1C
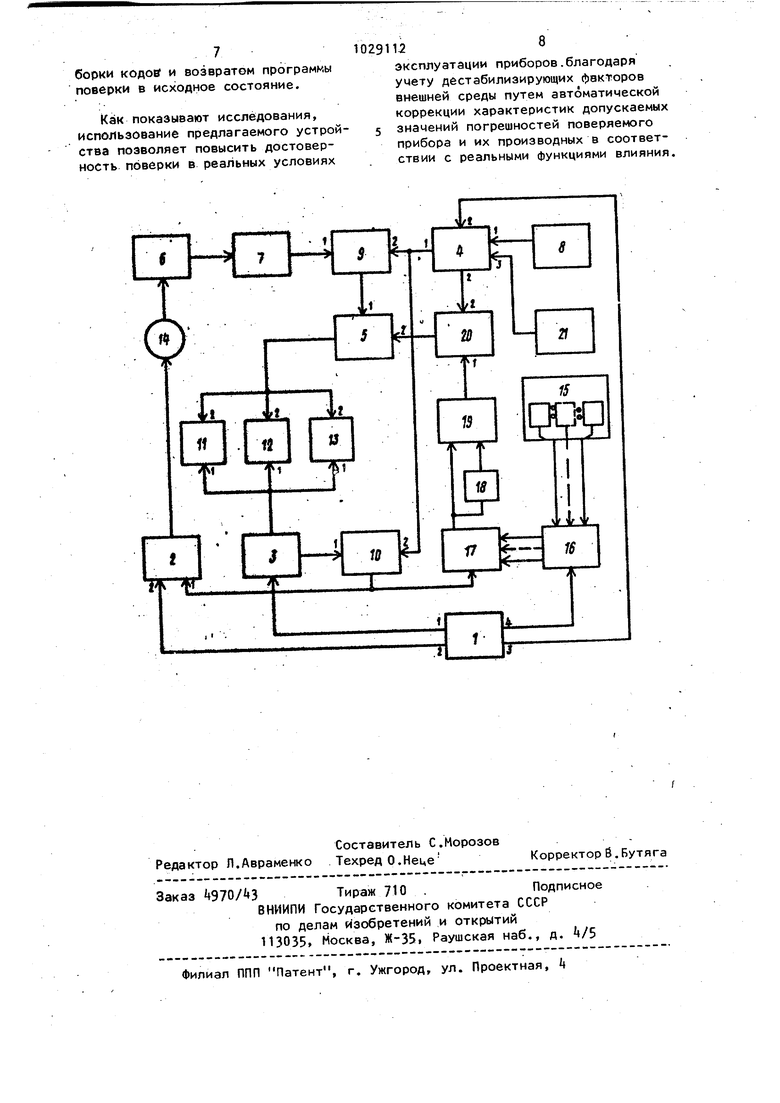
ее 1 Изобретение относится к измерительной технике и может быть испвяь зовано для автоматизированной повйр ки измерительных приборов, имеющих указатель и шкалу, в условиях воздействия дестабипизирующих факторов внешней среды. По основному авт. св. № 966632 известно устройство для автоматизмрованной поверки измерительных приборов, содержащее блок программы, источник эталонных сигналов, по ключенный к клеммам поверяемого при бора, датчик положения указателя, аналого-цифровой преобразователь, банк эталонных функций, блок выбор ки кодов, блок сравнения кодов, бло вычисления погрешностей, блок управ ления, блоки памяти,печати и отображения и пульт оператора. Это устройство обладает достаточной достоверностью благодаря возможности сра нения в процессе поверки текущих ко дов действительной и эталонной функ ции преобразования поверяемого прибора 1. Однако при наличии дестабилизирующих факторов р реальных условиях эксплуатации (температуры, давления ; влажности, вибрации ,уровня радиации и других) действительная функция преобразования поверяемого прибора претерпевает значительные изменения случайного характера, что приводит к появлению дополнительной погрешности. Поэтому это устройство не об печивает требуемую достоверность поверки в условиях воздействия этих дестабилизирующих факторов.внешней среды. Цель и;зобретения - повышение достоверности поверки измерительных приборов в условиях воздействия дестабилизирующих факторов внешней среды. Поставленная цель достигается тем, что в устройство для автоматизированной поверки приборов, содержащее последовательно соединенные пульт оператора, блок управления, блок программы, источник эталонных сигналов, своим вторым входом подключенный к второму выходу пульта оператора, клеммы подключения повер емого прибора, датчик положения ука зателя, аналого-цифровой преобразователь, блок сравнения кодов, блок вычисления погрешностей, своим: выходом связанный одновременно с бло21ками памяти, печати и отображения, управляющие входы которых связаны со вторым выходом блока управления, а также банк эталонных функций, связанный с первым входом блока выборки кодов, второй вход которого связан С третьим выходом пульта оператора, а выход - одновременно с вторыми входами блоков сравнения и программы, дополнительно введены последовательно соединенные блок датчиков параметров внешней среды, коммутатор датчиков, второй вход которого связан с дополнительным выходом пульта оператора, блок вычислителей функций влияния, второй вход которого связан с выходом упомянутого блока программы, дифференцирующий блок, блок аналого-цифровых преобразователей функций влияния, второй вход которого непосредственно связан с выяодо Л блока вычислителей функций влияния, и блок коррекции функций допускаемых значений погрешностей, выходом связанный с дополнительным входом блока вычисления-погрешностей, а также банк эталонных функций влияния, связанный с дополнительным входом блока выборки кодов, дополнительный выход которого связан с вторым входом блока коррекции функций допускаемых значений погрешностей. На чертеже представлена общая структурная схема устройства. Устройство содержит пульт 1 оператора, источник 2 эталонных сигналов, блок 3 