Изобретение относится к области локомотивостроения и предназначено для исследования динамических процессов в тяговом приводе локомотива с электропередачей.
Известно устройство для моделирования динамических процессов в тяговом приводе локомотива с электропередачей [1], содержащее тяговый электродвигатель, вал которого кинематически связан с колесной парой, опирающейся на катки, которые расположены соосно и связаны один с другим с помощью муфты скольжения, а также кинематически соединены с маховиком, имитирующим массу поезда, и нагрузочной машиной, имитирующей тяговую нагрузку.
Недостатком указанной конструкции устройства является невысокая точность моделирования динамических процессов в тяговом приводе локомотива и, в частности, процесса автоколебаний привода совместно с колесной парой. В известном устройстве это связано с отсутствием моделирования пятна контакта колеса локомотива с рельсом. В то же время явления, происходящие в пятне контакта, оказывают существенное влияние на многие динамические процессы, присущие тяговому приводу локомотива, и представляют собой основной фактор возникновения процесса автоколебаний.
В месте опирания колеса локомотива на рельс образуется пятно контакта, имеющее форму эллипса и содержащее зону скольжения и зону сцепления, причем размеры пятна контакта определяются вертикальной нагрузкой на колесо Рк и геометрией поверхностей колеса и рельса в области контакта. В большинстве случаев взаимного расположения колеса и рельса указанный эллипс вытянут вдоль последнего. Это вызвано тем, что рельс в продольном направлении представляет собой прямую линию, а в поперечном сечении его головка выполнена по радиусам, задающим требуемую кривизну в различных точках поверхности рельса. Колесо же имеет радиус в своей плоскости, а в поперечном направлении образующая колеса представляет собой коническую поверхность. В квазистационарном состоянии соотношение площадей зоны скольжения и зоны сцепления определяется соотношением величин вертикальной нагрузки на колесо Рк и касательной силы тяги Fк. Возникновение динамических режимов работы привода вызывает изменение соотношений между площадями зон скольжения и зон сцепления пятен контактов всех колес, что в конечном итоге и определяет характер автоколебаний в колесной паре и приводе.
В известном устройстве, моделирующем динамические процессы в тяговом приводе локомотива с электропередачей, колеса колесной пары имеют цилиндрическую форму и опираются на цилиндрические катки. В результате этого пятно контакта колеса и катка имеет форму эллипса, всегда вытянутого в поперечном направлении, т.е. вдоль оси колесной пары. Поэтому контактные явления в сравнении с явлениями, происходящими в пятне контакта колеса локомотива с рельсом, существенно искажены. А результаты исследований на известном устройстве динамических процессов в тяговом приводе локомотива, в частности автоколебаний привода совместно с колесной парой, имеют недопустимо большие погрешности.
Техническим результатом изобретения является повышение точности моделирования динамических процессов в тяговом приводе локомотива путем воспроизведения в устройстве пятен контакта при опирании колес колесной пары на каток подобных по своим параметрам пятнам контакта колес локомотива с рельсами.
Технический результат достигается тем, что устройство для моделирования динамических процессов в тяговом приводе локомотива с электропередачей содержит тяговый электродвигатель, вал которого кинематически связан с колесной парой, опирающейся на катки, которые расположены соосно и связаны один с другим с помощью муфты скольжения, а также кинематически соединены с маховиком, имитирующим массу поезда, и нагрузочной машиной, имитирующей тяговую нагрузку. При этом контактные поверхности колес колесной пары и катков в плоскости сечения, проходящей через оси колесной пары и катков, выполнены по радиусам, которые определяются соотношениями между радиусом моделируемой головки натурного рельса в точке контакта, радиусом моделируемого натурного колеса локомотива и радиусами колеса колесной пары и катка устройства.
Сущность изобретения поясняется чертежом.
Устройство для моделирования содержит (фиг.1) тяговый электродвигатель 1, вал которого соединен через тяговый редуктор 2 с колесной парой 3. Колесная пара 3 опирается на катки 4 и 5, связанные между собой муфтой скольжения 6. Каток 5 соединен с маховиком 7, имитирующим массу поезда, и нагрузочной машиной 8, которая имитирует тяговую нагрузку.
Тяговый электродвигатель 1 получает питание, например, от энергетической установки, в состав которой входят элементы электропередачи тепловоза переменного тока, а именно дизель-генераторная установка 9 и статический преобразователь частоты 10. Управление энергетической установкой и, следовательно, режимом работы тягового привода осуществляется дистанционно от контроллера 11. Нажимное устройство 12 позволяет имитировать осевую нагрузку локомотива, а система управления 13 обеспечивает требуемые параметры работы муфты скольжения 6.
