Изобретение относится к измерительной технике и может быть использовано для контроля угловых перемещений одного или более вращающихся объектов, а также для алгебраического суммирования этих перемещений.
Целью изобретения является расширение области применения датчика угловых перемещений за счет обеспечения одновременного измерения углового перемещения также и второго объекта, который может быть расположен или ссосно, или под углом к первому объекту, в той же или в параллельной плоскости.
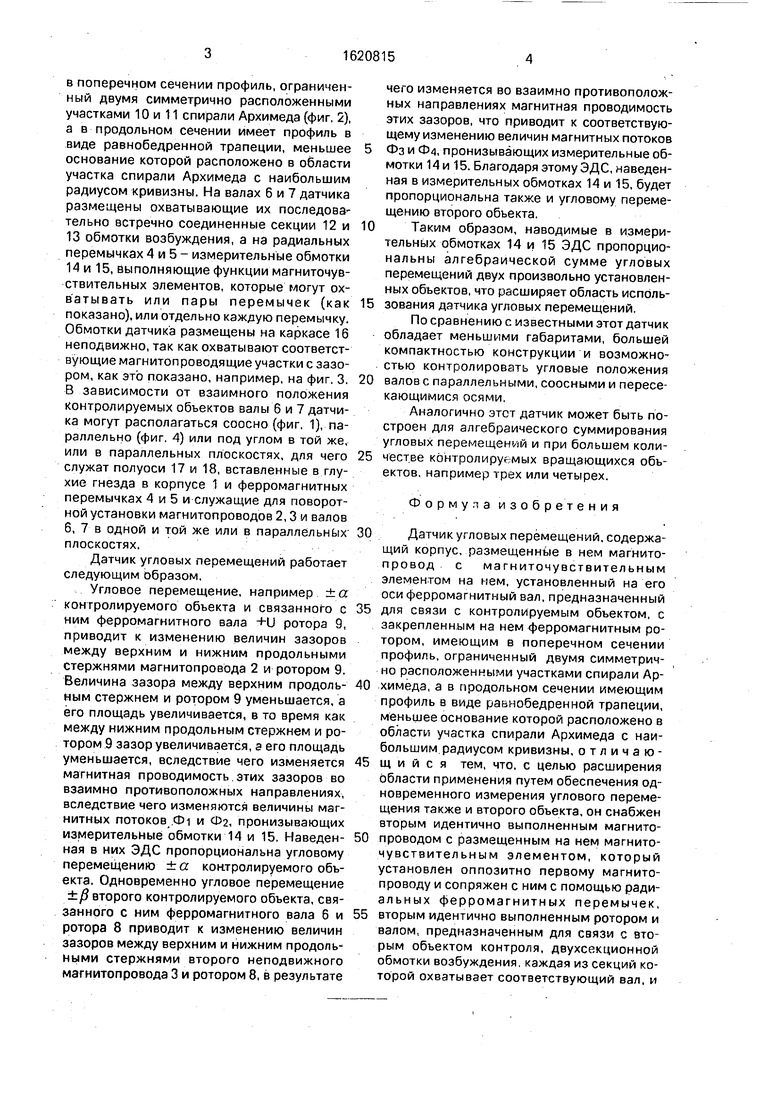
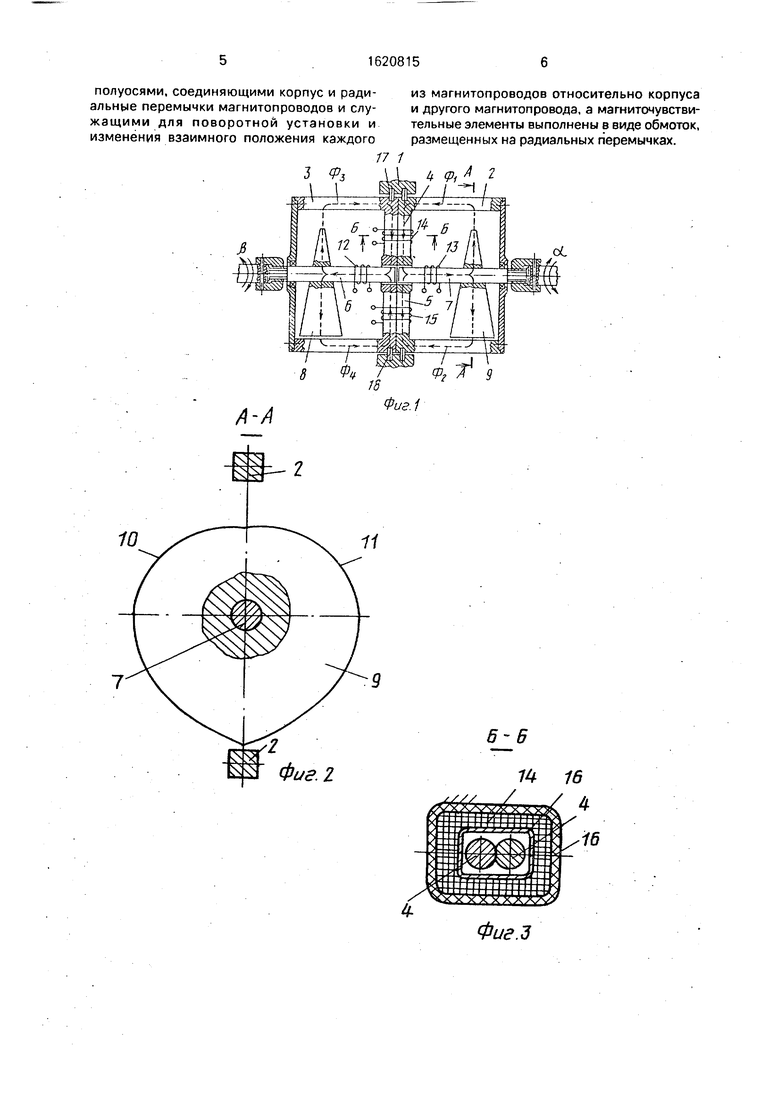
На фиг. 1 схематично показано конструктивное выполнение датчика угловых перемещений; на фиг. 2 и 3 - сечение А-А и
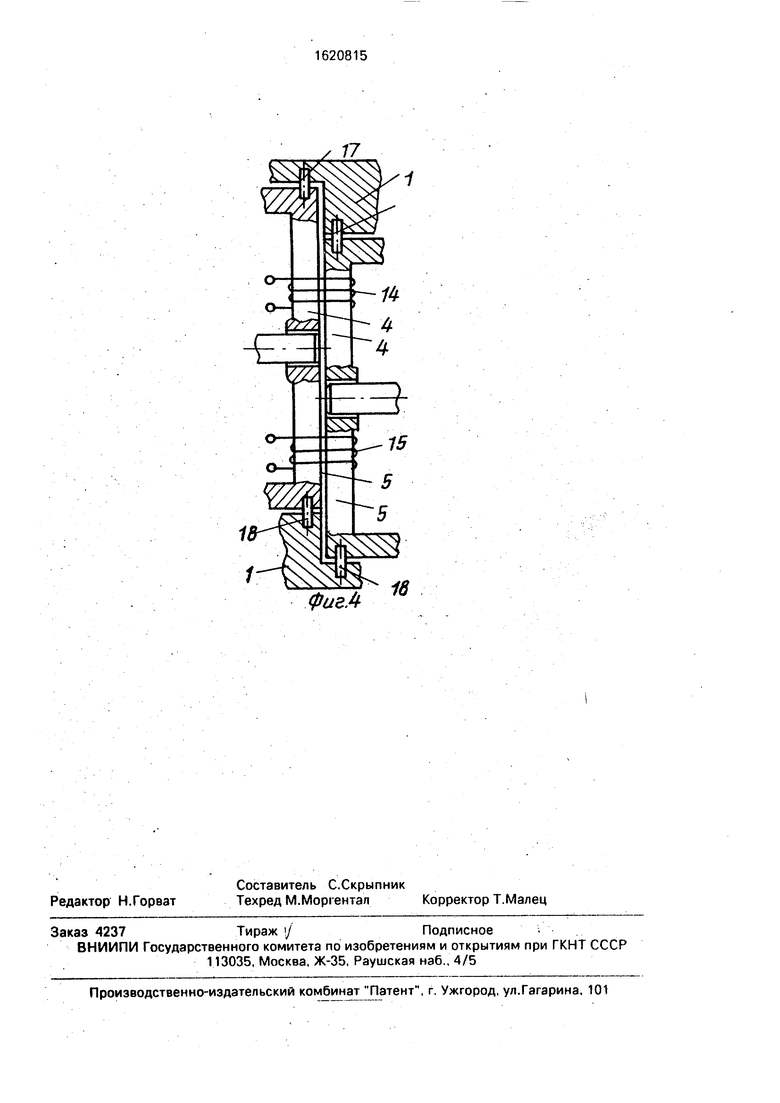
Б-Б на фиг. 1 соответственно; на фиг. 4 - установка магнитопроводов датчика в общем корпусе при контроле угловых перемещений двух объектов, расположенных в параллельных плоскостях.
