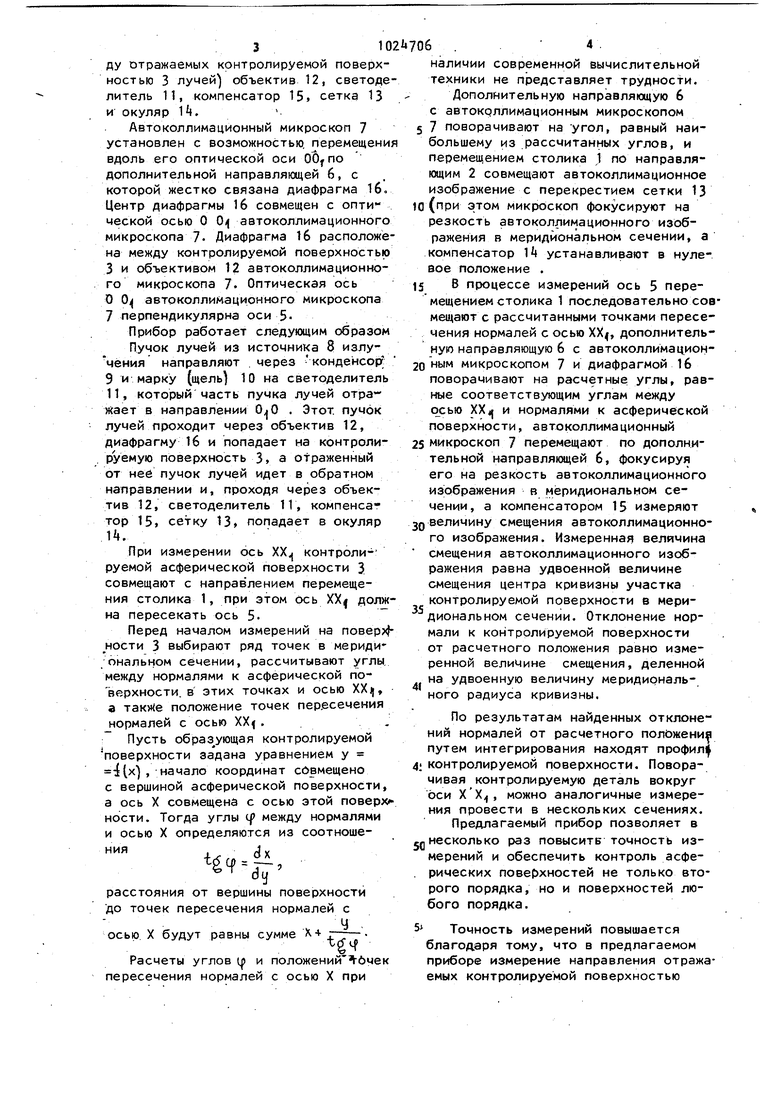
Изобретение относится к измерительной технике и может быть использовано в оптико-механическом производстве для технологического и аттестационного контроля формы асферических поверхностей. Известен прибор для контроля формы асферических поверхностей, содержащий датчик линейных перемещений с механическим щупом, установленный с возможностью поворота вокруг оси, перпендикулярной оси контролируемой поверхности, и снабженный устройством измерения углов поворота 1 . Этот прибор предназначен для конт роля шлифованных поверхностей, приме нение его для контроля полированных поверхностей нецелесообразно из-за возможности повреждения контролируемой поверхности при контакте с меха ничёским щупом и 1 недостаточной точности измерений. Наиболее близким к изобретению по технической сущности является при бор для контроля.формы асферических поверхностей, содержащий проекционную систему, выполненную с возможностью поворота вокруг оси, перпенди кулярной к оптической.оси системы, и оптическую систему измерения направления отражаемых контролируемой поверхностью лучей 2 . Недостатки известного прибора заключаются в низкой точности контроля и невозможности контроля поверхнос.тей, заданных уравнениями любой степени. Цель -изобретения - повышение точности контроля и обеспечение контроля пове0хностей, заданных уравнениями любой cteпeни. Поставленная цель достигается тем, что прибор для контроля формы асферических поверхностей, содержащи проекционную систему, выполненную с возможностью поворота вокруг оси, перпендикулярной к оптической оси системы, и оптическую систему измере ния направления отражаемых контролируемой поверхностью лучей, снабжен столиком с направляющими для прямолинейного перемещения вдоль оптической оси контролируемой поверхности и с устройством отсчета величина перемещения, диафрагмой и жестко связанной с ней дополнительной направляющей. Проекционная и оптическа системы выполнены в виде автоколлимационного микроскопа, установленного с возможностью перемещения по дополнительной направляющей и с возможностью поворота вокруг оси, установленной на столике, а диафрагма расположена перед объективом автоколлимационного микроскопа. На фиг. 1 изображена принципиальная схема прибора для контроля формы вогнутых асферических поверхностей на фиг. 2 - схема прибора для контроля выпуклых асферических поверхностей. Прибор содержит столик 1, снабженный направляющими 2 для прямолинейного перемещения вдоль оптической оси XX,, контролируемой асферич.еской поверхности 3 и устройством k ртсче та величины перемещения, выполненным в виде микрометренного винта. Для гговышения точности отсчета поворот микрометренного винта может осуществляться через червячную пере;дачу.. Возможно использование в качестве отсчетного устройства других известных устройств, обеспечивающих достаточную точность. Со столиком 1 жестко соединена ось 5. перпендикулярная направлению перемещения столика I. На оси 5 установлена с. возможностью поворота дополнительная направляющая 6, снабженная устройством для отсчета, угла поворота, например лимбом с измерительным иикроскопом (не показано). Проекционная система и оптическая система измерения направления отражаемых контролируемой поверхностью лучей выполнены в видеавтоколлимационного микроскопа 7, который состоит из источника 8 излучения, конден сатора 9 марки 10, выполненной например, в виде щели, светоделите/тя , 11, объектива 12,сетки 13, окуляра 14 и компенсатора 15 для измерения смещений авто олимационного изображения марки 10. Компенсатор 15 может быть выполнен, например, в виде линзы, перемещаемой Перпендикулярно оптической оси микрометренным винтом. Функцию проекционной системы выполняют следующие детали автоколлимационного микроскопа 7: источник 8 излучения, конденсатор 9 марка 10, светоделитель 11 и объектив 12. Функцию оптической системы измерения направления отражаемых контролируемо поверхностью лучей выполняют (по хаду отражаемых контролируемой поверхностью 3 лучей) объектив 12, светоделитель 11, компенсатор 15 сетка 13 и окуляр Т.
