Изобретение относится к электрическим двигателям вращения и может быть использовано в устройствах авт матики и в лентопротяжныхмеханизмах , Известен пьезоэлектрический двигатель l , содержащий два соосно расположенных цилиндрических пьезоэлемента, фрикционно взаимодействую щих между собой по цилиндрическим поверхностям, один из которых является статором, а другой - ротором. Для создания вращения в пьезоэле ментах возбуждают взаимно перпендикулярные колебания, поэтому колебания одного из них перпендикулярны поверхности другого и проходят из одного тела в другое, почти без отр жения (при примерно одинаковом волнов coпpotивлeнии материалов). Это прив дит к потере акустической энергии одного из пьезоэлементов и как след|ствие к снижению КПД. Другим недос. татком является низкая скорость вращения, задаваемая диаметрами цилиндрических поверхностей, взаимодействующих между собой. Известен также пьезоэлектрический двигатель, содержащий корпус, .цилиндрический ротор и охватывающий его пъезоэлемент, . выполненный в виде кольца, на внутренней цилиндрической поверхности которого закреплены пластины, выполнённьге с упором в цилиндрическую поверхность ротора 2 . Недостатком известного пьезоэлект рического двигателя являются,низкие КЦЦ и скорость вращения. Целью изобретения является увеличение скорости вращения и КПД, а так же расширение функциональных возможностей пьезоэлектрического двигателя. Поставленная цель достигается тем что пьезоэлектрический двигатель, содержащий цилиндрический ротор и охватывающий его пьезоэлемент, выпол ненный в виде кольца, на внутренней цилиндрической поверхности которого закреплены пластины, выполненные с упором в цилиндрическую поверхность ротора, снабжен кольцом, закрепленным на корпусе и охватывающим пьезоэлемент . На внешней цилиндрической поверхности пьезоэлемента закреплены пластины, выполненные с упором во внутреннюю цилиндрическую поверхност кольца. На пьезоэлементе закреплен второй вал, расположенный соосно пьездэлементу. На чертеже показан предложенный двигатель. Пьезоэлектрический элемент 1 выполнен в виде полого цилиндра - кольца. Целесообразно pro толщину выбирать меньше ширины кольца, что позволяет расположить на его плоскостях электроды 2 (второй электрод аналогичен первому и на черт, не показан). Пьезоэлемент 1 вьшолнен из пьезокерамического материала, например ЦТС-19, и поляризован по толщине. Подключается он к источнику питания (на черт, не показан) через скользящие контакты 3. На внешней цилиндрической поверхности пьезоэлемента 1, например под углом 90 к ней закреплены тонкие пластины 4 из упругого материала, например стали. Крепление, их осуществлено перпендикулярно плоскостям пьезоэлемента. Такие же пластины 5 аналогично закреплены на внутренней поверхности пьезоэлемента 1. Пьезоэлемент 1 с пластинами 4 и 5 образует осциллятор продольных колебаний. Пьезоэлемент 1 охватывает кольцо 6, выполненное из твердого сплава, а внутри пьезоэлемента 1 расположен ротор 7, выполненный также из твердого сплава. Кольцо 6 закреплено на корпусе (показан штриховкой). На корпусе двигателя закреплен также упорный подшипник 8, в котором установлен вал 9 с закрепленным на нем ротором 7. На валу 9 установлен с возможностью вращения второй вал 10, который через стержни 11 закреплен на пьезоэлементе 1. Таким образом, все подвижные элементы зафиксированы в осевом направлении за счет упорного подшипника 8. Выступающая часть пластины 4 и 5 больше ширины .зазора между кольцом 6, пьезоэлементом 1 и ротором 7, Поэтому при сборке пластины 4 и 5 изгибаются и устанавливаются наклонно с напряжением относительно цилиндрических поверхностей, в которые они упираются. При подключении источника питания, например, с частотой, равной или близкой к частоте продольного резонанса по ширине кольца пьезоэлемента, к токосъемникам 3 и через них к э.тек--родам 2 в пьёзоэлементе 1 возбуждаются продольные колебания, которые ответвляются в пластины 4 и 5. Продольные колебания этих пластин вызывают силы отталкивания их от цилиндрических поверхностей кольца 6 и ротора 7.,Эти силы направлены под углом, под которым пластины упираются в цилиндрически поверхности. Их тангенциальные составляющие создают моменты вращения осциллятору и, следовательно, пьезоэлементу 1 и ротору 10 пьезоэлемента 1 момент вращения передается стойкам 11 к ротору 10 . От ротора -7 момент вращения передяется валу 9 , который вращается в подшипнике 8 .
При установке пьезоэлемента возможны два основных варианта. Пластины 4 и 5 наклонены к цилиндрическим поверхностям так, как показано на чертеже. В этом случае роторы 10 и 7 вращаютсяв одном направлении. При этом скорость ротора 7 равна сумме угловых скоростей пьезоэлемента 1 относительно кольца 6 и ротора 7 относительно пьезоэлемента 1. Таким
образом, в предложенном вибродвигателе увеличена скорость вращения.