управления, блок Ц выборки кодов, блок 5 вычисления погрешностей, датчик 6 положения указателя, аналого-цифровой преобразователь 7, банк 8 эталонных функций, блок 9 сравнения кодов, блок 10 программы, блоки памяти 11, печати 12 отображения 13, поверяемый прибор It, блок 15 датчиков параметров внешней среды, коммутатор 16 датчиков, блок 17 вычислителей функций влияния, дифференцирующий блок 18, блок 19 аналого-цифровых преобразователей функций влияния,,блок 20 коррекции функций допускаемых значений погрешностей, банк 21 эталонных функций влияния. Устройство работает следующим образом. Перед началом поверки оператор производит на пульте 1 оператора набор кода- поверяемого прибора Н а также кодов тех эталонных функций допускаемых значений основной погрешности Нэфопе и кодов эталонных функций влияния , которые подвергаются исследованию в процессе поверки. Команды в виде электрических сигналов AujCnn);, А(ЭФОП)р и А (ЭФВЬ , соответствующие набранным кодам, поступают в блок выборки кодов. С пульта 1 оператора подаются также выборочные .команды Tf,, Т или TQ, которые в виде электрических сигналов, соответственно Ajj(nM ), A.j(n4) или A(OTJ, поступают в блок 3 управле ния на разрешение включения в работу блоков памяти 11, печати 12 или отображения 13. На пульте 1 оператора набирается команда Тц в блок 3 управления, задающая необходимое ,количество циклов работы блока программы io с целью обеспечения заданного показателя качества поверки. Кроме того, с пульта 1 оператора подаются команды Т;1фАВ коммхтатор датчиков 1б для выбора и учета при поверке влияния заданного перечня (.числа ) дестабилизирующих факто . ров внешней среды (в соответствии с набранными кодами и команда предварительное вкпюче-. ние источника 2 эталонных сигналов. Блок k выборки кодов осуществляет распознавание набранного кода поверяемого прибора набранных кодов эталонных функций допускаемых значений погрешностей внутри массивов аналогичных кодов и ,хранящихся в банке 8 эталон ных функций, и производит синхронную выборку из банка 8 текущих кодо эталонной функции преобразования поверяемого прибора f(х)i, кодов е производных fj(x), f(х), текущих кодов заданных эталонных функций до пускаемых значений погрешностей 5зфоп( и кодов их производных эфопР соответствующих выявленном коду прибора. Кроме того, блок выборки кодов аналогич но осуществляет распознавание и выборку текущих кодов заданных эталон ных функций влияния Sэф&;И кодов их производных 5.И S5фgj из банка 21 эталонных функций влияния, соответствующих выявленному коду пове124ряемого прибора. При этом коды эталонной функции преобразования поверяемого прибора SfjCx) вместе с кодами ее производных Sf (х) и Sf(x) направляются из банка 8 эталонных функций через блок Ц выборки кодов одновременно в блок 9 сравнения кодов и блок программы 10, а код поверяемого прибора , (Текущие коды эталонных функций допускаемых значений погрешностей S р, S р, элопС банка 8 и текущие коды эталонных функций влияния S....,:, Sli,R:, -11-. л °3 . эфв банка 21 через блок выборки кодов k направляются в блок коррекции функций допускаемых значений погрешностей .20. Блок 15 датчиков параметров внешней среды осуществляет измерение параметров внешней среды j (температуры, давления, влажности, вибрации, уровня