электрогидрораспределителями гидроцилиндров выдвижения и заглубления рабочих органов, при этом датчик для предохранения рабочего органа от поломки связан через его чувствительный элемент, блок задержки, второй одновибратор, третий релейный элемент с электрогидрораспределителями гидроцилиндров выдвижений и заглубления рабочего органа, а также через его чувствительный элемент с элементом ЗАПРЕТ и первым релейным элементом, связанные с электрогидрораспределителями гидроцилиндров заглубления и выдвижения рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для катаровки виноградных растений | 1983 |
|
SU1097233A1 |
| Устройство для катаровки виноградных растений | 1986 |
|
SU1404014A1 |
| УСТРОЙСТВО ДЛЯ КАТАРОВКИ ВИНОГРАДНЫХ КУСТОВ, ПОДСАДКИ САЖЕНЦЕВ | 2012 |
|
RU2523145C2 |
| Устройство для катаровки растений | 1985 |
|
SU1271451A1 |
| Способ автоматического вождения трактора на виноградниках и устройство для его осуществления | 1991 |
|
SU1806505A1 |
| Опора для вьющихся растений | 1982 |
|
SU1093295A1 |
| Копирующее устройство для автоматического вождения тракторного агрегата на виноградниках и в садах | 1983 |
|
SU1144638A1 |
| Устройство для отвода рабочих органов культиватора от штамбов растений | 1971 |
|
SU540583A1 |
| Способ ведения виноградного куста на шпалерных насаждениях и устройство для его осуществления | 1979 |
|
SU944180A1 |
| Устройство для обработки почвы в рядах растений | 1990 |
|
SU1792234A3 |
1. УСТРОЙСТВО ДЛЯ КАТАРОВКЙ ВИНОГРАДНЫХ РАСТЕНИЙ, содержащее снабженный датчиком со, следящей системой для предохранения от поломки рабочий орган для обработки околоштамбовой зоны с механизмом навески, связанным с рамой тракторного агрегата, отличающееся тем, что, с целью пошяшения эффективности работы устройства, рабочий орган выполнен в виде ножа с полукруглой выемкой в его средней части, а механизм навески рабочего органа снабжен направляющей с боковой прорезью и размещенной в ней подвижной опорой, гйдроцилиндрами для выдвижения и заглубления рабочего органа с электрогидррраспределителями, причем направляющая шарнирно соединена с рамой с возможностью поворота в горизонтально-поперечной плоскости, гидроцилиндр заглубления заг креплен на направляющей, его шток-шарнирно соединен с одним концом подвижной опоры, на котором также шарнирно установлен подпружиненный к направ|Ляюи4ей угловой рычаг, на конце кото- , рого выполнен паз, а гидроцияиндр вы. движения рабочего органа шарнирно связан с другим концом подвижной опоры, при этом его шток через двуплечий рычаг и шарнирно соединенную с ним тягу связан с рабочим органом, тяга посредством пальца закреплена в п.азу углового рычага, а ось поворота двуплечего рычага размещена в прорез4 направляющей и шарнирно закреп-. лена на подвижной опоре. 2. Устройство по п. 1, о т л и чающееся тем, что оно сн жено системой управления рабочим органом, содержащей по крайней мере два дополнительных датчика - для измерения положения рабочего органа и для определения начала технологического процесса, а также электронный блок управления, включающий чувствительные элементы каждого датчика, знаковую дифференцирующую цепь, триггер Шмитта, элемент ЗАПРЕТ, блок 31адержки, одновибраторы, релейные элементы каждого датчика, развязывающие диоды, причем датчик для измерения положения рабочего органа связан через его чувствительный элемент, м знаковую дифференцирующую цепь, триг э гер Шмитта, первый релейный элемент с электрогидрораспределителями д роцилиндров выдвижения и заглубления м рабочего органа, а датчик определения начала технологического процесса связан через его чувствительный элемент, элемент ЗАПРЕТ первый одновибратор, второй релейный элемент с .электрогиД рораспределитёлем гидроцилиндра заглубления рабочего органа, а также через чувствительный элемент, элемент ЗАПРЕТ, блок задержки, второй одно,вибратор, третий релейный элемент с
1
Изобретение относится к отрасли сельскохозяйственного машиностроения, в частности к устройствам для возделывания виноградников.
