Изобретение относится к машиностроению, а именно к испытательной технике, и может быть использовано при испытании материалов червячных передач на заедание и изнашивание.
Известен способ моделирования червячных зацеплений, заключающийся в том, что оси моделей червяка и червячного колеса устанавливают в взаимно перпендикулярных плоскостях обеспечивая контакт их активных поверхностей, и прикладывают крутящий момент к каждой модели Cl/j.
Недостаток изве.стного способа заключается в том, что он не позволяет имитировать знакопеременное качение модели червячного колеса относительно модели червяка.
Наиболее близким к изобретению по технической сущности и достигаемому положительному эффекту является способ моделирования нагруженного контакта червячного зацепления, заключающийся в том, что оси моделей червячного колеса и червяка устанавливают в взаимно перпендикулярных плоскостях, нагружают силой одну из моделей, обеспечивающей контакт их активных поверхностей, и прикладывают крутящий момент к модели червяка 2 J,
Недостаток данного способа заключается в том, что он не моделирует полностью движений, имеющих место в реальном зацеплении, так как не учитывает знакопеременность составляющих скоростей движения моделей и наличие движения качения колеса в плоскости, проходящей через ось вращения червяка.
Целью изобретения является приближение моделируемых движений к реальным.
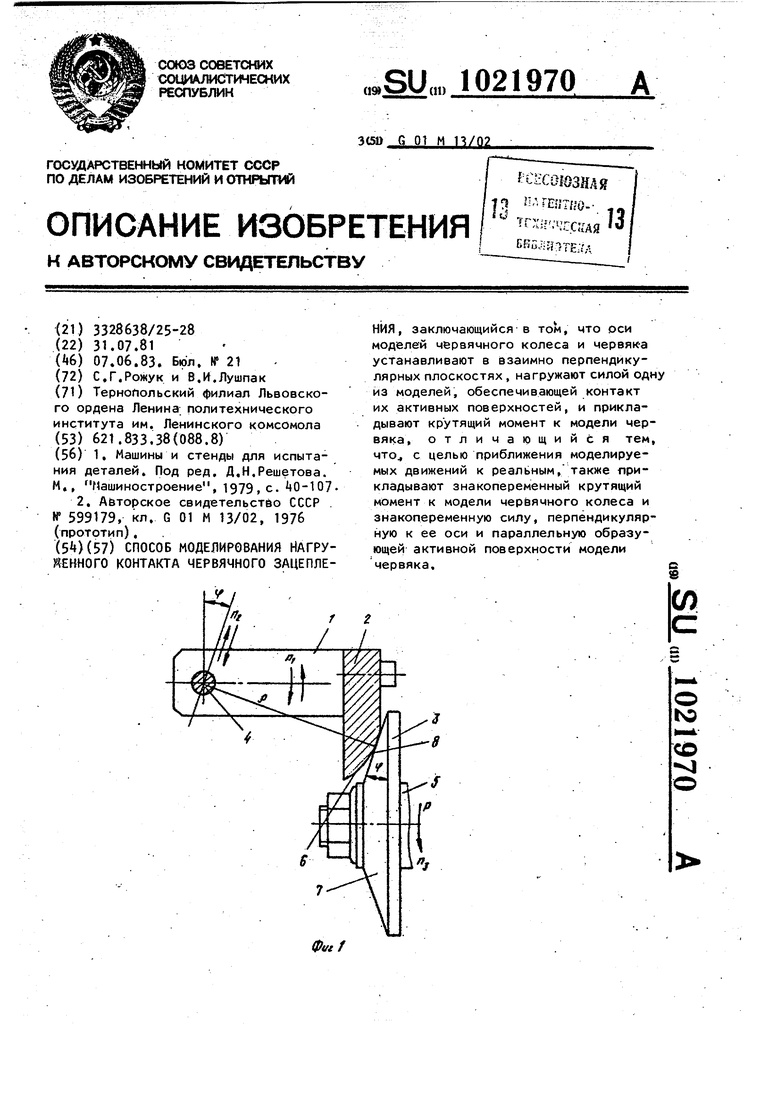
Указанная цель достигается тем, что согласно способу моделирования , нагруженного контакта червячного зацепления, заключающемуся в том, что оси моделей червячного колеса и червяка устанавливают в взаимно перпендикулярных плоскостях, нагружают силой одну из моделей, обеспечивающей контакт их активных поверхностей и прикладывают крутящий.момент к модели червяка, также прикладывают знакопеременный крутящий момент к модели червячного колеса и знакопеременную силу, перпендикулярную к ее оси и параллельную образующей активной поверхности модели червяка.
