Изобретение относится к электротехнике и предназначено для использования в электроприводах, работающих без постоянного квалифицированного техухода в условиях вибраций, тряски, большой запыленности, характерных для электроприводов одноковшовых экскаваторов.
Известно [1] устройство непосредственных преобразователей частоты (НПЧ), содержащее силовой блок из 18-ти вентилей с реверсивной нулевой схемой выпрямления или с реверсивной мостовой (двухмостовой) схемой выпрямления, содержащее трехфазный четырехобмоточный силовой трансформатор (или три трехобмоточных трансформатора), силовой блок с 36 (72) вентилями и единую систему импульсно-фазового управления всеми вентилями в соответствии с заложенным алгоритмом управления преобразователем частоты.
Недостатками устройства являются сниженная помехозащищенность, многокомпонентность, сложность наладки и эксплуатации, увеличенное время восстановления работоспособности привода при отказах электроники.
Известно [2] устройство трехфазных непосредственных преобразователей частоты с естественной коммутацией для асинхронного электропривода, содержащее 18 силовых тиристоров и единую систему импульсно-фазового управления напряжением и частотой асинхронного двигателя. Повышение качества регулирования частоты достигается за счет увеличения числа элементов и соединений преобразователя, повышается сложность наладки и эксплуатации, возрастают простои машин при отказах электроники.
Техническая задача, решаемая изобретением, состоит в упрощении наладки и эксплуатации преобразователя частоты, в повышении надежности работы электроприводов в полевых условиях без постоянного квалифицированного техухода и в сокращении простоев при отказах электроники.
Указанная техническая задача решается тем, что в известном трехфазном непосредственном преобразователе частоты с естественной коммутацией для асинхронного электропривода, содержащем силовые тиристоры и единую систему импульсно-фазового управления напряжением и частотой асинхронного двигателя, каждая фаза выполнена в виде автономно управляемого моноблочного тиристорного преобразователя постоянного тока с трехфазной нулевой реверсивной схемой выпрямления, устройство снабжено задающим генератором, импульсным датчиком положения ротора асинхронного двигателя, двумя автоматическими выключателями, силовые входы тиристорного преобразователя через первый автоматический выключатель подключены к трехфазной сети, а силовой выход подключен к соответствующей фазе асинхронного двигателя, входы синхронизации преобразователя и задающего генератора через второй автоматический выключатель также подключены к трехфазной сети, первый вход управления преобразователем данной фазы подключен к первому выходу задающего генератора, второй вход подключен ко второму выходу задающего генератора, первый и второй входы управления преобразователей других фаз подключены к третьему, четвертому, пятому и шестому выходам задающего генератора, причем задающий генератор содержит цифровое вычислительное устройство, восемь цифроаналоговых преобразователей, один аналого-цифровой преобразователь, интегратор, регулятор момента и регулятор скорости, один вход вычислительного устройства предназначен для задания потока двигателя, второй вход соединен с выходом аналого-цифрового преобразователя задания скорости, третий и четвертый входы предназначены для ввода значений активного и индуктивного сопротивлений фаз двигателя, пятый вход соединен с выходом импульсного датчика положения ротора, первый, второй, третий, четвертый, пятый и шестой выходы через цифроаналоговые преобразователи соединены с соответствующими выходами задающего генератора, седьмой выход через цифроаналоговый преобразователь соединен со вторым входом регулятора момента, первый вход которого соединен с выходом регулятора скорости, а выход - с входом интегратора, восьмой выход через цифроаналоговый преобразователь соединен со вторым входом регулятора скорости, первый вход которого соединен с выходом задатчика скорости.
