Изобретение относится к система автоматическогр контроля перемещений, а именно к устройствам для контроля многокомпонентных перемещений объекта.
Известно устройство для двухкомпонентных перемещений, содержащее магнитопровод с обмотками возбуждения и измерительными обмотками, расположенными во взаимно перпендикулярных плоскостях 11.
Недостатки этого устройства состоят в сложности его конструктивного решения и в невозможности контролировать перемещения по трем ортогональным осям координат.
Наиболее близким по своему техническому решению к предлагаемому является устройство для контроля многокомпонентных перемещений объектов, у которого преобразователь выполнен на двух сердечниках крестообразной формы с магнитной перемычкой, имеющей длину, равную высоте двух стержней и соединяющей центры сердечников, на стержнях которых размещены две группы по три встречно включенных измерительных катушек, причем измерительные оси преобразователя: У - совпадает с осью перемычки, а X, Z - параллельны- осям стержней сердечников и расположены на расстоянии ,15 t, +0,4, а от внешней грани стержней с опорными измерительными катушками, где ел ширина стержня, Ед, - длина магнитопровода 2.
Однако уменьшение зазора по одной из осей координат уменьшает собственную индуктивность токовой катушки. В случае питания токовой кат.ушки от генератора высокочастотног напряжения с малым выходным сопротивлением растет ее магнитодвижущая сила и увеличиваются значения наведенных ЭДС на измерительных катушках по другим осям координат, что определяет повышенные высоты стержней магнитопровода для снижения погрешностей от взаимного влияния компонент перемещений изделий.
Целью изобретения является повышение точности устройства за счет уменьшения взаимного влияния компонента перемещений объекта на выхода ные сигналы устройства при контроле .трех линейных и двух: угловых взаимных перемещений двух объектов сложной формы по тремортогональным осям координат. ,
Поставленная цель достигается тем, что в устройство для контроля многокомпонентных перемещений объек та, содержащее два крестообразных магнитопровода, соединенных межЯу собой магнитопроводящей перемычкой, на которой расположена обмотка возбуждения подключенная к генератору
высокочастотного напряжения, распооженные соосно с магнитопроводящей перемычкой стержневые магнитопровоы, на которых размещены встречно соединенные секции измерительной обмотки, подключенной к входу первого усилителя, секции первой опорной обмотки, расположенные соответственно на первом и втором стержнях крестообразного магнитопровода, соединены последова-Гельно встречно и подключены к входу второго усилителя, выход которого соединен с опорным входом третьего усилителя, один конец опорной-обмотки, расположенной на первом стержне второго крестообразного магнитопровода, подключен к сигнальному входу третьего усилителя, другой конец второй опорной обмотки соединен с точкой соединения секций первой опорной бмотки, секции третьей опорной обмотки, расположенные соответственно на третьем и четвертом стержнях крестообразного магнитопровода, соединены последовательно-встречно и подключена к входу четвертого усилителя, выход которого соединен с опорным входом пятого усилителя, один конец четвертой опорной обмотки, расположенной на втором стержне второго крестообразного магнитопровода, подключен к сигнальному входу пятого . усилителя, другой конец четвертой опорной обмотки соединен с точкой соединения секций третьей опорной обмотки, стержневые магнитопроводы выполнены высотой Ъ , равной 1/6 , где Р - длина магнитопроводящей пере1 «лчки, выход первого усилителя соединен с управляклпими входами . третьего и пятого усилителей.