Известно устройство для катаровки виноградных растений, содержащее снабженный датчиком со следящей системой для предохранения от поломки рабочий орган для обработки околоштамбовой зоны с механизмом навески, связанным с рамой тракторного агрега-. та tl V
Однако почва в районе штамба обрабатывается фрезерованием, что не приводит к полному удалению почвы от околоштамбовой зоны и следовательно, возникает возможность повторного развития корней.
Цель изобретения - повышение эффективности работы устройства.
Поставленная цель достигается тем, что в устройстве для катаровки виноградных растений рабочий орган выполнен в виде ножа с полукруглой выемкой в его средней части, а механизм навески рабочего органа снабжен направляющей с боковой прорезью и размещенной в ней подвижной опорой, гидроцилиндрами для выдвижения и заглубления рабочего органа с электрогидрораспределителями, причем направляющая шарнирно соединена с рамой с возможностью поворота в горизонтально-поперечной плоскости, гидроцилиндр заглубления закреплен на направляющей, его шток шарнирно соединен с одним концом подвижной опоры, на котором также шарнирно установлен подпружиненный к направляющей угловой рычаг, на конце которого выполнен паз, а гид роцилиндр выдвижения рабочего органа шарнирно связан с другим концом подвижной опоры, при этом его шток через, двуплечий рычаг и шарнирно соединенную с ним тягу связан с рабочим органом, тяга посредством пальца закреплена в пазу углового рычага, а ось поворота двуплечего рычага размещена в прорези направляющей и шарнирно закреплена на подвижной опоре.
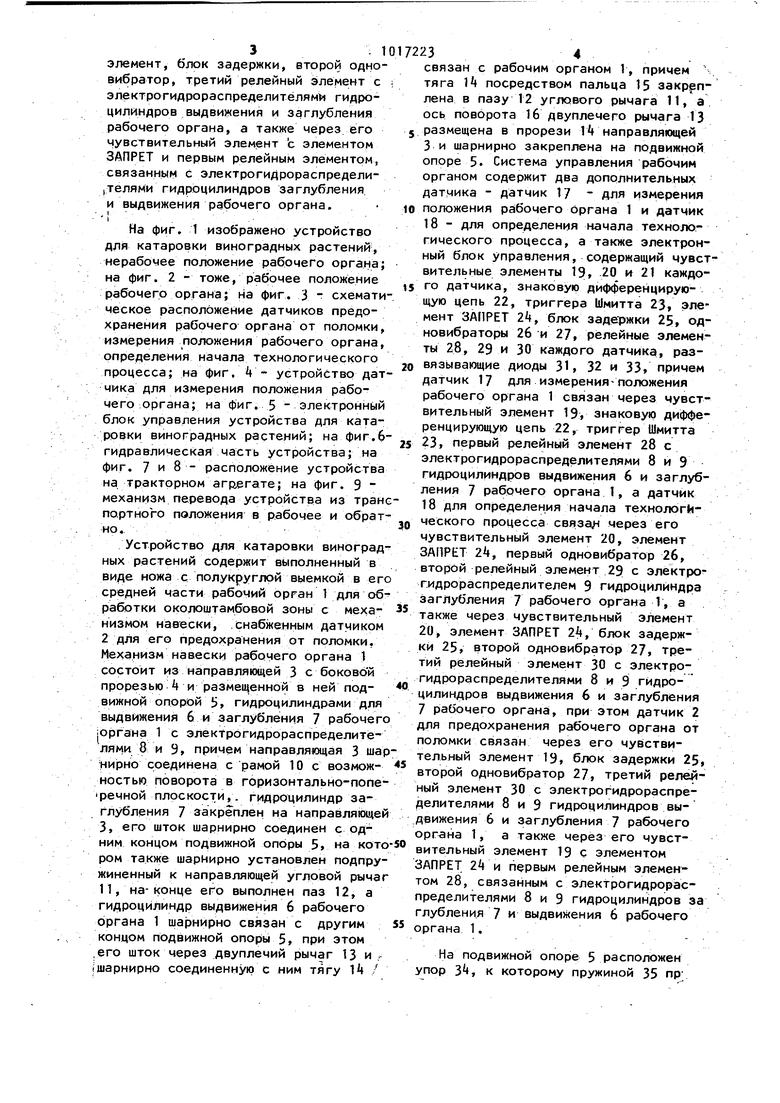
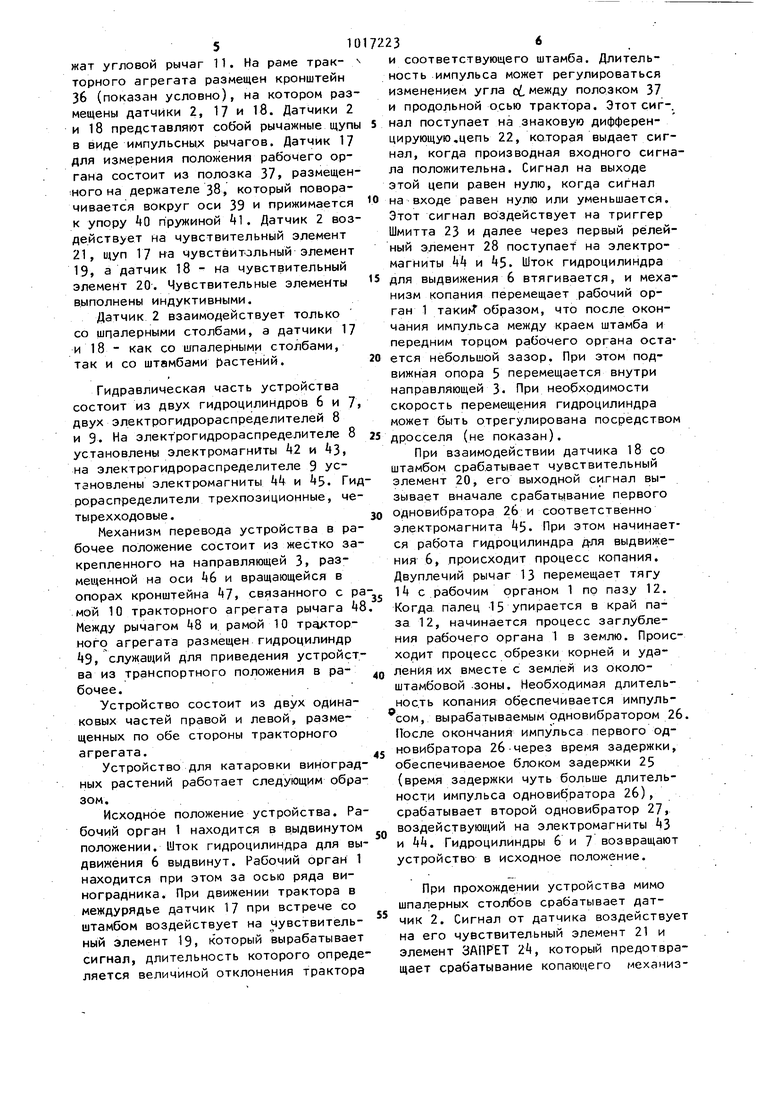
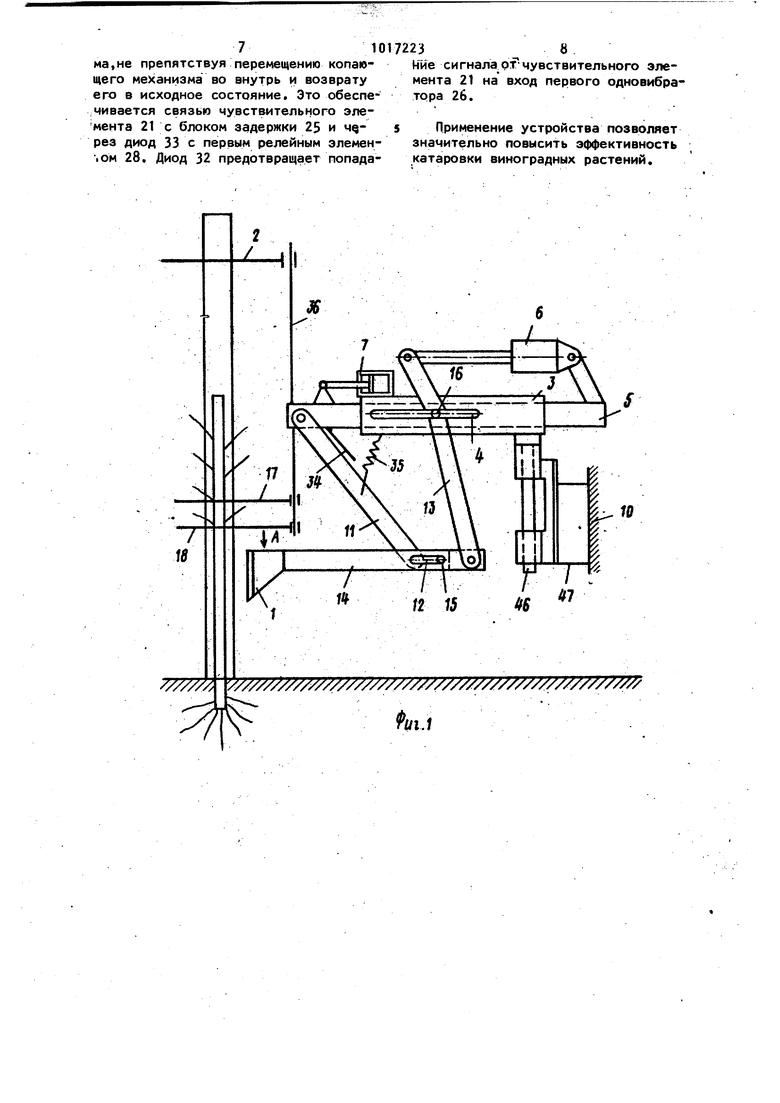
