Изобретение относится к области передачи видеоизображений, в частности, к способам беспроводной передачи цифровых панорамных аэровидеоизображений и может быть применено в системах сбора и передачи видеоинформации, построенных на базе малогабаритных беспилотных летательных аппаратов, например в системах мониторинга состояния автотранспортных потоков мегаполисов и системах мониторинга пожарной обстановки лесных массивов с помощью квадрокоптеров.
Известен аналогичный способ беспроводной передачи цифровых панорамных аэровидеоизображений, описанный в инструкции по эксплуатации квадрокоптера Syma х5с, которую в электронном виде можно найти в сети «Интернет» на сайте: http://mykvadrocopter.ru/instruktsii-dly-kvadrocopterov/#Syma, а также на сайте: http://meeke.ru/instruktsiya-syma-x5c-na-russkom-yazyke/ и состоящий в следующем: перед использованием квадрокоптера полностью заряжают его аккумуляторную батарею, далее на квадрокоптер устанавливают беспроводное приемно-передающее устройство с микроконтроллером, радиоантенной и датчиком цифровых видеоизображений, далее включают системы электропитания квадрокоптера, его приемно-передающего устройства и пульта дистанционного управления квадрокоптером, также имеющего беспроводное приемно-передающее устройство с микроконтроллером и радиоантенной, после этого с помощью управляющих радиосигналов от пульта выводят квадрокоптер в нужную точку воздушного пространства, далее в течение наперед заданного интервала времени, не превышающего время полной разрядки аккумуляторной батареи квадрокоптера, с помощью датчика видеоизображений осуществляют панорамную съемку местности, при этом положение квадрокоптера корректируют во время съемки с помощью пульта дистанционного управления, а получаемые видеоизображения посредством радиосигнала с цифровой модуляцией кадр за кадром передают на пульт управления и выводят на его встроенный дисплей в режиме реального времени, после чего приземляют квадрокоптер с помощью пульта дистанционного управления и отключают электропитание всех устройств.
Недостатком указанного аналога является невозможность стабилизации в режиме реального времени отношения сигнал-шум радиосигнала, несущего видеоизображения, с учетом изменяющегося расстояния между антеннами квадрокоптера и пульта управления, а также в условиях нестабильного уровня внешних помех, что приводит к неравномерности качества передаваемых видеоизображений на стороне приема и снижает достоверность статистических сведений при их обработке, в частности при распознавании и подсчете фрагментов изображений заданного типа.
В качестве прототипа выбран способ беспроводной передачи цифровых панорамных аэровидеоизображений описанный в инструкции по эксплуатации квадрокоптера Syma х5с, которую в электронном виде можно найти в сети «Интернет» на сайте: http://mykvadrocopter.ru/instruktsii-dly-kvadrocopterov/#Syma, а также на сайте: http://meeke.ru/instruktsiya-syma-x5c-na-russkom-yazyke/ и состоящий в следующем: перед использованием квадрокоптера полностью заряжают его аккумуляторную батарею, далее на квадрокоптер устанавливают беспроводное приемно-передающее устройство с микроконтроллером, радиоантенной и датчиком цифровых видеоизображений, далее включают системы электропитания квадрокоптера, его приемно-передающего устройства и пульта дистанционного управления квадрокоптером, также имеющего беспроводное приемно-передающее устройство с микроконтроллером и радиоантенной, после этого с помощью управляющих радиосигналов от пульта выводят квадрокоптер в нужную точку воздушного пространства, далее в течение наперед заданного интервала времени, не превышающего время полной разрядки аккумуляторной батареи квадрокоптера, с помощью датчика видеоизображений осуществляют панорамную съемку местности, при этом положение квадрокоптера корректируют во время съемки с помощью пульта дистанционного управления, а получаемые видеоизображения посредством радиосигнала с цифровой модуляцией кадр за кадром передают на пульт управления и выводят на его встроенный дисплей в режиме реального времени, после чего приземляют квадрокоптер с помощью пульта дистанционного управления и отключают электропитание всех устройств.
Недостатком прототипа является невозможность стабилизации в режиме реального времени отношения сигнал-шум радиосигнала, несущего видеоизображения, с учетом изменяющегося расстояния между антеннами квадрокоптера и пульта управления, а также в условиях нестабильного уровня внешних помех, что приводит к неравномерности качества передаваемых видеоизображений на стороне приема и снижает достоверность статистических сведений при их обработке, в частности при распознавании и подсчете фрагментов изображений заданного типа.
Задачей технического решения является обеспечение стабилизации отношения сигнал-шум для несущих изображения радиосигналов с цифровой модуляцией и сохранение качества передаваемых изображений в условиях меняющегося расстояния передачи и нестабильного уровня внешних помех, а также на повышение точности предварительной расчетной оценки минимально необходимого значения амплитуды сигнала изображений.
Поставленная задача решается благодаря тому, что предлагается способ беспроводной передачи цифровых панорамных аэровидеоизображений, заключающийся в том, что в квадрокоптере, имеющем беспроводное приемно-передающее устройство с микроконтроллером, радиоантенной и датчиком цифровых видеоизображений, в каждой временной паузе между передачей изображений, минимальное ненулевое значение амплитуды полезного сигнала, несущего информацию изображений, переустанавливают микроконтроллером квадрокоптера в режиме реального времени согласно формуле
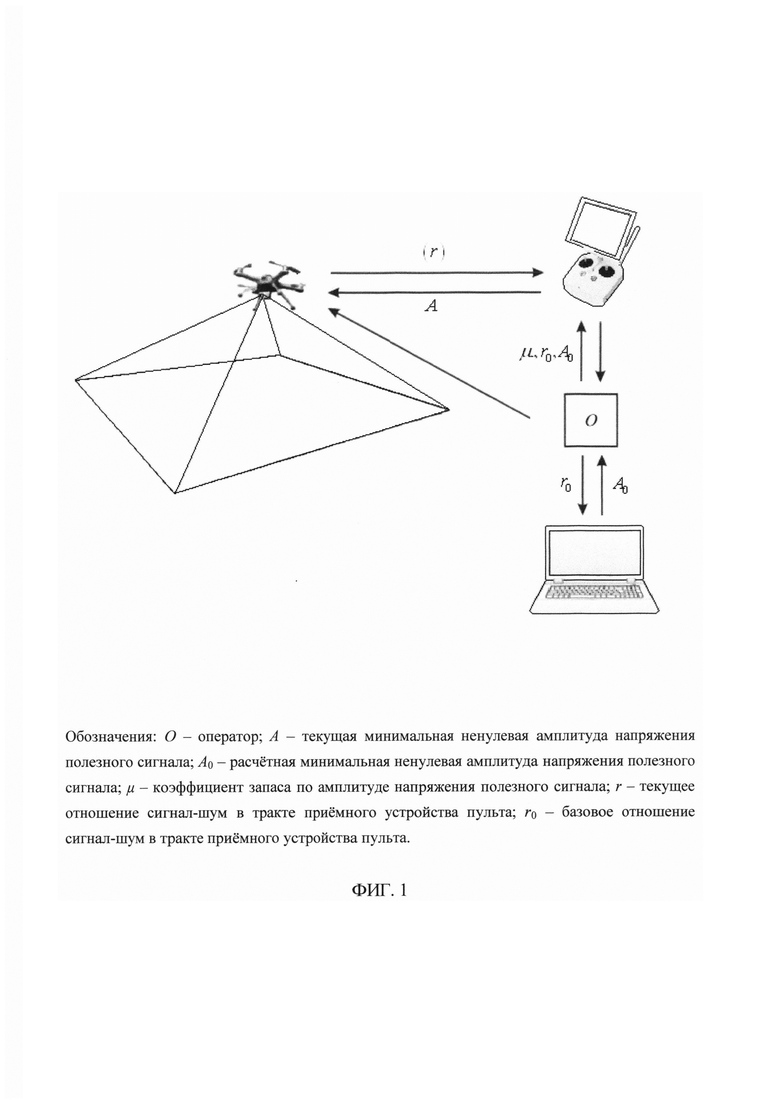
А - текущая минимальная ненулевая амплитуда напряжения полезного сигнала;
А0 - расчетная минимальная ненулевая амплитуда напряжения полезного сигнала;
μ - коэффициент запаса по амплитуде напряжения полезного сигнала;
r - текущее отношение сигнал-шум в тракте приемного устройства пульта;
r0 - расчетное отношение сигнал-шум в тракте приемного устройства пульта;
при этом очередное расчетное значение А предварительно пересчитывают микроконтроллером пульта управления и передают микроконтроллеру квадрокоптера посредством радиосигнала по принципу обратной связи, в случае амплитудной модуляции уровни амплитуд всего ансамбля сигналов пропорционально пересчитывают сразу после получения текущего значения А и с тем же процентным изменением относительно предыдущих уровней, которое претерпела величина А, работу приемно-передающих устройств квадрокоптера и пульта управления синхронизируют во времени предварительно на программно-аппаратном уровне, все параметры расчетной формулы для А задают действительными числами, значения параметров r0, A0, μ подбирают и сохраняют в памяти микроконтроллера пульта управления перед использованием квадрокоптера, значения параметров r, А пересчитывают в режиме реального времени в каждой временной паузе между передачей изображений, минимум и максимум А задают предварительно в зависимости от максимальной дальности передачи сигнала и мощности передающего устройства квадрокоптера, в том случае, если после очередного перерасчета значение А оказывается меньше своего допустимого минимума, то используют минимум А, в том случае, если после очередного перерасчета значение А превышает свой максимум, то используют максимум А, коэффициент запаса по амплитуде μ задают предварительно положительным числом большим единицы с учетом диаграмм направленности антенн и сохраняют в памяти микроконтроллера квадрокоптера перед использованием квадрокоптера, расчетное значение отношения сигнал-шум r0 в тракте приемного устройства пульта задают предварительно, текущее отношение сигнал-шум r оценивают по дискретным числовым выборкам, которые получают в тракте приемного устройства после полосового фильтра и одного или нескольких каскадов усиления, но перед блоком демодуляции сигнала, номер последнего учитываемого каскада усиления выбирают предварительно, для оценки r в каждом временном промежутке между передачей изображений используют два расчетных временных интервала длительностью по 1 мс, расположенных на временной оси непосредственно друг за другом, в течение первого расчетного временного интервала с помощью микроконтроллера квадрокоптера на центральной несущей частоте передают по радиоканалу изображений эталонный синусоидальный сигнал с постоянным значением амплитуды, равной текущему значению А, в течение второго расчетного временного интервала амплитуду полезного сигнала выдерживают микроконтроллером квадрокоптера нулевой, о начале каждого из интервалов сигнализируют микроконтроллеру пульта по этому же радиоканалу отдельно посредством передачи уникальных битовых комбинаций, вид которых выбирают предварительно, в течение первого временного интервала с помощью аналогово-цифрового преобразователя микроконтроллера пульта получают и сохраняют выборку сигнала, в течение второго временного интервала с помощью аналогово-цифрового преобразователя микроконтроллера пульта получают и сохраняют выборку шума, запись выборок начинают сразу после получения соответствующих сигналов о начале временных расчетных интервалов, количества элементов каждой из выборок устанавливают одинаковыми и не меньшими 50 чисел, после этого на основе полученных выборок рассчитывают текущее отношение сигнал-шум r как отношение средних арифметических для квадратов напряжений выборок сигнала и шума, расчетное значения амплитуды А0 полезного сигнала подбирают предварительно с помощью высокопроизводительного вычислительного устройства, при оценке значения А0 используют прямоугольную декартову систему координат с осями времени t и координаты х, начало системы координат совмещают с фазовым центром антенны квадрокоптера, ось х направляют таким образом, чтобы она проходила через фазовый центр антенны пульта управления, оценку значения величины А0 проводят путем подбора и с помощью многократного нахождения приближенного решения комплексного уравнения в частных производных второго порядка вида
u1(t,x) - функция внешних возмущений;
u2(t,x) - искомая функция, эквивалент напряжения распространения;
q1,q2,q3,q4,q5 - коэффициенты, учитывающие свойства среды;
m - индекс коэффициентов уравнения с частными производными;
Im qm - мнимая часть m-го коэффициента;
t - время;
х - координата;
T - максимальное значение времени;
L - максимальное значение координаты;
N - множество натуральных чисел;
R - множество действительных чисел;
С - множество комплексных чисел;
с краевыми и начальными условиями
