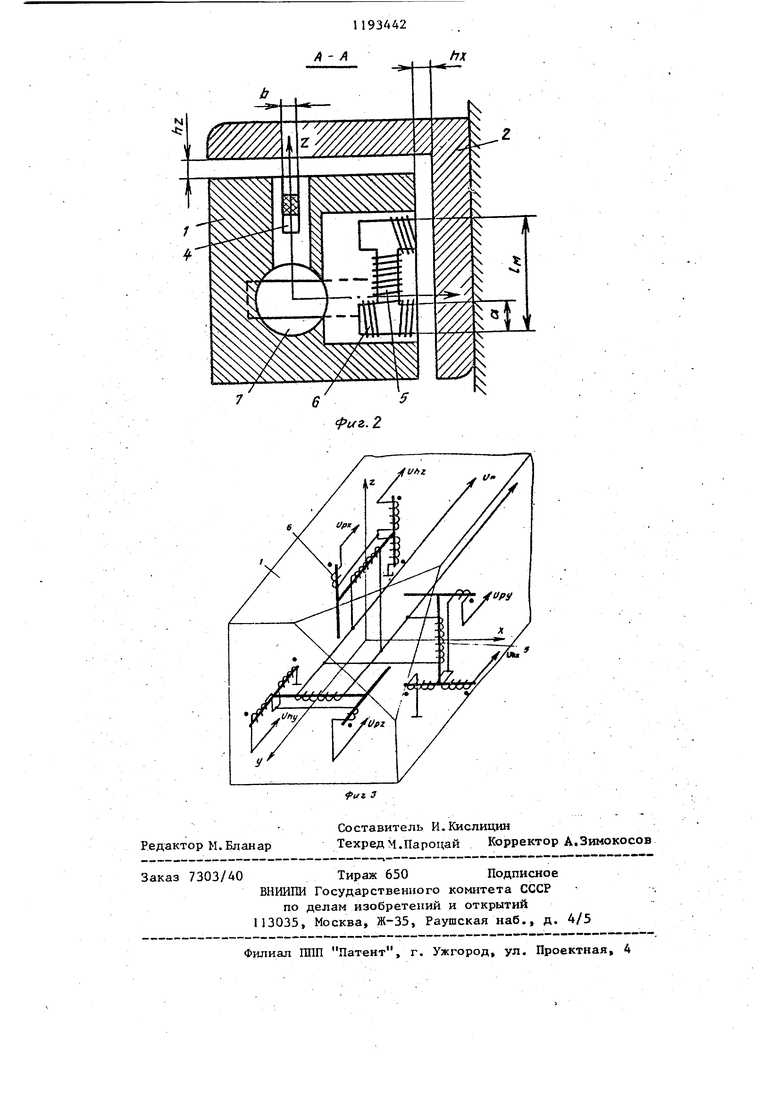
Изобретение относится к средствам электромагнитного контроля неэлектрических величин по сигналам, полученным от взаимодействия изделий сложной ( с электромагнитными полями, и может быть использовано для контроля в труднодоступных зонах взаимных перемещений двух объектов,имеющих шесть степеней свободы каждьгй. Цель изобретения - расширение функциональных возможностей преобразователя за счет контроля многокомпонентных перемещений в труднодоступных зонах. На фиг.1 изображен преобразователь перемещений, общий вид; на фиг,2 сечение А-А на фигЛ; на фиг.З - схема, соединения обмоток преобразователя , Преобразователь перемещений содержит корпус 1 из высокопроводящего материала в виде прямоугольного параллелепипеда квадратного сечения.. На рабочих гранях корпуса. выполне в которых размещены обмотрч i ,, иые y:iJU i 3, выполненные в виде П-образного saгнитoпpoвoдa с размещенньй-. на его перемычке обмоткой 4 возбугйдепия, а на плечах - измерительными обмотками 5. Сторона квадратиого сечения составляет ,8 2ц где 1, - предельный размер Н-образ lioi-o ;-сагч1итопровода вдоль его перемычки, глубина пазов 2 - 0,86, , .а обмоточные узлы 3 размещены в пазах 2 с зазором 0,2 Влл до их боковых стенок. Три обмотки 4 возбуждения соединены параллельно и предназначены для подключения к источнику высокочастотного напряжения, измерительные обмотки 5 соединены по три и через отверстие 6 подключены к соответствующим клеммам соедиыительного разъема, Ддя снижения MacOii преобразователя выполнен срез 7 вершины рабочих граней корпуса 1. Преобразователь перемещений ра.ботает следующим образом. Корпус. 1 закрепляют на одном из ;об7лектов (не показан и располагают с за-да п-1ым зазором безопасности внутри трехгранного прямоугольного ..опорного уголка 8 из того же материала, что и корпус 1, и заркепленного на втором объекте 9. Когда корпус 1 удаляют от опорного уголка 8, измерительные обмотки 5 обмоточных узлов 3 имеют равные наведенные ЭДС от поля обмоток 4 возбуждения. При этом все выходные сигналы Ujj , U , ,, Up, Up(., Up2 равны нулю (фиг.З. Установка корпуса 1 и опорного уголка 8 в рабочее положение на контролируемом изделии Гне показано) приводит к появлению постоянных составляющих выходных напряжений, характеризующих начальные зазоры и перекосы системы корпус 1 - опорный уголок 8 по трем осям координат. При запуске объекта многокомпонентные виброперемещения корпуса 1 20 относительно опорного уголка 8 свяэаны с взаимными перемещениями элементов контролируемого изделия и определяются по переменным составляющим выходных напряжений Uf, , U j, , Up, Upy, Up трех обмоточных узлов 3. Сигналы о линейных перемещениях не зависят от угловых перемещений