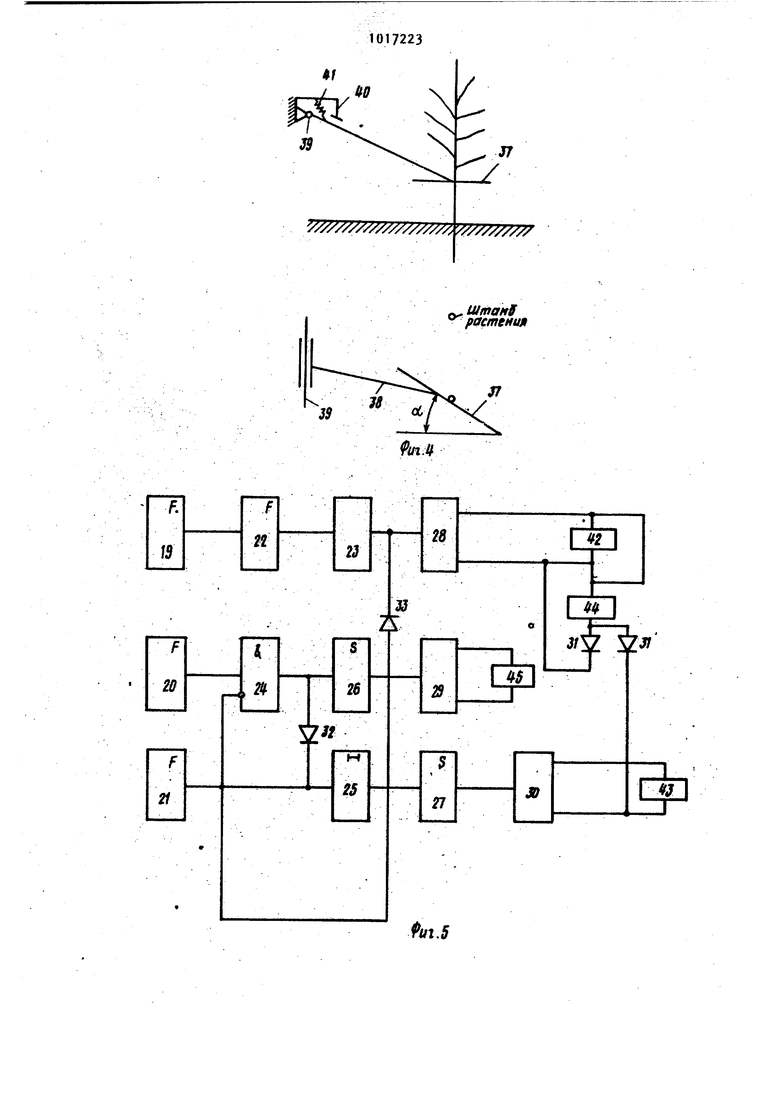
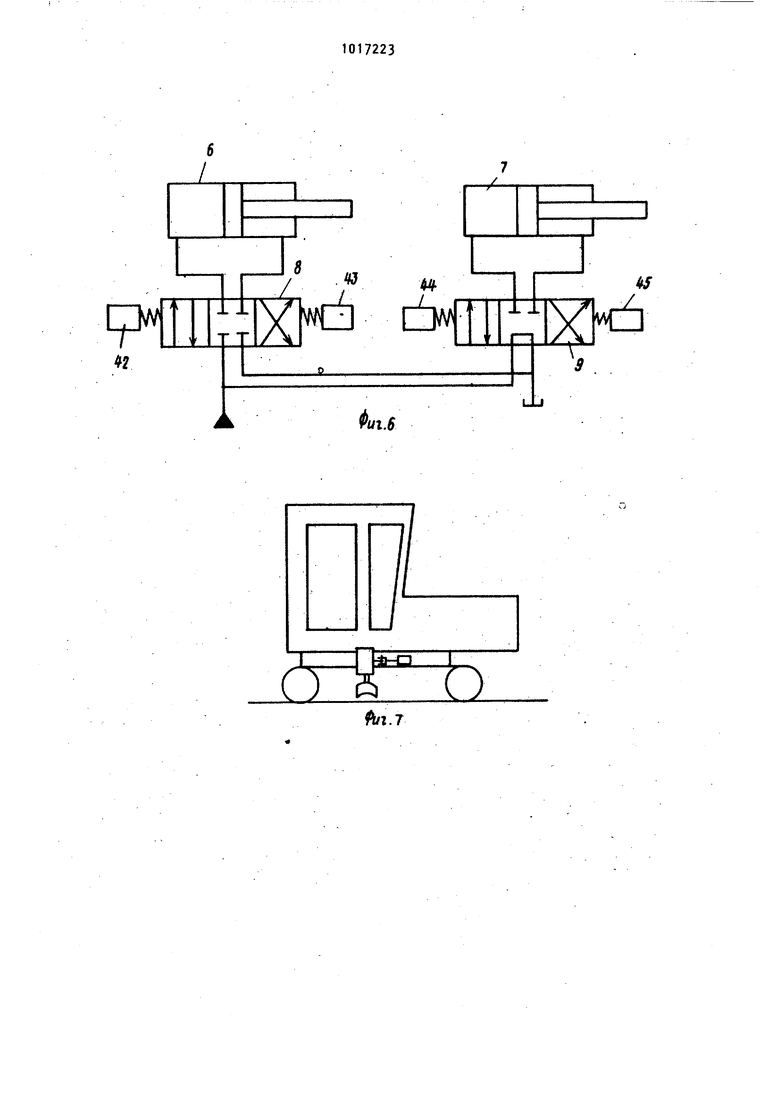
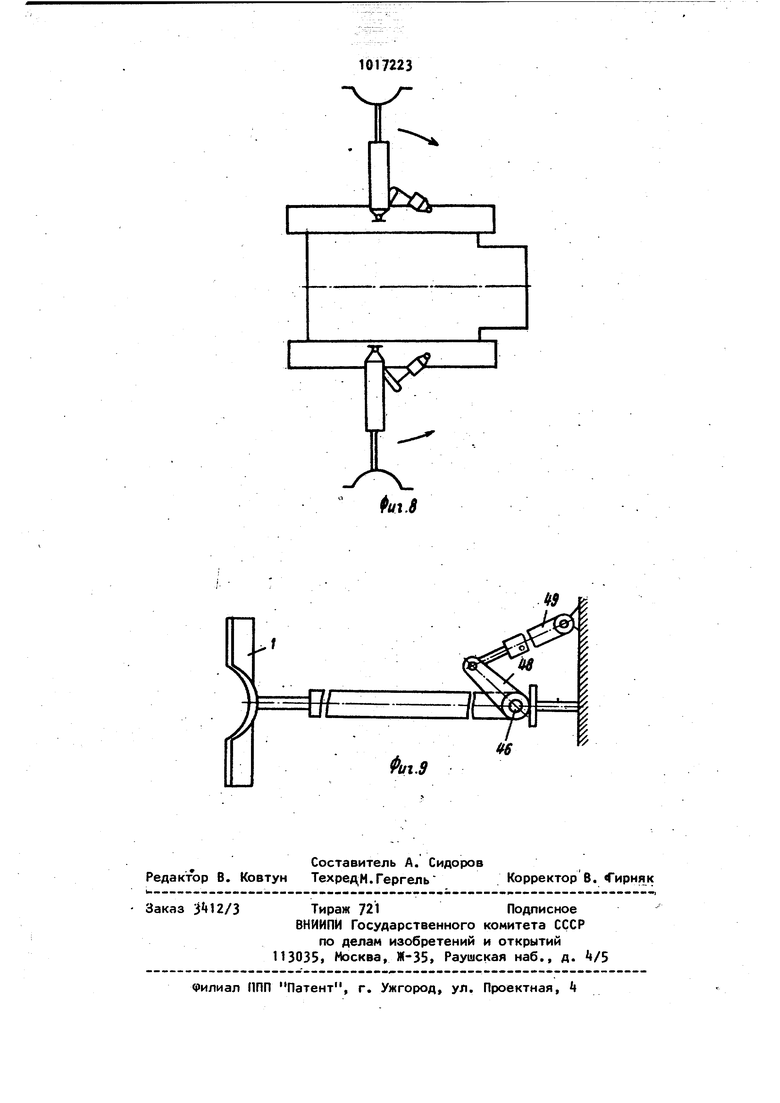
Кроме того, оно снабжено системой управления рабочим органом,содержащей два дополнительных датчика - для измерения положения рабочего органа и для определения начала технологического процесса, а также электронный блок управления, включающий чувствительные элементы каждого датчика, знаковую дифференцирующую цепь, триггер Шмитта, элемент ЗАПРЕТ, блок задержки, одновибраторы, релейные элементы каждого датчика, развязывающие диоды, причем датчик для измерения положения рабочего органа связан «-ерез его чувствительный элемент, знаковую дифференцирующую цепь, триггер Шмитта, ервый релейный элемент с электрогидг рораспределителями гидроцилиндров выдвижения и заглубления рабочего органа, а датчик определения начала технологического процесса связан через его чувствительный элемент, элемент ЗАПРЕТ, первый одновибратор, второй релейный элемент с электрогидрораспределителем гидроцилиндра заглубления рабочего органа, а также через чувствительный элемент, элемент ЗАПРЕТ, блок задержки, второй одновибратор, третий релейный элемент с электрогидрораспределителями гидроцилиндров выдвижения и заглубления рабочих органов, при этом датчик для предохранения рабочего органа от поломки связан через его чувствительный элемент, блок задержки, второй одновибратор, третий релейный элемент с электрогидрораспределитёлям гидроцилиндров выдвижения и заглубления рабочего органа, а также через его чувствительный элемент с элементом ЗАПРЕТ и первым релейным элементом, связанным с электрогидрораспредели|Телями гидроцилиндров заглубления и выдвижения