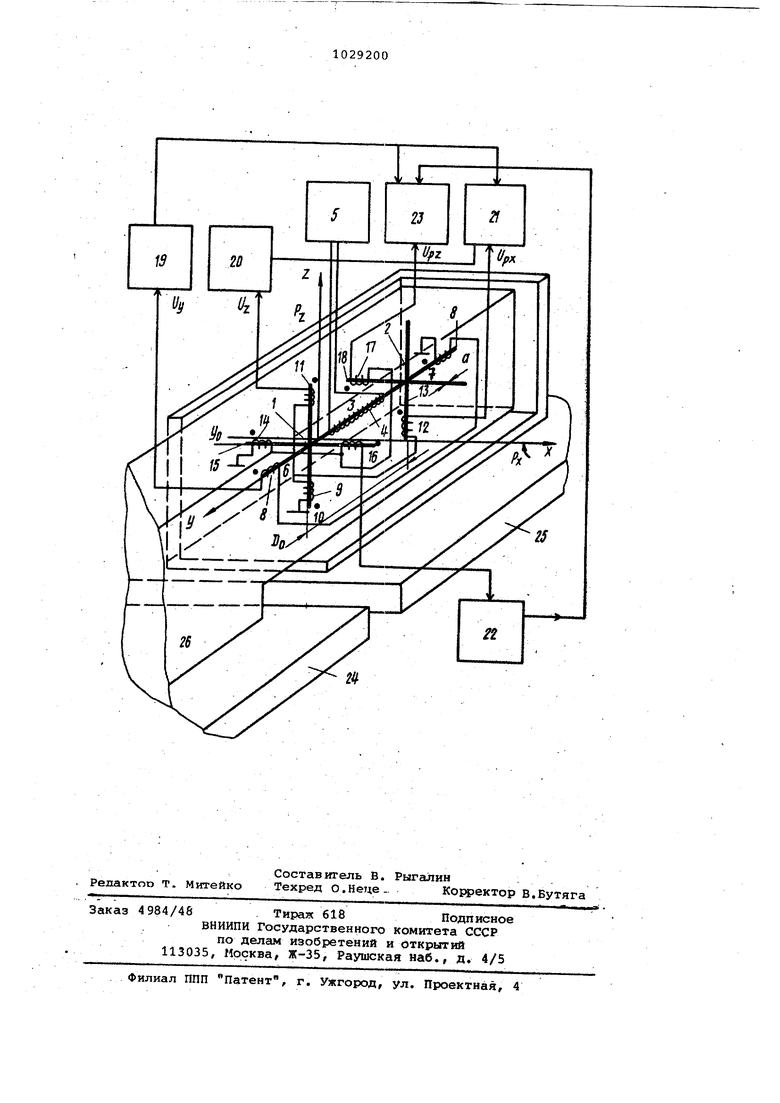
На чертеже показано схематич- л ноеизображение устройства для контроля многокомпонентных перемещений объекта.
Устройство для контроля многокомпонентных перемещений объекта содержит два крестообразных магнитопровода 1 и 2, магнитопроводящую перемычку 3 с обмоткой 4 возбуждения, генератор 5 высокочастотного напряжения, стержневые магнитопроводы 6 и 7, секции измерительной обмотки 8, секции первой опорной . обмотки 9, расположенные на первом и втором стержнях 10 и 11 магнитопровода 1, вторую опорную обмотку 12, расположенную на первом стержне 13 магнитопровода 2, секции третьей опорной обмотки 14, расположенные на третьем и четвертом 15 и 16 стержнях магнитопровода 1, четвертуй опорную обмотку 17, расположенную на втором стержне 18 магнитопровода 2, первый, второй, третий, четвертый и пятый усилители 19, 20, 21, 22 и 23. Кроме того, на чертеже показаны объекты 24 и 25 и диэлектрическая оправка 26. Устройство работает следующим образом. Крестообразные магнитопроводы 1 и 2 совместно с перемычкой 3 представляет собой две ортогональные |Н-образные магнитные цепи с токовой обмоткой 4 возбуждения, расположенн на общей перемычке 3. Использование |Трех встречно включенных измеритель ных.катушек, симметрично размещенны на стержнях Н-образной магнитной цепи, позволяет одновременно опреде лять величины зазора и перекоса контролируемой поверхности. Влияние угловых перемещений на сигналы линейных перемещений устраняется выбо ром положения измерительных осей. Для устранения влияния перемещений по оси Z на сигналы поворота PJJ вокруг оси X используется усилитель 21 с регулируе1«ым напряжением 0 коэффициентом усиления. Аналогично сигнгш PJ корректируется регулируемым Ц усилителем 23. Умень1чение высоты бо.ковых стержней приводит к значительным измене ниям индуктивности катушек при вари ации зазора по любой из осей коор1динат. Так как ток Э„ обмотки 4 возбуждения равен , где Up - питагадее напряжение, Zgj, выходное сопротивление генератора 5, Z - сопротивление обмотки 4, Zg, - вносимое сопротивление в обмотку 4, то 5р, растет с уменвшением зазора. Вследствие увеличения магнитодвижущей силы F f обмотки 4 растут наведенные ЭДС на измерител ных и опорных обмотках, контролирующих перемещения по другим осям координат, что определяет значител ные погрешности от взаимного влияния компонент перемещений. При изм нении зазора по оси Z от О до « соотношениясопротивлений Z.,. Bb нератора 5 и Z. обмотки 4 влияют на предельные нор 1ированные вносимые напряжения К- устройства, а также на величину питающего напряжения генератора 5. Наиболее рациональным является режим Zebjx lOZ, когда рост Р компенсирует ослабление и„ . При Изменении зазора.вдоль оси Z от О до су , исключается взаимное влияние компонент перемещений на выходные сигналы линейных перемещений устройства. Продольные перемещения вдоль оси У не влияют, на ЭДС, наводимле в секциях обмоток 9, 14, измерения линейных перемещений устройства. Уменьшение зазора вдоль оси У между устройством и поверхностью объекта приводит при указанном условии к незначительному уменьшвнию ЭДС в обмотках 12 и 17 относительно ЭДС соответствующих секциях обмоток 9 и 14. Поэтому необходима коррекция сигналов Up и Up напряжением . Uy , соответствующим зазору вдоль оси У, подаваемым на управлнюидае входы усилителей 21-и 23. Устройство может быть исполв-. и зовано и для контроля линейных и угловых деформаций изделий. Уменьшение веса и