Кроме того, поставленная техническая задача решается тем, что цифровое вычислительное устройство содержит блок вычисления заданных значений напряжений, блок координатных и блок фазных преобразований заданных значений напряжений, блок вычисления заданных значений токов, блок координатных и блок фазных преобразований заданных значений токов, блок вычисления скорости двигателя, блок вычисления абсолютного скольжения и блок вычисления момента, первый и второй входы цифрового вычислительного устройства соединены с первым и вторым выходами блока вычисления заданных значений токов, третий и четвертый входы предназначены для ввода значений активного и индуктивного сопротивлений фаз двигателя, первый и второй выходы соединены с первым и вторым входами блока координатных преобразований напряжений, третий вход которого через аналого-цифровой преобразователь соединен с выходом интегратора, а первый и второй выходы соединены с первым и вторым входами блока фазных преобразований напряжений, первый, второй и третий выходы которого через цифроаналоговые преобразователи соединены с первыми входами управления силовых преобразователей соответствующих фаз непосредственного преобразователя частоты, первый вход блока вычисления заданных значений токов предназначен для ввода заданного значения потока двигателя, второй вход соединен с выходом блока вычисления абсолютного скольжения, первый вход которого соединен с выходом блока вычисления скорости двигателя, а второй вход через аналого-цифровой преобразователь подключен к выходу интегратора, вход которого соединен с выходом регулятора момента двигателя, первый и второй выходы блока вычисления заданных значений токов соединены с первым и вторым входами блока координатных преобразований токов, третий вход которого через аналого-цифровой преобразователь соединен с выходом интегратора, а первый и второй выходы соединены с первым и вторым входами блока фазных преобразований токов, первый, второй и третий выходы которого через цифроаналоговые преобразователи соединены со вторыми входами управления силовых преобразователей соответствующих фаз непосредственного преобразователя частоты, вход блока вычисления момента соединен с выходом блока вычисления абсолютного скольжения, а выход через цифроаналоговый преобразователь соединен со вторым входом регулятора момента.
Кроме того, поставленная техническая задача решается тем, что оно дополнительно снабжено четырехобмоточным силовым трансформатором, а каждая фаза преобразователя частоты снабжена дополнительным автономно управляемым моноблочным тиристорным преобразователем постоянного тока с трехфазной нулевой реверсивной схемой выпрямления, при этом один из преобразователей выполнен ведущим, а второй - ведомым и силовые входы ведущего и ведомого преобразователей постоянного тока каждой фазы подключены к соответствующей вторичной обмотке четырехобмоточного силового трансформатора, силовые выходы ведущих преобразователей постоянного тока соединены в звезду, а силовые выходы ведомых преобразователей постоянного тока подключены к соответствующим фазам асинхронного двигателя, входы управления ведомого преобразователя соединены с входами управления ведущего.
Кроме того, поставленная техническая задача решается тем, что каждая фаза непосредственного преобразователя частоты дополнительно снабжена трехобмоточным силовым трансформатором и первым, вторым и третьим дополнительными преобразователями постоянного тока с трехфазной нулевой реверсивной схемой выпрямления, которые выполнены ведомыми по отношению к основному преобразователю, выполненному ведущим, при этом силовые входы ведущего и первого ведомого преобразователей постоянного тока каждой фазы подключены к первой вторичной обмотке силового трансформатора, а силовые входы второго и третьего ведомых преобразователей постоянного тока подключены ко второй вторичной обмотке силового трансформатора, при этом силовые выходы ведущих преобразователей постоянного тока трех фаз соединены в звезду, выходы первого и второго ведомых преобразователей постоянного тока в каждой фазе соединены между собой, а выходы третьих ведомых преобразователей постоянного тока каждой фазы соединены с соответствующими фазами асинхронного двигателя, входы управления ведомых преобразователей постоянного тока каждой фазы соединены с входами управления ведущего преобразователя в каждой фазе.
Схема устройства представлена на чертежах. На фиг.1 представлена трехфазная нулевая схема непосредственного преобразователя частоты (НПЧ), на фиг.2 - трехфазная мостовая шестипульсная схема НПЧ; на фиг.3 - трехфазная двухмостовая 12-пульсная схема НПЧ.