рабочего органа. ,-. . На фиг. 1 изображено устройство для катаровки виноградных растений, нерабочее положение рабочего органа; на фиг. 2 - тоже, рабочее положение рабочего органа; на фиг. 3 схематическое расположение датчиков предохранения рабочего органа от поломки, измерения положения рабочего органа, определения начала технологического процесса; на фиг. k - устройство датчика для измерения положения рабочего .органа; на фиг. 5 - электронный блок управления устройства для катаровки виноградных растений; на фиг.6гидравлическая часть устройства; на фиг. 7 и 8 - расположение устройства на тракторном аг|г,егате; на фиг. 9 механизм перевода устройства из Транс портного положения в рабочее и обратно. Устройство для катаровки виноградных растений содержит выполненный в виде ножа с полукруглой выемкой в его средней части рабочий орган 1 для об работки околоштамбовой зоны с механизмом навески, .снабженным датчиком 2 для его предохранения от поломки. Механизм навески рабочего органа 1 состоит из направляющей 3 с боковой прорезью 4 и размещенной в ней подвижной опорой i), гидроцилиндрами для выдвижения 6 и заглубления 7 рабочего |Органа 1 с элекТрогидрораспределителями 8 и У, причем направляющая 3 шар нирно соединена с рамой 10 с возможностью поворота в горизонтально-поперечной плоскости,, гидроцилиндр заглубления 7 закреплен на направляющей 3, его шток шарнирно соединен с одним концом подвижной опоры 5, на кото ром также шарнирно установлен подпружиненный к направляющей угловой рычаг 11, на-конце его выполнен паз 12, а гидроцилиндр выдвижения 6 рабочего органа 1 шарнирно связан с другим концом подвижной опоры 5, при этом ,его шток через двуплечий рычаг 