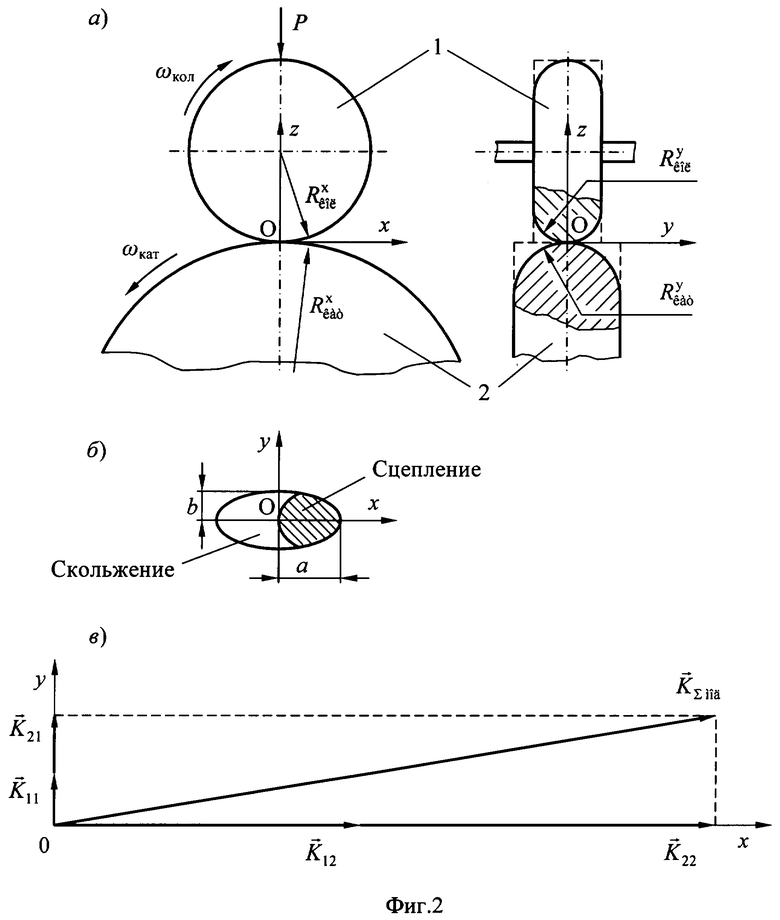
В устройстве контактные поверхности колес 1 (фиг.2, а) колесной пары и катков 2 в плоскости сечения, проходящей через оси колесной пары и катков, выполнены по радиусам соответственно Ry кол и Ry кат.
Устройство работает следующим образом.
Тяговый электродвигатель 1 (фиг.1) получает регулируемое напряжение питания от статического преобразователя частоты 10 и через тяговый редуктор 2 приводит во вращение колесную пару 3. Посредством нажимного устройства 12 колесная пара 3 с требуемым усилием опирается на катки 4 и 5. Через фрикционные контакты колес колесной пары и катков последним передается вращение, которому при включенной муфте скольжения 6 препятствуют маховик 7, имитирующий массу поезда, и нагрузочная машина 8, имитирующая тяговую нагрузку. Характерным условием работы муфты скольжения 6 так же, как и у асинхронных электродвигателей, является необходимость скольжения якоря относительно индуктора. Поэтому скорости вращения катков 4 и 5 отличаются одна от другой. Поскольку колеса колесной пары 3 жестко связаны осью, то разница в скорости вращения катков 4 и 5 приводит к проскальзыванию одного из колес. При этом передача крутящего момента осуществляется в основном через второе, непроскальзывающее колесо. Таким способом в устройстве имитируется динамический процесс автоколебаний тягового привода локомотива совместно с колесной парой.
Однако натурный тяговый привод локомотива содержит конические колеса 1 (фиг.3, а) с радиусом Rx к в своей плоскости и прямолинейные рельсы 2 с радиусами головки Ry p, определяющими ее кривизну в поперечном сечении, а в устройстве использованы колеса 1 и катки 2 (фиг.2, а) с радиусами Rx кол и Rx кат в их плоскости. Для получения подобия пятна контакта колеса устройства с катком и эллиптического пятна контакта колеса локомотива с рельсом необходимо обеспечить равенство отношений длин полуосей α/b эллипса модельного пятна контакта (фиг.2, б) и длин полуосей αнат/bнат эллипса натурного пятна (фиг.3, б). При этом эллипс модельного пятна контакта должен быть расположен в плоскости xOy подобно эллипсу натурного пятна контакта.