данное уравнение решают с помощью вычислительного устройства, все двумерные действительные параметры математической модели на основе записанного уравнения и двумерные части комплексных функций в памяти вычислительного устройства представляют числовыми матрицами, а все одномерные действительные параметры и одномерные части комплексных параметров задают одномерными числовыми массивами, за счет подбора значений действительных частей комплексных коэффициентов q1,q2,q3,q4,q5 учитывают свойства среды распространения радиосигнала, при этом в зависимости от свойств среды коэффициенты q1,q2,q3,q4,q5 задают постоянными или переменными по одному или обоим аргументам t и x, далее для действительных и мнимых частей функций u1(t,x), u2(t,x) вводят двумерную дискретную решетку, количество узлов решетки и размер постоянных приращений по времени t и координате х подбирают предварительно в зависимости от максимального значения несущей частоты полезного сигнала и максимального расстояния его передачи, возмущающие воздействия располагают в действительной части функции u1(t,x), которую в начале координат ассоциируют с антенной квадрокоптера и задают с помощью формулы

Re u1(t,0) - действительная часть u1(t,0);
Im u1(t,0) - мнимая часть u1(t,0);
s(t) - полезный сигнал для передачи изображений;
e1(t) - собственный шум передающего устройства квадрокоптера;
k1 - коэффициент поправки сигнала в ближней зоне;
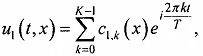
в остальной части области определения и действительную, и мнимую составляющие u1(t,x) задают нулевыми значениями, после этого для согласования краевых и начальных условий значения u1(0,0) и u1(Т,0) обнуляют, за счет коэффициента пропорциональности k1 корректируют уровень полезного сигнала в ближней зоне, значение k1 подбирают предварительно и задают положительным числом, функцию s(t) задают эталонным фрагментом полезного сигнала с амплитудной или частотной цифровой модуляцией, в котором в случае амплитудной модуляции размещают как минимум один временной отрезок с минимальной ненулевой амплитудой сигнала, эталонный фрагмент сигнала подготавливают заранее и сохраняют в памяти вычислительного устройства, массив для e1(t) формируют генератором случайных чисел вычислительного устройства, при этом максимальный уровень e1(t) оценивают предварительно путем измерения максимального уровня напряжения собственного шума передающего устройства квадрокоптера при отсутствии полезного сигнала s(t), замер производят в последнем каскаде усиления перед антенным устройством, уравнение в частных производных решают на основе метода Фурье с разложением функций u1(t,x) и u2(t,x) по временному базису с несколькими гармониками

с1,k(х) - k-й коэффициент разложения Фурье функции u1(t,x);
с2,k(х) - k-й коэффициент разложения Фурье функции u2(t,x);
i - мнимая единица;
π - константа, равная 3.14;
k - индекс коэффициентов разложения Фурье;
K - количество коэффициентов разложения Фурье;
Z - множество целых чисел;
причем количество коэффициентов разложения K задают предварительно числом большим или равным одной четвертой от количества узлов дискретной решетки по оси времени t и меньшим или равным этому количеству, далее, согласно записанным формулам разложения, находят выражения для комплексных частных производных u2(t,x), подставляют их вместе с разложениями u2(t,x) и u1(t,x) в исходное уравнение в частных производных, приводят подобные слагаемые и получают множество комплексных обыкновенных дифференциальных уравнений второго порядка вида
p1,k,p2,k,р3,k - комплексные коэффициенты обыкновенного дифференциального уравнения для k-го коэффициента c2,k(x);
после этого коэффициенты разложения c1,k(x) функции внешних возмущений u1(t,x) в правых частях этих уравнений получают с помощью постолбцового одномерного прямого комплексного дискретного преобразования Фурье, применяемого к u1(t,x) в каждой координатной отметке поочередно, а значения р1,k,р2,k,р3,k задают с помощью формулы

причем в случае переменных коэффициентов q1,q2,q3,q4,q5 значения p1,k,p2,k,p3,k пересчитывают каждый раз, когда меняется значение хотя бы одного из коэффициентов g1,q2,q3,q4,q5, значения q1,q2,q3,q4,q5 задают предварительно таким образом, чтобы обеспечить устойчивость решения обыкновенного дифференциального уравнения при всех возможных сочетаниях q1,q2,q3,q4,q5, далее поочередно вычисляют коэффициенты разложения с2,k(х), при этом действительные и мнимые части с2,k(х) в первом координатном узле с учетом краевых условий сразу приравнивают соответствующим значениям с1,k(х), то есть

с2,k,1 - значение k-го коэффициента с2,k(х) в первом координатном узле;
с1,k,1 - значение k-го коэффициента с1,k(х) в первом координатном узле;
Re - обозначение действительных частей коэффициентов;
Im - обозначение мнимых частей коэффициентов;
в остальных координатных узлах, начина со второго, значения с2,k(х) находят по формуле

с2,k,n - значение k-го коэффициента с2,k(х) в n-ом координатном узле;
n - индекс координатного узла;
h1,h2,h3,h4 - вспомогательные параметры;
Re - обозначение действительных частей коэффициентов;
Im - обозначение мнимых частей коэффициентов;
при вспомогательных обозначениях
с1,k,n - значения k-то коэффициента с1,k(х) в n-ом координатном узле;
Δх - величина приращения (постоянный дискретный шаг) по оси х;
Re - обозначение действительных частей выражений в скобках;
Im - обозначение мнимых частей выражений в скобках;
после вычисления всех коэффициентов с2,k(х) возвращаются к разложению искомой функции и получают ее в комплексной форме путем постолбцового одномерного обратного комплексного дискретного преобразования Фурье, применяемого к u2(t,x) в каждой координатной отметке поочередно, эквивалент напряжения распространения извлекают из действительной части u2(t,x), далее учитывают собственные шумы предусилителя приемного устройства пульта управления и внешние помехи радиоканала согласно формуле
u3(t) - напряжение принятого информационного сигнала до фильтра;
 - действительная часть u2(t,x) на расчетном расстоянии;
- действительная часть u2(t,x) на расчетном расстоянии;
 - расчетное расстояние;
- расчетное расстояние;
k2 - коэффициент предусилителя приемного устройства пульта;
e2(t) - внешние помехи на расчетном расстоянии;
е3(t) - собственный шум предусилителя приемного устройства пульта;
при этом расчетное расстояние  между антеннами в модели выбирают предварительно, массивы для e2(t) и e3(t) формируют генератором случайных чисел вычислительного устройства, максимальный уровень e2(t) принимают равным предполагаемому максимуму напряжения помех в точке приема, максимальный уровень е3(t) оценивают предварительно путем измерения максимального уровня напряжения собственного шума предусилителя приемного устройства пульта, расположенного на входе приемного устройства перед полосовым фильтром и при условии наличия данного предусилителя, перед измерением максимума е3(t) отключают на время передающее устройство квадрокоптера, значение k2 задают предварительно и равным коэффициенту усиления предусилителя устройства пульта, а в случае его отсутствия k2 приравнивают единице и массив для е3(t) заполняют нулевыми значениями, далее к u3(t) применяют модель полосового фильтра, характеристики которой подбирают предварительно и согласовывают с характеристиками реального полосового фильтра на входе приемного устройства пульта управления, при необходимости в случае частотной модуляции применяют параллельный каскад моделей полосовых фильтров, на выходе модели фильтра получают сигнал u4(t), далее сигнал u4(t) домножают на общий коэффициент всех каскадов усиления k3 реального тракта приемного с вовлечением собственных шумов первого после фильтра каскада усиления согласно формуле
между антеннами в модели выбирают предварительно, массивы для e2(t) и e3(t) формируют генератором случайных чисел вычислительного устройства, максимальный уровень e2(t) принимают равным предполагаемому максимуму напряжения помех в точке приема, максимальный уровень е3(t) оценивают предварительно путем измерения максимального уровня напряжения собственного шума предусилителя приемного устройства пульта, расположенного на входе приемного устройства перед полосовым фильтром и при условии наличия данного предусилителя, перед измерением максимума е3(t) отключают на время передающее устройство квадрокоптера, значение k2 задают предварительно и равным коэффициенту усиления предусилителя устройства пульта, а в случае его отсутствия k2 приравнивают единице и массив для е3(t) заполняют нулевыми значениями, далее к u3(t) применяют модель полосового фильтра, характеристики которой подбирают предварительно и согласовывают с характеристиками реального полосового фильтра на входе приемного устройства пульта управления, при необходимости в случае частотной модуляции применяют параллельный каскад моделей полосовых фильтров, на выходе модели фильтра получают сигнал u4(t), далее сигнал u4(t) домножают на общий коэффициент всех каскадов усиления k3 реального тракта приемного с вовлечением собственных шумов первого после фильтра каскада усиления согласно формуле
u5(t) - напряжение на выходе модели;
u4(t) - напряжение на выходе полосового фильтра в модели;
k3 - общий коэффициент усиления каскадов от фильтра до демодулятора;
е4(t) - собственный шум первого после фильтра каскада усиления;
массив для e4(t) формируют генератором случайных чисел вычислительного устройства, максимальный уровень e4(t) оценивают предварительно путем измерения максимального уровня напряжения собственного шума первого после полосового фильтра каскада усиления, перед измерением максимума e4(t) на время отключают передающее устройство квадрокоптера, при оценке k3 охватывают все каскады усиления, расположенные в тракте приемного устройства пульта от полосового фильтра до демодулятора, то есть до места предполагаемого подключения аналогово-цифрового преобразователя в реальной схеме, в результате усиления получают выходной сигнал модели u5(t), уравнение в частных производных решают при разных значениях А0 полезного сигнала до тех пор, пока значение отношения сигнал-шум для u5(t) в модели не войдет в требуемый диапазон
S - уровень сигнала на выходе модели;
Е - уровень шума на выходе модели;
оценку каждого очередного отношения сигнал-шум на выходе модели проводят на фрагменте эталонного сигнала с минимальным уровнем амплитуды, уровень сигнала S рассчитывают как среднее арифметическое для квадратов напряжений одномерной выборки u5(t) при отсутствии шумов и помех, то есть при нулевых е1(t),е2(t),e3(t),e4(t), уровень шума Е рассчитывают как среднее арифметическое для квадратов напряжений одномерной выборки u5(t) на выходе модели при отсутствии полезного сигнала, то есть при нулевом s(t).