13 и г (шарнирно соединенную с ним тягу 1А / связан с рабочим органом 1, причем тяга I посредством пальца 15 закррплена в пазу 12 углового рычага 11, а ось поворота 16 двуплечего рычага 13 размещена в прорези 1А направляющей 3 и шарнирно закреплена на подвижной опоре 5. Система управления рабочим органом содержит два дополнительных датчика - датчик 17 для измерения положения рабочего органа 1 и датчик 18 - для определения начала технологического процесса, а также электронный блок управления, содержащий чувствительные элементы 19, 20 и 21 каждого датчика, знаковую дифференцирующую цепь 22, триггера Шмитта 23 элемент ЗАПРЕТ 2k, блок задержки 25, одновибраторы 26 и 27, релейные элементы 28, 29 и 30 каждого датчика, развязывающие диоды 31, 32 и 33 причем датчик 17 для измерения-положения рабочего органа 1 связан через чувствительный элемент 19, знаковую дифференцирующую цепь 22, триггер Шмитта 23, первый релейный элемент 28 с электрогидрораспределителями 8 и 9 гидроцилиндров выдвижения 6 и заглубления 7 рабочего органа 1, а датчик 18 для определения начала технологического процесса связав через его чувствительный элемент 20, элемент ЗАПРЕТ 2k, первый одновибратор 2б, второй релейный элемент 29 с электрогидрораспределителем 9 гидроцилйндра заглубления 7 рабочего органа 1, а также через чувствительный элемент 20, элемент ЗАПРЕТ 2, блок задержки 25, второй одновибратор 27, третий релейный элемент 30 с электрогидрораспределителями 8 и 9 гйдроцилиндроа выдвижения 6 и заглубления 7 рабочего органа, при этом датчик 2 для предохранения рабочего органа от поломки связан через его чувствительный элемент 19, блок задержки 25, р. од овибратор 27, третий релейный