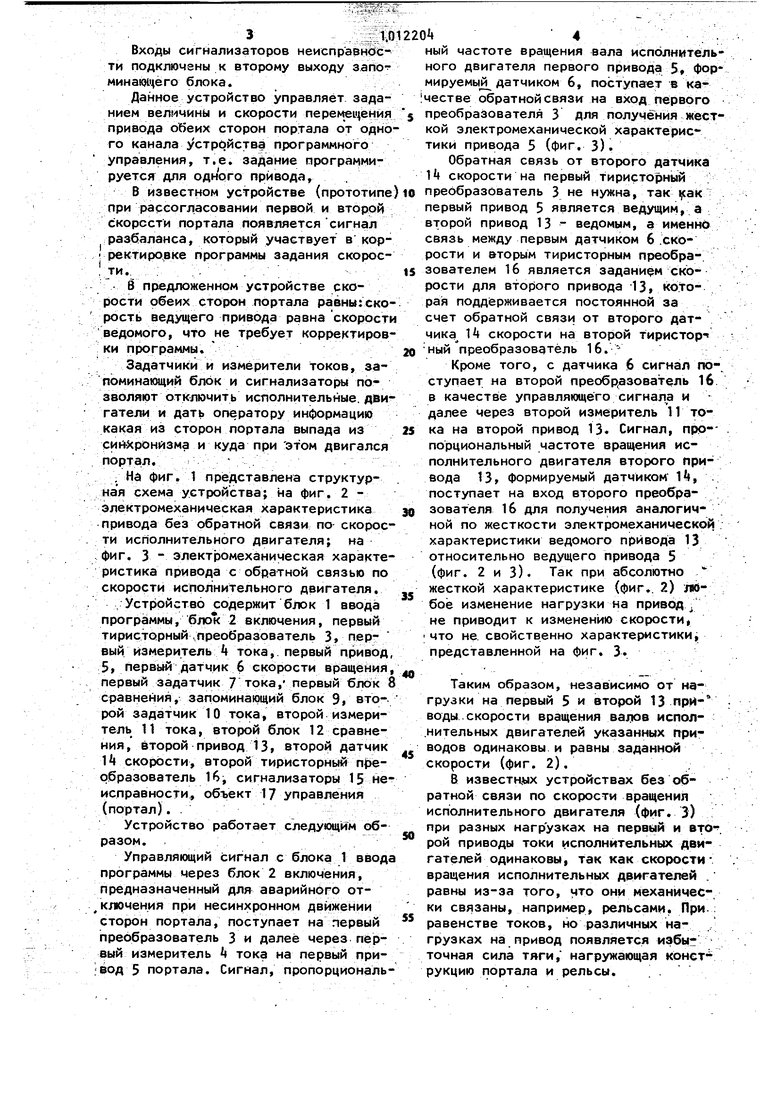
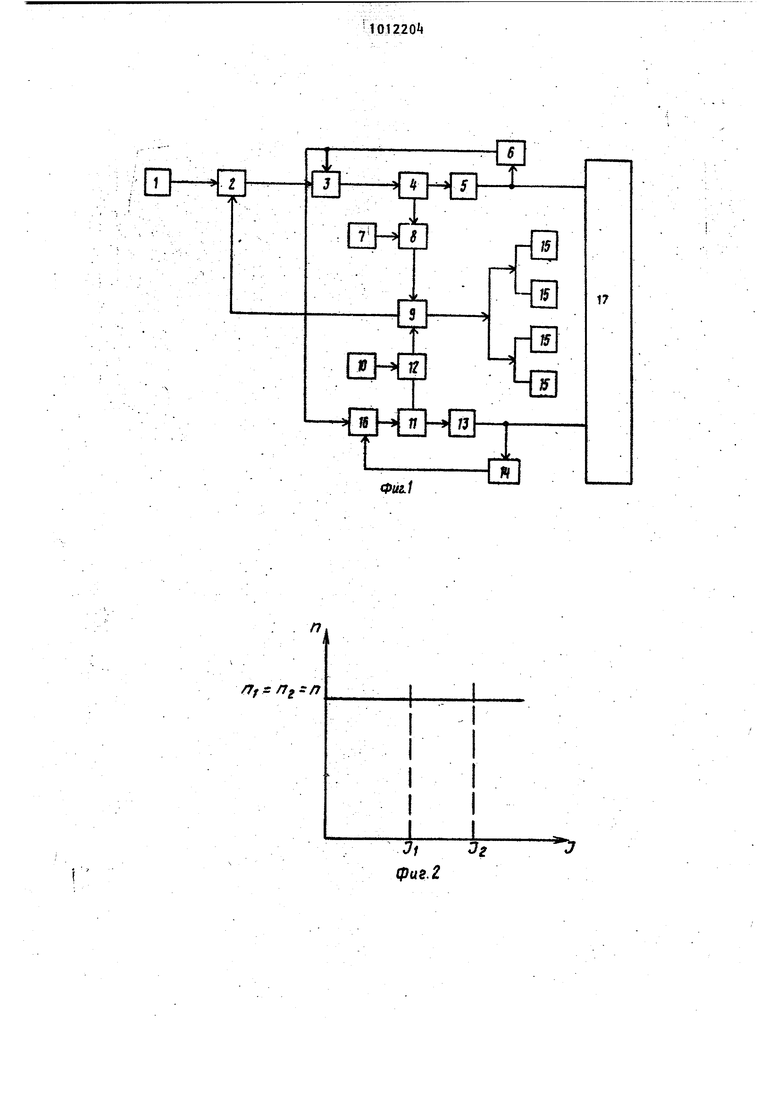
: Изобретение относится к автома; тике и может быть использовано в системах у|;1равления портальными конструкциями, а также а отраслях техНИКИ, где требуется синхронное пере,)ёиие по рельсам или направляющим двух или более объектов с меняющимис нагрузками на первый и второй привод портальной конструкции. Известно устройство синхронного управления станком с портальной конс рукцией, содержащее блок ввода программы, первый и второй приводы, под ключенные соответственно к первому и второму датчикам скорости вращения и первый и второй позиционные дат. чики, соединенные с входами преобразователя. Задание величины и скорости перемещения на оба привода осуществляется в данной системе от устройства числового программного управ ления независимо. Устройство регулирования равномерного хода управляетс сигналом рассогласований о положении обеих сторон портала. Фактически положение каждой стороны портала из.меряется соответствующим измерительным устройством tl 1. Поскольку для управления объектам требуются два самостоятельных канала формирования задания в устройстве числового программного управления, программирование перемещений по двер каналам и две следящие системы с дат чиками перемещения и соответствующими преобразователями их сигналов в виде, принимаемом устройством числового программного управления, такая система недостаточно надежна. При ВОЗМОЖНЫХ ошибках программирования в помехах в каналах задания информации о перемещении приводов портала в такой,.системе возникает постоянное рассогласование положений обеих сторон портала, особенно опасное при реверсах и динамических режимах работы Наиболее близким к изобретению является устройство для управления синхронно перемещающимися объектами, содержащее блок ввода программы, блок временной задержки, первый и второй приводы, объект управления (портал), первый и второй позиционные датчики первый и второй .датчики скорости, вращения, сумматор, преобразователь, блок сравнения. Известное устройство управляется заданием величины и скорости перемещения привода обеих сторон портала от одного канала устройст ва числового программного управления, т.