радиации и др.) и направляет текущую информацию о действительном значении факторов внешней среды по соответствующему каналу в коммутатор датчиков 16, где происходит, коммутация электрических сигналов L (л), пропорциональных измеренным знамениям параметров внешней среды, по командам -,,, с пульта 1 оператора с целью обеспечения учета раздельного или совместного действий дестабилизирующих факторов внешней среды. Эта информация L р (f |а) направляется . в блок 17 вычислителей функций влияния, который в..определеннь1е моменты времени, соответствующие шагу дискретизация эталонной функции преобразования fg(x) поверяемого прибора (сигналы v.,Q...j(ot) из блока программы 10), производит вычисление по заданному аг1горитму характеристик реальных функций влияния на погрешности поверяемого прибора от дестабилизирукицих факторов внешней среды. При этом вычисляются реальная функция влияния на характеристики систематической составляющей погрешности УрД.(Уй)., реальная функция влияния на характеристики случайной составляющей погрешности (CKO)Vp Л (р),-, реальная функция влияния на вариаци показаний «(f п) реальная фуисция влияния на приведенную погpeшнocть iЛд JJ,( каждой из перечисленных функции рассчитываются свои значения оценок статистических моментов (математического ожидания. СКО и др.). Текущие значения перечисленнйх. функций непосредственно и через дифференцирующий блок 18 направляются в блок 19 аналогоцифровых преобразователей функций влияния, где- производится преобразование входной аналоговой информации о текущих значениях деста билизирующих факторов с учетом ско рости и ускорения их изменения во времени в последовательности кодов ). , (f), и т.д., характеризующие реальные функции влияния на характеристики погрешности поверяемого прибора в конкретных условиях. Далее эти коды направляются в блок 20 коррекции функций допускаемых значений погрешностей, где производится по заданному алгоритму коррекция кодов эталонных функций допускаемых значений погрешностей поверяемого при6opa Sf )) Э 1-ДЭ /3, кодов их со ответствующих производных, поступающих из банка 8 эталонных функций через блок выборки кодов k, с уметом текущей разности dV(fn)i кодов реальной эталонной , функ ций влияния, поступающих соответственно из блока 19 и банка 21 эталон ных функций влияния. Скорректирован ные знамения эталонных функций допускаемых значений погрешности . ,. производными направляются в блок 5вычисления по грешностей. По команде Поверка (сигнал Ь аваемойс пульта 1 оператора, подаваемой блок 3 управления запускает в работу блок программы 10, который в соответствии с кодами эталонной функгции преобразования f(х) поверяемог прибора и кодами ее производных f,,(x) вырабатывает программ работы источника 2 эталонных сигнал и блока 17 вычислителей функций вли яния. Источник 2 nopaesT эталонные сигналы 2 .(oij в поверяемый прибор 1. Указатель поверяемого прибора .приходит в движение в соответствии с выражением х 1126 где kfip- коэффициент преобразования поверяемого прибора. Электрический датчик 6 фиксирует текущее положение указателя и выда ет аналоговые сигналы А/ (dji, (oi.)i, А(сзС,|) i, пропорциональные текущему положению указателя oCj, а.