Если изменить угол наклона, например, пластин 5, на противоположный, то в этом случае роторы 10 и 7 будут вращаться в противоположных направлениях. При сборке это осуществляется путем вкручивания пьезоэлемента 1 между кольцом 6 и зажатым ротором 7.
В обоих случаях наблюдается уве-. личение КПД, так как съем акустической энергии происходит как с внешней так и с внутренней поверхностей пьезоэлемента , что увеличивает согласование осциллятора (пьезоэлемента 1) с нагрузкой.
Предложённьй пьезоэлектрический двигатель обладает повышенным КПД, что позволяет снизить температурный режим работы пьезоэлемента, что, в свою очередь позволяет перейти на широко распространенный дешевый пьезоматериал ТБК-3.
Наличие двух роторов, вращающихся с различными скоростями, расширяет функциональные возможности устройства, позволяет исключить редукторы, приводя|ще к снижению КПД и увеличению уровня шумов.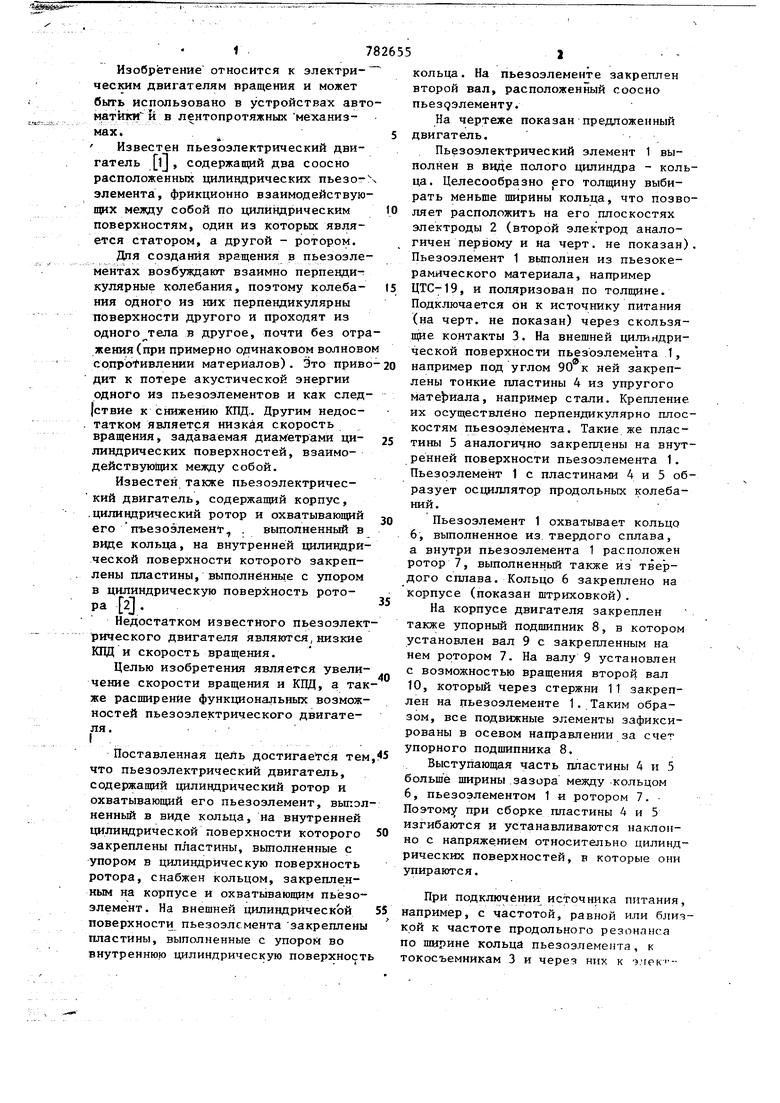
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический двигатель | 1979 |
|
SU1070628A1 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1023455A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1807548A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ РЕВЕРСИВНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2368061C1 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1128292A1 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1023457A1 |
1. ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ, содержащий корпус, цилиндрический ротор и охватывающий его пьезбэлемент, выполненный в виде кольца, на внутренней цилиндрической поверхйости которого закреплены пластины, выполненные t упором в цилиндрическую поверхности ротора, отличающийся тем, что, с целью увеличения скорости вращения и КПД,он снабжен кольцом, закрепленным на корпусе и охватывающим пье оэлемент, на внешней цилиндрической поверхности пьез.оэлемента закреплены пластины, выполненные с упором во внутреннюю цилиндрическую поверхность кольца. 2. .Пьезоэлектрический двигатель ПОП.1, отличающийся тем, что, с целью расширения функциональ ых. возможностей, на пьезоэлементе закреплен второй вал, расположенный Ш соосно пьезоэлементу.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пьезоэлектрический двигатель | 1976 |
|
SU573828A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3211931, кл | |||
| Приспособление для съемки жилетно-карманным фотографическим аппаратом со штатива | 1921 |
|
SU310A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| / | |||