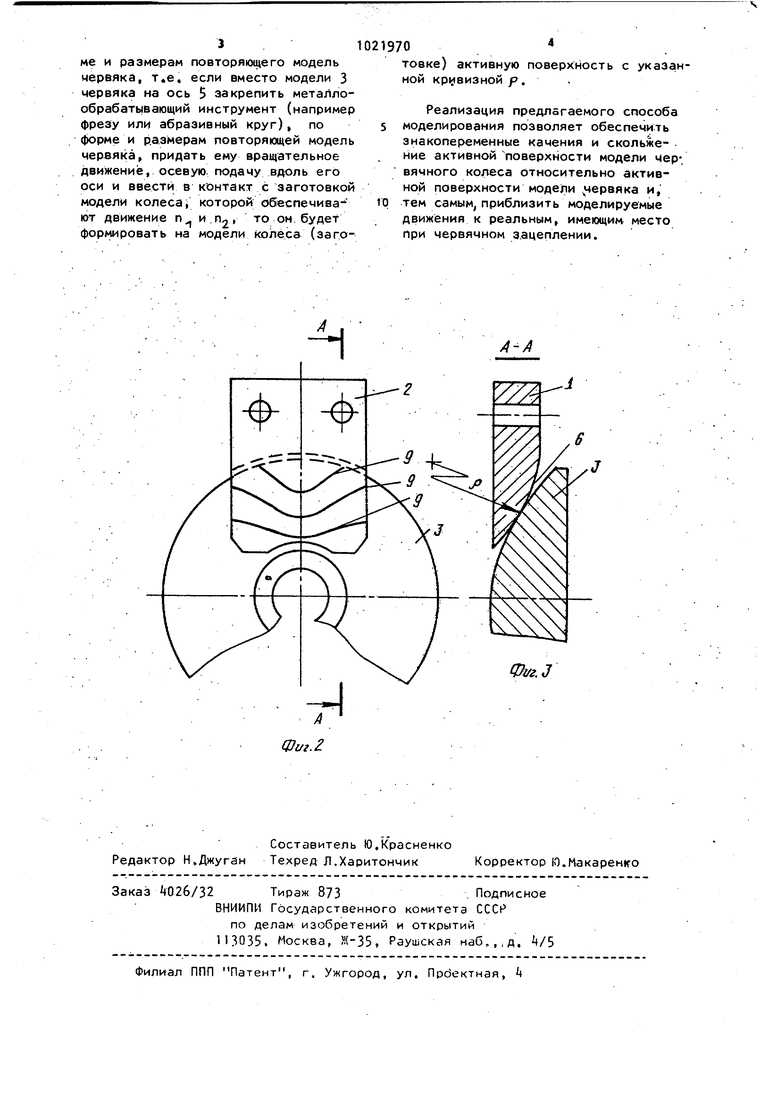
На фиг.1 изображена схема устройства, реализующего способ моделирования; на фиг. 2 - характер контактирования моделей червячного колеса и червяка; на фиг. 3 разрез А-А на фиг. 2.
Модель червячНЬго колеса, состоящая из державки 1 (фиг. 1) и закрепленного на ней рабочего элемента 2, и модель 3 червяка, выполненную, например, в виде конического ролика, устанавливают на взаимно перпендикулярных осях k и 5. Активные поверхности 6 и 7 моделей колеса и червяка соответственно, последняя из которых имеет образующую 8, контактируют по криволинейным линиям 9.