элемент 30с электрогидрораспределителями 8 и 9 гидроцилиндров выдвижения 6 и заглубления 7 рабочего органа 1, а также через его чувствительный элемент 19 с элементом ЗАПРЕТ 2Ц и первым релейным элементом 28, связанным с электрогидрораспределителями 8 и 9 гидроцилиндров за глубления 7 и выдвижения 6 рабочего органа 1. На подвижной опоре 5 расположен упор 3, к которому пружиной 35 пр жат угловой рычаг 11. На раме трак- л торного агрегата размещен кронштейн Зб (показан условно), на котором размещены датчики 2, 17 и 18. Датчики 2 и 18 представляют собой рычажные щупы в виде импульсны,х рычагов. Датчик 17 для измерения положения рабочего органа состоит из полозка 37, размещенного на держателе 38, который поворачивается вокруг оси 39 и прижимается к упору Цй пружиной 1. Датчик 2 воздействует на чувствительный элемент 21, щуп 17 на чувствитольный элемент 19, а датчик 18 - на чувствительный элемент 20. Чувствительные элементы выполнены индуктивными. Датчик 2 взаимодействует только со шпалерными столбами, а датчики 17 и 18 - как со шпалерными столбами, так и со штамбами растений. Гидравлическая часть устройства состоит из двух гидроцилиндров 6 и 7, двух электрогидрораспределителей 8 и 9« На электрогидрораспределителе 8 установлены электромагн1Тты 42 и 3, на электрогидрораспределителе 9 ус тановлены электромагниты kk и 5. Гид рораспределители трехпозиционные, тырехходовые. Механизм перевода устройства в рабочее положение состоит из жестко закрепленного на направляющей 3, размещенной на оси 6 и вращающейся в опорах кронштейна 7, связанного с ра мой 10 тракторного агрегата рычага 48 Между рычагом 48 и рамой 10 тракторного агрегата размещен гидроцилиндр 49, служащий