Датчик угловых перемещений содержит корпус 1, в котором установлены с возможностью изменения взаимного положения два магнитопровода 2 и 3, сопряженные между собой с помощью радиальных ферромагнитных перемычек 4 и 5. На валах б и 7, предназначенных для связи с контролируемыми объектами и выполненных из ферромагнитного материала, закреплены ферромагнитные роторы 8 и 9, расположенные на оси симметрии соответствующего магнитопроэода. Каждый из роторов имеет
в поперечном сечении профиль, ограниченный двумя симметрично расположенными участками 10 и 11 спирали Архимеда (фиг. 2), а в продольном сечении имеет профиль в виде равнобедренной трапеции, меньшее основание которой расположено в области участка спирали Архимеда с наибольшим радиусом кривизны. На валах 6 и 7 датчика размещены охватывающие их последова тельно встречно соединенные секции 12 и
13обмотки возбуждения, а на радиальных перемычках 4 и 5 - измерительные обмотки
14и 15, выполняющие функции магниточув- ствительных элементов, которые могут охватывать или пары перемычек (как показано), или отдельно каждую перемычку. Обмотки датчика размещены на каркасе 16 неподвижно, так как охватывают соответствующие магнитопроводящие участки с зазором, как это показано, например, на фиг. 3. В зависимости от взаимного положения контролируемых объектов валы 6 и 7 датчика могут располагаться соосно (фиг. 1), параллельно (фиг. 4) или под углом в той же, или в параллельных плоскостях, для чего служат полуоси 17 и 18, вставленные в глухие гнезда в корпусе 1 и ферромагнитных перемычках 4 и 5 и служащие для поворотной установки магнитопроводов 2,3 и валов б, 7 в одной и той же или в параллельных плоскостях.
Датчик угловых перемещений работает следующим образом.
Угловое перемещение, например ±а контролируемого объекта и связанного с ним ферромагнитного вала +U ротора 9, приводит к изменению величин зазоров между верхним и нижним продольными стержнями магнитопровода 2 и ротором 9. Величина зазора между верхним продольным стержнем и ротором 9 уменьшается, а его площадь увеличивается, в то время как между нижним продольным стержнем и ротором 9 зазор увеличивается, а его площадь уменьшается, вследствие чего изменяется магнитная проводимость этих зазоров во взаимно противоположных направлениях, вследствие чего изменяются величины магнитных потоков Ф1 и Ф2, пронизывающих измерительные обмотки 14 и 15. Наведенная в них ЭДС пропорциональна угловому перемещению ±сс контролируемого объекта. Одновременно угловое перемещение ±{3 второго контролируемого объекта, связанного с ним ферромагнитного вала 6 и ротора 8 приводит к изменению величин зазоров между верхним и нижним продольными стержнями второго неподвижного магнитопровода 3 и ротором 8, в результате
чего изменяется во взаимно противоположных направлениях магнитная проводимость этих зазоров, что приводит к соответствующему изменению величин магнитных потоков
Фз и Фз, пронизывающих измерительные обмотки 14 и 15. Благодаря этому ЭДС, наведенная в измерительных обмотках 14 и 15, будет пропорциональна также и угловому перемещению второго объекта.