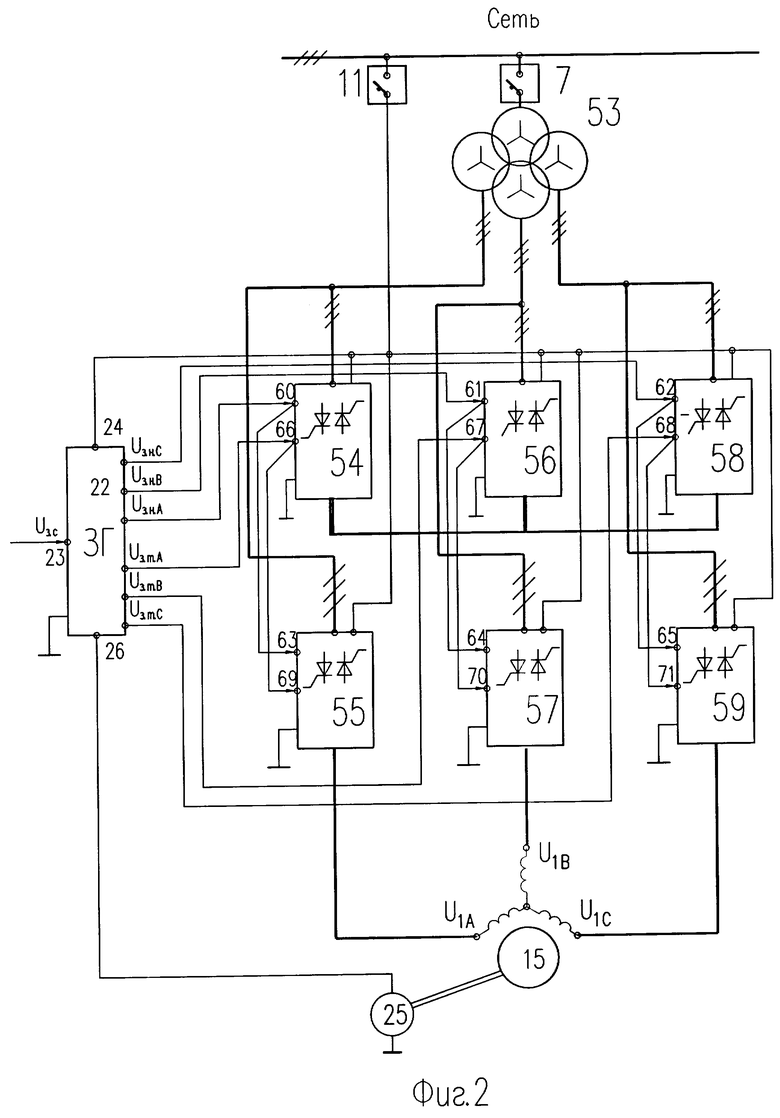
Представленный на фиг.1 непосредственный преобразователь частоты выполнен по трехфазной нулевой схеме без нулевого провода и состоит из трех автономно управляемых моноблочных тиристорных преобразователей постоянного тока 1, 2, 3 с трехфазной нулевой реверсивной схемой выпрямления, силовые входы 4, 5, 6 которых через силовой автомат 7 и синхронизирующие входы 8, 9, 10 через автомат 11 подключены к трехфазной сети, а выходы 12, 13, 14 - к соответствующим фазам обмотки статора асинхронного двигателя 15, входы 16, 17, 18 моноблочных тиристорных преобразователей по каналам задания напряжений фаз двигателя (UзнA, UзнB, UзнC и входы 19, 20, 21 каналов задания на логику раздельного управления моноблочных тиристорных преобразователей подключены к соответствующим выходам задающего генератора 22, вход 23 которого подключен к выходу задатчика скорости, а вход 24 через автомат 11 подключен к сети. Выход импульсного датчика 25 положения ротора соединен с входом 26 задающего генератора, который содержит цифровое вычислительное устройство 27, вход 28 которого предназначен для задания потока двигателя, входы 29, 30 - для задания значений активного R1 и индуктивного x1 сопротивлений двигателя, а вход 31 через аналого-цифровой преобразователь (АЦП) 32 соединен с выходом интегратора 33. Один выход блока 34 вычисления скорости асинхронного двигателя ωэл подключен к первому входу блока 35 вычисления абсолютного скольжения Sа, первый выход которого соединен с входом блока 36 вычисления момента, а второй выход с входом блока 37 вычисления заданных значений токов в осях x, y, ilхз и ilуз, второй выход блока 34 через цифроаналоговый преобразователь (ЦАП) 38 подключен ко второму входу регулятора скорости 39, выход которого соединен с первым входом регулятора момента 40, а вход с выходом задатчика скорости, выход блока 36 вычисления момента через ЦАП 41 соединен со вторым входом регулятора момента 40, выход которого соединен с входом интегратора 33. Первый и второй входы блока 42 вычисления заданных напряжений в осях x, у, Ulхз и Ulуз соединены соответственно с входами 29 и 30 вычислительного устройства 27, а третий и четвертый входы блока 42 вычисления заданных напряжений в осях x, у, Ulхз и Ulуз соединены соответственно с первым и вторым выходами блока 37 вычисления заданных значений токов в осях x, у, ilхз ilуз, пятый вход блока 42 соединен через вход 31 вычислительного устройства 27 и через ЦАП 32 с выходом интегратора 33. Первый и второй входы блока 43 координатных преобразований токов от осей x, у к осям α, β соединены с первым и вторым выходами блока 37, третий вход блока 43 соединен с входом 31 вычислительного устройства 27, первый и второй выходы блока 43 соединены с первым и вторым входами блока 44 двухфазно-трехфазных преобразований токов, а первый, второй и третий выходы блока 44 через ЦАП 45, 46, 47 подключены к входам 19, 20, 21 логики раздельного управления моноблочных тиристорных преобразователей постоянного тока.