объема, определяемое уменьшением высоты боковых стенок магнитопровода с одновременным исключе1 ием взаимного влияния компонент перемещений на выходные сигналы преобразователя за счет выбора рационального соотношения между выходным сопротивлением генератора и сопротивлением обмотки возбуждения, а также дополнительной коррекции сигналов перекоса по сигналам перемещений вдоль оси У, позволяет сн,изить как влияние массы на исследуеMie вибрационные процессы в изделии, так и надежно контролировать объекты в скоростных газовых потоках. Экономический эффект от использо вания предлагаемого изобретения обусловлен отмеченными его техничеС кими преимуществами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля многокомпонентных перемещений | 1980 |
|
SU896657A1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ВАЛА | 1997 |
|
RU2145053C1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| Бесконтактный потенциометр Парфенова с элементами Холла | 1985 |
|
SU1267263A1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ДВУХ ВАЛОВ | 1991 |
|
RU2010156C1 |
| Индукционный толщиномер | 1990 |
|
SU1755036A1 |
| Датчик угловых перемещений | 1989 |
|
SU1620815A1 |
| Преобразователь перемещений | 1983 |
|
SU1193442A1 |
| Преобразователь электрическогоСигНАлА B углОВОЕ пЕРЕМЕщЕНиЕ | 1979 |
|
SU842902A1 |
| Датчик линейных перемещений | 1980 |
|
SU929995A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МНОГОКОМПОНЕНТНЫХ ПЕРЕЖЩЕНИЙ ОБЪЕКТА, содержащее два крестообразных магнитопровода, соединенных между собой магнитопроводящей neper мычкой, на которой расположена обмотка возбуждения, подключенная к генератору высокочастотного напряжения, расположенные соосно с мар:нктопроводящей перемычкой стержневые магнитопроводы, на которых размещены встречно соединенные секции Л измерительной обмотки, подключенной к входу первого усилителя, секций первой опорной обмотки, располо ен; Hfcie jcooTBeTCTBeHHo на первом и вто|ромстрежнях крестообразного магвито проврда,соединены последовательно встречно и подключены к входу второго усилителя,выход которого, соединен с опорным входом третьего усилителя, /один конец второй опорн й обмотки, рас :положенной на первом стеркне второго крестообразного магнитопровода, подключен к сигнальному входу треть: его усилителя, другой конец, второй . опорной обмотки соединен с точкой соединения секций первой опорной обмотки, секции третьей опорной об- мотки, расположенные соответственно ;На третьем и четвертом стержнях первого крестообразного магнитопро|вода, соединены последовательновстречно и подключены к входу четвертого усилителя, выход которого соединен с опорным входом пятого усилителя , один конец четвертой опорной (Л обмотки, расположенной на втором стержне.второго крестообразного магс нитопровода, подключен: к сигнальному входу пятого усилителя, другой конец четвертой опорной обмотки соёяин(ен § с точкой соединения секций третьей i опорной обмотки, о т ли ч а ю щт-е е с я тем; что, с целью повышения :точности устройства, в нем стержнеtsD вые магнитопровода выпблнены высоСО ts5 ;Той 4, равной 1/6 , где - длина :магнитопроводяс1ей пёрем:1чки, выход :первого усилителя соединен с управлякщими входами третьего и пятого усилятелей.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь линейных перемещений | 1974 |
|
SU522405A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля многокомпонентных перемещений | 1980 |
|
SU896657A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