е. задание програмиируется для одного привода. При этом используется только одна следящая система с датчйком перемещения и преобразователем. Зависимое управление скоростью привода второго конца портала от скорости привода первого конца портала обеспечивает защиту от появления постоянного рассогласования положений обеих сторон портала и от возможного аварийного режима Недостатком известного устрййства является его низкая надежность из-за отсутствия контроля за нагрузками первого и второго привода, а также ограниченная функциональная возможность из-за отсутствия связи датчика скорости с преобразователем, что не позволяет при различных нагрузках на приводы синхронизировать движение объекта управления. Цель изобретения - повышение надежности устройства. Поставленная цель достигается тем что в устройство содержащее первый и второй блоки сравнения, первый привод, выходом через первый датчик скорости вращения соединенный с первым входом первого и.второго тиристорных преобразователей, второй вход второго тиристорного преобразователя чёре1з второй датчик скорости вращения подключен к выходу второго привода, и последовательно соединенные блок, ввода программы и блок включения, выход которого подключен к второму входу первого тиристорного преобра-. зователя, введены запоминающий,блок, первый и второй задатчики тока, сигнализаторы неисправности, первый и второй измерители тока, второй измеритель тока входом соединен с выходом второго тиристорного преобразователя, первым выходом - с входом второго привода, а вторым выходом через второй блок сравнения с первым входом запоминающего блока, первый выход которого соединен с вторым входом блока включения, а второй вход с выходом первого блока сравнения, первым входом подключенного к выходу первого задатчика тока, вторым вхо- . дом V выходу первого измерителя тока, вtopoй выход которрго соединен с вдодом первого привода, а вход - с выходом первого тиристорного преобразователя. Входы сигнализаторов неисправности подключены к второму выходу запоминающего блока. Данное устройство управляет заданием величины и скорости перемещения привода обеих сторон портала от одно го канала устройства программного управления, т.е. задание программируется для одного привода, В известном устройстве (прототипе при рассогласовании первой и второй скорости портала появляется сигнал разбаланса, который участвует в кор ректиро.вке программы задания скорос JM.. : : . ;. . . ; -.- . 8 предложенном устрюйстве скорости обеих сторон портала равны:ско рость ведущего привода равна скорост ведомого, что не требует корректиров ки программы. Задатчики и измерители токов, запоминающий блок и сигнализаторы позволяют отключить исполнительные, двигатели и дать оператору информацию какая из сторон портала выпада из сий-Хронйзма и куда при этом двигался порта1Л. .