Первый и второй входы блока 48 координатных преобразований напряжений от осей x, y к осям α, β соединены с первым и вторым выходами блока 42 вычисления заданных напряжений в осях x, y, Ulхз и Ulуз, а третий вход блока 48 подключен к входу 31 вычислительного устройства 27, первый и второй выходы блока 48 подключены к первому и второму входам блока 49 двухфазно-трехфазных преобразований напряжений, а первый, второй и третий выходы блока 49 через ЦАП 50, 51, 52 соединены с входами 16, 17, 18 управления напряжением моноблочных тиристорных преобразователей постоянного тока 1, 2, 3.
Схема работает следующим образом.
При включении преобразователя вначале включается выключатель 11, на входы 8, 9, 10 цепей управления преобразователей 1, 2, 3 и на вход 24 задающего генератора 22 подается напряжение, по сигналам устройства самодиагностики проверяется исправность преобразователей, затем включается силовое напряжение выключателем 7, по сигналам самодиагностики подтверждается исправность моноблочных тиристорных преобразователей постоянного тока - преобразователь частоты готов к работе. Сигнал задания скорости электропривода Uз.c поступает на вход 23 задающего генератора 22, в соответствии с заложенным алгоритмом управления на выходах задающего генератора формируются синусоидальные сигналы напряжений UзнА, UзнВ, UзнС и токов UзmA, UзmB,UзmC, которые определяют напряжения UlA, UlB, UlC фаз статора асинхронного двигателя 15 и синусоидальные сигналы управления логикой - осуществляется разгон привода до заданной скорости по экскаваторной механической характеристике, которая формируется ограничением сигнала Δω на выходе регулятора скорости 39, задающего момент двигателя. Сигналы задания потока ψl и абсолютного скольжения sa используются для вычисления в синхронных осях x, y (ωк=ω0эл) ориентированных по полю значений намагничивающего тока ilхз и активного тока ilуз, которые при заданных Rl, xl совместно со значениями сигналов управления частотой и абсолютного скольжения используются для вычисления ориентированных по полю сигналов задания напряжения фаз двигателя. Сигналы задания токов и напряжений после выполнения координатных и фазных преобразований поступают на соответствующие выходы задающего генератора. Сигнал задания скорости электропривода поступает на вход регулятора 39 скорости, регулятор скорости по сигналу обратной связи по скорости определяет задание момента двигателя, которое поступает совместно с сигналом обратной связи по моменту на вход регулятора 40 момента, выход которого через интегратор 33 воздействует на вход управления частотой.