Кроме того, если в частном случае действительная часть коэффициента q3 равна нулю, то в ходе моделирования каждый из коэффициентов c2,k(x) в координатных узлах дискретной решетки рассчитывают по упрощенной формуле
с последовательным вычислением действительной и мнимой частей с2,k,n, при этом условие равенства действительной части q3 нулю проверяют до применения основной расчетной формулы с параметрами h1,h2,h3,h4.
Сущность заявляемого технического решения поясняется следующими дополнительными материалами:
ФИГ. 1 Пояснение к заданию и получению основных расчетных параметров;
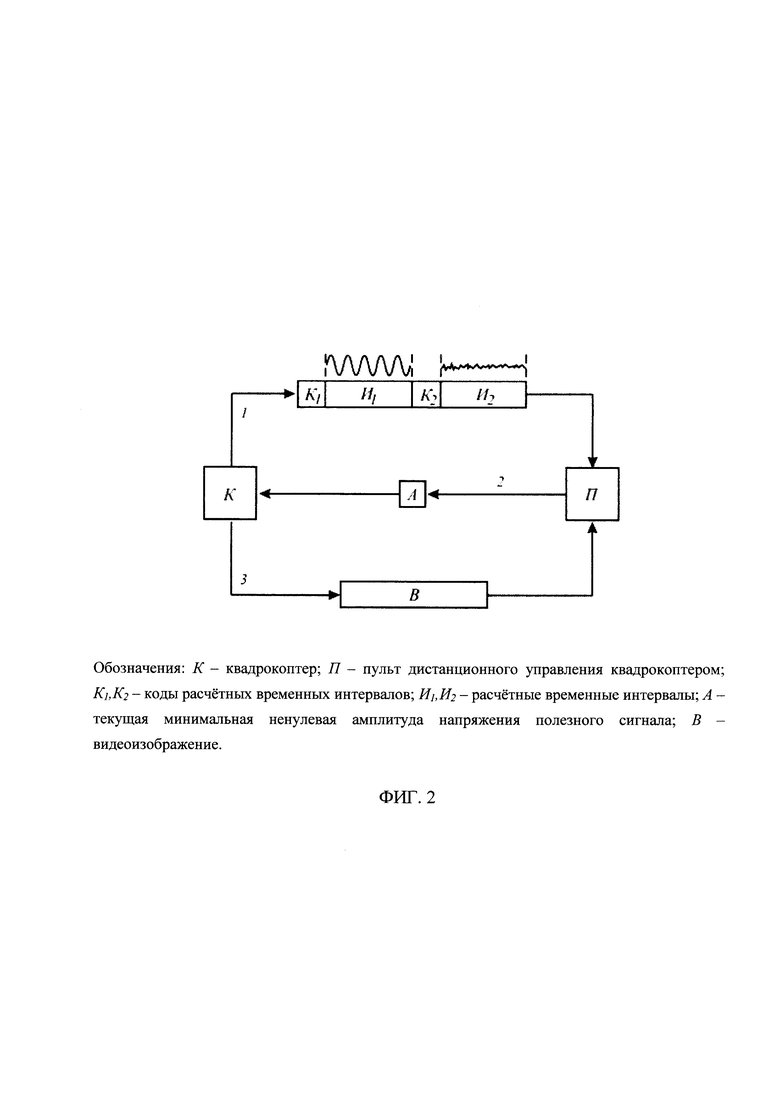
ФИГ. 2. Последовательность действий во временном цикле передачи изображений;
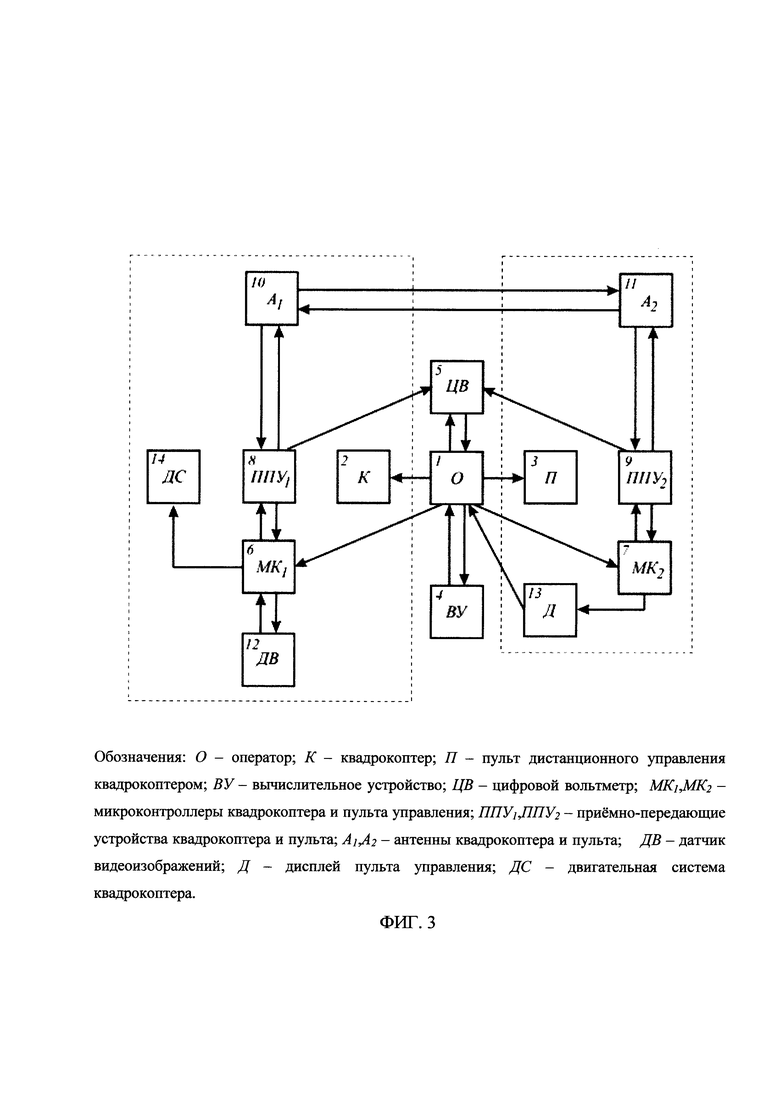
ФИГ. 3. Схема для пояснения осуществления способа;
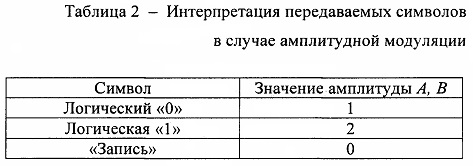
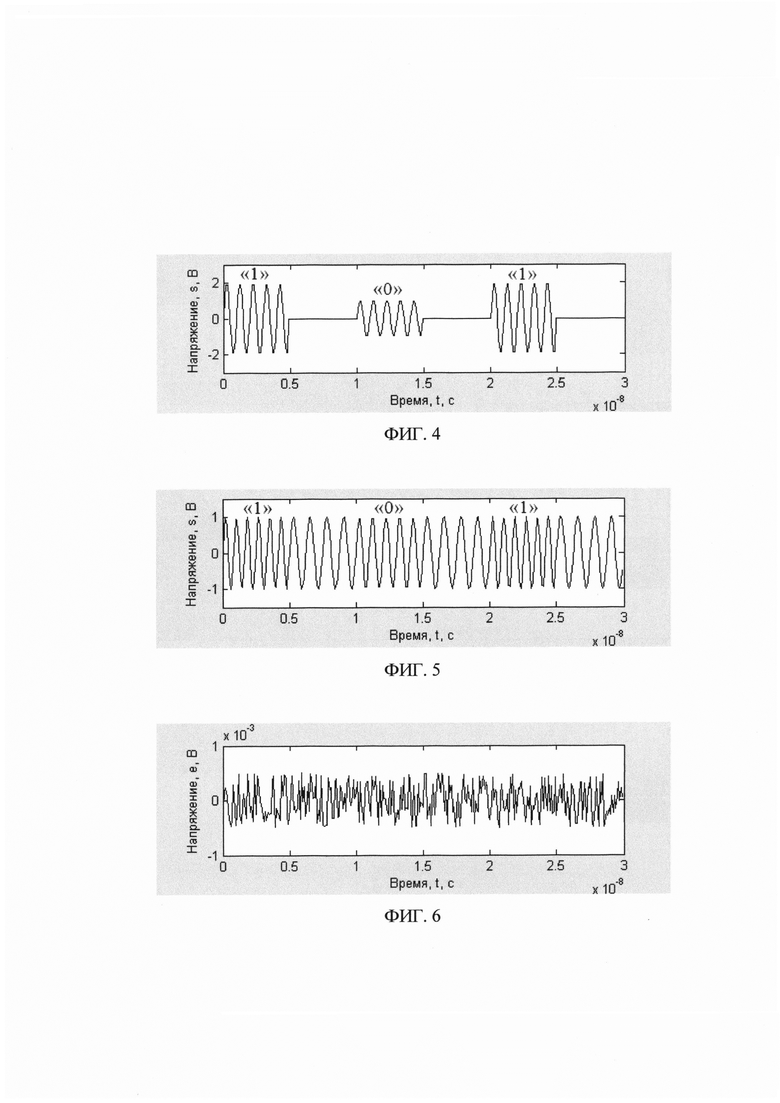
ФИГ. 4. Пример полезного сигнала с амплитудной цифровой модуляцией;
ФИГ. 5. Пример полезного сигнала с частотной цифровой модуляцией;
ФИГ. 6. Пример графика шума;
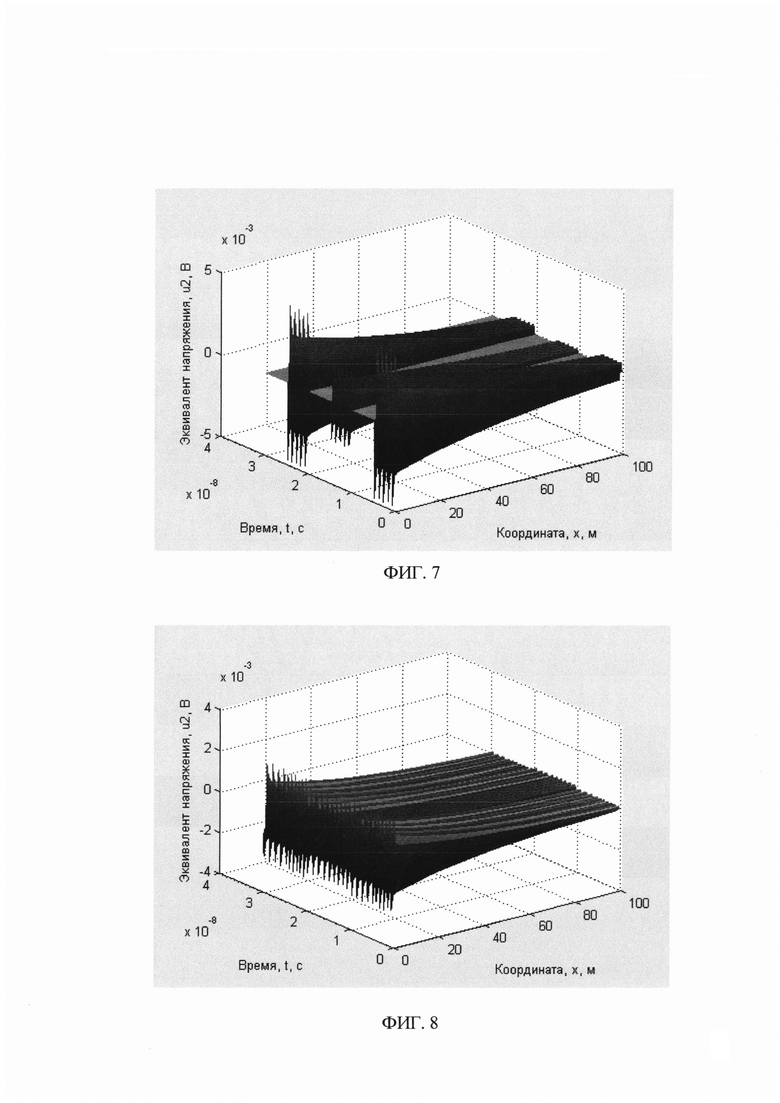
ФИГ. 7. Пример графика эквивалента напряжения распространения сигнала без учета шумов и помех (амплитудная модуляция);
ФИГ. 8. Пример графика эквивалента напряжения распространения сигнала без учета шумов и помех (частотная модуляция);
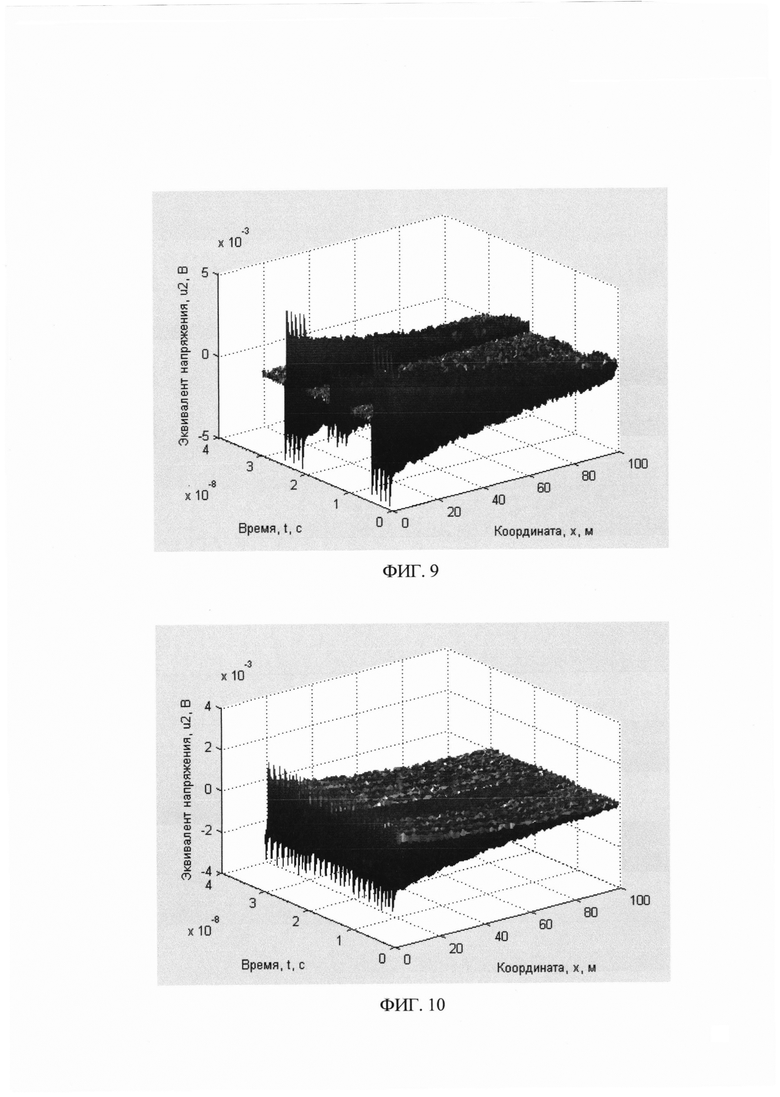
ФИГ. 9. Пример графика эквивалента напряжения распространения сигнала с учетом шумов и помех (амплитудная модуляция);
ФИГ. 10. Пример графика эквивалента напряжения распространения сигнала с учетом шумов и помех (частотная модуляция);
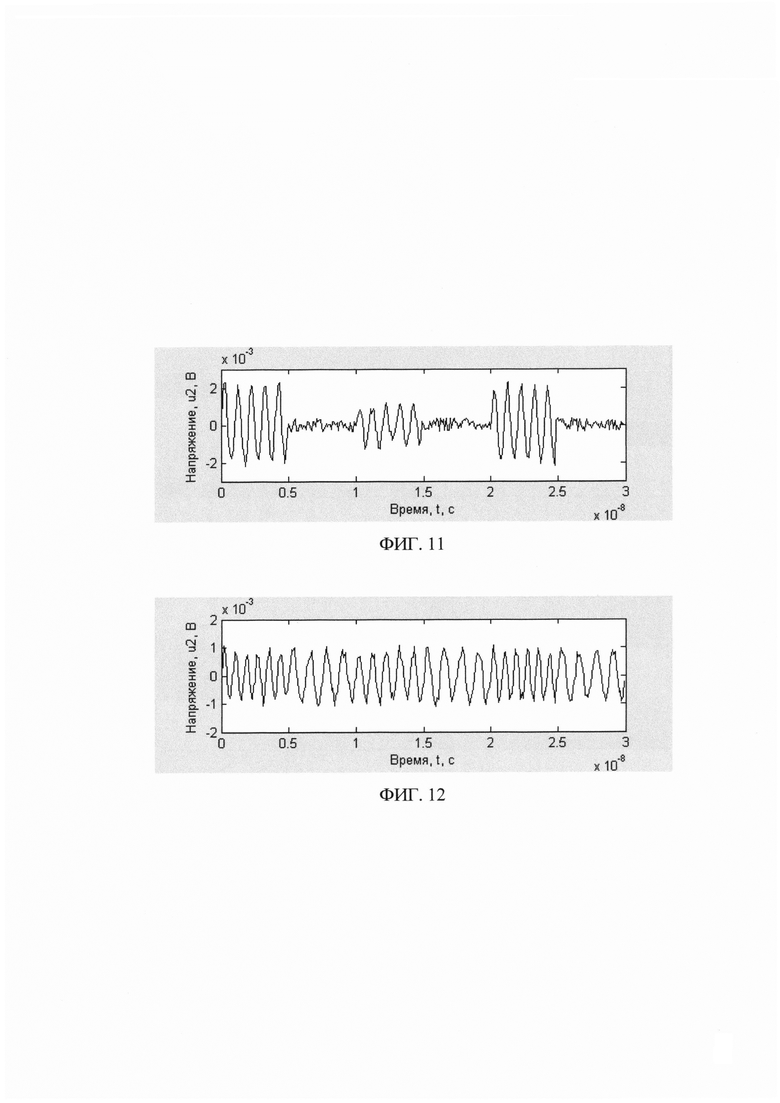
ФИГ. 11. Пример графика напряжения принятого сигнала на антенне пульта с учетом шумов и помех (амплитудная модуляция);
ФИГ. 12. Пример графика напряжения принятого сигнала на антенне пульта с учетом шумов и помех (частотная модуляция);
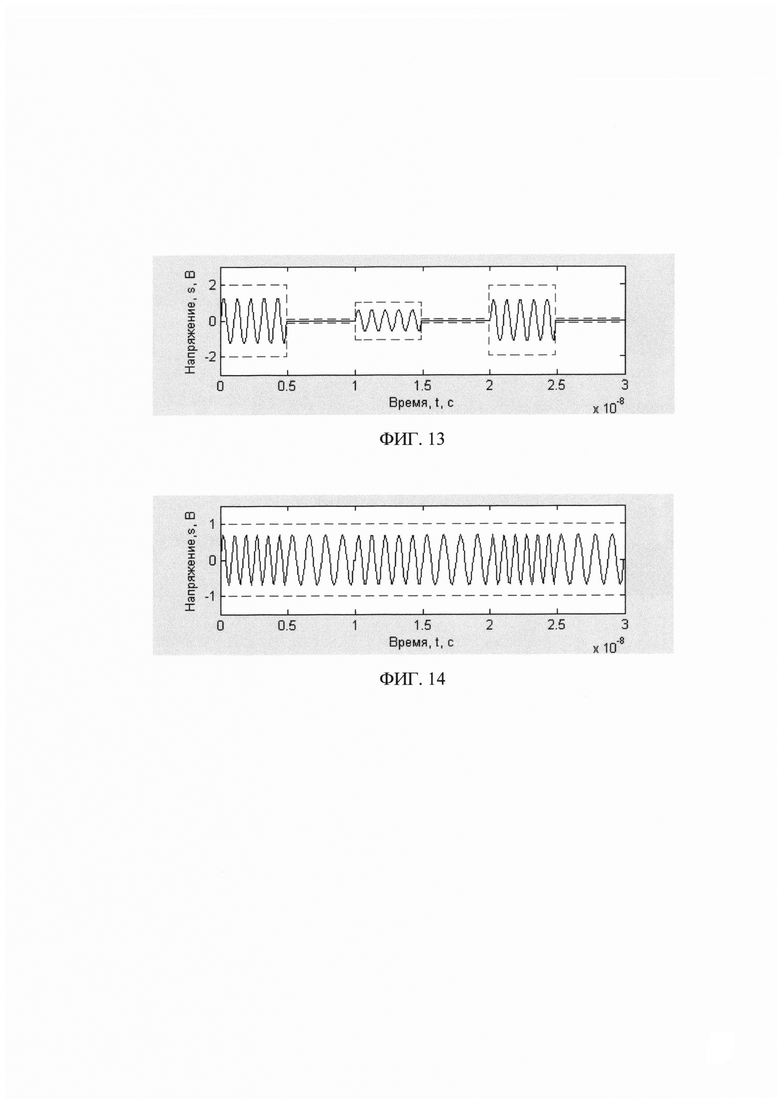
ФИГ. 13. Пояснение к достижению технического эффекта (амплитудная модуляция);
ФИГ. 14. Пояснение к достижению технического эффекта (частотная модуляция);
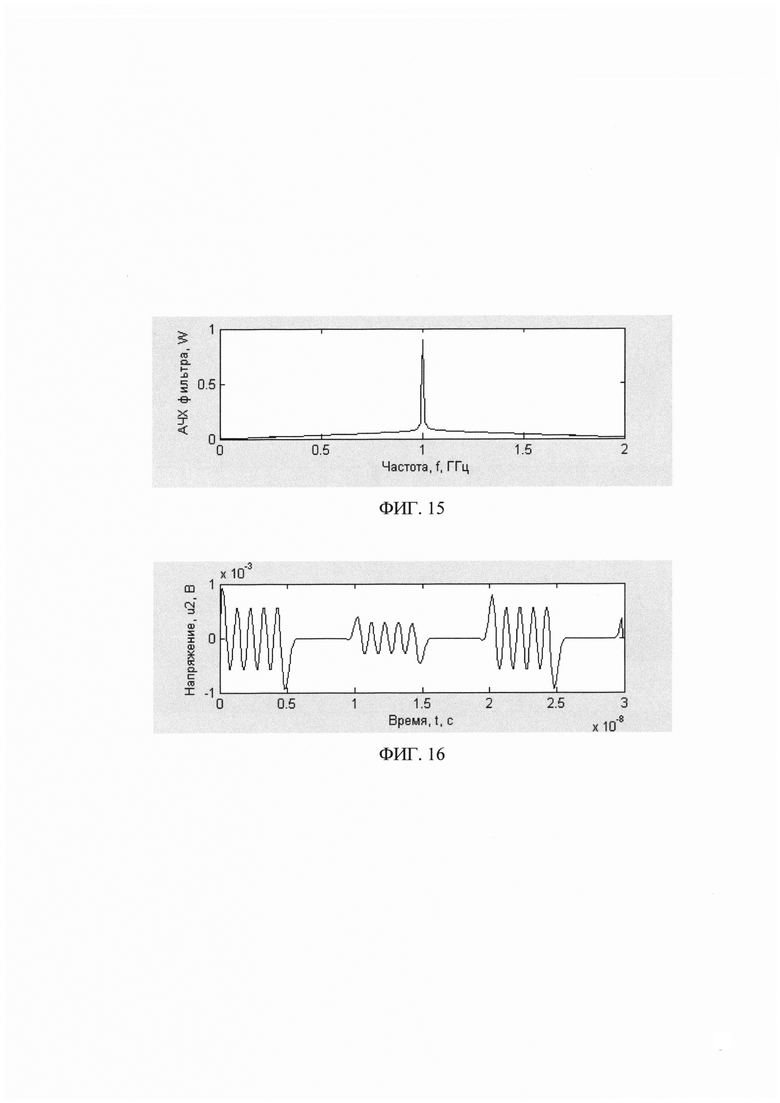
ФИГ. 15. Пример амплитудно-частотной характеристики одной из моделей полосового фильтра;
ФИГ. 16. Пример сильного влияния сходимости рядов Фурье.
Для раскрытия осуществления изобретения воспользуемся фигурами ФИГ. 1 - ФИГ. 3. На ФИГ. 1 показан общий принцип формирования и передачи основных расчетных параметров, а также в общих чертах раскрыто взаимодействие элементов схемы. В частности показано, что параметр r0 задается оператором, параметр А0 подбирается в ходе моделирования, а оба указанных параметра наряду с μ записываются в память микроконтроллера пульта. Параметр А «пересылается» от пульта управления квадрокоптеру. Величина r взята в скобки, поскольку пересчитывается в тракте приемного устройства пульта, но согласовано во времени с микроконтроллером квадрокоптера (на основе временных расчетных интервалов). На схеме отражено также, что оператор, не передает никаких параметров квадрокоптеру, однако он записывает специальное программное обеспечение в его память.