также скорости и ускорению его движения, в аналого-цифровой преобразователь 7, который преобразует их в последовательности кодов ), Sf(x), 5f(x), представляющие собой действительную функцию преобразования поверяемого прибора f(x)i и функции .ее производных f«(x)i, fl / fд(x) направляет их в блок сравнения кодов 9. Блок сравнения производит синхронное сравнение теку щих кодов действительной )l иэталонной fgCx)i функций преобразования поверяемого прибора и кодов их производных и выдает результаты сравнения. .Р(),| ) на прямом и обратном ходе указ ателя в блок 5 вычисления погрешностей. Кроме того, блок 9 осуществляет пересылку указанных кодов через блок 5 вычисления погрешностей в блоки 11, 12 или 13. Блок 5 вычисления погрешностей обрабатывает поступающую информацию и выдает результаты поверки. Результаты вычисления и проверки гипотез направляются в блоки памяти 11, печати 12 или отображения 13 в зависимости от разрешающих командВ ЛПМ), B,Jn4) или ) с блока 3 управления, поданых на управляющие - входы блоков 11, 12 и 3. При этом, в блоке 13 реализуется наглядная информация о соотношении действительной f(x) и эталонной функций f (х) поверяемого прибора, его код, соотчношение действительных характеристик погрешностей поверяемого прибора с его эталонными функциями допускаемых значений погрешностей, скорректированны с учетом реальных значении дестабилизирующих факторов внешней среды, а также результаты оценок метрологической годности поверяемого прибора по конкретной характеристике. Цикл работы блока 10 программы Заканчивается подачей в него си1- нального кода Из блока k выборки кодов и возвратом программы поверки в исходное состояние.
Как показывают исследования, использование предлагаемого устройства позволяет повысить достоверность поверки в реальных условиях
10291U8
эксплуатации приборов.благодаря умету дестабилизирующих факторов внешней среды путем автоматической коррекции характеристик допускаемых 5 значений погрешностей поверяемого прибора и их производных в соответствии с реальными функциями влияния.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматизированной поверки измерительных приборов | 1986 |
|
SU1348761A1 |
| Устройство для автоматизированной поверки измерительных приборов | 1982 |
|
SU1051478A2 |
| Устройство для автоматизированной поверки измерительных приборов | 1983 |
|
SU1128210A2 |
| Установка для автоматизированной поверки измерительных приборов | 1984 |
|
SU1164638A2 |
| Устройство для автоматизированной поверки приборов | 1980 |
|
SU966632A1 |
| Способ имитационной поверки средств измерения и комплекс для его осуществления | 2024 |
|
RU2838347C1 |
| Способ беспроводной передачи цифровых панорамных аэровидеоизображений | 2018 |
|
RU2707139C1 |
| Автоматическая установка для поверкицифРОВыХ изМЕРиТЕльНыХ пРибОРОВ и пРЕ-ОбРАзОВАТЕлЕй | 1979 |
|
SU815899A1 |
| Устройство для поверки ваттметров | 1985 |
|
SU1267312A1 |
| Способ поверки электроизмерительного прибора | 2021 |
|
RU2812229C2 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ПОВЕРКИ ПРИБОРОВ по авт, св. № 966632, о т л и ч а ю щ е вся тем, что, с целью повышения достоверности пбверки из
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматизированной поверки приборов | 1980 |
|
SU966632A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