указанной системы, а сигналы об угловых перемещениях корректируются по соответствующим сигналам линейных перемещений. При этом, для реализации системы отсчетных координат X, У, Z описываемого преобразователя выставляются точки на рабочих грсШях корпуса 1, соответствующие положению осевых линий перемычек Н-образных магнитопроводов и удаленные на расстояние с 1,1 6 jy от ребер рабочих граней корпуса 1. Использование высокопроводящего корпуса 1 с пазами 2 для размещения обмоточных узлов 3 на Н-образных магнитопровОдах и указанные соотнощения размеров позволяют обеспечить предельные миниатюризацию преобразователя, а таюке высокую жесткость системы Пространственной ориентации .узлов 3, и исключить взаимное влияние полей Н-образных магнитопроводов одно на другое, т.е. обеспечить контроль шести компонентов перемещений в малом объеме трехгранного опорного уголка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для электромагнитного контроля многокомпонентных перемещений | 1986 |
|
SU1420345A1 |
| Устройство для контроля многокомпонентных перемещений | 1980 |
|
SU896657A1 |
| Устройство для контроля пространственных перемещений | 1990 |
|
SU1772600A1 |
| Устройство для контроля многокомпонентных перемещений объекта | 1981 |
|
SU1029200A1 |
| Преобразователь перемещений | 1985 |
|
SU1283516A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032882C1 |
| Манипулятор для неразрушающего контроля корпуса реактора | 1984 |
|
SU1263116A1 |
| Трехкоординатный преобразователь относительного перемещения двух объектов | 1989 |
|
SU1753247A1 |
| Поплавковый индуктивный уровнемер | 1980 |
|
SU916995A1 |
| Устройство для обнаружения короткозамкнутых витков в обмотках электрических машин | 1979 |
|
SU928258A1 |
ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ, содержащий первый обмоточньй узел, выполненный в виде Н-образного магнитопровода с размещенными на его . перемычке обмоткой возбуждения, а на плечах с измерительными обмотка- ми,о тлич ающий ся тем, что, с целью расширения функциональных возможностей за счет контроля многокомпонентных перемещений в труд нодоступных зонах, он снабжен корпусом из высокопроводящего материала в виде прямоугольного параллелепипеда квадратного сечения с размером стороны квадрата 1,8 Pj , где Сд, предельный размер Н-образного магнитопровода вдоль его перемычки,двумя идентичными первому обмоточными узлами, а на рабочих гранях корпусавыполнены три паза во взаимно ортогональных плоскостях глубиной 0,8 By , в которых размещены Обмоточные узлы (Л с зазором 0,2 дд до боковых стенок пазов. в у ю bo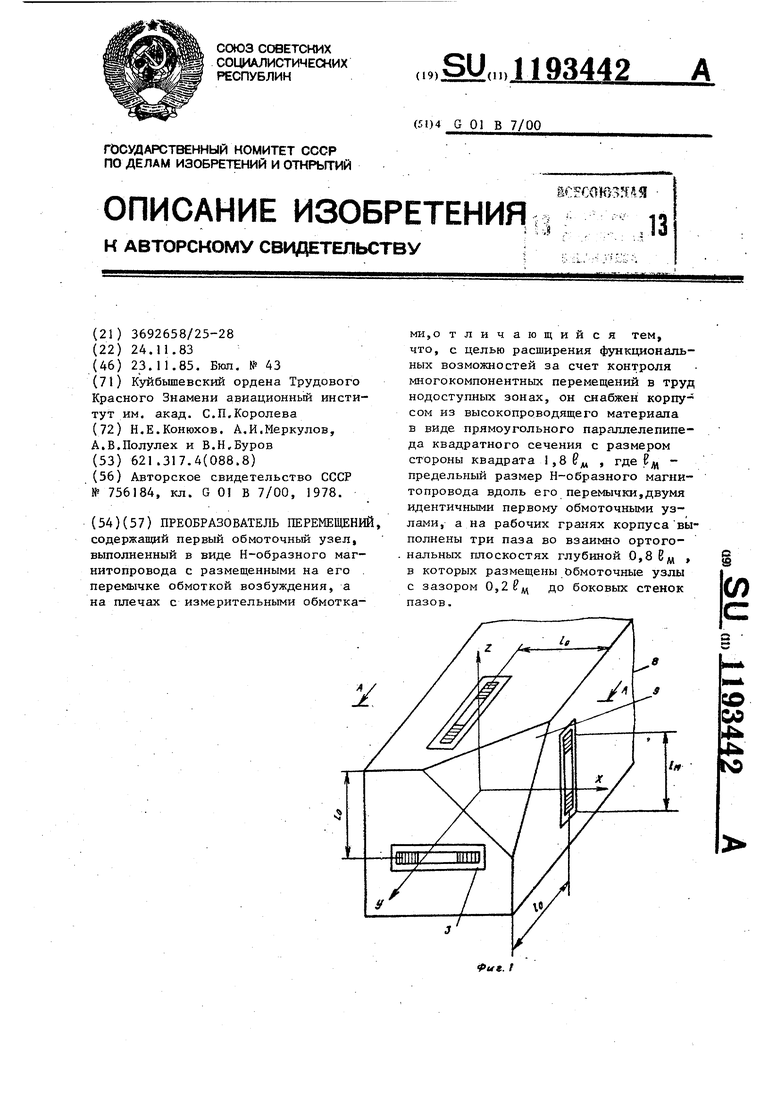
| Авторское свидетельство СССР № 756184, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