При отказе любого моноблочного тиристорного преобразователя постоянного тока по сигналам самодиагностики оператор технологической машины (например, машинист экскаватора) определяет неисправный блок. Моноблочные тиристорные преобразователи постоянного тока 1, 2, 3 не требуют наладки, поэтому в соответствии с инструкцией оператор (машинист экскаватора) заменяет неисправный моноблочный тиристорный преобразователь резервным и продолжает работу. Таким образом, благодаря блочно-модульному принципу и безналадочности моноблочных тиристорных преобразователей постоянного тока устройство упрощает наладку и эксплуатацию и повышает надежность работы, практически исключая простои машин при возможных отказах электроники.
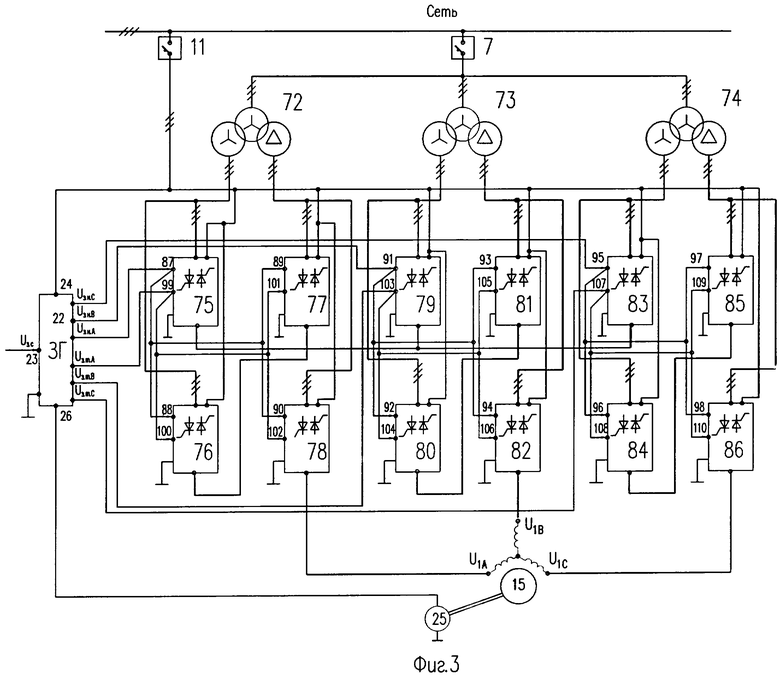
Представленный на фиг.2 трехфазный непосредственный преобразователь частоты с естественной коммутацией выполнен по трехфазной мостовой шестипульсной схеме. Для питания преобразователя частоты предусмотрен четырехобмоточный силовой разделительный трансформатор 53. Каждая фаза преобразователя частоты снабжена двумя автономно управляемыми моноблочными тиристорными преобразователями постоянного тока с трехфазной нулевой реверсивной схемой выпрямления. При этом преобразователи 54 и 55 образуют мост для фазы А; 56 и 57 - для фазы В и 58 и 59 - для фазы С, и их силовые входы подключены к соответствующим вторичным обмоткам силового трансформатора 53.
Причем преобразователи 54, 56 и 58 являются ведущими и их выходы соединены в звезду, а преобразователи 55, 57 и 59 - ведомыми и их выходы подключены к соответствующим фазам асинхронного двигателя 15. На входы 60-65 модульных преобразователей 54-59 с соответствующих выходов задающего генератора 22 поступают сигналы управления напряжением UзнА, UзнВ, UзнС, а на входы 66-71 - сигналы управления логикой раздельного управления моноблочных тиристорных преобразователей постоянного тока.