для приведения устройства из транспортного положения в рабочее. Устройство состоит из двух одинаковых частей правой и левой, размещенных по обе стороны тракторного агрегата. Устройство для катаровки виноградных растений работает следующим образом. Исходное положение устройства. Рабочий орган 1 находится в вьщвинутом положении. Шток гидроцилиндра для выдвижения 6 выдвинут. Рабочий орган 1 находится при этом за осью ряда виноградника. При движении трактора в междурядье датчик 17 при встрече со штамбом воздействует на чувствительный элемент 19, который вырабатывает сигнал, длительность которого определяется величиной отклонения трактора 10 236 и соответствующего штамба. Длительность импульса может регулироваться изменением угла dмежду полозком 37 и продольной осью трактора. Этот сиг-, нал поступает на знаковую дифференцирующую,цепь 22, которая выдает сигнал, когда производная входного сигнала положительна. Сигнал на выходе этой цепи равен нулю, когда сигнал на входе равен нулю или уменьшается. Этот сигнал воздействует на триггер Шмитта 23 и далее через первый релейный элемент 28 поступает на электромагниты 44 и 45. Шток гидроцилиндра для выдвижения 6 втягивается, и механизм копания перемещает рабочий орган 1 такикГ образом, что после окончания импульса между краем штамба и передним торцом рабочего органа остается небольшой зазор. При этом подвижная опора 5 перемещается внутри направляющей 3. При необходимости скорость перемещения гидроцилиндра может быть отрегулирована посредством дросселя (не показан). При взаимодействии датчика 18 со штамбом срабатывает чувствительный элемент 20, его выходной сигнал вызывает вначале срабатывание первого одновибратора 