Изобретение относится к автоматик н Может быть использовано в системах управления портальными конструкциями а также в отраслях техники, где требуется синхронное перемещение по рель сам или направляющим двух или более объектов с меняющимися нагрузками на -первый и второй привод портальной конструкции.
Цель изобретения - .повышение точ- ности управления синхронно перемеща- нлцихся объектов.
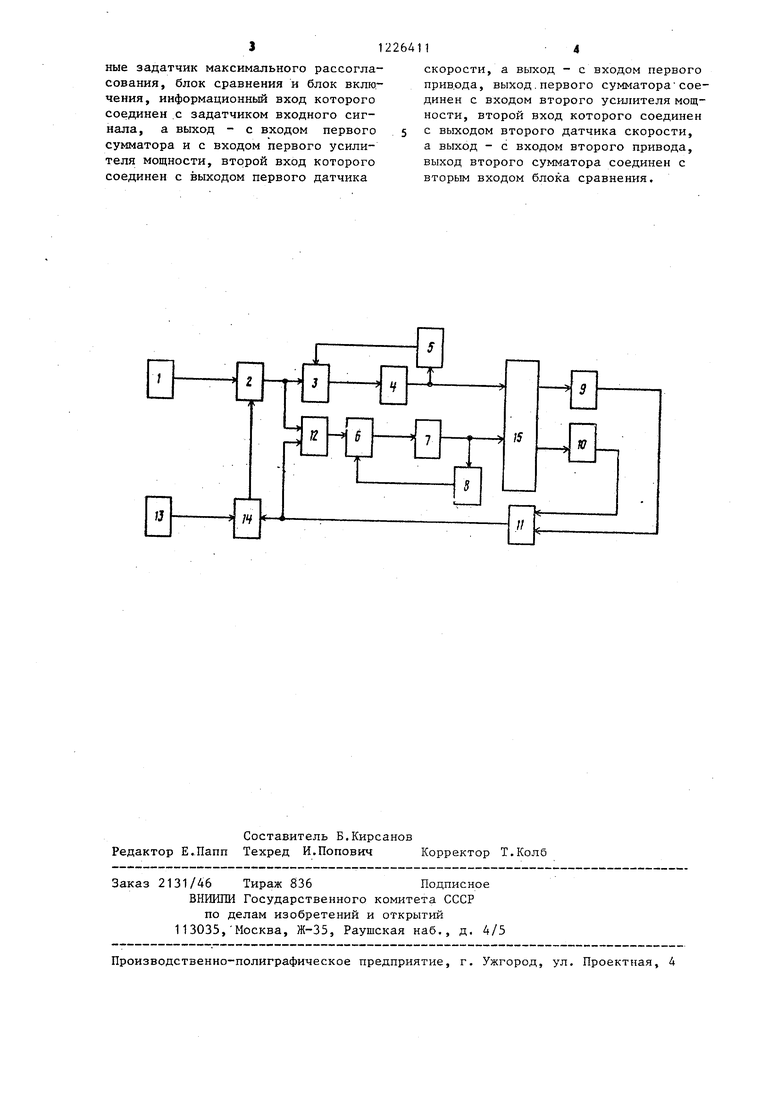
На чертеже представлена блок-схем устройства.
Устройство содерлшт задатчик 1 входного сигналаэ блок 2 включения, первый усилитель 3 мощности, первый привод 4, первый датчик 5 скорости вращения,- второй усилитель 6 мощности, второй привод 7, второй датчик 8 скорости вращения, первый 9 и второй 10 позиционные датчики, второй 11 и первый 12 сумматоры, задатчик 13 максимального рассогласования, бхюк 14 сравнения, портал 15,
Позиционные датчики 9 и 10 представляют собой устройства, преобразующие линейные перемещения :з цифровые коды. Второй сумматор 11 состоит из устройства вычитания, к входу которого подключен цифроаналоговьш преобразователь.
Устройство работает следующим образом.