Схема работает аналогично схеме, рассмотренной в п.1, причем благодаря безналадочности и взаимозаменяемости модульных преобразователей, упрощается эксплуатация преобразователя и сокращаются простои технологического оборудования.
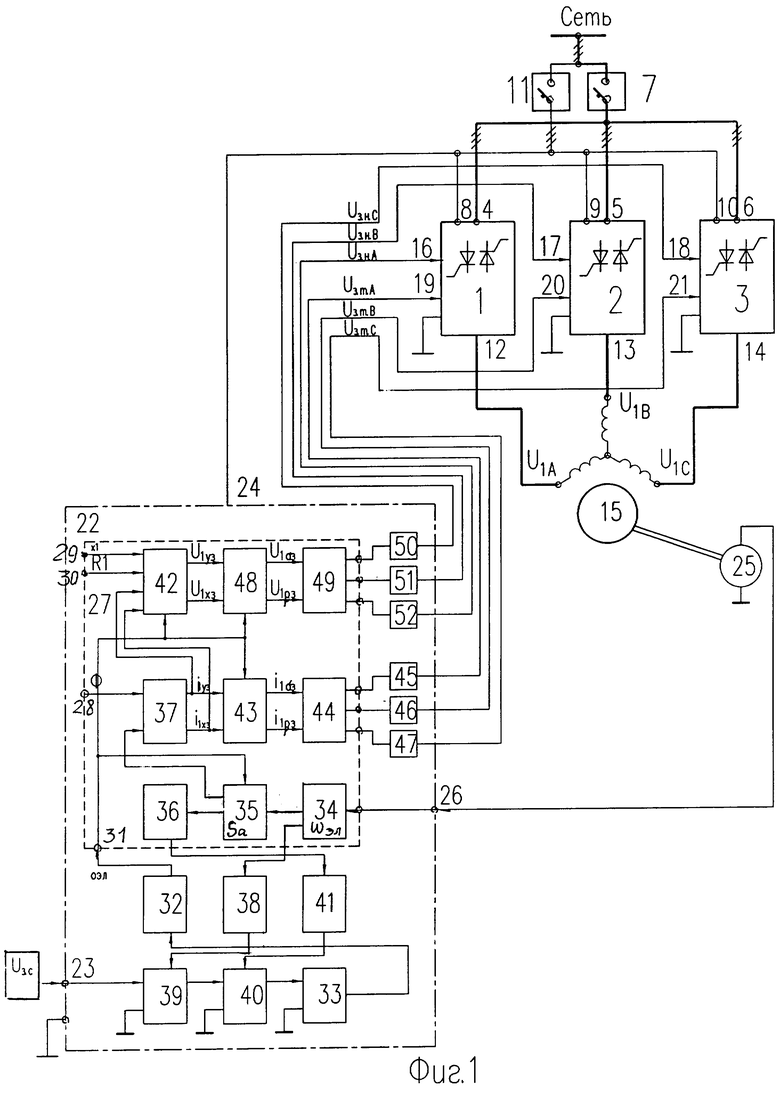
Представленный на фиг.3 трехфазный непосредственный преобразователь частоты с естественной коммутацией выполнен по трехфазной двухмостовой двенадцатипульсной схеме. Для питания каждой фазы непосредственного преобразователя частоты предусмотрены трехобмоточные силовые разделительные трансформаторы 72, 73, 74. Каждая фаза преобразователя частоты снабжена четырьмя автономно управляемыми моноблочными тиристорными преобразователями постоянного тока с трехфазной нулевой реверсивной схемой выпрямления. При этом ведущий преобразователь 75 и первый ведомый преобразователь 76 образуют первый мост фазы А и их силовые входы подключены к первой вторичной обмотке силового трансформатора 72, второй ведомый преобразователь 77 и третий ведомый преобразователь 78 - второй мост фазы А, а их силовые входы подключены ко второй вторичной обмотке силового трансформатора 72; преобразователи 79, 80 и 81, 82 - соответственно первый и второй мосты фазы В, а их входы подключены соответственно к первой и второй вторичным обмоткам силового трансформатора 73; преобразователи 83, 84 и 85, 86 - соответственно первый и второй мосты фазы С, а их входы подключены соответственно к первой и второй вторичным обмоткам силового трансформатора 74. Причем преобразователи 75, 79 и 83 являются ведущими и их выходы соединены в звезду, выходы ведомых преобразователей 76, 77 в фазе А, 80, 81 в фазе В и 84, 85 в фазе С соединены в каждой фазе между собой, а выходы ведомых преобразователей 78, 82 и 86 подключены к соответствующим фазам асинхронного двигателя 15. На входы 87-98 модульных преобразователей 75-86 с соответствующих выходов задающего генератора 22 поступают сигналы управления напряжением UзнА, UзнВ, UзнС, а на входы 99-110 - сигналы для логики раздельного управления моноблочных тиристорных преобразователей постоянного тока.