Автоколлимационный микроскоп 7 установлен с возможностью, перемещени вдоль его оптической оси дополнительной направляющей 6, с которой жестко связана диафрагма 1б Центр диафрагмы 16 совмещен с оптической осью О автоколлимационного микроскопа 7. Диафрагма 16 расположёна между контролируемой поверхностью 3 и объективом 12 автоколлимационного микроскопа 7. Оптическая ось О Oi аВТОколлимационного микроскопа 7 перпендикулярна оси 5Прибор работает следующим образом
Пучок лучей из источника 8 излучения направляют через конденсор 9 и марку (щель) 10 на светоделитель 11, который часть пучка лучей отражает в направлении . Этот пучок лучей проходит через объектив 12, диафрагму 16 и попадает на контролируемую поверхность 3 а otpaжeнный от нее пучок лучей идет в обратном направлении и, проходя через объектив 12, светоделитель 11, компенсатор 15, сетку 13 попадает в окуляр 14.
При измерении ось ХХ контролируемой асферической поверхности 3 совмещают с направлением перемещения столика 1, при этом ось ) должна пересекать ось 5.
Перед началом измерений на поверг ности 3 выбирают ряд точек в мериди ональном сечении, рассчитывают углы, между нормалями к асферической поверхности. в этих точках и осью XXi|, а так)«е положение точек пересечения нормалей с осью ХХ{ ..
Пусть образ ующая контролируемой поверхности задана уравнением у i(x}. начало координат совмещено с вершиной асферической поверхности, а ось X совмещена с осью этой поверх ности. Тогда углы (f между нормалями и осью X определяются из соотношеigc,J,
расстояния от вершины поверхности до точек пересечения нормалей с
осью X будут равны сумме Х.4 ---.
tg
Расчеты углов Ц) и положений бчек пересечения нормалей с осью X при
наличии современной вычислительной техники не представляет трудности.
Дополнительную направляющую 6 с автокрллимационным микроскопом
5 7 поворачивают на угол, равный наибольшему из рассчитанных углов, и перемещением столика 1 по направляющим 2 совмещают автоколлимационное изображение с перекрестием сетки 13
0(при этом микроскоп фокусируют на резкость автоколлимационного изображения в меридиональном сечении, а компенсатор 1 устанавливают в нулевое положение .
15 В процессе измерений ось 5 перемещением столика 1 последовательно совмещают с рассчитанными точками пересечения нормалей с осью ХХ, дополнительную направляющую 6 с автоколлимац ион20 ным микроскопом 7 и диафрагмой 16 поворачивают на расчетные УГЛЫ, равные соответствующим углам между осью XXjj и нормалями к асферической поверхности, автоколлимационный
25 микроскоп 7 перемещают по дополнительной направлящей 6, фокусируя его на резкость автоколлимационного изображения в меридиональном сечении, а компенсатором 15 измеряют
30 величину смещения автоколлимационного изображения. Измеренная величина смещения автоколлимационного изображения равна удвоенной величине смещения центра кривизны участка контролируемой поверхности в мери35диональном сечении. Отклонение нормали к контролируемой поверхности от расчетного положения равно измеренной величине смещения, деленной на удвоенную величину меридиональ41
ного радиуса кривизны.
По результатам найденных отклонений нормалей от расчетного положения путем интегрирования находят профил1 4i контролируемой поверхности. Поворачивая контролируемую деталь вокруг оси XX;,, можно аналогичные измерения провести в нескольких сечениях. Предлагаемый прибор позволяет в
и, несколько раз ПОВЫСИТЕ точность измерений и обеспечить контроль асфе. рических поверхностей не только второго порядка, но и поверхностей любого порядка.