Для более детального пояснения последовательности действий во время цикла передачи изображений приведена ФИГ. 2. Она отражает, что в каждой указанной временной паузе сначала следуют два временных расчетных интервала, на основе которых микроконтроллером пульта пересчитывается текущее значение r, а затем и текущее значение А. Далее это значение А передается микроконтроллеру квадрокоптера, который переназначает амплитуды всего ансамбля символов. И только после этого микроконтроллер квадрокоптера «отправляет» видеоизображение (уже с новыми уровнями амплитуд).
Наиболее полно осуществление способа раскрывает ФИГ. 3. Опишем процесс осуществления способа, ориентируясь на эту схему. Перед осуществлением способа все устройства находятся в выключенном состоянии. При осуществлении способа оператор 1 предварительно заряжает аккумуляторную батарею квадрокоптера 2, после чего включает электропитание квадрокоптера 2, пульта дистанционного управления квадрокоптером 3, высокопроизводительного вычислительного устройства 4 и цифрового вольтметра 5. Далее оператор 1 с помощью цифрового вольтметра 5 измеряет максимальные значения собственных шумов для е1(t),е3(t),е4(t), приемно-передающих устройств 8 и 9 квадрокоптера 2 и пульта 3. Максимум для e1(t) оператор 1 измеряет при отсутствии полезного сигнала изображений. Перед измерением максимумов для е3(t) и e4(t) оператор 1 на время отключает передающее устройство квадрокоптера 2. Измеренные значения оператор 1 дополняет предполагаемым максимальным уровнем помех радиоканала для e2(t), после чего вводит параметры шумов и помех в память вычислительного устройства 4 в качестве исходных данных.
После этого оператор 1 задает и сохраняет в памяти вычислительного устройства 4 эталонный фрагмент сигнала с амплитудной или частотной цифровой модуляцией s(t), расчетное расстояние между антеннами 10 и 11 квадрокоптера 2 и пульта 3, а также требуемое базовое значение отношения сигнал-шум r0 в приемной части тракта приемно-передающего устройства 9 пульта 3. Далее оператор 1 на вычислительном устройстве 4 путем многократного моделирования и приближенного решения уравнения распространения радиосигнала подбирает расчетное значение А0 минимальной амплитуды полезного сигнала для передачи изображений. Затем оператор 1 задает коэффициент запаса по амплитуде μ и его значение вместе со значениями r0,A0 записывает с помощью вычислительного устройства 4 в память микроконтроллера 7 пульта 3.
Далее оператор 1 с помощью вычислительного устройства 4 загружает в память микроконтроллеров 6 и 7 квадрокоптера 2 и пульта 3 программы, синхронизирующие работу их приемно-передающих устройств 8 и 9, и обеспечивающие передачу временных расчетных интервалов и текущего минимального значения А по принципу обратной связи. В памяти микроконтроллера 6 квадрокоптера 2 оператор 1 дополнительно сохраняет подпрограмму перезадания всего ансамбля амплитуд для случая амплитудной модуляции. Далее оператор 1 подключает вход аналогово-цифрового преобразователя микроконтроллера 7 пульта 3 к тракту его приемно-передающего устройства 9 в его приемной части после полосового фильтра но перед демодулятором.