Известно [2, С.26-27], что длины полуосей эллиптического пятна контакта двух упругих тел можно определить по формулам

где E1 и E2 - модули упругости материалов тел 1 и 2;
E1 и E2 - модули упругости материалов тел 1 и 2;
μ1 и μ2 - коэффициенты Пуассона материалов тел 1 и 2;
m и n - коэффициенты, значения которых приведены в [2, с.27];
А и В - величины, используемые при определении размеров эллиптического пятна контакта

K11 и K12 - кривизны главных нормальных сечений тела 1 в точке контакта;
K21 и K22 - то же для тела 2; 
Для натурного контакта колеса локомотива с рельсом Е1нат=Е2нат и μ1нат=μ2нат. С целью обеспечения искомого подобия явлений, происходящих в контактах, колеса и катки рассматриваемого модельного устройства должны быть выполнены из материалов, сходных по параметрам с материалами колеса локомотива и рельса. Поэтому и для модели Е1=Е2, μ1=μ2. При этих условиях длины полуосей aнат и bнат, а также a и b зависят главным образом от величин А и В, которые определяются кривизнами главных нормальных сечений тел в точке контакта:
у колеса локомотива (фиг.3, а) 
у рельса 
у цилиндрического колеса известного устройства (фиг.2, а) 
у цилиндрического катка устройства 
Таким образом, суммарная кривизна в точке натурного контакта колеса локомотива и рельса определяется выражением (K11+К22)нат, а контакта модели колеса с катком - выражением (К11+К21)мод, т.е. в модельном контакте отсутствует кривизна в плоскости yOz, имеющая место в натурном контакте (К22). В результате этого пятно контакта цилиндрического колеса и цилиндрического катка имеет форму эллипса, всегда вытянутого в поперечном направлении, т.е. вдоль оси у. Подобие эллиптических пятен контакта колеса локомотива с рельсом и модели колеса с катком возможно только при введении в выражение для суммарной кривизны модельного контакта дополнительного члена, обуславливающего кривизну в плоскости yOz. В общем случае такими членами являются кривизны К12 модели колеса и К22 катка. Тогда суммарная кривизна контакта модели колеса с катком будет равна (K11+K12+K21+K22)мод.
Проведенные расчеты и результаты компьютерного моделирования показали, что для обеспечения подобия эллиптических пятен контакта колеса локомотива с рельсом и модели колеса с катком необходимо выдержать следующие соотношения между кривизнами натурного и модельного контактов:

Если кривизны Кij рассматривать не как скалярные величины, а как векторы, направленные перпендикулярно к своей плоскости (фиг.2, в и фиг.3, в), то суммарная кривизна модельного контакта  полученная по приведенным выше соотношениям, и суммарная кривизна натурного контакта
полученная по приведенным выше соотношениям, и суммарная кривизна натурного контакта  будут иметь одинаковое направление в плоскости хОу. Это обеспечивает положение эллипса модельного пятна контакта в плоскости хОу подобное положению эллипса пятна контакта колеса локомотива и рельса.
будут иметь одинаковое направление в плоскости хОу. Это обеспечивает положение эллипса модельного пятна контакта в плоскости хОу подобное положению эллипса пятна контакта колеса локомотива и рельса.
Таким образом, в устройстве для моделирования динамических процессов в тяговом приводе локомотива с электропередачей контактные поверхности колес колесной пары и катков в плоскости сечения yOz, проходящей через оси колесной пары и катков, выполнены по радиусам соответственно

которые определяются соотношениями между радиусом моделируемой головки натурного рельса в точке контакта Ry p, радиусом моделируемого натурного колеса локомотива Rx к и радиусами колеса колесной пары Rx кол и катка Rx кат устройства.
Технико-экономическая эффективность изобретения в сравнении с прототипом заключается в том, что в устройстве для моделирования динамических процессов в тяговом приводе локомотива с электропередачей воспроизведены пятна контакта при опирании колес колесной пары на каток, подобные по своим параметрам пятнам контакта колес локомотива с рельсами. Это позволяет повысить точность моделирования динамических процессов в тяговом приводе локомотива и, в частности, процесса автоколебаний привода совместно с колесной парой.