Таким образом, наводимые в измерительных обмотках 14 и 15 ЭДС пропорциональны алгебраической сумме угловых перемещений двух произвольно установленных объектов, что расширяет область использования датчика угловых перемещений.
По сравнению с известными этот датчик обладает меньшими габаритами, большей компактностью конструкции и возможностью контролировать угловые положения
валов с параллельными, соосными и пересекающимися осями.
Аналогично этот датчик может быть построен для алгебраического суммирования угловых перемещений и при большем количестве контролируемых вращающихся объектов, например трех или четырех.
Формула изобретения
Датчик угловых перемещений, содержащий корпус, размещенные в нем магнито- провод с магниточувствительным элементом на нем, установленный на его оси ферромагнитный вал. предназначенный
для связи с контролируемым объектом, с закрепленным на нем ферромагнитным ротором, имеющим в поперечном сечении профиль, ограниченный двумя симметрично расположенными участками спирали Архимеда, а в продольном сечении имеющим профиль в виде равнобедренной трапеции, меньшее основание которой расположено в области участка спирали Архимеда с наибольшим радиусом кривизны, отличающ и и с я тем, что. с целью расширения области применения путем обеспечения одновременного измерения углового перемещения также и второго объекта, он снабжен вторым идентично выполненным магнито0 проводом с размещенным на нем магнито- чувстаительным элементом, который установлен оппозитно первому магнито- проводу и сопряжен с ним с помощью ради- альных ферромагнитных перемычек,
5 вторым идентично выполненным ротором и валом, предназначенным для связи с вторым объектом контроля, двухсекционной обмотки возбуждения, каждая из секций которой охватывает соответствующий вал, и
полуосями, соединяющими корпус и радиальные перемычки магнитопроводов и служащими для поворотной установки и изменения взаимного положения каждого
из магнитопроводов относительно корпуса и другого магнитопровода, а магниточувстви- тельные элементы выполнены в виде обмоток, размещенных на радиальных перемычках.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2139495C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ВАЛА | 1997 |
|
RU2145053C1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| Механизм преобразования вращательного движения в сложное | 1989 |
|
SU1657804A1 |
| Датчик угловых перемещений Е.П.Абрамцева | 1985 |
|
SU1315790A1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ДВУХ ВАЛОВ | 1991 |
|
RU2010156C1 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |
| Датчик угловых перемещений | 1989 |
|
SU1768950A1 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
Изобретение относится к измерительной технике. Цель - расширение области применения датчика угловых перемещений вращающихся объектов: первый объект - за счет обеспечения одновременного измерения угловых перемещений и второй объект, который может быть расположен на соос- ной, параллельной или пересекающейся оси вращения. Датчик угловых перемещений содержит два оппозитно расположенных в корпусе 1 замкнутых магнитопровода 2 и 3, на радиальных перемычках 4 и 5 которых размещены измерительные отметки 14 и 15, а на ферромагнитных валах 6 и 7, установленных с возможностью независимого вращения (поворота) на углы а и/ соответственно, закреплены ферромагнитные роторы 8 и 9 и размещены охватывающие эти валы секций 12 и 13 обмотки возбуждения, которые создают магнитные потоки Ф1-Ф4 в магнитопроводя- щих частях датчика, изменяющиеся в зависимости от положения роторов 8 и 9, Роторы 8 и 9 имеют в поперечном сечении профиль, ограниченный двумя симметрично расположенными участками спирали Архимеда, а в продольном сечении они имеют вид равнобочной трапеции, благодаря чему при повороте роторов изменяются не только длина, но и площадь воздушных зазоров, отделяющих их от магнитопроводов 2 и 3, что обеспечивает высокую линейность преобразования угловых перемещений а и /3 . 4 ил.
3Ф:
А-А
10
Фиг.1
Фиг1
6-6
Фие.З
/
фигЛ
| Датчик угловых перемещений Е.П.Абрамцева | 1985 |
|
SU1315790A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