Затем оператор 1 с помощью пульта дистанционного управления 3 выводит квадрокоптер 2 в нужную точку пространства и с помощью датчика видеоизображений 12 осуществляет панорамную видеосъемку местности в течение наперед заданного интервала времени, не превышающего время полной разрядки аккумуляторной батареи квадрокоптера 2. При этом оператор 1 корректирует положение квадрокоптера 2 с помощью встроенного в пульт 3 дисплея 13, подавая управляющие радиосигналы на двигательную систему 14 квадрокоптера 2. По окончании видеосъемки оператор 1 с помощью пульта 3 приземляет квадрокоптер 2, после чего выключает питание всех устройств.
Возможность получения при осуществлении изобретения заявленного технического результата и наличие причинно-следственной связи между совокупностью существенных признаков заявляемого объекта и достигаемым техническим эффектом подтверждается результатами математического моделирования процесса распространения и приема радиосигнала с амплитудной и частотной модуляцией в процессе передачи бинарных кодов видеоизображений.
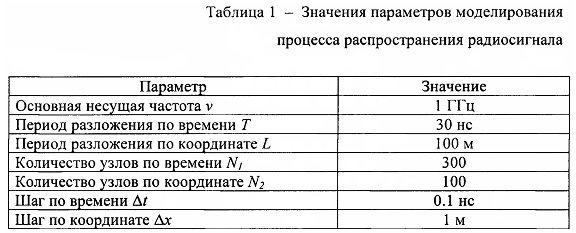
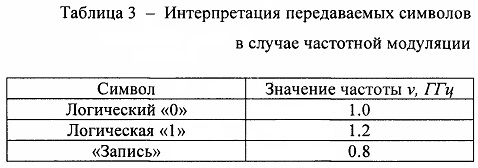
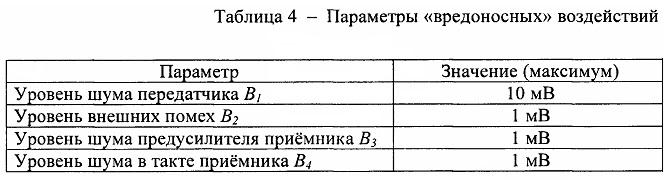
Общие параметры моделирования представлены в таблице 1. В таблицах 2 и 3 дана смысловая интерпретация значений амплитуд и частот для амплитудной и частотной цифровой модуляции соответственно. В обоих случаях передается одна и та же логическая последовательность из трех информационных символов вида «1», «0», «1», каждый из которых сопровождается неинформационным символом записи. Таблица 4 содержит сведения о максимальных уровнях собственных шумов приемно-передающих устройств и внешних помех радиоканала.
На ФИГ. 4 - ФИГ. 12 представлены результаты моделирования. Для функции u2(t,x) на двумерных графиках используется понятие эквивалент напряжения распространения, поскольку некорректно говорить о «напряжении электромагнитного поля». Под эквивалентом напряжения распространения понимается то значение напряжения, которое возникло бы на приемной антенне при ее размещении «в точке» с заданной координатой х. При этом геометрическими размерами антенн пренебрегаем. Графики напряжения в отдельной точке в представленном случае соответствуют расчетному расстоянию 25 м.
Сам принцип стабилизации отношения, сигнал-шум можно пояснить с помощью ФИГ. 13, ФИГ. 14, где пунктирными линиями обозначены предыдущие значения амплитуд. По смыслу эти графики можно интерпретировать следующим образом: «качество изображения улучшилось по сравнению с базовым расчетным уровнем, поэтому амплитуду несущего сигнала можно снизить».