2б и соответственно электромагнита 45. При этом начинается работа гидроцилиндра д-ля выдвижения 6, происходит процесс копания. Двуплечий рычаг 13 перемещает тягу 14 с рабочим органом 1 по пазу 12. Когда палец -15 упирается в край паза 12, начинается процесс заглубления рабочего органа 1 в землю. Происходит процесс обрезки корней и удаления их вместе с землей из околоштамбовой .зоны. Необходимая длительность копания обеспечивается импульСОМ, вырабатываемым одновибратором 26. После окончания импульса первого одновибратора 26-через время задержки, обеспечиваемое блоком задержки 25 (время задержки чуть больше длительности импульса одновибратора 2б), срабатывает второй одновибратор 27, воздействующий на электромагниты 43 и 44. Гидроцилиндры 6 и 7 возвращают устройство в исходное положение. При прохождении устройства мимо шпалерных столбов срабатывает датчик 2. Сигнал от датчика воздействует на его чувствительный элемент 21 и элемент ЗАПРЕТ 24, который предотвращает срабатывание копающего механизма,не препятствуя перемещению копающего механизма во внутрь и возврату его в исходное состояние. Это обеспе,чивается связью чувствительного э/юмента 21 с блоком задержки 25 и MQрез диод 33 с первым релейным элементом 28, Диод 32 предотвращает попадаййе сигнала.01чувствительного элемента 21 на вход первого одновибратора 26.
Применение устройства позволяет знаяительно повысить эффективность катаровки виноградных растений.
21л.
1
d
fwt.J
U/matrf растения
-у .« «
ц
Yjcb d}w
/.
f
Ц
4Г
ХК
а
о
X
Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Буквопечатающий телеграфный аппарат системы Сименса | 1915 |
|
SU1893A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