Ни фиг. 1 представлена структурная схема устройства; на фиг. 2 электромеханическая характеристика привода без обратной связи по- скорос ти исполнительного двигателя; на .фиг. 3 электромеханическая характеристика привода с обратной связью по скорости исполнительного двигателя. .Устройство содержит блок 1 ввода программы, блок 2 включения, первый тиристорный.преобразователь 3, парвый измеритель 4 тока,, первый привод 5 первый датчик 6 скорости вращения первый задатчик 7 тока, первый блок сравнения, запоминающий блок Э, второй задатчик 10 тока, второй измеритель 11 тока, второй блок 12 сравнения, второй привод 13, второй датчик 14 скорости, второй тиристорный преобразователь 16; сигнализаторы 15 не исправности, объект 17 управления (портал). . Устройство работает следующим образом. Управлящий сигнал с блока 1 ввод программы через блок 2 включения, предназначенный для аварийного от ключения при несинхронном движении сторон портала, поступает на первый преобразователь 3 и далее через первый измеритель t тока на первый при;вод 5 портала. Сигнал, пропорциональ ый частоте вращения вала исполнительного двигателя первого привода 5, форируемы датчиком 6, поступает в каестве обратной связи на вход первого преобразователя 3 для получения жёсткой электромеханической характеристики привода 5 (фиг. 3). Обратная связь от второго датчика 1k скорости на первый тиристорный преобразователь 3 не нужна, такч(сак первый привод 5 является ведущим, а второй привод 13 - ведомым, а именно связь между первым датчиком 6 .скорости и вторым тиристорным преобра-; зователем 16 является заданием скорости для второго привода 13, KOi.Toрая подд1ерживается постоянной за счет обратной связи от второго датчика 1 скорости на второй Тиристор- ныйпреобразователь 16. Кроме того, с датчика 6 сигнал поступает на второй преобразователь 16. в качестве управляющего сигнала и далее через второй измеритель 11 тока на второй привод 13. Сигнал, пропорциональный частоте вращения исполнительного двигателя второго привода 13, формируемый датчиком 1, : поступает на вход второго преобразователя 16 для получения аналогичной по жесткости электромеханической характеристики ведомого привода 13 относительно ведущего привода 5 (фиг. 2 и 3). Так при абсолютно жесткой характеристике (фиг.. 2) либое изменение нагрузки на привод , не приводит к изменению скорости, что не. свойственно характер 1стики, представленной на фиг. 3. Таким образом, независимо от нагрузки на первый 5 и второй 13 прИ- воды.скорости вращения валов испол.