Аналогично, при ухудшении качества изображения амплитуда сигнала автоматически увеличивается. Таким образом, отношение сигнал-шум r в тракте приемного устройства пульта постоянно «притягивается» к базовому значению r0.
Понятно, что это отношение r не может быть постоянным, но благодаря стабилизации, его значение удается выдерживать в диапазоне примерно ±5% от базового значения r0 с учетом коэффициента поправки μ. При отсутствии подобной обратной связи (как в прототипном способе) отношение сигнал-шум может меняться в несколько раз, что делает качество передаваемых изображений нестабильным.
Повышение точности предварительной расчетной оценки минимально необходимого значения амплитуды А0, в свою очередь, обеспечивается за счет учета свойств среды (на основе коэффициентов уравнения в частных производных), учета собственных шумов аппаратуры и внешних помех радиоканала, а также за счет учета конструкции входного тракта приемного устройства пульта. Повышение точности оценки А0 может варьироваться от нескольких процентов до нескольких десятков процентов (в зависимости от указанных факторов).
Высокая точность оценки А0 необходима, чтобы не «перегружать» квадрокоптер массивным передатчиком и увеличивать время разрядки аккумулятора, а следовательно, и время активного полета. Прочие пояснения, раскрывающие сущность изобретения более детально, представлены ниже:
- для передачи видеоизображений по беспроводному радиоэлектронному каналу связи используется схема с парой приемно-передающих устройств квадрокоптера и пульта управления, работа которых синхронизирована и согласована во времени на программно-аппаратном уровне;
- «механизм» обратной связи по амплитуде сигнала передачи изображений работает «напрямую» с отношением сигнал-шум в тракте пульта, но косвенно учитывает два фактора: расстояние между антеннами квадрокоптера и пульта управления, а также уровень внешних помех радиоканала (поскольку отношение сигнал-шум зависит от каждого из них);
- предложенный способ подходит как для амплитудной цифровой модуляции, так и для частотной цифровой модуляции с разницей в том, что в случае частотной модуляции корректируется единственное значение амплитуды сигнала изображений (поскольку меняется частота), а в случае амплитудной модуляции корректируется весь ансамбль амплитуд;
- используется четыре основных типа «вредоносных» воздействий: собственный шум передатчика e1(t), внешние помехи e2(t) (берутся в расчетной точке с координатой ), собственный шум предусилителя приемника е3(t), расположенного на входе перед полосовым фильтром (учитывается при наличии в реальной схеме), а также собственный шум первого после фильтра каскада усиления приемного устройства пульта e4(t), при этом все они описываются случайными функциями, но вовлекаются в общую математическую модель по-разному;
- собственный шум передатчика квадрокоптера e1(t) вовлекается в правую часть уравнения в частных производных изначально (поскольку уже содержится в общем сигнале передающей антенны вместе с полезным сигналом);
- внешние помехи e2(t) «накладываются» (добавляются) после получения решения уравнения и по принципу суперпозиции в расчетной точке приема (поскольку речь идет уже не о напряжении, а об электромагнитном распространении сигнала);
- собственный шум предусилителя приемника пульта е3(t) учитывается вместе с внешними помехами, но в отличие от них не «попадает» под общий коэффициент усиления предусилителя (кроме того, предусилитель может отсутствовать);
- собственный шум первого каскада после фильтра приемника пульта e4(t) учитывается после прохождения сигналом, полосового фильтра и ассоциируется по смыслу с шумом всех каскадов между фильтром и демодулятором (поскольку каждый последующий усилитель тракта приемника в реальной схеме вносит много меньший вклад, чем предыдущий);
- уровни собственных шумов e1(t),e3(t),e4(t) оцениваются единожды путем замера их уровня в передающем устройстве квадрокоптера и приемном устройстве пульта и в реальном времени больше не «мониторятся» (поскольку сильно не меняются). Тем не менее, уровни этих шумов учитываются, так как косвенно влияют на расчетное (базовое) значение минимальной амплитуды A0 (от которого в дальнейшем ведется экстраполяция текущего значения А);
- уровень внешних помех e2(t), напротив, учитывается в режиме реального времени при корректировке текущего значения А, поскольку может сильно меняться во времени (при изменении уровня внешних помех меняется измеряемое в режиме реального времени отношение сигнал-шум в тракте пульта, а исходя из него корректируется текущее значение А, передаваемое квадрокоптеру);
- аналогичным образом автоматически корректируется значение А и в зависимости от расстояния между антеннами, но здесь изменение расстояния влияет уже не на уровень помех в отношении сигнал-шум, а на уровень сигнала в нем (с увеличением расстояния сигнал ослабевает);
- при оценке отношения сигнал-шум используется обычная шкала (не в децибелах), при этом сигнал и шум оцениваются не по мощности, а по напряжению, а в модели и реальном устройстве для оценки используются одинаковые расчетные формулы на основе отношения средних арифметических для квадратов напряжений выборок сигнала и шума;
- для того, чтобы разрядности ДЦП в 8-10 разрядов уже хватало для объективной оценки отношения сигнал-шум в широком диапазоне значений, при подсчете этого отношения используется не исходный сигнал изображений на антенне пульта, а усиленный сигнал в тракте приемного устройства;
- там действует схема автоматической регулировки усиления, но она не может быть «идеальной», в связи с чем усиленный эталонный сигнал (в течение первого расчетного временного интервала) и усиленный шум (в течение второго расчетного временного интервала) все равно будут иметь какой-то разброс по уровню в зависимости от расстояния и величины помех (то есть, здесь речь идет о динамическом диапазоне схемы АРУ на выходе, а он обычно составляет от 2 до 6 дБ);
- с точки зрения скорости АЦП, сигнал может иметь достаточно высокое значение несущей частоты, поэтому при оценке отношения сигнал-шум используется не принцип поиска максимума в выборке, а работа со средними выборочными;
- основным достоинством предложенного способа является возможность задания произвольного характера изменения полезного сигнала и учет сразу всех возможных «вредоносных» компонентов: собственных шумов передатчика и приемника изображений e1(t),e3(t),e4(t), а также внешних помех радиоканала e2(t);
- при этом особо подчеркнем учет компонента собственного шума передатчика e1(t), который входит в состав возмущения в правой части уравнения в частных производных, использованного для максимально точного моделирования распространения радиосигнала;
- дело в том, что обычно этот шум не берется в расчет, потому, что на больших расстояниях, будучи ослабленным, вносит слишком малый вклад в общее отношение сигнал-шум, однако на небольших расстояниях, присущих системам с квадрокоптерами, учет е1(t) может сыграть определяющую роль с точки зрения предварительной оценки базового значения отношения сигнал-шум;
- так, при достаточно больших значениях амплитуды полезного сигнала (в 10 и более Вольт) и на коротких расстояниях (в несколько десятков или сотен метров), присущих применению квадрокоптеров, уровень собственного шума передатчика e1(t) может значительно превышать общий фон помех е2(t) в точке приема, и в этом случае его необходимо учитывать в первую очередь;
- в этой связи, использованное уравнение в частных производных позволяет достаточно точно моделировать, распространение затухающего радиосигнала с цифровой модуляцией (амплитудной или частотной) и в итоге получать расчетное значение минимально необходимой амплитуды полезного сигнала А0;
- использование схемы линейной экстраполяции амплитуды А и введение базовых значений r0,А0, отмеченных нулевыми индексами, обусловлено тем, что микроконтроллер квадрокоптера в паузах между передачами изображений не успеет в режиме реального времени проводить моделирование на основе уравнения в частных производных, (это нужно делать заранее с помощью персонального компьютера или ноутбука);
- переход именно к комплексному уравнению в частных производных потребовался вследствие того, что в поле действительных чисел при указанном составе слагаемых использованное уравнение в частных производных решить по методу Фурье не удалось (то есть нужно было либо сократить количество слагаемых, либо переходить в поле комплексных чисел);
- кроме того, комплексная модель допускает использование полезных сигналов произвольной формы (а не только четных или только нечетных как в аналогичной действительной модели), это особенно важно для сигналов с частотной цифровой модуляцией и аппроксимации собственных шумов передатчика изображений;
- как следствие, функции u1(t,x), u2(t,x), изначально представляются комплексными, но для задания воздействий вначале и извлечения принятого сигнала в конце используются действительные части указанных функций;
- в случае амплитудной модуляции использовалась одна модель полосового фильтра, настроенная на резонансную частоту 1 ГГц (ее амплитудно-частотная характеристика показана на ФИГ. 15), в случае частотной модуляции использовались три, аналогичных фильтра с резонансными частотами 0.8 ГГц, 1 ГГц и 1.2 ГГц соответственно;
- модели всех полосовых фильтров были построены на основе одномерного преобразования Фурье с уменьшением (искусственным подавлением) амплитуд гармоник, отличных от резонансной;
- в результате применения каждого из фильтров разница отношения сигнал-шум в модели между входом (перед фильтром) и трактом приемного устройства пульта (после фильтра) выдерживалась примерно равной 45 дБ;
- к достоинствам предложенного способа можно также отнести то, что для его реализации на практике не требуется вводить дополнительных устройств и печатных плат, то есть массово-габаритные показатели квадрокоптера вместе с оборудованием остаются прежними;
- в свою очередь к недостаткам способа следует отнести недостаточно хорошую сходимость рядов Фурье (ФИГ. 16), которая может проявиться в виде выбросов в местах резких изменений параметров сигнала (амплитуды или частоты) при малых значениях амплитуды полезного сигнала на значительных расчетных расстояниях;
- обусловлено это тем, что в дальней зоне при слабом сигнале начинает сильно сказываться приближенный характер разложения функции возмущения и искомой функции (особенно при малом количестве коэффициентов разложения), то есть решение разрушается вследствие сложных графиков модулированных, сигналов и недостаточно хорошей сходимости рядов Фурье;
- чтобы избавиться от этого недостатка, можно повышать степень дискретизации решения (то есть наращивать количество узлов дискретной решетки) и увеличивать количество коэффициентов разложения Фурье, но в этом случае моделирование может потребовать слишком много машинного времени (даже для современного персонального компьютера это время может доходить до нескольких десятков минут).
Дадим также краткое пояснение к решению исходного комплексного уравнения в частных производных. Перепишем исходное уравнение:

Перепишем разложения возмущающей и искомой функции:
Теперь, для простоты зафиксируем одну гармонику с коэффициентом под номером k и, используя введенное разложение, запишем уравнения для частных производных искомой функции, фигурирующих в исходном уравнении:

где штрихами обозначены производные по координате х.