5 Точность измерений повышается благодаря тому, что в предлагаемом приборе измерение направления отражаемых контролируемой поверхностью
лучей осуществляется по смещению изображений в плоскостях, проходящих через сагиттальные центры кривизны отдельных участков контролируемых поверхностей, как второго, так и высших порядков. Точность измерений при этом возрастает, так как смещение изображения в плоскости проходящей через центр кривизны, вдвое больше смещений в фокальной плос ости, находящейся в два раза Лиже к вершине измеряемой поверхности, чем центр кривизны.
Кроме/того, точность измерений с помощью предлагаемого прибора
повышается благодаря тому, что в нем объектив системы измерения направления отраженных контролируемой поверх ностью лучей постоянно работает одним и тем же (центральным) участком своего входного зрачка.
Предлагаемый прибор позволяет контролировать поверхности вращения .
любого .порядка и причем без какихлибо компенсаторов и эталонных по-п верхностей, что позволит существенно снизить затраты на подготовг ку производства асферических де-
талей.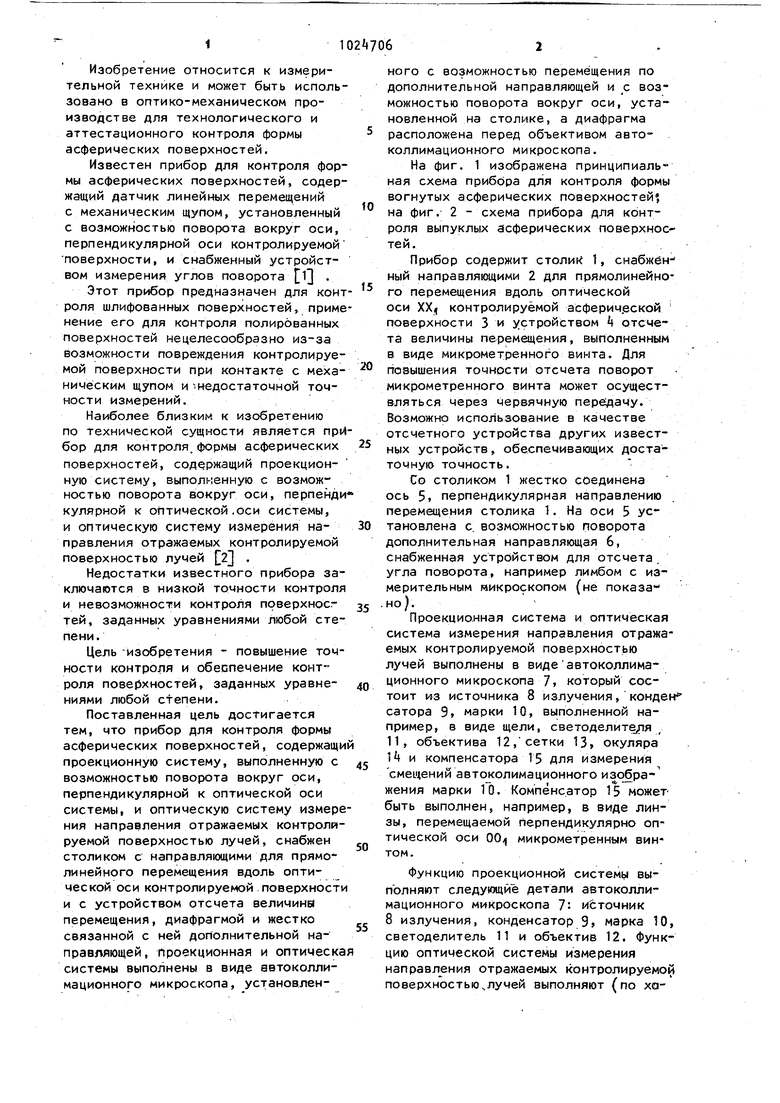

| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для контроля углов призм | 1977 |
|
SU693109A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| ГОЛОГРАФИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ АСФЕРИЧЕСКИХ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2022 |
|
RU2786688C1 |
| Интерферометр для контроля формы оптических поверхностей | 1980 |
|
SU996857A1 |
| АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2019 |
|
RU2705177C1 |
| Интерферометр для контроля асферических поверхностей второго порядка | 1988 |
|
SU1627829A1 |
| Устройство для бесконтактного контроля крупногабаритных астрономических асферических зеркал | 1973 |
|
SU729440A1 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| Устройство для бесконтактного измерения мередиональный профиля полированных поверхностей | 1990 |
|
SU1788432A1 |
| ЛАЗЕРНЫЙ АВТОКОЛЛИМАЦИОННЫЙ МИКРОСКОП | 2015 |
|
RU2630196C2 |

/ 2
.
Фив г
//
ff
ГУ
1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Духопел И.И; и др | |||
| Методы | |||
| крнтрюля формы асфери.ческих гговерх | |||
| ностё й вращения.-ОМП, 1975, N 7, .,-с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Там же,-рис | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