нительных двигателей указанных приводов одинаковы и равны заданной скорости (фиг. 2). В известных устройствах без обратной связи по скорости вращения исполнительного двигателя (фиг. 3) при разных нагрузках на первый и BTO. рой приводы токи исполнительных двигателей одинаковы, так как скорости вращения исполнительных двигателей . равны из-за того, что они механически связаны, например, рельсами. При.: равенстве токов, но различных нагрузках на привод появляется избыг точная сила тяги, нагружающая конструкцию портала и рельсы. , . Контроль синхронности движения приводов невозможен в известном устройстве, так как скорости и трки рав ны из-за механической связи. В данном устройстве скорости движения приводов также равны, но это определено схемным решением устройства, т.е. обратной связью между датчиками итиристорными преобразовав телями, поддерживающими заданную скорость. В зависимости о г нагрузки на первый привод 5 задается уставка тока задатчику 7 тока и сравнивается с сигналом измерителя тока блоком 8 сравнения. Аналогично в зависимости от нагрузки второго привода 13 задается уставка тока задатчиком 10 тока и сравнивается с сигналом измерителя 1 1 тока блоком 12 сравнения В первый момент времени сигнал за дания скорости поступает от блока 1 ввода программы на первый тиристорный .преобразователь 3, далее через первый измеритель 4 тока на ведущий привод 5. который приводит в движение последний. Помимо этого сигнал обратной связи с первого датчика 6 поступает на вход первого тиристррного преобразователя 3 для поддержания постоянной скорости и далее на второй тиристорный преобразователь 16 и через второ измеритель 11 тока на ведомый привод 13, что приводит в движение последНИИ, который начинает двигаться синхронно с ведущим приводом 5. Для поддержания синхронизма обеих сторон портала и для сглаживания процессов динамики между временам срабатывания ведущего 5 и ведомого 13 приводов в блоке 1 задания про,граммы предусмотрены корректирующие цепочки, которыми в процессе наладки можно отрегулировать во времени плав мое нарастание задания скорости. В аварийном случае, когда имеется разбаланс токов, заданного и измеряемого, первого или второго приводо с блоков 8 или 12 сравнения поступает сигнал на запоминающий блок 9 который выдает сигнал на блок 2, останавливая первый и второй приводы. 