При этомось симметрии рабочего элемента 2 должна проходить через центр вращения модели червяка (4)Hr.2),
Реализуется способ следующим образом.
Нагружают силой Р, например, модель, 3 червяка, обеспечивают ее перемещение вдоль оси 5 и контакт активных поверхностей 6 и 7 соответственно рабочего элемента 2 и модели 3 червяка.
Прикладывают к модели 3 червяка крутящий момент, обеспечивающий ее вращение вокруг оси 5, знакопеременный момент к державке 1, обеспечивающий колебательное движение п последней вокруг оси , и перпендикулярную оси k и параллельную образующей 8 конической активной поверхности модели 3 червяка знакопеременную силу, обеспечивающую возвратно-поступаОСИ k ..
тельное движение П2
Частота .возвратно-поступательного движения п равна частоте колебательМодель червячного
ного движения п. колеса совершает знакопеременные качения и скольжение относительно конической поверхности модели 3 червяка.
Требуемый характер контактирования активных поверхностей моделей, контакт по криволинейной линии 9, изменение ее кривизны в процессе взаимного движения активных поверхностей 6 и 7 достигается тем, что активную поверхность 6 (фиг. 3) выполняют с переменной кривизной р путем обкатывания с скольжением модели червячного колеса вдоль образующей рабочей поверхности металлообрабатывающего инструмеитл, по форме и размерам повторяющего модель мервяка, т.е. если вместо модели 3 червяка на ось 5 закрепить металлообрабать1ваю1ций инструмент (например фрезу или абразивный круг), по форме и размерам повторяющей модель червяка, придать ему вращательное движение, осевую, подачу вдоль его оси и ввести в контакт с заготовкой модели колеса/ которой обеспечивают движение п- и П2 то он. будет формировать на модели колеса (заго0товке) активную поверхность с указанной кривизной р. Реализация предлагаемого способа моделирования позволяет обеспечить знакопеременные качения и скольжение активной поверхности модели чер-/ вячного колеса относительно активной поверхности модели червяка и, тем самым, приблизить моделируемые движения к реальным, имеющим место при червячном з.ацеплении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моделирующая испытательная машина для червячных цилиндрических зацеплений | 1976 |
|
SU599179A2 |
| Образцы для моделирования работы червячных передач | 1986 |
|
SU1441224A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОТИВОЗАДИРНОЙ СТОЙКОСТИ ЗУБЬЕВ ЭВОЛЬВЕНТНОЙ ЦИЛИНДРИЧЕСКОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ | 2007 |
|
RU2334210C1 |
| МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ | 2007 |
|
RU2416509C2 |
| Беззазорная червячная передача | 1990 |
|
SU1744335A1 |
| Моделирующая испытательная машина для червячных цилиндрических зацеплений | 1977 |
|
SU729465A1 |
| СПОСОБ ХРУСТАЛЕВА Е.Н. ПОВЫШЕНИЯ КОНТАКТНОЙ И ИЗГИБНОЙ ВЫНОСЛИВОСТИ ЭВОЛЬВЕНТНОГО ЗУБЧАТОГО ЗАЦЕПЛЕНИЯ И ЭВОЛЬВЕНТНОЕ ЗУБЧАТОЕ ЗАЦЕПЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2703094C2 |
| Устройство для полунатурного моделирования червячного привода станка | 1987 |
|
SU1522247A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВА С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2007 |
|
RU2345346C1 |
| ЧЕРВЯЧНАЯ ЦИЛИНДРИЧЕСКАЯ ПЕРЕДАЧА | 1998 |
|
RU2132983C1 |
Фиг. г
Фиг, J
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Под ред | |||
| Д.Н.Решетова | |||
| М,, Нашиностроение, 1979, с | |||
| 0-107 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аьторское свидетельстйо СССР | |||
| Моделирующая испытательная машина для червячных цилиндрических зацеплений | 1976 |
|
SU599179A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