Схема работает аналогично схеме, рассмотренной в п.1. При этом благодаря безналадочности и взаимозаменяемости модульных преобразователей сокращается количество резервных преобразователей, упрощается эксплуатация преобразователя частоты и сокращаются простои технологического оборудования.
Таким образом, путем компоновки трехфазного непосредственного преобразователя частоты из моноблочных реверсивных тиристорных преобразователей постоянного тока и задающего генератора, на входы которых поступает напряжение питания и синхронизации управления от общего источника, силовые входы каждого преобразователя постоянного тока подключены к сети или к соответствующим вторичным обмоткам силовых разделительных трансформаторов, а выход каждой фазы преобразователя частоты соединен с соответствующей фазой асинхронного двигателя. Моноблочные тиристорные преобразователи постоянного тока представляют собой законченное устройство, содержат силовую часть, автономную систему управления и осуществляют регулирование напряжения и частоты токов фаз двигателя по сигналам задания напряжения и знака тока каждой фазы, поступающим с выхода задающего генератора. Задающий генератор содержит цифровое вычислительное устройство и настроенные на технический оптимум аналоговые регуляторы момента и скорости двигателя.
На входы вычислительного устройства поступают сигналы управления частотой, потоком двигателя, задание активного и реактивного сопротивлений фаз двигателя и сигнал импульсного датчика положения ротора. Вычислительное устройство по сигналам задания частоты и импульсного датчика положения вычисляет скорость двигателя, абсолютное скольжение и момент двигателя.
Использование мостовых и многомостовых НПЧ позволяет повысить пульсность напряжения преобразователя, существенно улучшить форму напряжения и тока фазы двигателя и их гармонический состав, расширить диапазон регулирования частоты, причем предлагаемое устройство непосредственного преобразователя частоты обеспечивает сохранение простоты его наладки и эксплуатации на уровне трехпульсной схемы, повышает надежность работы электроприводов в полевых условиях без постоянного квалифицированного технического обслуживания, исключает простои машин при возможных отказах электроники за счет безналадочной замены любого отказавшего моноблочного тиристорного преобразователя постоянного тока резервным, выполняемой оперативным персоналом промышленной установки.
Источники информации
1. Сарваров А.С. Энергосберегающий электропривод на основе НПЧ-АД с программным формированием напряжения: Монография. - Магнитогорск: МГТУ, 2001, с.53, рис. 2.2, с.55, рис. 2.5 и с.57, рис. 2.7.