Подстановка последних выражений производных искомой функции u2(t,x) вместе с разложениями u1(t,x), u2(t,x) в исходное уравнение с частными производными приводит для одного коэффициента разложения к обыкновенному дифференциальному уравнению:

с коэффициентами:

Если заменить производные в этом уравнении разностными отношениями и выразить текущее значение c2,k,n, то получаем общую расчетную формулу вида:

и здесь, учитывая, что мнимые части коэффициентов q1,q2,q3,q4,q5 равны нулю изначально, для отдельно взятого коэффициента с2,k,n с индексом k возможны два варианта.
В первом (частном) случае действительная часть коэффициента q3 равна нулю и, следовательно, равны нулю мнимые части сразу всех коэффициентов р1,k,р2,k,р3,k, в том числе, равна нулю и мнимая часть р3,k. Здесь можно сразу по очереди вычислять значения действительной и мнимой части с2,k,n, поэтому получаем более простую расчетную зависимость, указанную в зависимом пункте формулы изобретения.
Во втором (общем) случае действительная часть коэффициента q3 не равна нулю и, следовательно, коэффициент p3,k в знаменателе дроби имеет ненулевую мнимую часть. Здесь сразу вычислять значения действительной и мнимой части с2,k,n нельзя, а следует сначала обособить действительную и мнимую части знаменателя формулы, домножив и числитель, и знаменатель дроби на число, комплексно сопряженное знаменателю. Отсюда возникает более сложное общее решение с параметрами h1,h2,h3,h4, указанное в основной части формулы изобретения.
Технико-экономическое обоснование заявляемого способа и его практическая ценность состоят в том, что в прикладных задачах, связанных со статистической обработкой аэровидеоизображений (например, анализ автотранспортных потоков мегаполисов или анализ распространения очагов возгораний лесных массивов), он позволяет получать ряд изображений, почти одинаковых по качеству (это достигается удержанием текущего отношения сигнал-шум r в диапазоне ±5% от расчетного r0 с учетом коэффициента поправки μ). Следовательно, на достоверность получаемых по изображениям статистических данных почти никак не влияет ни изменяющееся расстояние видеосъемки, ни уровень внешних помех.
В результате имеется возможность достоверно установить закономерности между исследуемыми параметрами (например, подсчитать количество проекций автомобилей «в кадре», оценить по изображениям направление и скорость распространения, пожара, найти все очаги возгорания).
Таким образом, «стабилизация качества изображений» в указанных прикладных направлениях является задачей первостепенной важности. Причем это справедливо как на этапе исследований, так и на этапе построения реальных измерительных систем с целью организации систем оперативного пожаротушения и эффективного перераспределения транспортных потоков с целью минимизации количества транспортных заторов.
Крайне важно также обеспечить должную, точность предварительной оценки базового (опорного) отношения сигнал-шум, чтобы уже на этапе предварительного расчета изначально не получить высокой погрешности в последующей оценке (в предложенном способе начальная точность расчета отношения сигнал-шум обеспечивается за счет моделирования решения уравнения в частных производных).
Точная, оперативная и достоверная оценка статистических сведений по аэровидеоизображениям, в свою очередь, в случае мониторинга пожарной обстановки позволит сохранить значительную часть природных ресурсов, а в случае автотранспортных потоков благоприятно повлияет на развитие инфраструктуры города в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки отношения сигнал-шум на входе приёмного устройства для радиосигнала с цифровой амплитудной модуляцией | 2018 |
|
RU2695953C1 |
| СПОСОБ КОМПЕНСАЦИИ ДВИЖЕНИЯ В ЦИФРОВЫХ ДИНАМИЧЕСКИХ ВИДЕОИЗОБРАЖЕНИЯХ | 2013 |
|
RU2552139C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
| Способ кодирования-декодирования цифровых видеоизображений | 2016 |
|
RU2616176C1 |
| СПОСОБ КОМПЕНСАЦИИ ДВИЖЕНИЯ В ЦИФРОВЫХ ДИНАМИЧЕСКИХ СТЕРЕОВИДЕОИЗОБРАЖЕНИЯХ | 2013 |
|
RU2550544C1 |
| Способ создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов | 2023 |
|
RU2821856C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В МНОГОКАНАЛЬНЫХ РТЛС И РЛС | 2007 |
|
RU2368917C1 |
| Устройство пространственной селекции сигналов с компенсацией преднамеренных помех | 2018 |
|
RU2677931C1 |
| ПАНОРАМНЫЙ АСИНХРОННЫЙ РАДИОПРИЕМНИК | 2008 |
|
RU2380717C1 |
Изобретение относится к области вычислительной техники. Технический результат заключается в сохранении качества передаваемых изображений в условиях меняющегося расстояния передачи и нестабильного уровня внешних помех. Способ беспроводной передачи цифровых панорамных аэровидеоизображений заключается в том, что в квадрокоптере, имеющем беспроводное приемно-передающее устройство с микроконтроллером, радиоантенной и датчиком цифровых видеоизображений, в каждой временной паузе между передачей изображений, минимальное ненулевое значение амплитуды полезного сигнала, несущего информацию изображений, переустанавливают микроконтроллером квадрокоптера в режиме реального времени, при этом очередное расчетное значение предварительно пересчитывают микроконтроллером пульта управления и передают микроконтроллеру квадрокоптера посредством радиосигнала по принципу обратной связи. 1 з.п. ф-лы, 16 ил., 4 табл.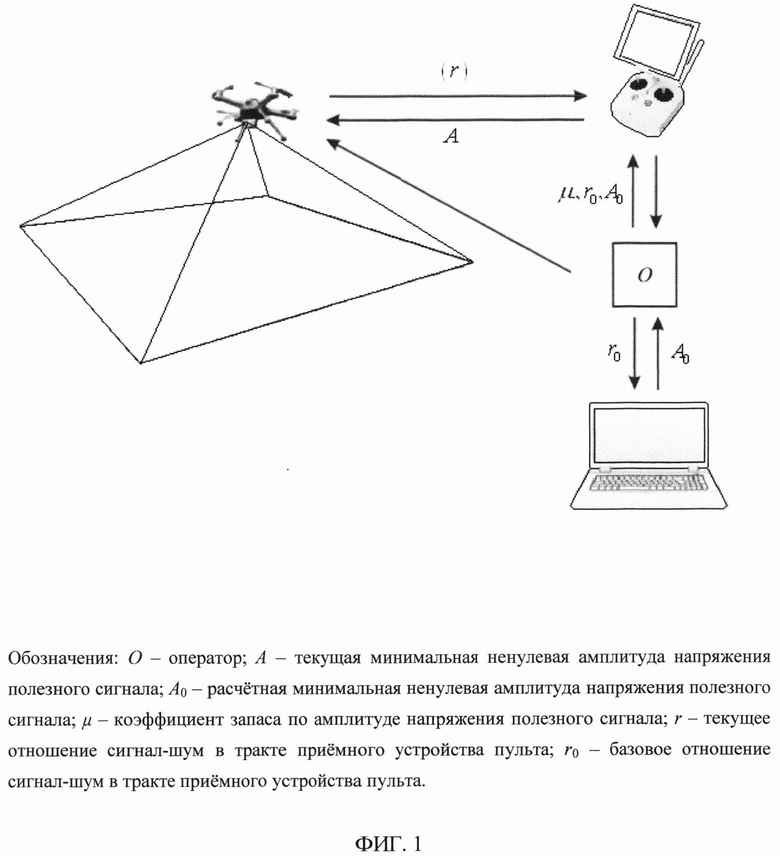
1. Способ беспроводной передачи цифровых панорамных аэровидеоизображений, заключающийся в том, что в квадрокоптере, имеющем беспроводное приемно-передающее устройство с микроконтроллером, радиоантенной и датчиком цифровых видеоизображений, в каждой временной паузе между передачей изображений, минимальное ненулевое значение амплитуды полезного сигнала, несущего информацию изображений, переустанавливают микроконтроллером квадрокоптера в режиме реального времени согласно формуле
А - текущая минимальная ненулевая амплитуда напряжения полезного сигнала;
А0 - расчетная минимальная ненулевая амплитуда напряжения полезного сигнала;
μ - коэффициент запаса по амплитуде напряжения полезного сигнала;
r - текущее отношение сигнал-шум в тракте приемного устройства пульта;
r0 - расчетное отношение сигнал-шум в тракте приемного устройства пульта;
при этом очередное расчетное значение А предварительно пересчитывают микроконтроллером пульта управления и передают микроконтроллеру квадрокоптера посредством радиосигнала по принципу обратной связи, в случае амплитудной модуляции уровни амплитуд всего ансамбля сигналов пропорционально пересчитывают сразу после получения текущего значения А и с тем же процентным изменением относительно предыдущих уровней, которое претерпела величина А, работу приемно-передающих устройств квадрокоптера и пульта управления синхронизируют во времени предварительно на программно-аппаратном уровне, все параметры расчетной формулы для А задают действительными числами, значения параметров r0, А0, μ подбирают и сохраняют в памяти микроконтроллера пульта управления перед использованием квадрокоптера, значения параметров r, А пересчитывают в режиме реального времени в каждой временной паузе между передачей изображений, минимум и максимум А задают предварительно в зависимости от максимальной дальности передачи сигнала и мощности передающего устройства квадрокоптера, в том случае, если после очередного перерасчета значение А оказывается меньше своего допустимого минимума, то используют минимум А, в том случае, если после очередного перерасчета значение А превышает свой максимум, то используют максимум А, коэффициент запаса по амплитуде μ задают предварительно положительным числом, большим единицы, с учетом диаграмм направленности антенн и сохраняют в памяти микроконтроллера квадрокоптера перед использованием квадрокоптера, расчетное значение отношения сигнал-шум r0 в тракте приемного устройства пульта задают предварительно, текущее отношение сигнал-шум r оценивают по дискретным числовым выборкам, которые получают в тракте приемного устройства после полосового фильтра и одного или нескольких каскадов усиления, но перед блоком демодуляции сигнала, номер последнего учитываемого каскада усиления выбирают предварительно, для оценки r в каждом временном промежутке между передачей изображений используют два расчетных временных интервала длительностью по 1 мс, расположенных на временной оси непосредственно друг за другом, в течение первого расчетного временного интервала с помощью микроконтроллера квадрокоптера на центральной несущей частоте передают по радиоканалу изображений эталонный синусоидальный сигнал с постоянным значением амплитуды, равной текущему значению А, в течение второго расчетного временного интервала амплитуду полезного сигнала выдерживают микроконтроллером квадрокоптера нулевой, о начале каждого из интервалов сигнализируют микроконтроллеру пульта по этому же радиоканалу отдельно посредством передачи уникальных битовых комбинаций, вид которых выбирают предварительно, в течение первого временного интервала с помощью аналогово-цифрового преобразователя микроконтроллера пульта получают и сохраняют выборку сигнала, в течение второго временного интервала с помощью аналогово-цифрового преобразователя микроконтроллера пульта получают и сохраняют выборку шума, запись выборок начинают сразу после получения соответствующих сигналов о начале временных расчетных интервалов, количества элементов каждой из выборок устанавливают одинаковыми и не меньшими 50 чисел, после этого на основе полученных выборок рассчитывают текущее отношение сигнал-шум r как отношение средних арифметических для квадратов напряжений выборок сигнала и шума, расчетное значение амплитуды А0 полезного сигнала подбирают предварительно с помощью высокопроизводительного вычислительного устройства, при оценке значения А0 используют прямоугольную декартову систему координат с осями времени t и координаты х, начало системы координат совмещают с фазовым центром антенны квадрокоптера, ось х направляют таким образом, чтобы она проходила через фазовый центр антенны пульта управления, оценку значения величины А0 проводят путем подбора и с помощью многократного нахождения приближенного решения комплексного уравнения в частных производных второго порядка вида
u1(t,x) - функция внешних возмущений;
u2(t,x) - искомая функция, эквивалент напряжения распространения;