Управляющий сигнал в виде программы с задатчика 1 входного сигнала поступает через блок 2 включения на первый 3 усилитель мощности и является заданием скорости для первого привода 4. Сигнал обратной связи поступает на первый 3 усилитель мощности от первого 5 датчик; скорости вращения,. Первый 9 и второй 10 позиционные датчики предназначены дпя измерения линейных перемещений первой и второй сторон портала 15. Сигналы первого 9 и второго 10 датчиков поступают на второй сумматор 11, с выхода которого сигнал, пропорциональный разности линейных перемещений, поступает на входы первого 12 сумматора и блока 14 сравнения. В последнем сигнал от второго сумматора 11 сравнивается с сигналом, поступающим от задатчика 13 максимального рассогласования. Если сигнал рассогласования больше заданного, то блок 2 включения отклю
0
0
чает приводы. Кроме сигнала, пропорционального рассогласованию линейных перемещений первой и второй сторон портала 15, в первый сумматор 12 поступает управляющий сигнал от задатчика 1 через блок 2. Сигнал с выхода первого сумматора 12 поступает на второй 6 усилитель мощности и является заданием скорости для второго привода 7. Сигнал обратной связи поступает с выхода второго датчика 8 скорости вращения на второй усилитель 6 мощности. Если в процессе движения портала 15 происходит рассогласование линейных перемещений первой и второй сторон, то величина сигнала, поступающего с выхода первого сумматора 12 возрастает, если сторона портала 15, движимая за счет второго привода 7, отстает от стороны портала 15, движимой за счет первого привода 4.
Таким образом, одним из условий,
- обеспечивающим высокую точность синхронного перемещения сторон портала 15, является наличие цепочки, сос тоящей из первого 9 i второго 10 позиционных датчиков, второго 11 и первого 12 сумячаторов, обеспечлваклцей коррекцию скорости перемещения одной из сторон портала в зависимости от рассогласования.
:,,г,
Вторым преимуществом предлагаемого устройства является более высокое быстродействие. Оно обеспечивается теМр что управляющий сигнал поступает одновременно на первый 3 и второй 6 усилители тиристора мощности,
Ф о 11 м у л а изобретения
Устройство для зшравления синхронно перемещающимися объектами, содержащее задатчик входного сигнала,первый и второй приводы, соединенные соответственно с первым и вторым дат- г иками скорости и с первым и вторым входами объекта (портала), соответствующие выходы которого соединены с первым и BTopbiM позиционными датчиками, выходд которых соединены с входами второго сумматора, выход которого соединен с входом первого сумматора, отличающееся тем, что, с целью увеличения точности регулирования., в него дополнительно введены первый и второй усилители мощности и последовательно включенные задатчик максимального рассогласования, блок сравнения и блок включения, информационный вход которого соединен .с задатчиком входного сигнала, а выход - с входом первого сумматора и с входом первого усилителя мощности, второй вход которого соединен с выходом первого датчика
скорости, а выход - с входом первого привода, выход.первого сумматорасоединен с входом второго усилителя мощности, второй вход которого соединен с выходом второго датчика скорости, а выход - с входом второго привода, выход второго сумматора соединен с вторым входом блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления синхронно перемещающимися объектами | 1981 |
|
SU1012204A1 |
| Устройство для управления уровнем металла в кристаллизаторе установки непрерывной разливки стали | 1982 |
|
SU1052317A1 |
| Устройство для регулирования давления в декомпрессионной камере | 1979 |
|
SU862123A1 |
| Устройство для управления синхронно перемещающимися объектами | 1977 |
|
SU739477A1 |
| Позиционный регулятор для систем с запаздыванием | 1987 |
|
SU1427328A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Устройство для спектрального анализа колебаний узлов машин | 1975 |
|
SU610000A1 |
| Следящая система | 1985 |
|
SU1368855A1 |
| Устройство для термообработки сварныхшВОВ | 1977 |
|
SU840163A1 |
| Система регулирования давления газа | 1986 |
|
SU1425620A1 |
Изобретение может быть использовано в системах управления портальными конструкциями. Устройство предназначено для обеспечения высокой точности и быстродействия пере- . мещения двух объектов, которые должны двигаться синхронно, например стороны портала. Устройство содержит: за- датчик входного сигнала, блок включения, первый усилитель мощности, первый привод, первый датчик скорости вращения, второй усилитель мощности, второй привод, второй .датчик скорости вращения, первьш позиционный датчик, второй позиционный датчик, второй сумматор, первый сумматор, задатчик максимального рассогласования, блок сравнения, портал. Б устройство введены Первый и второй позиционные датчики, которые позволяют существенно уменьшить позиционную ошибку управления двумя сторонами портала, блок включения, которьй позволяет при достижении позиционного рассогласования сторон портала, выделяемого на выходе второго сумматора, величины сигнала с задатчик-а мак- .симального рассогласования отключать сигнал с задатчика входного сигнала. Высокая точность и быстродействие достигаются за счет большого коэффициента усиления контуров отработки скорости и за счет наличия корректирующего сигнала на входе .первого сумматора с выхода второго сумматора. 1 ил. i (Л ьо О5 4
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления синхронно перемещающимися объектами | 1977 |
|
SU739477A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