2. Подобедов Е.Г., Кураев М.Н. Способ управления частотным асинхронным электроприводом и устройство для его осуществления. - Патент РФ №2081503, бюл. №16, 1997 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным короткозамкнутым электродвигателем (его варианты) | 1980 |
|
SU928587A1 |
| Частотно-регулируемый электропривод грузоподъемного механизма | 1985 |
|
SU1365333A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2389127C2 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| УСТРОЙСТВО ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ НА ОСНОВЕ ТРЕХФАЗНОГО ТРЕХУРОВНЕВОГО АВТОНОМНОГО ИНВЕРТОРА NPC | 2023 |
|
RU2821420C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2003 |
|
RU2251204C1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
Изобретение относится к электротехнике и предназначено для использования в электроприводах, работающих в отсутствие постоянного квалифицированного обслуживания в условиях вибраций, тряски, большой запыленности, характерных для электроприводов одноковшовых экскаваторов. Технический результат заключается в упрощении наладки и эксплуатации преобразователя частоты, в повышении надежности работы электроприводов в полевых условиях и в сокращении простоев. В трехфазном непосредственном преобразователе частоты для асинхронного электропривода трехфазный непосредственный преобразователь частоты составлен из моноблочных реверсивных тиристорных преобразователей постоянного тока и задающего генератора, на входы которых подается напряжение питания и синхронизации управления от общего источника, силовые входы каждого моноблочного тиристорного преобразователя постоянного тока подключены к сети, а выход каждой фазы упомянутого преобразователя соединен с соответствующей фазой асинхронного двигателя. Моноблочные тиристорные преобразователи постоянного тока содержат силовую часть, автономную систему управления и осуществляют регулирование напряжения и частоты токов фаз двигателя по сигналам задания напряжения и знака тока каждой фазы, поступающим с выхода задающего генератора. Задающий генератор содержит цифровое вычислительное устройство и настроенные на технический оптимум аналоговые регуляторы момента и скорости двигателя. 3 ил.
Трехфазный непосредственный преобразователь частоты с естественной коммутацией для асинхронного электропривода, содержащий силовые тиристоры и систему импульсно-фазового управления напряжением и частотой асинхронного двигателя, отличающийся тем, что в каждой фазе преобразователя силовые тиристоры выполнены в виде автономно управляемого моноблочного тиристорного преобразователя постоянного тока с трехфазной нулевой реверсивной схемой выпрямления, устройство снабжено задающим генератором, импульсным датчиком положения ротора асинхронного двигателя, двумя автоматическими выключателями, силовые входы указанного моноблочного тиристорного преобразователя постоянного тока через первый автоматический выключатель подключены к трехфазной сети, а силовые выходы подключены к соответствующей фазе асинхронного двигателя, входы синхронизации указанных моноблочных тиристорных преобразователей и задающего генератора через второй автоматический выключатель подключены к трехфазной сети, первый вход управления указанным моноблочным преобразователем данной фазы подключен к первому выходу задающего генератора, второй вход подключен ко второму выходу задающего генератора, первый и второй входы управления указанных моноблочных тиристорных преобразователей других фаз подключены к третьему, четвертому, пятому и шестому выходам задающего генератора, причем задающий генератор содержит цифровое вычислительное устройство, восемь цифроаналоговых преобразователей, один аналого-цифровой преобразователь задания скорости, интегратор, регулятор момента и регулятор скорости, один вход вычислительного устройства предназначен для задания потока двигателя, второй вход соединен с выходом аналого-цифрового преобразователя задания скорости, третий и четвертый входы предназначены для ввода значений активного и индуктивного сопротивлений фаз двигателя, пятый вход соединен с выходом импульсного датчика положения ротора, первый, второй, третий, четвертый, пятый и шестой выходы через цифроаналоговые преобразователи соединены с соответствующими выходами задающего генератора, седьмой выход через цифроаналоговый преобразователь соединен со вторым входом регулятора момента, первый вход которого соединен с выходом регулятора скорости, а выход - с входом интегратора, восьмой выход через цифроаналоговый преобразователь соединен со вторым входом регулятора скорости, первый вход которого соединен с выходом задатчика скорости, а выход интегратора соединен со входом аналого-цифрового преобразователя задания скорости.
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНЫМ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2081503C1 |
| НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1992 |
|
RU2066512C1 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ | 1998 |
|
RU2144729C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| GB 1462674 А, 26.01.1976 | |||
| US 4764712 А, 16.08.1988 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2649840C1 |
| DE 3744905 A, 15.05.1991 | |||
| Прибор для непрерывного измерения толщины масляной пленки в подшипнике скольжения | 1950 |
|
SU91589A1 |