Источники информации
1. Авторское свидетельство СССР №771496. Устройство для моделирования динамических процессов в тяговом приводе локомотива с электропередачей/ В.И.Воробьев, С.В.Никитин (прототип).
2. Сакало В.И., Коссов В.C. Контактные задачи железнодорожного транспорта. - М.: Машиностроение, 2004. - 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамических процессов в тяговом приводе локомотива с электропередачей | 1979 |
|
SU771496A1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВА С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2012 |
|
RU2496100C1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВОВ С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2013 |
|
RU2550105C1 |
| Стенд для моделирования динамическихпРОцЕССОВ B ТягОВОМ пРиВОдЕ лОКОМОТиВАС элЕКТРОпЕРЕдАчЕй | 1979 |
|
SU823946A1 |
| СПОСОБ ИСПЫТАНИЙ УЗЛОВ ТРЕНИЯ | 2006 |
|
RU2343450C2 |
| Стенд для моделирования динамических процессов в тяговом приводе локомотива с электропередачей | 1978 |
|
SU712726A1 |
| СТЕНД ИСПЫТАНИЙ КОЛЕСНЫХ ПАР И ИХ ЭЛЕМЕНТОВ | 2010 |
|
RU2436061C1 |
| Стенд для моделирования динамических процессов в тяговом приводе локомотива | 1981 |
|
SU1000823A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР И ПОДАВЛЕНИЯ ФРИКЦИОННЫХ АВТОКОЛЕБАНИЙ В КИНЕМАТИЧЕСКОЙ ЦЕПИ ПОДВИЖНОГО СОСТАВА С АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 2004 |
|
RU2270766C2 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ФРИКЦИОННЫХ СИСТЕМ | 2016 |
|
RU2674899C1 |

Изобретение относится к области железнодорожного транспорта и предназначено для исследования динамических процессов в тяговом приводе локомотива с электропередачей. Устройство для моделирования указанных динамических процессов содержит тяговый электродвигатель, вал которого кинематически связан с колесной парой, опирающейся на катки. Катки расположены соосно и связаны один с другим с помощью муфты скольжения, а также кинематически соединены с маховиком, имитирующим массу поезда, и нагрузочной машиной, имитирующей тяговую нагрузку. При этом контактные поверхности колес колесной пары и катков в плоскости сечения, проходящей через оси колесной пары и катков, выполнены по радиусам соответственно  и
и  которые определяются соотношениями
которые определяются соотношениями  - радиус моделируемой головки натурного рельса в точке контакта,
- радиус моделируемой головки натурного рельса в точке контакта,  - радиус моделируемого натурного колеса локомотива,
- радиус моделируемого натурного колеса локомотива,  и
и  - радиусы колеса колесной пары и катка устройства.
- радиусы колеса колесной пары и катка устройства.
Технический результат заключается в повышении точности моделирования динамических процессов в тяговом приводе локомотива и, в частности, процесса автоколебаний привода совместно с колесной парой. 3 ил.
Устройство для моделирования динамических процессов в тяговом приводе локомотива с электропередачей, содержащее тяговый электродвигатель, вал которого кинематически связан с колесной парой, опирающейся на катки, которые расположены соосно и связаны один с другим с помощью муфты скольжения, а также кинематически соединены с маховиком, имитирующим массу поезда, и нагрузочной машиной, имитирующей тяговую нагрузку, отличающееся тем, что контактные поверхности колес колесной пары и катков в плоскости сечения, проходящей через оси колесной пары и катков, выполнены по радиусам соответственно Rу кол, и Rу кат, которые определяются соотношениями  - радиус моделируемой головки натурного рельса в точке контакта, Rх к - радиус моделируемого натурного колеса локомотива, Rх кол и Rх кат - радиусы колеса колесной пары и катка устройства.
- радиус моделируемой головки натурного рельса в точке контакта, Rх к - радиус моделируемого натурного колеса локомотива, Rх кол и Rх кат - радиусы колеса колесной пары и катка устройства.
| Устройство для моделирования динамических процессов в тяговом приводе локомотива с электропередачей | 1979 |
|
SU771496A1 |
| Стенд для моделирования динамических процессов в тяговом приводе локомотива | 1981 |
|
SU1000823A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ВЗАИМОДЕЙСТВИЯ КОЛЕСА С РЕЛЬСОМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА (ВАРИАНТЫ) | 1997 |
|
RU2115908C1 |
| DE 4218929, 09.09.1993. | |||