5 и 13, и на сигнализаторы 15 нбi исправности. Сигнал (информация) о рассинхронизации в аварийном случае с запоминающего блока 9 поступает на сигнализаторы 15 неисправности в следующей последовательности: движение ведущего привода j вперед сигнализируется горением верхней лампы (фиг. 1, сигнализатор 15) ровным светом; движение ведущего привода 5 назад - горением второй сверху лампой (фиг. 1, сигнализатор 15) ровным светом; движение ведомого привода 13 вперед - горением третьей сверху лампы ровным светом; движение ведомого привода 13 назад - четвертой сверху лампой ровным светом. Таким образом, оператор наглядно имеет информацию о том, какой из приводов 5 или 13 вышел из синхронизма ПО-горению лампы (сигнализатор 15) и в какую сторону двигался портал: вперед или назад. Таким образом, введение связи между датчиками скорости исполнительных двигателей и тиристорными преобразователями позволяет получить характеристики первого и второго приводов, установленных на разных сторонах портала, близких к абсолютно жесткой. Заданная скорость сторон портала получается практически независимой от нагрузки, что значительно увеличивает функциональные возможности устройства в целом. Изгибающий момент на конструкцию, соединяющую первую и вторую стороны портала, отсутствует, что, кроме того, позволяет облегчить портальную конструкцию. Отсутствует также боковая нагрузка на рельсы, по которым движется портал, что устраняет дополнительный износ последних. Введение задатчиков и измерителей токов, запоминающего блока и сигнализаторов неисправности позволяет увеличить надежность устройства для уп-. равления синхронного перемещающимися объектами, в случае выпадения одной из сторон портала из синхронизма срабатывает запоминающий блок, который отключает исполнительные двигатели и дает оператору информацию о том, какая из сторон портала выпада из синхронизма и куда при этом двигался портал. Это позволяет значительно сократить cpoKHi приска и устранения неисправности, т.е. увеличить надежность работы устройства, повысить технико-экономический эффект от его использования.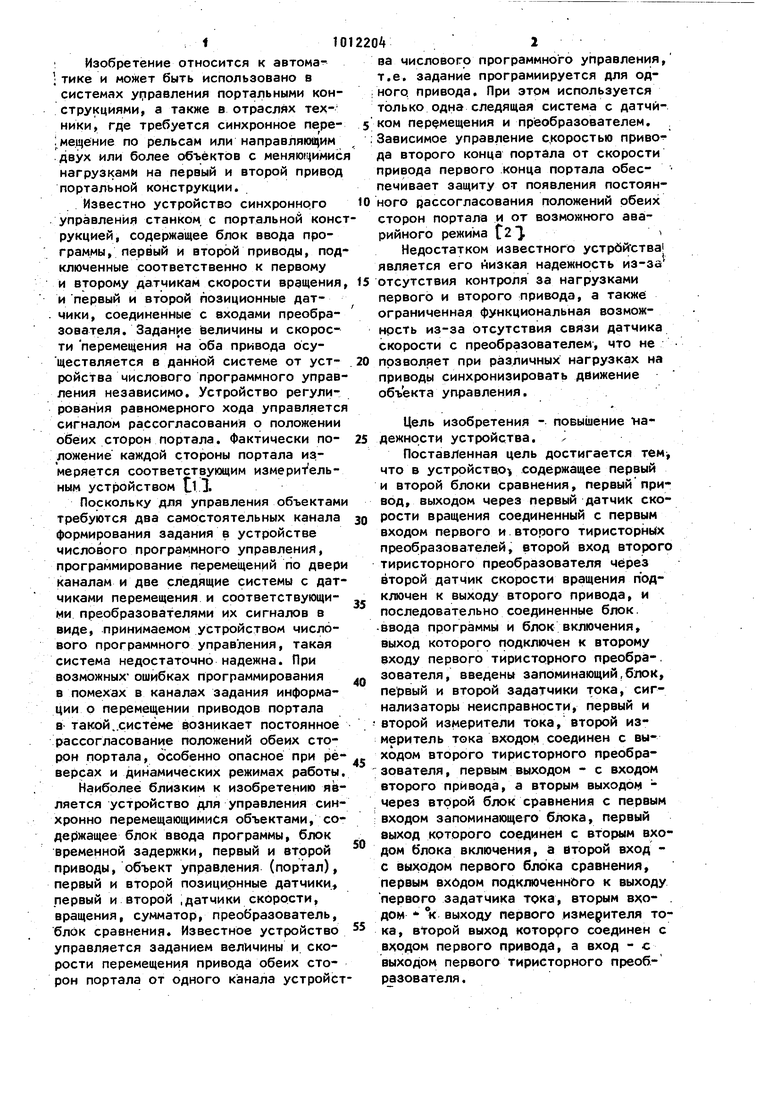

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления натяжением при намотке рулонного материала | 1989 |
|
SU1687550A1 |
| СТЕНД ОБКАТКИ АВТОТРАКТОРНЫХ ДВИГАТЕЛЕЙ | 1994 |
|
RU2105176C1 |
| ТРЕХФАЗНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2002 |
|
RU2231203C2 |
| Устройство для управления синхронно перемещающимися объектами | 1984 |
|
SU1226411A1 |
| Устройство регулирования электрической мощности переменного тока | 1991 |
|
SU1830523A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
| Стенд для испытания двигателя внутреннего сгорания | 1982 |
|
SU1052912A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2380821C2 |
| Вентильный электропривод постоянного тока | 1981 |
|
SU974535A1 |
fjff
фаг. 2
ffrn
Фиг.3