q1, q2, q3, q4, q5 - коэффициенты, учитывающие свойства среды;
m - индекс коэффициентов уравнения с частными производными;
Im qm - мнимая часть m-го коэффициента;
t - время;
x - координата;
T - максимальное значение времени;
L - максимальное значение координаты;
N - множество натуральных чисел;
R - множество действительных чисел;
С - множество комплексных чисел;
с краевыми и начальными условиями
данное уравнение решают с помощью вычислительного устройства, все двумерные действительные параметры математической модели на основе записанного уравнения и двумерные части комплексных функций в памяти вычислительного устройства представляют числовыми матрицами, а все одномерные действительные параметры и одномерные части комплексных параметров задают одномерными числовыми массивами, за счет подбора значений действительных частей комплексных коэффициентов q1, q2, q3, q4, q5 учитывают свойства среды распространения радиосигнала, при этом в зависимости от свойств среды коэффициенты q1, q2, q3, q4, q5 задают постоянными или переменными по одному или обоим аргументам t и х, далее для действительных и мнимых частей функций u1(t,x), u2(t,x) вводят двумерную дискретную решетку, количество узлов решетки и размер постоянных приращений по времени t и координате х подбирают предварительно в зависимости от максимального значения несущей частоты полезного сигнала и максимального расстояния его передачи, возмущающие воздействия располагают в действительной части функции u1(t,x), которую в начале координат ассоциируют с антенной квадрокоптера и задают с помощью формулы

Re u1(t,0) - действительная часть u1(t,0);
Im u1(t,0) - мнимая часть u1(t,0);
s(t) - полезный сигнал для передачи изображений;
e1(t) - собственный шум передающего устройства квадрокоптера;
k1 - коэффициент поправки сигнала в ближней зоне;
в остальной части области определения и действительную, и мнимую составляющие u1(t,x) задают нулевыми значениями, после этого для согласования краевых и начальных условий значения u1(0,0) и u1(Т,0) обнуляют, за счет коэффициента пропорциональности k1 корректируют уровень полезного сигнала в ближней зоне, значение k1 подбирают предварительно и задают положительным числом, функцию s(t) задают эталонным фрагментом полезного сигнала с амплитудной или частотной цифровой модуляцией, в котором в случае амплитудной модуляции размещают как минимум один временной отрезок с минимальной ненулевой амплитудой сигнала, эталонный фрагмент сигнала подготавливают заранее и сохраняют в памяти вычислительного устройства, массив для e1(t) формируют генератором случайных чисел вычислительного устройства, при этом максимальный уровень e1(t) оценивают предварительно путем измерения максимального уровня напряжения собственного шума передающего устройства квадрокоптера при отсутствии полезного сигнала s(t), замер производят в последнем каскаде усиления перед антенным устройством, уравнение в частных производных решают на основе метода Фурье с разложением функций u1(t,х) и u2(t,x) по временному базису с несколькими гармониками
c1,k(х) - k-й коэффициент разложения Фурье функции u1(t,x);
c2,k(x) - коэффициент разложения Фурье функции u2(t,x);
i - мнимая единица;
π - константа, равная 3.14;
k - индекс коэффициентов разложения Фурье;
K - количество коэффициентов разложения Фурье;
Z - множество целых чисел;
причем количество коэффициентов разложения K задают предварительно числом большим или равным одной четвертой от количества узлов дискретной решетки по оси времени t и меньшим или равным этому количеству, далее, согласно записанным формулам разложения, находят выражения для комплексных частных производных u2(t,x), подставляют их вместе с разложениями u2(t,x) и u1(t,x) в исходное уравнение в частных производных, приводят подобные слагаемые и получают множество комплексных обыкновенных дифференциальных уравнений второго порядка вида
p1,k, p2,k, p3,k - комплексные коэффициенты обыкновенного дифференциального уравнения для k-го коэффициента c2,k(x);
после этого коэффициенты разложения с1,k(х) функции внешних возмущений u1(t,x) в правых частях этих уравнений получают с помощью постолбцового одномерного прямого комплексного дискретного преобразования Фурье, применяемого к u1(t,x) в каждой координатной отметке поочередно, а значения р1,k, р2,k, р3,k задают с помощью формулы

причем в случае переменных коэффициентов q1, q2, q3, q4, q5 значения р1,k, р2,k, р3,k пересчитывают каждый раз, когда меняется значение хотя бы одного из коэффициентов q1, q2, q3, q4, q5, значения q1, q2, q3, q4, q5 задают предварительно таким образом, чтобы обеспечить устойчивость решения обыкновенного дифференциального уравнения при всех возможных сочетаниях q1, q2, q3, q4, q5, далее поочередно вычисляют коэффициенты разложения с2,k(х), при этом действительные и мнимые части c2,k(x) в первом координатном узле с учетом краевых условий сразу приравнивают соответствующим значениям с1,k(x), то есть

с2,k,1 - значение k-го коэффициента с2,k(х) в первом координатном узле;
с1,k,1 - значение k-го коэффициента с1,k(х) в первом координатном узле;
Re - обозначение действительных частей коэффициентов;
Im - обозначение мнимых частей коэффициентов;
в остальных координатных узлах, начина со второго, значения с2,k(х) находят по формуле

с2,k,n - значение k-го коэффициента с2,k(х) в n-м координатном узле;
n - индекс координатного узла;
h1, h2, h3, h4 - вспомогательные параметры;
Re - обозначение действительных частей коэффициентов;
Im - обозначение мнимых частей коэффициентов;
при вспомогательных обозначениях
с1,k,n - значения k-го коэффициента c1,k(x) в n-м координатном узле;
Δх - величина приращения (постоянный дискретный шаг) по оси х;
Re - обозначение действительных частей выражений в скобках;
Im - обозначение мнимых частей выражений в скобках;
после вычисления всех коэффициентов с2,k(х) возвращаются к разложению искомой функции и получают ее в комплексной форме путем постолбцового одномерного обратного комплексного дискретного преобразования Фурье, применяемого к u2(t,x) в каждой координатной отметке поочередно, эквивалент напряжения распространения извлекают из действительной части u2(t,x), далее учитывают собственные шумы предусилителя приемного устройства пульта управления и внешние помехи радиоканала согласно формуле
u3(t) - напряжение принятого информационного сигнала до фильтра;
 - действительная часть u2(t,x) на расчетном расстоянии;
- действительная часть u2(t,x) на расчетном расстоянии;
 - расчетное расстояние;
- расчетное расстояние;
k2 - коэффициент предусилителя приемного устройства пульта;
e2(t) - внешние помехи на расчетном расстоянии;
е3(t) - собственный шум предусилителя приемного устройства пульта;
при этом расчетное расстояние между антеннами в модели выбирают предварительно, массивы для e2(t) и е3(t) формируют генератором случайных чисел вычислительного устройства, максимальный уровень e2(t) принимают равным предполагаемому максимуму напряжения помех в точке приема, максимальный уровень е3(t) оценивают предварительно путем измерения максимального уровня напряжения собственного шума предусилителя приемного устройства пульта, расположенного на входе приемного устройства перед полосовым фильтром, и при условии наличия данного предусилителя перед измерением максимума е3(t) отключают на время передающее устройство квадрокоптера, значение k2 задают предварительно и равным коэффициенту усиления предусилителя устройства пульта, а в случае его отсутствия k2 приравнивают единице и массив для e3(t) заполняют нулевыми значениями, далее к u3(t) применяют модель полосового фильтра, характеристики которой подбирают предварительно и согласовывают с характеристиками реального полосового фильтра на входе приемного устройства пульта управления, при необходимости в случае частотной модуляции применяют параллельный каскад моделей полосовых фильтров, на выходе модели фильтра получают сигнал, далее сигнал домножают на общий коэффициент всех каскадов усиления k3 реального тракта приемного с вовлечением собственных шумов первого после фильтра каскада усиления согласно формуле
u5(t) - напряжение на выходе модели;
u4(t) - напряжение на выходе полосового фильтра в модели;
k3 - общий коэффициент усиления каскадов от фильтра до демодулятора;
e4(t) - собственный шум первого после фильтра каскада усиления;
массив для e4(t) формируют генератором случайных чисел вычислительного устройства, максимальный уровень e4(t) оценивают предварительно путем измерения максимального уровня напряжения собственного шума первого после полосового фильтра каскада усиления, перед измерением максимума e4(t) на время отключают передающее устройство квадрокоптера, при оценке k3 охватывают все каскады усиления, расположенные в тракте приемного устройства пульта от полосового фильтра до демодулятора, то есть до места предполагаемого подключения аналогово-цифрового преобразователя в реальной схеме, в результате усиления получают выходной сигнал модели u5(t), уравнение в частных производных решают при разных значениях А0 полезного сигнала до тех пор, пока значение отношения сигнал-шум для u5(t) в модели не войдет в требуемый диапазон
S - уровень сигнала на выходе модели;
Е - уровень шума на выходе модели;
оценку каждого очередного отношения сигнал-шум на выходе модели проводят на фрагменте эталонного сигнала с минимальным уровнем амплитуды, уровень сигнала S рассчитывают как среднее арифметическое для квадратов напряжений одномерной выборки u5(t) при отсутствии шумов и помех, то есть при нулевых e1(t), e2(t), e3(t), e4(t), уровень шума Е рассчитывают как среднее арифметическое для квадратов напряжений одномерной выборки u5(t) на выходе модели при отсутствии полезного сигнала, то есть при нулевом s(t).
2. Способ беспроводной передачи цифровых панорамных аэровидеоизображений по п. 1, отличающийся тем, что если в частном случае действительная часть коэффициента q3 равна нулю, то в ходе моделирования каждый из коэффициентов с2,k(x) в координатных узлах дискретной решетки рассчитывают по упрощенной формуле
с последовательным вычислением действительной и мнимой частей с2,k,n, при этом условие равенства действительной части q3 нулю проверяют до применения основной расчетной формулы с параметрами h1, h2, h3, h4.
| CN 102685467 A, 19.09.2012 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| EP 3086195 A1, 26.10.2016. | |||

